拦截高速机动目标的自适应积分滑模饱和制导律
2022-11-03陈宝文孙经广
陈宝文 孙经广
1. 深圳信息职业技术学院 软件学院,深圳 518172 2. 江苏自动化研究所,连云港 222061
0 引言
高速飞行器技术的快速发展,对拦截导弹的飞行速度和机动性能提出了更高的要求[1-3]。目前导弹末端的主要拦截方式不再适用于拦截高速飞行的机动目标[4-5]。
目前防御武器的拦截方式是拦截者的速度大于目标的速度时,采用尾追拦截,相反采用迎头拦截。与高速机动目标相比,拦截导弹不再具有速度上的优势,因此,传统的制导方式很难保证高拦截概率。为拦截高速大机动目标,文献[6]首次提出前向制导方式,使得弹目运动速度相对较小,末端制导时间变长,增大攻击区域。滑模控制对系统内部参数的摄动和外界的干扰具有强的鲁棒性,因此,在飞行器制导控制系统设计中得到了广泛应用[7-9]。文献[10-11] 针对二维平面内拦截高速机动目标,采用前向制导方式设计了自适应滑模制导律。文献[12]以拦截高速飞行器为目标,通过联合滑模控制和自适应技术,设计了自适应滑模三维制导律,但没有考虑执行器输入受限情况。文献[13]针对拦截高速机动目标,利用逆轨拦截方式,结合最优控制理论和双曲正弦函数,设计了带有角度约束的三维最优制导律。
在实际制导过程中,导弹的加速度指令具有一定的物理约束条件,若在制导律设计过程中不考虑输入受限,则可能导致制导系统性能的下降,甚至引起整个制导闭环系统的不稳定[14]。文献[15-16]在制导律中引入双曲正切函数解决了导弹执行器输入受限问题。文献[17-18]基于指令滤波反步控制方法,分别设计了满足输入饱和约束的二维和三维制导律。
为了拦截高速飞行目标,本文采用前向制导方式,基于自适应方法、积分滑模控制理论和辅助系统,分别设计了自适应滑模三维制导律和抗饱和的自适应滑模三维制导律。
1 问题描述
采用前向制导方法,三维的弹目相对运动几何关系如图1所示。
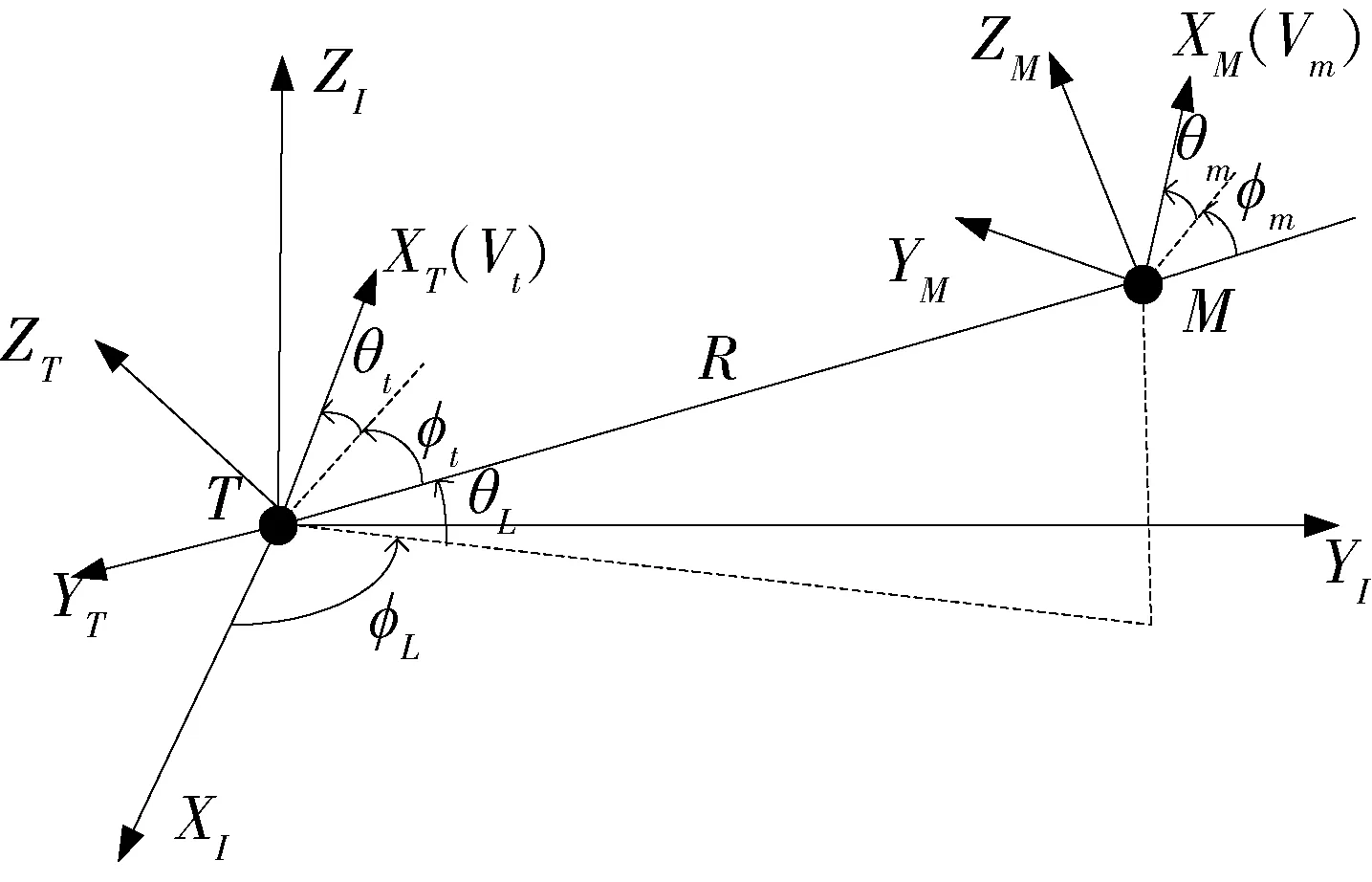
图1 三维弹目相对运动几何示意图
则拦截机动目标的三维弹目相对运动学模型[12]如下:
(1)
(2)
(3)
(4)

