一种平台惯导系统射前一体化标定方法
2022-11-03徐军辉姚志成徐东辉
徐军辉 姚志成 徐东辉 单 斌
火箭军工程大学,西安 710025
0 引言
惯导系统是导弹武器制导系统的核心部件,直接决定着导弹武器的命中精度。导弹发射前必须对惯导系统性能进行测试,标定误差系数,用于误差补偿,确保惯导系统使用精度能够满足作战应用需求。传统惯导系统测试是在实验室条件下进行的,需要依赖昂贵的地面测试设备和固定的测试环境。尽管测试项目全,测试精度高,但是无法满足导弹武器机动性、灵活性的需求。在复杂的战场环境中还会限制导弹武器的生存能力和快速反应能力。无依托发射已经成为导弹武器新型的作战模式,对惯导系统的测试标定也提出了新的要求,惯导系统自标定、自对准技术得到了应用。文献[1]表明惯导系统自标定依赖于自对准提供的方位角;文献[2]研究表明航向效应对陀螺仪零次项的影响比较显著。文献[3]表明自对准技术的实现受到航向效应的影响。文献[4]提供了一种浮球式惯性平台连续翻滚自标定自对准方法。以上分析表明:自标定、自对准和航向效应之间存在交叉耦合影响,特别是航向效应会直接影响自对准精度。本文提出一种平台惯导系统射前一体化标定方法,研究如何利用导弹发射前有限的时间和信息实现惯导系统自标定、自对准一体化技术,并通过航向效应补偿提高自对准、自标定精度。使这三者优势互补,在相互实现的同时,又减少彼此之间的交叉耦合误差,既能满足导弹武器的机动灵活发射需求,又可提高导弹的命中精度。
1 平台惯导系统自标定、自对准误差模型
平台式惯导系统主要由陀螺仪和加速度计组成。平台台体相对于惯性空间的微小角运动,就是平台的漂移。平台惯性系统中,平台的漂移是由陀螺仪的漂移引起的,因此陀螺仪的漂移大小决定了平台漂移的大小。
1.1 陀螺仪静态误差模型
平台系统中,单自由度陀螺仪的静态漂移误差模型[1]为式(1):
(1)
