一种直流侧电压调节的反作用飞轮直接转矩控制方法*
2022-11-03申向杰胡宏锦魏静波
申向杰 胡宏锦 魏静波 刘 昆
中山大学航空航天学院,深圳 518107
0 引言
航天器在轨运行时需要维持姿态或改变姿态,完成特定任务[1-3]。反作用飞轮是航天器姿态控制系统的重要执行机构,其主要功能是根据姿态控制系统的要求改变飞轮电机转速,输出反作用力矩,控制航天器姿态[4-5]。根据转子支承的不同,反作用飞轮分为机械轴承飞轮和磁悬浮轴承飞轮[6]。两种反作用飞轮均采用无铁芯无齿槽无刷直流电机(Brushless Direct Current Motor, BLDCM)驱动,具有铁心损耗小、磁阻力矩波动小、控制简单等优势[6-11]。反作用飞轮BLDCM输出电磁力矩的精度直接影响航天器姿态控制精度,如何减小其输出力矩的脉动,一直是反作用飞轮的研究重点与难点。
学者们主要从电机结构优化和控制策略改进两方面对无刷直流电机转矩脉动进行抑制。结构优化方法主要用于抑制电机的齿槽转矩脉动,而反作用飞轮电机采用无铁芯无齿槽结构,齿槽转矩脉动得以消除[10]。因此,飞轮电机转矩脉动的主要来源是非理想反电动势引起的转矩脉动、绕组电流换相时产生的转矩脉动和PWM调制引起的非换相转矩脉动。文献[11]针对磁悬浮飞轮电机非理想反电动势提出PWM补偿控制策略,提高了飞轮输出力矩的精度;文献[12]提出一种新型单周期平均转矩控制算法来抑制非理想梯形反电动势引起的转矩脉动;文献[13]采用多霍尔位置传感器并优化转速观测器来提高转速模式下飞轮力矩输出精度;文献[14]分析了矢量坐标系下传统两相运行时的换相转矩脉动,提出具