多无人系统的事件触发控制算法
2022-11-03孔祥磊汪芳琴董怡泽
孔祥磊 汪芳琴 董怡泽 邢 哲 王 超 高 冀
中国空间技术研究院,卫星应用总体部,北京 100094
0 引 言
伴随复杂的战场环境,多无人机协同作战成为争夺未来战争制空权的翘楚,其潜在的军事应用价值包括且不限于侦察监视、反潜、战果评估、电子对抗等。随着分布式控制方法、编队控制理论等成果的进一步研究,多无人机系统的协同控制研究成为越来越多学者关注的重点。近些年,国内外对多无人机系统的协同控制研究主要集中在基于领航者-跟随者模型的编队控制[1-3]、基于行为的队形控制[4]、虚拟结构控制[5-6]等等。
受空间因素的制约,多无人机协同执行任务过程中,合理的避碰是其协同控制研究必须要考虑的问题。一种基本的约束是,在合理的控制器下,系统中每个无人机在运动过程中避开其他移动的无人机。在文献[7]中,作者提出了一类新型多无人机编队,即,系统中所有无人机最终状态满足彼此之间距离不低于指定值,且系统中无人机之间通信情况根据传感器感应距离唯一确定。基于此,作者设计了一类连续可微的控制律,保证了多无人机系统演化过程中避碰且最终达到指定队形。同时,作者讨论了有界范围内多无人机系统的避碰编队控制,并给出了相应控制律设计方法。在文献[8]中,作者进一步讨论了一类非完整约束动力学系统的控制问题,并给出了实现上述编队队形且避碰的控制律设计方法。对上述控制方法进一步推广,在文献[9]中,作者通过设计包含避碰控制的控制律,解决了具有领航者的多无人机系统包围控制问题。
在实际应用中,由于无人机自身设备的限制(储能量、计算能力、控制器等)以及通信网络(带宽、吞吐量、功率等)的制约,多无人机之间连续实时的交互是一种几乎难以实现的情形。应用事件触发控制策略能够在保持系统性能的同时,有效减少采样和信息传输的次数,从而降低无人机自身能量和网络等有限资源的消耗。在无人机系统中,对事件触发通信方式的研究可以追溯到文献[10],其中,作者通过将事件触发通信方式引入到多无人机系统,给出了基于事件驱动的多无人机系统一致性控制律。此后,由于事件触发策略在减少不必要的采样和传输方面具有的优越性,基于事件触发的多无人机协调控制获得了越来越多学者的关注,并取得了一系列研究成果,如自触发控制[11-14]、动态事件触发控制[15-17]、异步事件触发控制[18-20]等。
在事件驱动的多无人机系统协调控制中,根据事件触发通信方案,将事件触发策略分为集中式事件触发策略[21]和分布式事件触发策略[22]。集中式事件触发策略要求所有无人机共同使用一个事件触发观测器,通过该观测器,所有无人机共享状态信息量。多无人机系统采用集中式事件触发策略时,系统具有较好的控制效果。与时间触发策略相比,事件触发策略可以显著降低无人机之间的通信频率。分布式事件触发策略要求多无人机系统中,每个无人机独立使用事件触发观测器,该观测器只需监测自身无人机及其邻居无人机的状态,并与邻居无人机之间进行状态量的交互。多无人机系统采用分布式事件触发策略时,既能减少无人机之间数据处理压力,又具有良好的鲁棒性和扩展性。
本文研究了一类基于事件触发的多无人机协调控制。针对期望的编队队形,分别提出了集中式和分布式的事件触发控制律。针对两类事件触发控制律,给出了两类设计事件触发时刻序列的算法。同时,理论说明了该算法保证了多无人机系统最终达到期望编队队形,且无人机之间避碰。最后仿真校验了主要理论成果。
1 准备
代数和矩阵理论

(1)

2 问题描述
2.1 系统模型
考虑由n个无人机构成的多无人机系统,单个无人机的动力学模型为
(2)
其中xi∈RN表示第i个无人机的状态向量,ui表示控制律。令r表示无人机的感知半径,多无人机系统期望实现的队形为
(3)


图1 函数φ随θ变化
设计控制律为
(4)


(5)

值得说明的是,上述多无人机系统式(1)使用控制律式(4),需要单个无人机连续监测其感知区域内其他无人机状态。
2.2 事件触发控制
在实际应用中,使用事件触发机制执行控制和采样任务,可以节约通信网络带宽和资源。一般来说,事件触发控制可以分为集中式和分布式事件触发。
集中式事件触发即所有无人机只有一个共同的事件触发观测器,对多无人机系统(1),设计集中式事件触发控制律为
(6)

tk+1=inf{t>tk|f(t)=0}
(7)
其中f(t)是一个由事件触发条件确定的函数,与xi(t)和xi(tk)都有关。
分布式事件触发控制指系统中每个无人机都有各自的事件触发观测器,对多无人机系统式(1),设计分布式事件触发控制律为
(8)
(9)
接下来,对多无人机系统式(1),对上述集中式事件触发控制律式(5)和分布式事件触发控制律式(7)分别设计有效的时间触发序列。
3 事件触发策略设计
在第2节中,对多无人机系统式(1),本文提出了集中式事件触发控制律式(5)和分布式事件触发控制律式(7),接下来,对上述两种控制律,本文考虑如何设计有效的事件触发时刻序列,保证多无人机系统式(1)最终实现期望队形式(2)。
3.1 集中式事件触发策略设计
问题1.考虑多无人机系统式(1)使用控制律式(5),设计事件触发时刻序列{tk}k∈Z+,使得多无人机系统式(1)最终达到期望队形式(2)。
为解决问题1,设计李亚普诺夫函数
(10)
对李亚普诺夫函数L求导,有
(11)