式中,ωdx,ωdy,ωdz为X,Y和Z陀螺仪的漂移;DFx,DFy,DFz为零次项误差系数;D1x,D2x,D3x、D1y,D2y,D3y、D1z,D2z,D3z为陀螺仪一次项误差系数。
1.2 陀螺仪射前自标定静态误差模型
自标定、自对准中陀螺仪的漂移一般通过采用平台框架轴上姿态角传感器的输出获得。虽然陀螺仪不直接敏感地速,但是地速会通过弹体传递到平台基座上,影响姿态角传感器的输出。因此射前自标定、自对准时的陀螺仪通道静态输出误差模型如式(2)所示:
(2)
式中,ωepx、ωepy和ωepz为地速分量在平台坐标系三个轴上的投影。
1.3 陀螺仪射前自对准静态误差模型
当导弹航向发生变化时,平台的壳体会随着弹体运动,而台体稳定在惯性空间,因而壳体和台体之间会产生相对运动,把这部分在航向发生变化时,由于壳体和台体之间相对运动而造成的漂移称为航向漂移。把由航向变化而引起航向漂移的这种现象称为航向效应[2]。射前自对准时需要大范围转动平台台体,平台壳体固连于弹体,平台台体与壳体之间产生相对运动,必然会引入航向效应的影响。因此自对准时陀螺仪通道的误差模型为式(3):
(3)
式中,Hx,Hy和Hz为航向漂移,单位为(°)/h。
1.4 加速度计射前自标定静态误差模型
平台系统中,加速度计的数学模型可以描述为式(4):
(4)
式中,ax,ay,az为沿X,Y和Z三个通道加速度计的输出;Ax,Ay和Az为沿X,Y和Z轴的加速度;K0x,K0y,K0z为加速度计零次项误差系数;K1x,K1y,K1z为加速度计标度因数。
2 平台惯导系统射前自对准及航向效应影响分析
导弹发射前需要确定平台坐标系与发射坐标系的初始关系,称为惯导系统的初始对准。一般分为两步:一是调平;二是方位对准。如果完全依靠惯导系统自身性能实现初始对准,称为惯导系统自对准。本节讨论平台惯导系统的射前自对准技术以及航向效应对自对准精度的影响问题。
2.1 二位置射前自对准方案