有矢量控制的新型驱动方法来最小化换相转矩脉动;文献[15]采用三相逆变桥前级加BUCK变换器,提出一种电机转速、相电流、直流侧电压和电感电流四闭环控制方法来抑制转矩脉动;文献[16]提出一种基于电容器切换的直流母线电压调制方案来减小换相转矩脉动。
反作用飞轮多采用母线电流闭环的驱动方式,控制母线电流,复现转矩指令。该驱动方式仍存在不足,母线电流会受到内环流的影响,引起力矩波动,使转矩输出性能变差[17]。以直接转矩控制理论为基础,将无刷直流电机电磁转矩作为直接控制量来抑制电机转矩脉动,电机转矩特性可得到提升。文献[18]提出了无刷直流电机两相导通的电压空间矢量定义方法,并给出一种两相导通的直接转矩系统设计方法;文献[19]提出一种换相时两两导通与三三导通结合的改进型直接转矩控制策略,换相转矩脉动得到抑制;文献[20]在传统直接转矩控制的基础上采用磁链三电平比较器进一步抑制了非换相时的转矩脉动;文献[21]根据无刷直流电机的特点,在其直接转矩控制中,省去磁链观测环节,分析了电压矢量和电机转矩之间的关系,给出了最优电压矢量选择依据;文献[22]对两相导通时零矢量对转矩变化规律进行理论分析,提出了一种基于零矢量的电压矢量选择表。
在传统直接转矩控制中,电机的直流侧电压选取偏大会导致转矩波动大的异常情况。因此,利用合适的直流侧电压调节策略可有效抑制转矩脉动。本文对飞轮电机换相时和非换相时的转矩脉动进行建模,基于转矩脉动模型,设计直流侧电压调节策略,提出一种基于直流侧电压调节的直接转矩控制方法。该方法可有效抑制飞轮电机输出转矩脉动,改善输出转矩性能。
1 转矩脉动分析
1.1 BLDCM数学模型