(5)
(6)

(7)
其中,T为目标,M为拦截弹。Vt和Vm分别是目标的速度和拦截弹的速度;θL和φL分别是视线关于参考坐标系的仰角和方位角。θt和φt为目标速度矢量前置角;θm和φm为拦截弹速度矢量前置角。ayt和azt是目标的加速度,aym和azm是拦截弹的加速度。
在设计过程中要求下式成立
θm=n1θt
(8)
φm=n2φt
(9)
其中,n1和2均为大于1的常数。保证式(8)和(9)中θm和φm分别随着θt和φt的衰减而衰减。
(10)
(11)
E=
2 制导律设计
针对制导模型式(10)和(11),利用积分滑模控制理论、自适应方法和辅助系统,分别设计了自适应积分滑模制导律和自适应饱和积分滑模控制律。
2.1 自适应积分滑模制导律设计
为满足前向制导条件,令
ei=xi-niyi(i=1,2)
(12)
设计带有自适应增益的积分滑模面为
(13)

对式(13)求导可得

(14)
其中,niMi为系统干扰项。
为方便制导律的设计,给出以下相关假设和引理。
假设1:假设系统干扰项niMi存在未知上界,即|niMi|≤dMi,且dMi为未知正常数。

为有效处理外部扰动,利用自适应算法对干扰上界进行估计,根据式(14),设计自适应积分滑模三维前向制导律。

(15)
(16)
(17)
其中,k2,k3,1,γi和pi为正常数,0<β<1。
定理1:针对系统式(11),在假设1条件下,当外部扰动上界未知时,在制导律(15)和自适应律式(16)~(17)的作用下,滑模变量si是实际有限时间稳定的,则ei在有限时间内收敛到任意小区域内。
证明:选取Lyapunov函数
(18)

对式(18)求导可得

(19)
根据
(20)
将式(20)代入(19)中可得

(21)
对满足δ1>1/2的正常数δ1,可使得下列不等式成立

(22)
将式(22)代入(21)中,整理可得
(23)

选择李雅普诺夫函数
(24)

利用式(15)和(17),对式(24)求导整理得
(25)
根据
(26)
将式(26)代入(25)中,整理可得
(27)

2.2 自适应饱和积分滑模制导律设计
考虑输入受限,前向制导模型可重写为
ei=Bisat(ui)+Fi-niMi-niEi
(28)
根据式(28)对(13)求导可得
Bisat(ui)+Fi-niMi-niEi+
(29)
为了处理饱和约束,引入如下的辅助系统
(30)
其中,Δui=ui-uic,uic为需要设计的控制输入,ηi为辅助系统状态量,σ,kη和kη1为正常数。
设计自适应抗饱和积分滑模三维制导律