为讨论问题的方便,取发射坐标系与地理坐标系重合。传统自对准方案一般利用一个方位对准陀螺仪(方位对准陀螺仪精度要求高一些),采用3位置或4位置方案来实现射前自对准。考虑到无依托发射中对时间的要求,本文利用2个方位对准陀螺仪,采用2位置方案,实现惯导系统射前自对准。惯导系统初始位置如图1所示。
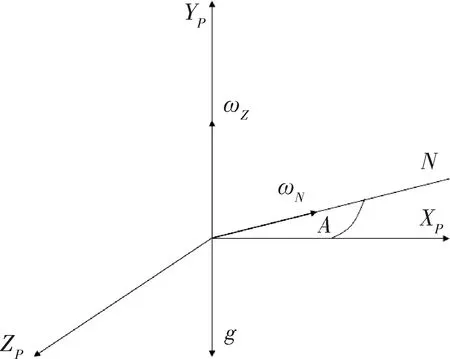
图1 惯导系统初始位置(自对准1位置)
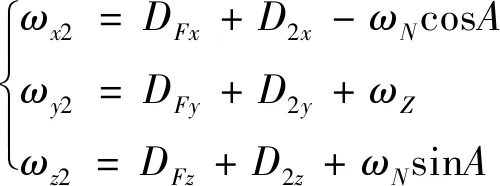
图1中,P系为平台坐标系,A为方位角,此时为调平结束状态。利用平台惯导系统的X和Z陀螺实现射前自对准。使平台绕Yp轴正向转动180°,如图2所示。
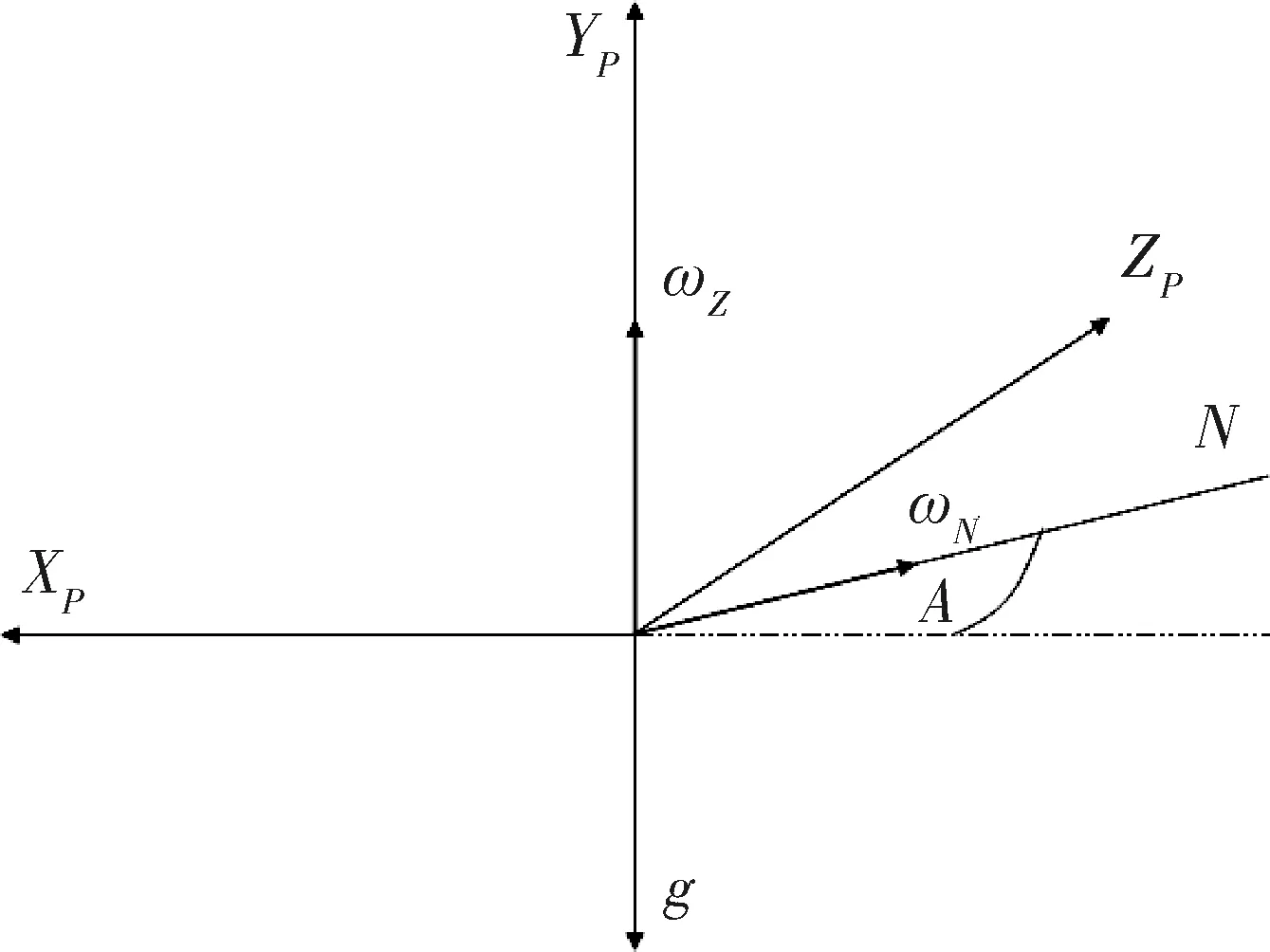
图2 自对准2位置
2.2 自对准参数解算
为分析问题方便,这里先不考虑航向效应的影响。通过1位置、2位置可求解出方位角A。根据陀螺仪射前自对准静态误差模型,可得1位置、2位置陀螺仪输出方程如式(5)~(6)所示。
(5)
(6)
按照式(5)~(6),利用X和Z陀螺仪在2个位置的输出可得方位角为式(7):
(7)
这是将陀螺仪的零次项误差系数当做常值,没有考虑航向效应漂移的结果。由于方位对准时,沿方位轴转动了,所以必然存在航向效应,所以需要讨论航向效应对自对准精度的影响。
2.3 航向效应影响分析
无论是在对准和标定过程中,都存在大范围转动,必然引入航向效应的影响。航向效应的影响机理到目前为止都没用定论。文献[2]和[5]是通过实验的角度研究航向效应。文献[6]研究了基于温度变化的Fourier 展开的惯导航向效应补偿方法。由于航向效应对弹道导弹制导计算影响不大,所以有效的研究比较少。考虑航向效应的影响,按照式(3),(5)和(6)可改写为:
(8)
(9)
按照式(8)~(9),利用X和Z陀螺仪在2个位置的输出可得方位角为:
(10)