BLDCM驱动电路拓扑如图1所示。前级采用BUCK电路拓扑,Cin和Co为输入和输出电容,D为续流二极管,Lo为BUCK电路电感,VT0为BUCK电路开关管;逆变器采用电压源型逆变电路,VT1-VT6为三相逆变桥开关管,采用两相导通的三相六状态;BLDCM三相绕组为Y型连接。
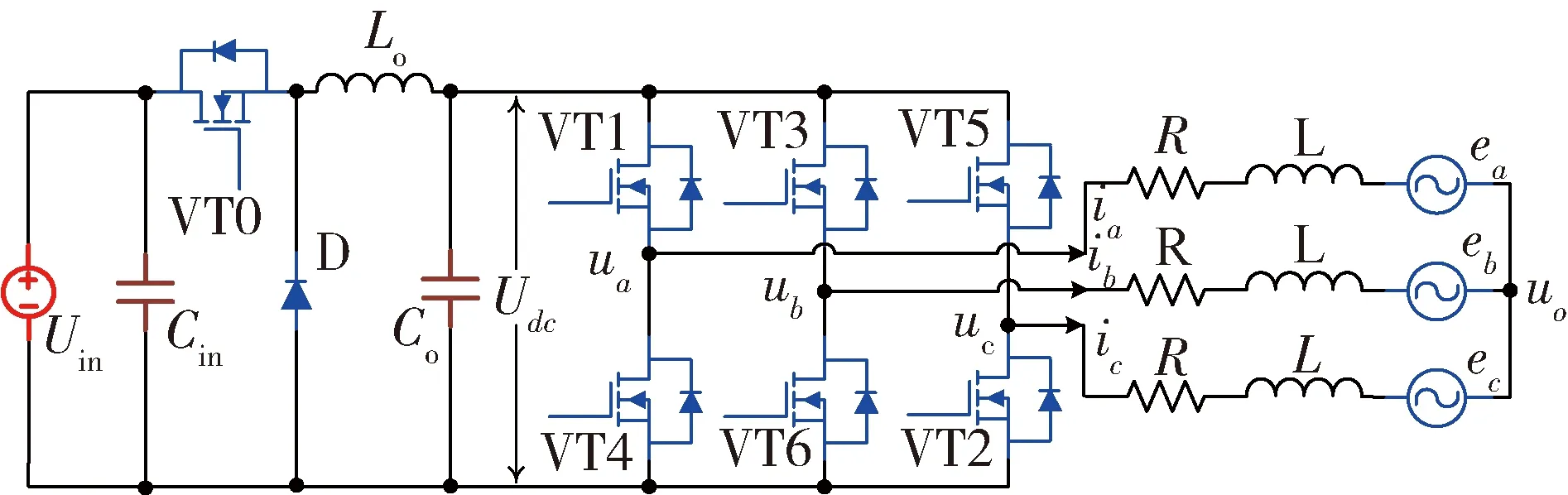
图1 BLDCM驱动电路拓扑
BUCK电路中
Udc=dUin
(1)
式中,Uin为输入电压;Udc为直流侧电压;d为BUCK电路开关管VT0的占空比。
忽略磁滞损耗和磁路饱和,BLDCM三相绕组电压平衡方程为
(2)
式中,ua,ub和uc分别为A,B和C三相绕组相电压;ia,ib和ic为三相绕组电流;R为每相绕组相电阻值;L为每相绕组电感值;ea,eb和ec为A,B和C三相的反电动势。
BLDCM的电磁转矩表达式为
(3)
式中,ω为电机机械角速度。
对绕组为Y型连接的无刷直流电机有
ia+ib+ic=0
(4)
1.2 非换相时转矩脉动
非换相时的电磁转矩由两相绕组的合成磁动势与转子永磁磁动势相互作用产生。以A、C两相导通为例,绕组中的电流为:
ib=0,ia=-ic=I(t)
(5)
式中,I(t)为t时刻A、C两相绕组中的电流。
假定电机各绕组的反电动势为平顶宽大于或等于120°电角度的梯形波,故A和C相反电动势为:
ea=E,ec=-E
(6)
式中,E为A和C两相绕组反电动势幅值。
反电动势幅值与转速关系为:
E=Keω
(7)
式中,Ke为反电动势系数。
由式(3)~(6)可得,非换相时的电磁转矩为:
(8)
