卫星姿控多推力器高速率阻尼算法及验证
2022-11-03袁彦红王北超范蕾懿梁巨平
袁彦红 王北超 范蕾懿 查 理 范 勇 梁巨平 李 爽
1. 南京航空航天大学航天学院,南京 211106 2. 上海航天控制技术研究所,上海 201109
0 引言
以喷气推力器为执行机构的姿态控制系统是一种典型的主动式零动量控制系统,具有快速、方便等特点[1]。为了保证卫星的简单、可靠、重量轻和低成本特性,推力器的选取和安装变得愈发重要,在满足功能需求的情况下尽可能采用少的推力器。卫星初始入轨阶段卫星姿态控制系统的任务包括速度阻尼、太阳和地球捕获等[2]。如果卫星能源充足,有足够时间建立稳定对日状态,可以采用磁阻尼方式。当要求卫星快速建立稳定状态时,采用推力器喷气控制是一种很好的选择。采用多个推力器可以更好地实现姿态控制[3]。某近地小卫星采用推力器控制方案,共安装4台推力器,用于初始入轨姿态控制,轨道控制,飞轮卸载等任务。鉴于测控弧段影响,要求在星箭分离后和出境前该卫星尽快完成速率阻尼、帆板展开等在轨程序作业。要求姿控系统在星箭分离后的10s内完成速率阻尼。
因该卫星仅安装4个推力器,星体Xb,Yb和Zb轴方向上的姿态控制推力器会出现功能上的复合使用,每个推力器对多轴产生控制力矩。针对此类问题,卫星姿态控制一般都是解耦的,本文提出将三轴解耦和推力耦合速率阻尼两种算法用于该卫星的姿态控制,并利用半物理实时仿真证明了两种算法的可行性,对耦合算法与一般解耦控制算法进行了比较,比较结果可知耦合算法的控制效果更优。
1 卫星姿态动力学数学模型
由四元数表征的运动学微分方程为[4-5]
(1)
可简写为
(2)
定义卫星转动角动量
H=Jω
(3)
其中,J为表示卫星惯性特征的惯量矩阵,其形式为
(4)
矩阵中对角线元素为卫星绕星体坐标轴的转动惯量,其它元素为惯量积。则卫星姿态动力学方程表示为[6-7]
(5)
其中,Tc为喷气控制力矩,Td为干扰力矩。由于喷气控制力矩远比干扰力矩大,故Td取0Nm。
2 推力器控制方案
某卫星共配置4台5N单组元推力器。4台推力器均安装在卫星-Zb面内,推力方向均在YbObZb面内,均往远离星体-Zb轴偏离相同角度,推力器安装位置及方向如图1所示。4台推力器卫星三轴姿态控制功能分配如表1所示。

图1 推力器安装方案

表1 推力器功能分配
3 速率阻尼控制算法设计
星体三轴角速度解耦控制的过程比较简单,出现的控制结果更易于理解和分析,而三轴角速度耦合的姿态控制相对比较复杂,现分别对角速度解耦控制和耦合控制两种算法展开设计。
3.1 推力解耦控制算法
卫星一阶频率比较高,且速率阻尼时帆板未展开,考虑卫星为刚体,依旧采用较为常见的PD控制器[8]:
Tc=-Kpe-Kdω
(6)
其中,e为三轴姿态偏差,ω为三轴角速度偏差,Tc为控制力矩指令;Kp为比例系数矩阵,Kd为微分项系数矩阵。分别对三轴进行控制力矩指令计算,得到:
Tc=[TxTyTz]T
(7)
Tx,Ty和Tz分别为三轴推力器组合输出的力矩。在卫星姿态控制系统周期内,确定三轴期望冲量,可由式(8)计算。
Ic=Tc·Ton_max
(8)
其中,Ton_max取控制周期:Ton_max=500ms。
再根据推力器组合实际输出力矩:
(9)
得到:
ton=[tx_onty_ontz_on]T
(10)
推力器喷气具有死区特性,即对某最小脉宽不响应,不能喷出燃料,产生控制推力,该推力器最小脉宽取20ms,对每组推力器均取2个脉冲宽度大于20ms的一组,tx_on,ty_on和tz_on输出给对应的推力器进行喷气脉宽输出。由于计算机控制周期为0.5s。每个控制周期内只能输出一组,每次取tx_on,ty_on和tz_on中最大脉宽进行输出,每次输出的是2个推力器脉宽,且脉宽时间相同,达到了三轴姿态控制解耦目的。
3.2 推力耦合控制算法设计
用于姿态控制的4台推力器中最多有3台可以同时工作,有A1-A2-A3、A1-A2-A4、A1-A3-A4和A2-A3-A4四种推力器组合方式,根据推力器的安装参数,分别计算推力器脉宽,选择其中时间均大于0的组合送给推力器。
依旧采用PD控制器同式(6)~(8)所示。而推力器脉宽计算采用不同的方法。4台姿控推力器的力矩矩阵表示为:
(11)
下面给出三轴指令力矩与推力器脉冲宽度的关系。
1)A1-A2-A3推力器组合:
(12)

2)A1-A2-A4推力器组合
(13)

3)A1-A3-A4推力器组合
(14)

4)A2-A3-A4推力器组合
(15)