式(10)表明航向漂移会影响平台惯导系统自对准精度。文献[2]表明航向漂移的影响可超过0.2(°)/h,对自对准的精度影响很大,不能忽略,要保证自对准、自标定精度,就必须考虑航向效应的影响。
3 平台惯导系统射前一体化标定方案
对于机动发射的地地弹道导弹,自标定与自对准的精度与快速性同等重要,而且还要考虑消除航向效应的影响,必须精心设计自标定与自对准方案,才能同时满足精度和时间要求。由于自标定与自对准允许占用时间较短,只能选择非常有限的几个位置完成自标定与自对准功能。根据陀螺仪和加速度计的自标定误差模型,在选择标定与自对准位置时,必须使所选位置能充分激励被标定系数,而且要尽量避免不标定系数的影响。由式(2)可见,除常值漂移项外,陀螺仪其它漂移都与加速度有关。因此,使平台坐标系其中两轴基本水平,可以减少陀螺仪误差模型中的误差项,简化标定过程。对于加速度计的标定,当平台其中两轴基本水平时,垂直轴向加速度计的模型也非常简单。因此选择使平台其中两轴基本水平,且使水平误差尽量小对提高陀螺仪和加速度计参数的标定精度和方位自对准精度都有重要意义。
3.1 自标定与自对准位置机械编排
传统射前对准和标定是分开进行的,因为解算标定误差系数时要用到方位角,故一般先进行对准,后进行标定。由于机动发射导弹要求发射准备时间短,因此允许自标定与自对准占用时间也非常短。综合考虑快速性与自标定和自对准方案的完善性,设计了7位置自对准、自标定、航向效应补偿的一体化方案。惯导系统初始位置如图3所示。
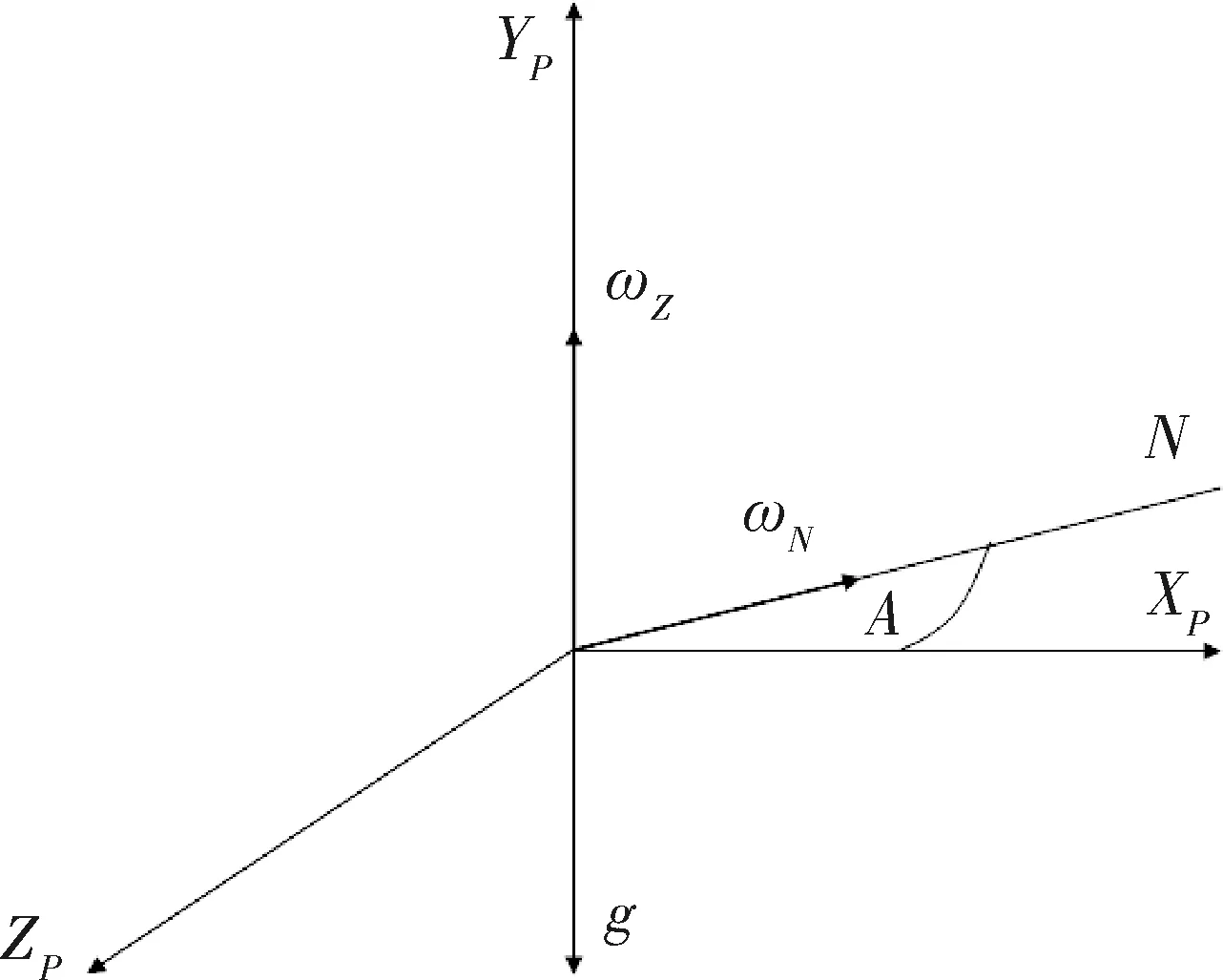
图3 一体化标定方案初始位置(1位置)
平台处于调平状态,初始方位角为A,为保证标定精度,一般取45°左右。自对准、自标定用到的激励为当地重力加速度g以及地速分量,其中地速分量的表达式如式(11)所示:
(11)
式中,ωie为地速;φ为当地纬度;ωN为地速北向分量;ωZ为地速垂直分量。