在非换相阶段,BLDCM三相电压平衡方程为:
(9)
取某一时刻为0时刻,假设该时刻A和C两相绕组中电流为Inon-com(0),t时刻电流为Inon-com(t),根据式(5)~(9)可得,t时刻转矩如式(10)。
(10)
当t→0时,电磁转矩为

(11)
由上述分析可知,在非换相阶段,电机电磁转矩脉动主要由2部分产生,一部分受端电压与反电动势影响,另一部分为电流纹波带来的转矩波动。当电机处于低速段且端电压较高时,第一部分引起的转矩脉动占主导。
1.3 换相时转矩脉动
BLDCM逆变桥的开关状态改变会引起电机绕组中的电流产生换相。每次换相都会对电磁转矩产生影响,引起转矩波动。
以A和C两相导通过渡到B和C两相导通为例,由图1可知,此时,A相上桥臂VT1关断,B相上桥臂VT3导通,C相下桥臂VT2仍保持导通状态。由于反电动势为120°电角度的梯形波,故三相绕组反电动势为:
ea=eb=-ec=E
(12)
式中,E为换相瞬间A,B和C三相绕组的反电动势。
由式(2)可得换相过程的电路平衡方程为
(13)
取某一时刻为0时刻,假设该时刻C相绕组中电流为Icom(0),t′时刻电流为Icom(t′),根据式(3)与式(12)~(13)可得t′时刻转矩如式(14)。
(14)
当t′→0时,电磁转矩为

(15)
与非换相阶段相同,电机电磁转矩脉动也主要由2部分产生,一部分受端电压与反电动势影响,另一部分由电流纹波产生。
由式(11)和(15),非换相阶段与换相阶段的转矩模型不同,在换相时刻,电流不发生突变,有Inon-com=Icom,当端电压维持不变时,电磁转矩会产生跳变,转矩跳变量为