推力器脉冲宽度只能为正,选择4组中输出的3个脉冲宽度全部非负的一组,作为推力器脉冲指令,在输出前进行脉冲宽度等比例限幅。同样考虑推力器的最小脉宽和最大脉宽为:
Ton_min=20ms,Ton_max=500ms
4 半物理仿真验证
4.1 半物理仿真验证研究
卫星姿态控制系统半物理仿真是在数学仿真的基础上,将数学仿真中的某些关键模块如星载计算机、星敏感器、太阳敏感器和陀螺等用实物代替,其他模块用仿真软件建立数学模型[9]。将上述数学模型编译加载到实时仿真机,将星载计算机及星上姿控产品或产品接口模拟板接入半物理闭环仿真系统。
半物理仿真系统对姿态控制系统中的一些关键技术进行演示及验证[10]。半实物仿真既不失仿真的可靠性,还能降低仿真成本,缩短仿真周期[11-14]。
根据该卫星姿轨控系统产品配置,以地面的实时仿真系统为核心,卫星姿态动力学仿真机对敏感器进行激励,控制器(星载计算机及星载软件)产生控制指令,驱动推力器喷气,动力学仿真机再采集喷气作用力以形成闭环系统[15]。如图2所示。

图2 卫星姿轨控半物理仿真系统
4.2 仿真参数
星体转动惯量为:

速率阻尼目的是使星体角速度快速控制到0,对姿态角没有要求,仅对星体角速度进行控制[16],故kp取0。PD控制器参数为:

表2 PD控制器参数
4台推力器均安装在卫星-Zb面内,推力方向均在YbObZb面内,均往远离星体-Zb轴偏离15° (图1),则4台推力器的推力分量矩阵为:

(16)
推力器的安装位置及方向如表3所示。

表3 推力器仿真参数
α,β和γ分别为推力器喷管与星体Xb,Yb和Zb轴之间的夹角。由卫星本体质心坐标、推力器安装坐标及推力方向,可得推力器组合对星体产生的三轴力矩如表4所示。

表4 推力器姿态控制力矩
速率阻尼的初始角速度分别为ωbx=1.8(°)/s,ωby=-1.8(°)/s,ωbz=1.8(°)/s;计算机的控制周期为500ms。
4.3 半物理试验验证结果
4.3.1 推力解耦控制算法半物理仿真结果
通过三轴解耦控制算法,半物理仿真星体角速度变化如图3 所示,每控制周期推力器喷气情况如图4所示。

图3 解耦控制星体角速度变化
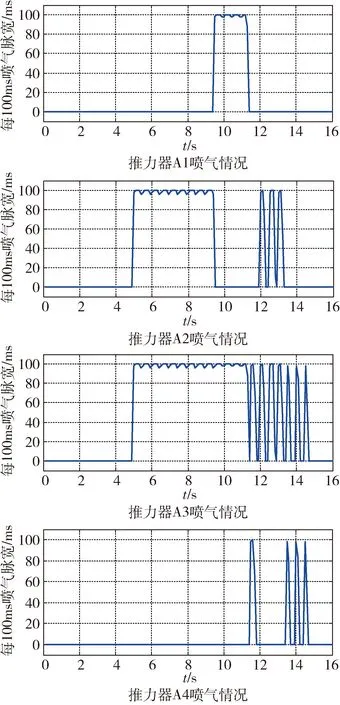
图4 解耦控制推力器喷气情况
仿真结果表明,速率阻尼每次均为2台推力器同时工作,且速率阻尼前期由于星体角速度比较大,每组推力器几乎都是连续喷气工作,每次仅控制星体一个轴,每控制周期的喷气脉宽逐渐减少,不会对另外两个星体轴产生干扰耦合力矩,角速度每个轴依次减小。实现了解耦控制的目的,星体角速度得到了有效控制。
4.3.2 推力耦合控制算法半物理仿真结果
推力耦合情况下,根据星体三轴实际角速度,控制器输出的脉宽可能是1台、2台或3台,每周期根据控制器的实际脉宽,驱动推力器工作。星体三轴角速度同时开始阻尼,速率阻尼星体角速度变化如图5所示,半物理实时仿真机每0.1s采集到推力器实际脉宽如图6所示。

图5 推力器耦合控制星体角速度变化

图6 耦合控制推力器喷气情况
根据上图可知,三轴角速度耦合,可能只有一个推力器脉宽大于20ms,可以有效减少推力器死区对控制系统的影响,星体三轴角速度同时开始阻尼。在推力耦合控制算法下,星体角速度得到有效控制。
4.3.3 仿真结果比对分析
对仿真数据进行统计与比对。速率阻尼角最终速度精度、喷气总燃耗和速率阻尼过程消耗时间结果如表5所示。

表5 仿真结果比对
经比对发现,耦合控制算法速率阻尼精度更高,燃料消耗更少,历时更短,因此耦合控制算法速率阻尼更加有效。
5 结论
针对卫星安装推力器数量较少且存在功能复合使用的情况下,提出了一种解耦控制方法,在每个控制周期内,仅对卫星的一个轴进行姿态控制,该方法更加直观、简单。同时,也设计了耦合情况下的速率阻尼控制算法,根据当前三轴姿态角速度,解算推力器喷气脉宽和,对三轴同时阻尼。对解耦和耦合控制算法进行了半物理仿真验证,验证了两种算法的有效性,其中耦合控制算法效果更优。这是耦合算法和解耦算法在卫星姿态控制速率阻尼上面的应用,也可以应用到卫星三轴长期喷气稳定控制工况下,耦合算法是三轴控制之和,控制量小时,可单个推力器工作,最小喷气冲量减小一半,有助于减少推力器最小工作脉宽对卫星喷气姿态控制的精度影响,提高推力器喷气控制的姿态稳定度。