(31)
(32)
(33)
定理2:针对三维制导系统式(28),在假设1条件下,当外部扰动上界未知时,在制导律式(31)的作用下,滑模面si为实际有限时间稳定的,可使得则ei在有限时间内收敛任意小区域内。
证明:选取Lyapunov函数
(34)
对式(34)求导并代入(31)和(33)整理得
(35)
根据
siBiΔui-|siBiΔui|≤0
(36)
(37)
将式(36)和(37)代入(35)整理可得
(38)
根据式(20)和(22),则式(38)可整理为
(39)
选择李雅普诺夫函数
(40)
利用式(32)和(33),对式(40)求导并整理可得
(41)

3 仿真校验
为了验证制导律的有效性。初始参数为:弹目相对距离为5000m,目标位置为:(0m,0m,0m),拦截弹位置为(4820m,1020m,-870m),视线角值为θL=-10°和φL=-12°,导弹前置角为θm(0)=-20°和φm(0)=-15°,目标前置角为θt=-20°和φt=-15°,导弹的速度为1500m/s,目标的速度为2100m/s,目标的加速度为2g。
3.1 自适应积分滑模制导律仿真分析
为表明本文制导策略的鲁棒性,与文献[7]中的简称为SMGL的制导律进行仿真对比。为对比简便,自适应积分滑模制导律简写为ATSMGL。制导参数选取:k2=0.2、k3=0.5、1=0.02、γi=0.05、pi=0.01、β=0.62和α1=0.7,其仿真结果如图2~3所示。表1给出了2种制导律所产生的脱靶量和拦截时间。
图2给出的是视线倾角θm,θt曲线和视线偏角φm,φt曲线,从图中可看出,在ATSMGL作用下,θm与θt快速保持倍数关系且迅速随着θt收敛到0,而在SMGL作用下,θt收敛速度较慢。图3给出导弹加速度的曲线,从图中可看出,在ATSMGL作用下的加速度曲线变化连续光滑且抖振小。从表1可以看出,这两种制导律均能使导弹成功拦截目标。
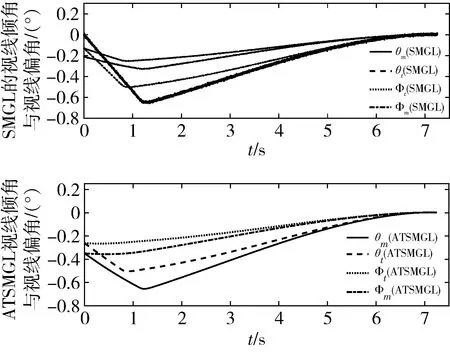
图2 视线倾角和视线偏角曲线
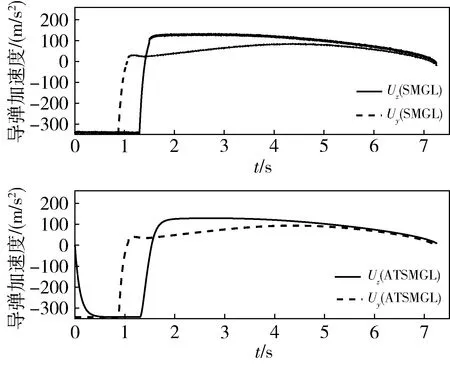
图3 导弹加速度曲线
3.2 自适应饱和积分滑模制导律仿真分析
为了验证所设计的抗饱和制导律式(31)的有效性,对以下2种目标机动进行仿真分析:
情况1:常值机动azt=ayt=2g;
情况2:余弦机动azt=ayt=2cos(2t)g。
制导律参数选取σ=0.01,kη1=1.25和kη=0.5。其仿真结果如图4~5所示。表2给出了2种目标机动情况下的脱靶量和拦截时间。
从表2可知,针对不同目标运动形式,导弹都能成功拦截。图4给出的是视线倾角θm,θt曲线和视线偏角θm和θt曲线,从图中可以看出,视线倾角和视线偏角在较短时间内能够快速收敛到,0。从导弹加速度曲线图5可以看出,针对不同目标机动形式,加速度值被限制在合理的范围内,充分证明了制导律的有效性。
图4 视线倾角和视线偏角曲线
图5 导弹加速度曲线
4 结论
针对高速机动飞行器的拦截问题,利用前向制导方法,对拦截高速机动目标的制导问题进行了研究分析,主要结论如下
1) 在设计新型的自适应积分终端滑模面基础上,结合自适应方法设计了自适应积分滑模制导律;
2) 通过引入辅助系统处理输入饱和问题,设计了抗饱和的自适应积分制导律,能够保证系统滑模面为实际有限时间稳定的;
3) 利用李雅普诺夫函数对所设计制导律给出了稳定性证明,并利用数字仿真验证了所设计制导律的有效性。