(16)
式(16)的转矩脉动为三相逆变桥开关管状态切换时引起的原理性转矩跳变。
2 直流侧电压调节的转矩脉动抑制
反作用飞轮无刷直流电机的绕组电感小[22],由式(11)、(15)和(16)可知,当直流侧电压维持在额定电压、飞轮电机处于低转速时,直流侧电压、反电动势和绕组电感共同作用产生剧烈的转矩脉动。同时,较高的直流侧电压会在绕组中产生较大的电流纹波,造成转矩波动。调节反作用飞轮电机的直流侧电压可减小电流纹波,抑制输出转矩脉动。
本文采用直接转矩控制约束力矩波动,并抑制换相产生的转矩跳变;根据反作用飞轮电机转矩脉动模型,设计直流侧电压调节策略,抑制电磁转矩的原理性跳变,改善飞轮电机输出转矩特性。
2.1 直接转矩控制
根据空间电压矢量理论[23],BLDCM合成电压矢量为
(17)
式中,α为旋转因子,α=ej2π/3。
以A相关断、BC相导通为例,由式(2)得,ua=0,ub=0.5Udc,uc=-0.5Udc。合成的电压矢量为
(18)
式(18)的电压矢量与开关管状态及直流侧电压有关。
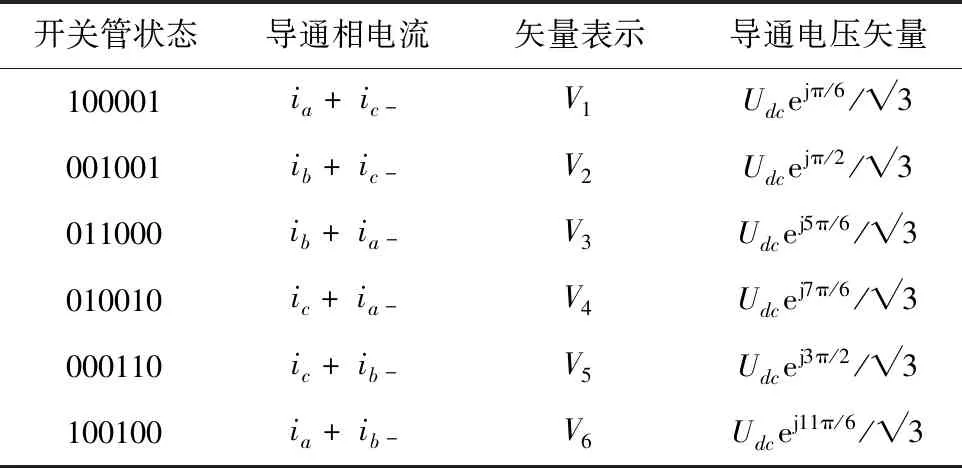
将6个开关管的开关状态用数字量表示,1代表导通,0代表关断,两两导通的逆变器共有6个导通状态和一个全关断状态。6个通电状态对应的导通相电压矢量如表1所示,相电压非零矢量空间分布如图2所示,图中a,b和c为BLDCM三相绕组的空间分布。当转子磁链位于第Ⅰ扇区时,定子磁链也位于第Ⅰ扇区,此时最优的空间矢量为V2,同理可得其它5个扇区的最优导通相电压矢量,如表2所示。
电机的电磁转矩可表示为