(12)
(13)
设计e满足

(14)
其中,σ∈(0,1),则有
(15)

接下来,设计集中式事件触发控制算法。
定理1.考虑多无人机系统式(1)使用集中式事件触发控制律式(5),设计事件触发时刻序列满足

(16)
即,
tk+1=inf{t>tk|f(x,e,t)=0}
(17)
则多无人机系统最终实现期望队形式(2)。
证. 考虑李亚普诺夫函数
(18)
对任意的时刻t,存在l∈Z≥0,满足t∈[tl,tl+1),则有
(19)
注1.集中式事件触发控制,需要事件触发观测器时刻监测所有无人机状态,通过所有无人机状态计算下一次事件触发时刻,再通过控制器控制所有无人机在下一次事件触发时刻更新状态和控制律。
3.2 分布式事件触发策略设计
为解决问题2,同样设计李亚普诺夫函数
(20)
对李亚普诺夫函数L求导,有

(21)

(22)

(23)
进一步,结合杨氏不等式,有
(24)
其中,a>0。令a∈(0,2),同时令ei满足
(25)
其中,σi满足对任意的t∈(0,+∞),σi∈(0,1),则有李亚普诺夫函数的导数
(26)
接下来,设计集中式事件触发控制算法。
定理2.考虑多无人机系统式(1),使用分布式事件触发控制律式(7),设计事件触发时刻序列满足
(27)
即,
(28)
其中,a>0。令a∈(0,2),则多无人机系统最终实现期望队形式(2)。
证. 考虑李亚普诺夫函数
(29)
对任意的时刻t,有
(30)

(31)
注2.相比于集中式事件触发控制,分布式事件触发控制降低了对事件触发观测器的要求,增强了控制系统的鲁棒性和可扩展性。集中式事件触发控制的优势在于降低了控制器与无人机的通信次数,且集中式事件触发控制部署简单。在实际应用中,可以根据实际情况,灵活使用两种事件触发控制算法。
注3.事件触发控制中的芝诺行为会导致在有限时间内控制条件不断满足,控制器无法有效调整触发。值得说明的是,本文的集中式和分布式事件触发控制算法可以有效避免芝诺现象,相关的芝诺行为排除方法将在接下来的工作中展开。
4 数值实例
下面通过数值实例1和2分别校验上述定理1和定理2的主要理论结果。
4.1 数值实例1


图2 集中式事件触发时刻序列

图3 集中式无人机位置变化
4.2 数值实例2

图4 分布式事件触发时刻序列

图5 分布式无人机位置变化
考虑和数值实例1相同状态的多无人机系统,所有无人机初始状态、系统参数和感知半径如数值实例1。设计系统式(1)使用周期性采样策略,采样周期T=0.001。通过仿真模拟,集中式、分布式事件触发、周期采样的李亚普诺夫函数随时间变化曲线如图8,其中的虚线值为n(n-1)/k2=36,是所有无人机彼此距离不低于r=2时的极限值。周期采样曲线与集中和分布式事件触发控制中李亚普诺夫函数比较,在时间段t=0到t=500s内,周期采样控制中每个无人机与其邻居通信500000次,集中式事件触发控制策略中每个无人机与其邻居无人机通信10次,分布式事件触发控制中,无人机x1,…,x10分别与其邻居无人机通信[85,267,170,140,244,17,450,505,644,125]次,每个无人机平均与其邻居无人机通信264.7次。可以看出,相比于周期性采样,集中式控制策略可以大大减少通信次数,分布式控制策略在减少通信次数的同时,能使系统具有更好的性能。当t=500s时,所有控制方式的多无人机系统都趋于期望队形。
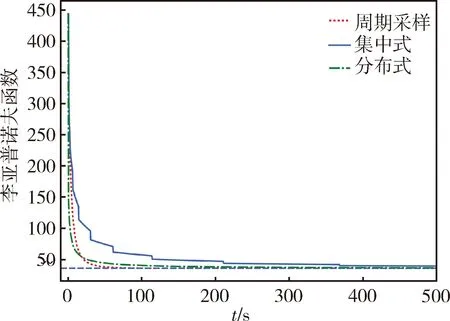
图6 不同控制方式的L随时间变化
5 结论
主要研究了多无人机系统基于事件触发的避碰编队控制问题。(假设所有无人机之间的通信情况仅仅根据传感器传感距离与无人机之间的距离确定,即多无人机系统的通信拓扑是时变的。)首先提出了集中式和分布式两类事件触发控制律。针对集中式事件触发控制律,考虑所有无人机共享状态信息量,给出了一类集中式事件触发控制算法。理论说明了该算法满足所有无人机最终实现期望编队队形,且演化过程避碰。针对分布式事件触发控制律,设计每个无人机独立使用事件触发观测器,考虑所有无人机仅与其邻居共享状态信息量,给出了一类分布式事件触发算法。同时理论说明了该事件触发算法的正确性。最后,数值仿真校验了理论结果的正确性。文中给出的仿真实例说明了该方法的有效性。