Te=km|Ψs||Ψr|sinθ
(19)
式中,km为转矩系数;Ψs和Ψr为定子和转子磁链;θ为定转子磁链之间的夹角,即磁通角。

当ΔTe≤-ξm时,τ为“1”,在τ= 1作用下,非零矢量施加到电机上,定子磁链向前旋转,θ增大,Te增大,ΔTe增大。当ΔTe≥ξm时,τ为“0”,此时,电机接通零电压矢量,定子磁链静止不动,θ减小,Te减小,ΔTe减小。
根据DTC原理,在最优非零电压矢量中插入零电压矢量,对表2进行扩展,可得表3所示电压矢量选择表。根据霍尔传感器的状态确定无刷直流电机转子磁链的位置,霍尔位置信号与转子磁链所处扇区的对应关系如表4所示。根据表3选择最优的导通相电压矢量[24-25]。
2.2 直流侧电压调节策略设计
取转速ω为飞轮电机运行状态量,设计直流侧电压控制律如式(20)所示。
Udc=f(ω) (20)

图2 非零电压矢量空间分布图
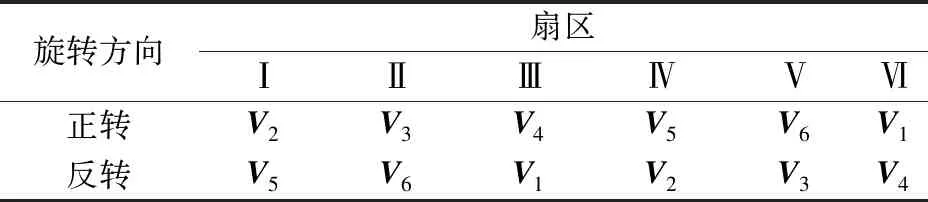
表2 无刷直流电机最优导通相电压矢量选择表
图3 直接转矩控制器及内部结构
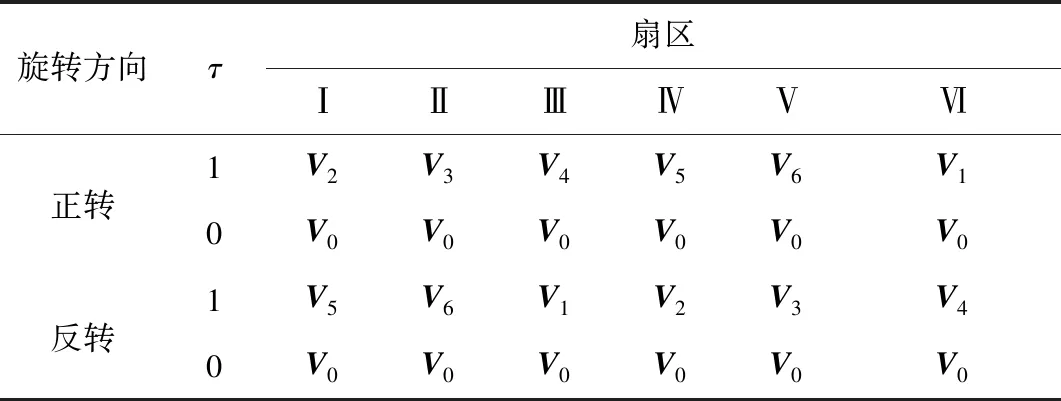
表3 无刷直流电机DTC最优导通相电压矢量选择表
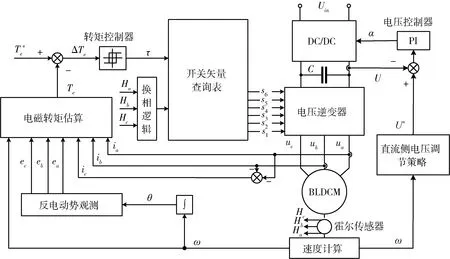
图4 直流侧电压调节的飞轮无刷直流电机控制系统框图
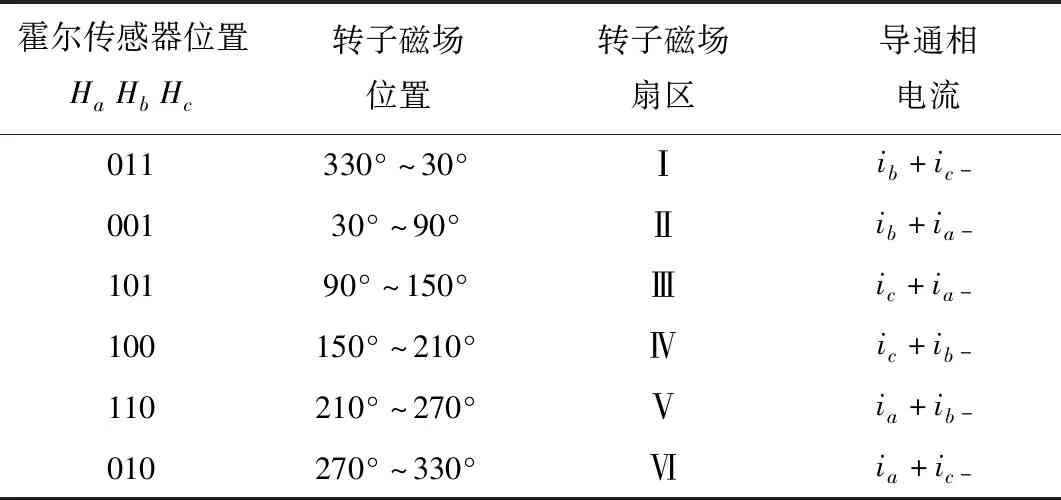
表4 霍尔位置传感器信号与转子磁场所处扇区的对应关系
使飞轮电机输出转矩脉动最小。
根据式(11)和(15)得,总体的转矩脉动为
J=λ1(ΔTe)non-com+λ2(ΔTe)com=
(21)
式中,(ΔTe)non-com和(ΔTe)com分别为换相阶段、非换相阶段的转矩脉动;λ1和λ2为权重因子,表征两种转矩脉动对输出转矩产生的影响。
根据式(21),当直流侧电压满足
(22)
输出转矩脉动最小。
设计系统控制框图如图4所示。转矩控制器采用磁链自适应的直接转矩控制器。直流侧电压调节策略采用式(22)的控制律,电压控制器采用PI控制器。根据电机运行状态,经设计的控制策略,调节直流侧电压值,经过三相逆变器施加到飞轮电机。
3 实验分析
为验证所提方法的有效性,在反作用飞轮样机上进行了实验研究。反作用飞轮的控制器采用TI公司的TMS320F28379D型号DSP控制板,实验平台如图5所示。反作用飞轮参数如表5所示。
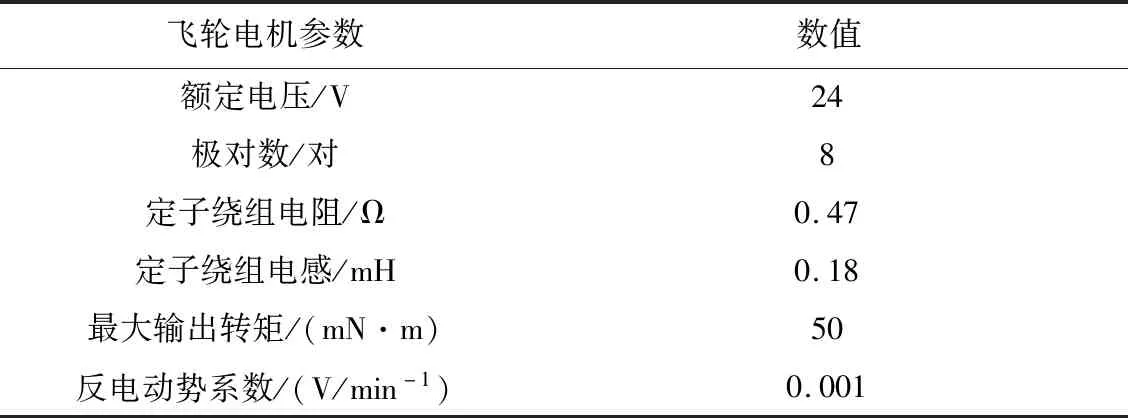
表5 反作用飞轮电机参数
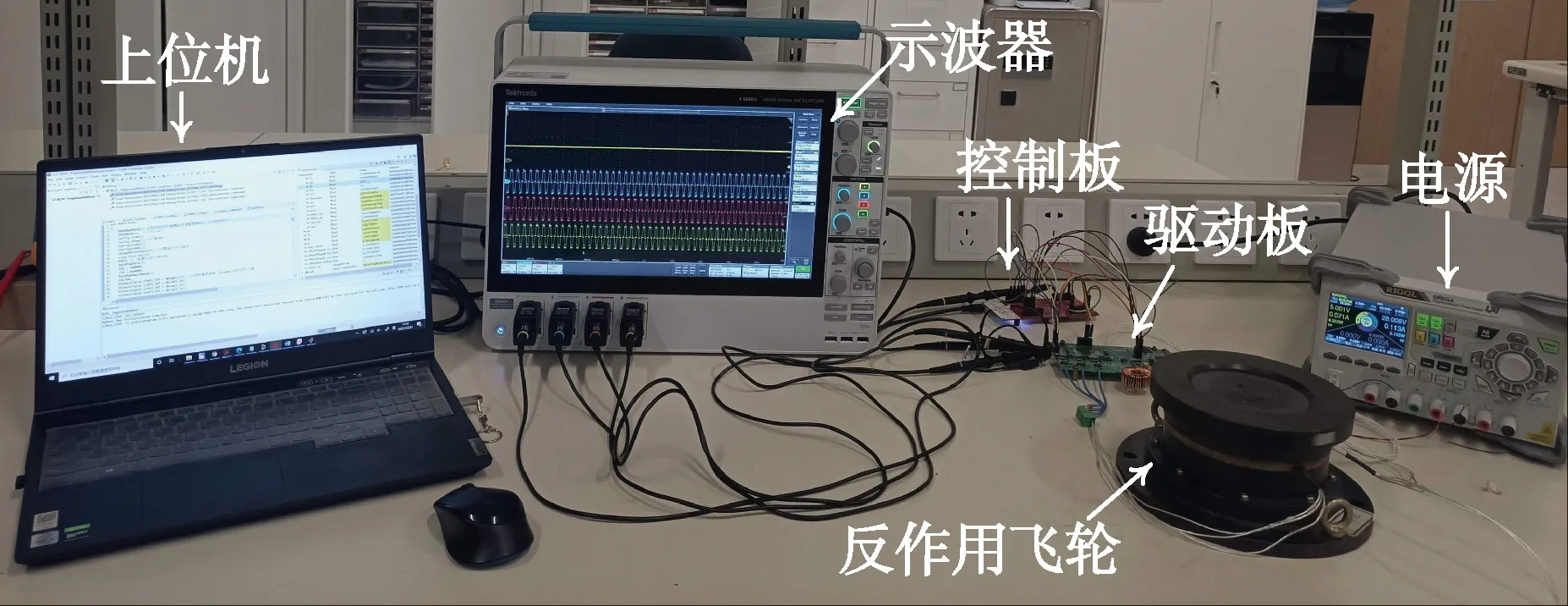
图5 反作用飞轮试验平台
BUCK变换器参数:电感Lo为1mH,输出电容Co为220μF,开关管VT0频率为20kHz。转矩环滞环比较器环宽ξm=1mN·m,电压环PID为Kp=0.01,Ki=5。
飞轮电机输出转矩为30mN·m,采用直流侧电压调节策略前后输出转矩曲线如图6所示,转矩脉动定量对比如表6所示。反作用飞轮电机转矩波动系数根据式(23)计算。
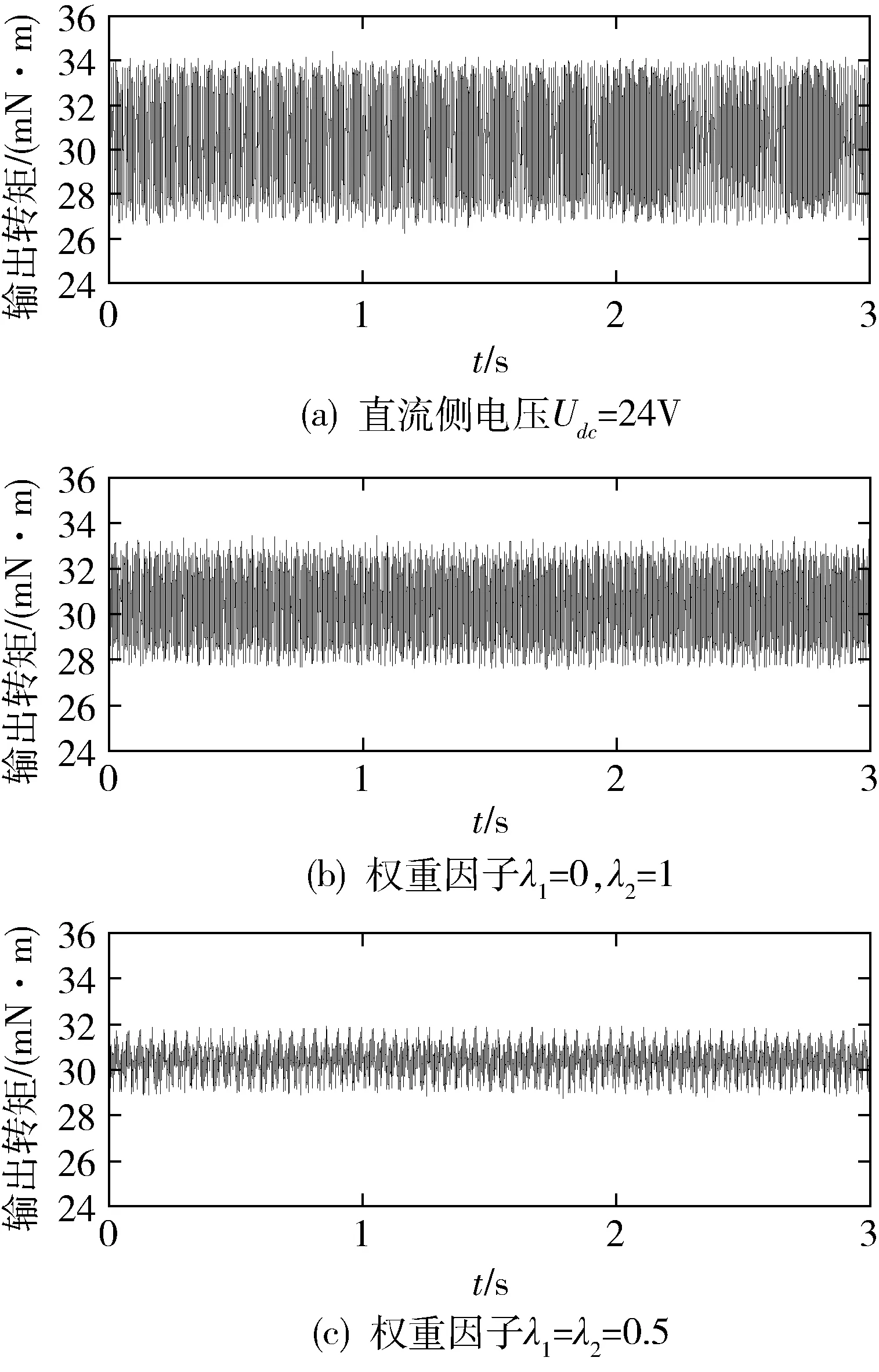
图6 采用直流侧电压调节策略前后的输出转矩曲线
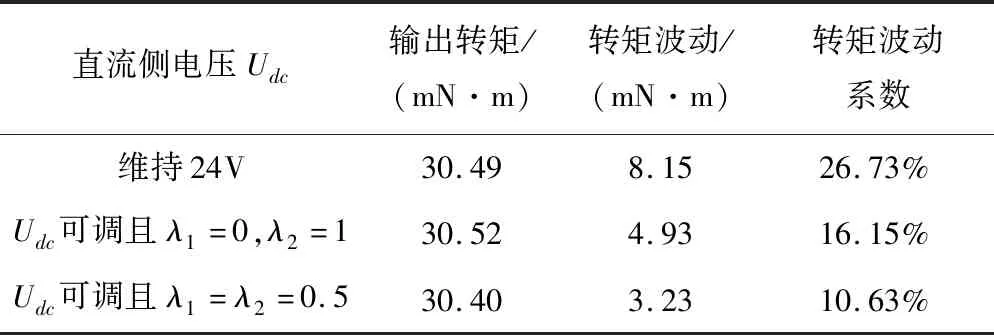
表6 飞轮电机输出30mN·m转矩波动对比

(23)
式中,ΔTe为转矩波动;(Te)max、(Te)min、(Te)avg分别为输出转矩的最大值、最小值和平均值。
飞轮电机输出转矩为50mN·m,采用直流侧电压调节策略前后输出转矩曲线如图7所示,转矩脉动定量对比如表7所示。
由图6~7知,采用直接转矩控制后,飞轮电机转矩无明显的换相转矩脉动。当直流侧电压维持24V时,输出转矩仍存在较大的转矩波动。
由图6(b)和图7(b)可知,采用本文策略后,输出转矩30mN·m和50mN·m时,转矩波动分别降低了10.58%和4.79%。当调节权重因子λ1=λ2=0.5时,转矩脉动得到进一步抑制,转矩波动系数分别降低至10.63%和10.23%。实验结果表明,本文方法改善了输出转矩的整体性能,提高了转矩的控制精度。
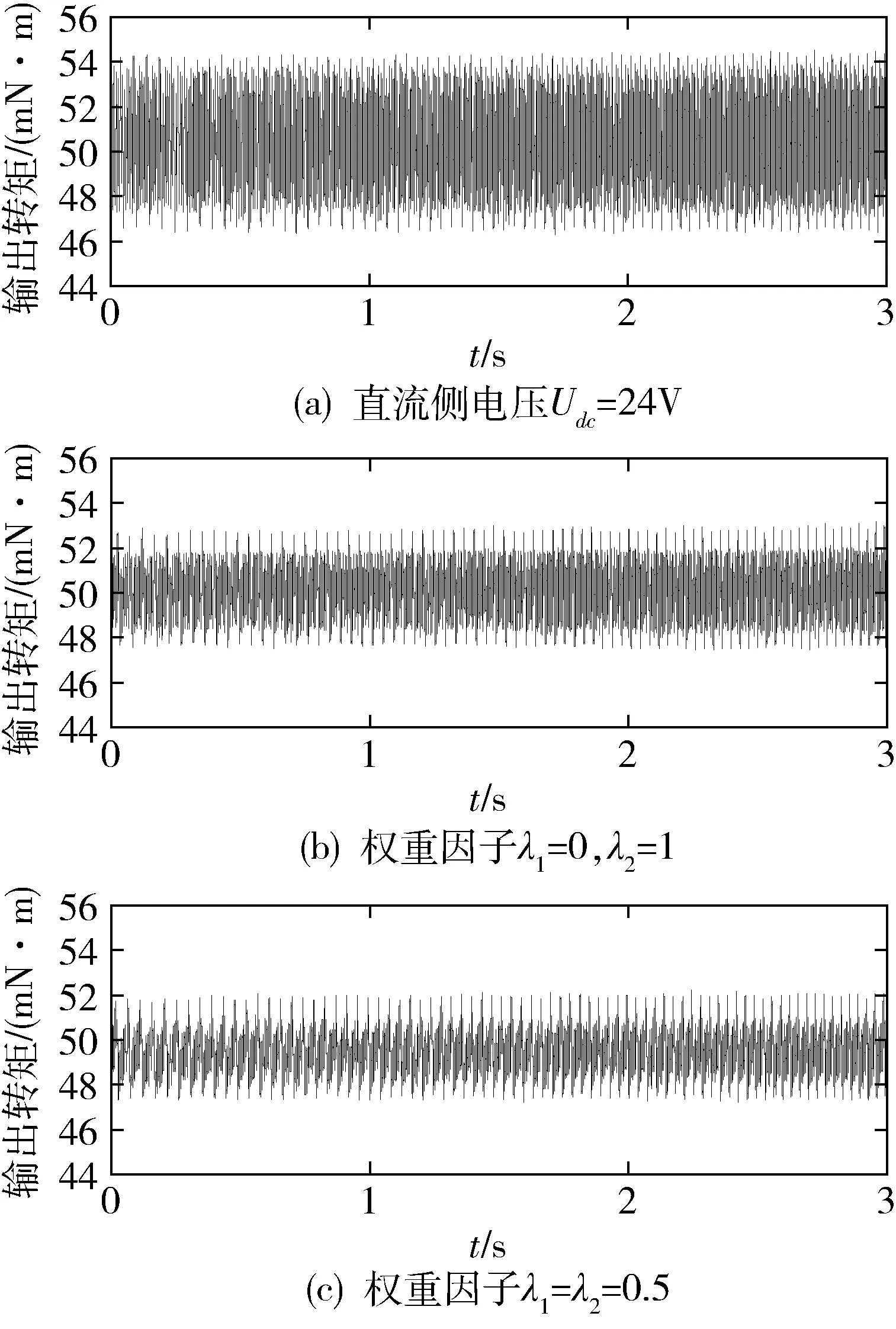
图7 采用直流侧电压调节策略前后的输出转矩曲线
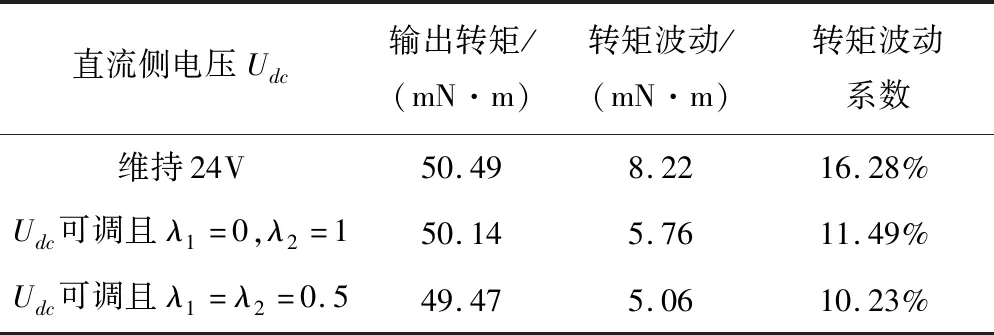
表7 飞轮电机输出50mN·m转矩波动对比
4 结论
提出一种基于直流侧电压调节策略的直接转矩控制方法,理论分析了直流侧电压、反电动势、绕组电感和电机换相对输出转矩的影响。对本文方法进行实验验证,合理选取直流侧电压调节策略的权重因子,可有效抑制反作用飞轮转矩脉动,输出转矩30mN·m和50mN·m时,取权重因子λ1=λ2=0.5,转矩脉动减小为10.63%和10.23%,改善了输出转矩的整体特性,提高了反作用飞轮输出转矩的控制精度。