位置变换一般遵循3个原则:共用性原则、遍历性原则和单向性原则。共用性原则要求自对准和自标定尽可能选取共同的位置,一般将自对准融入到自标定中考虑。遍历性原则要求转位控制要满足每个误差系数激励的要求。单向性原则要求,转位要避免重复的过渡位置出现。另外,一般三轴平台为避免出现“框架自锁”现象,绕内环轴的转动是受限的,不能通过绕内环轴转动提供激励。综合考虑以上因素,自对准、自标定一体化方案的位置选择及位置转换顺序如图4所示。
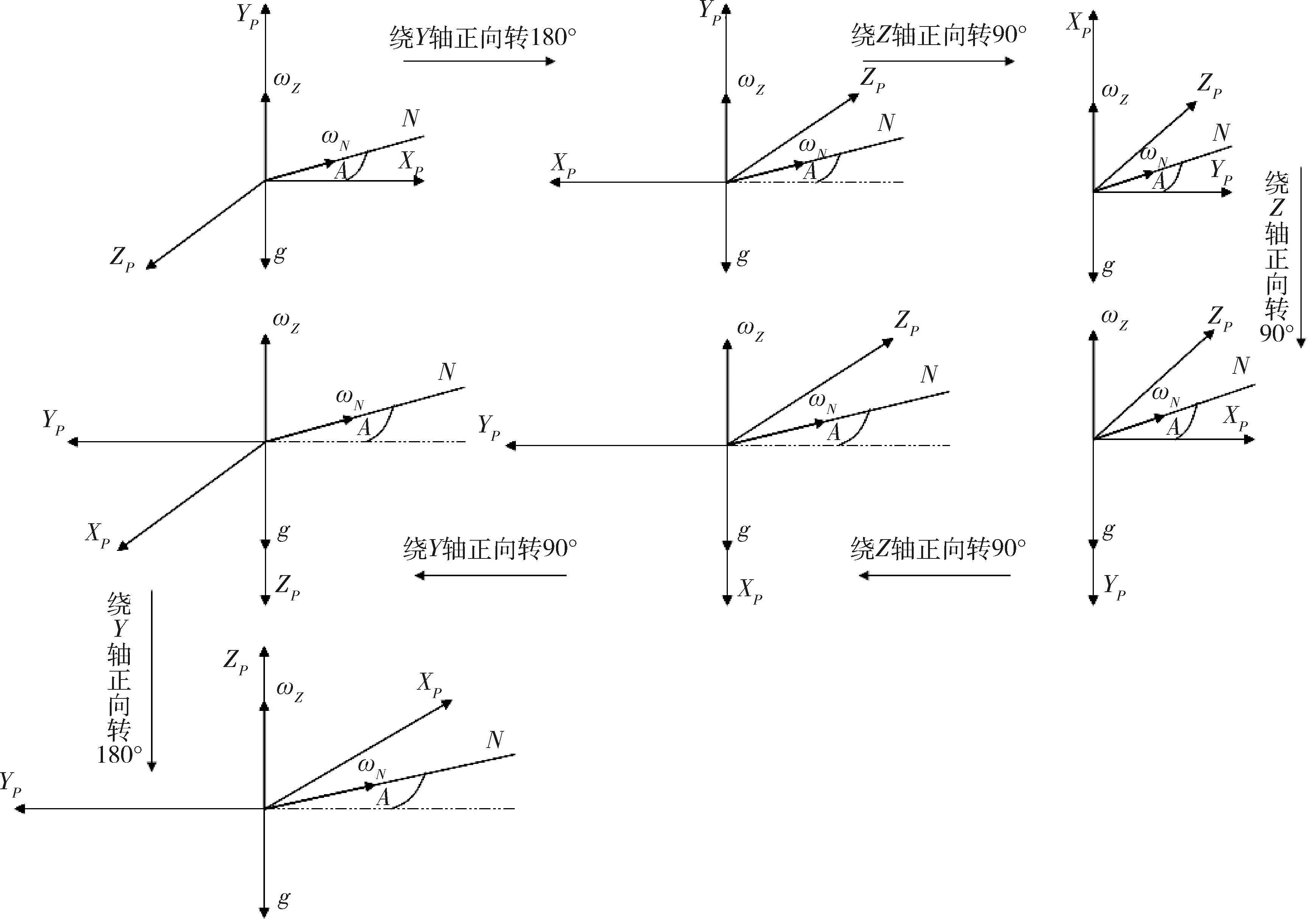
图4 自标定与自对准位置选择及位置转换顺序机械编排
自对准一般至少需要2个位置。自标定一般需要9个位置[1]。采用一体化方案可减少4个位置,节省30min时间。
3.2 自标定参数解算
1)陀螺仪误差系数解算
利用1位置、2位置和4位置,可分离陀螺仪误差系数:DFx,DFy,DFz,D2x,D2y,D2z,如式(12)和(13)所示。
(12)
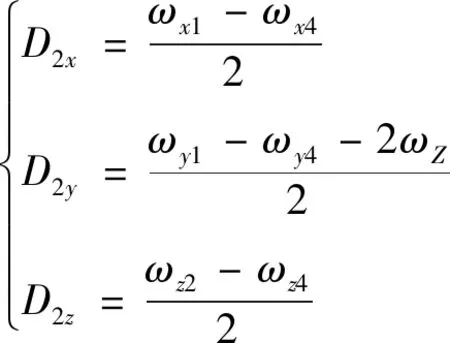
(13)
利用3位置和5位置,可分离陀螺仪误差系数:D1x,D1y,D1z,如式(14)所示。
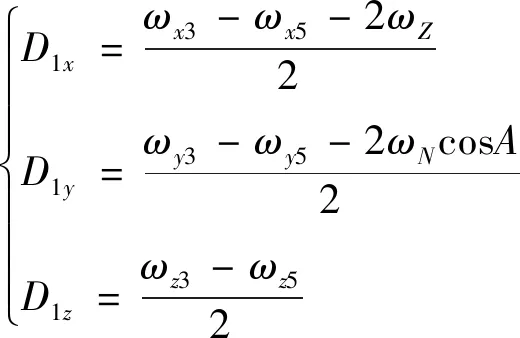
(14)
利用6位置和7位置,可分离陀螺仪误差系数:D3x,D3y,D3z,如式(15)所示。
(15)
2)加速度计误差系数解算
根据加速度计输出误差模型,利用3位置和5位置可以解算出X加速度计的误差系数,如式(16)所示。
(16)
利用1位置和4位置可以解算出Y加速度计的误差系数,如式(17)所示。
(17)
利用6位置和7位置可以解算出Z加速度计的误差系数,如式(18)所示。
(18)
3.3 自标定、自对准、航向效应标定参数解算的迭代算法
1)初值计算
利用1位置、2位置可求解出航向效应漂移系数。1位置和2位置陀螺仪通道输出误差模型如式(8)和式(9)所示。令Hx1,Hz1,Hx2,Hz2的初值为0,则由式(10)可得:
(19)
其中,A为没有考虑航向效应的方位角。
2)迭代算法
式(10)表明,航向效应标定与方位角计算互相耦合,计算航向效应漂移需要知道方位角和陀螺仪误差系数,计算方位角需要知道航向效应。为解决此问题,本文采用迭代算法,步骤如下:
第1步:将式(19)计算结果代入式(8)和(9),计算1、2位置航向效应漂移Hx1,Hz1,Hx2,Hz2;
(20)
(21)
这里DFx,DFz用式(12)计算结果,D2x,D2z用式(13)计算结果;
第2步:将式(20)和(21)计算结果Hx1,Hz1,Hx2,Hz2重新代入式(10)计算方位角A;
第3步:计算更新式(14)、(15)中包含方位角的误差系数;
重复第1步、第2步和第3步,依次往复。一般迭代3~5次,即可满足精度要求。
4 实例分析
利用三轴转台验证本文提出的一体化标定方案。第1步三轴转台调平;第2步三轴转台对准北向;第3步将平台安装在转台上,让棱镜方向与北向重合,即初始方位角为0;第4步采用传统9位置标定方案进行自标定;第5步,恢复到第3步结束状态,按图2所示机械编排控制平台台体转动,进行一体化自标定转位控制。不考虑航向效应补偿时的自对准结果为185.6″,而一体化自对准结果为33.2″。自对准精度有显著提高。表明航向效应对平台惯导系统自对准精度影响是比较显著的,通过航向效应补偿技术可以有效提高平台惯导系统自对准精度。一体化标定结果如表1所示。表1中对不考虑航向效应影响条件下的平台惯导系统自标定结果和采用一体化标定方案获得自标定结果进行了对比分析。从表1可以看出在不考虑航向效应对自对准精度影响的情况下解算的陀螺仪误差系数出现了超差(DFY,D1Y和D3X)(说明:航向效应对加速度计没影响。)。分析结果表明,采用一体化标定技术,在减少标定位置的基础上,完全可以保证自标定的精度。因此,本文提出的一体化标定方案可以满足平台惯导系统射前自对准、自标定要求,而且可有效缩短作战准备时间。
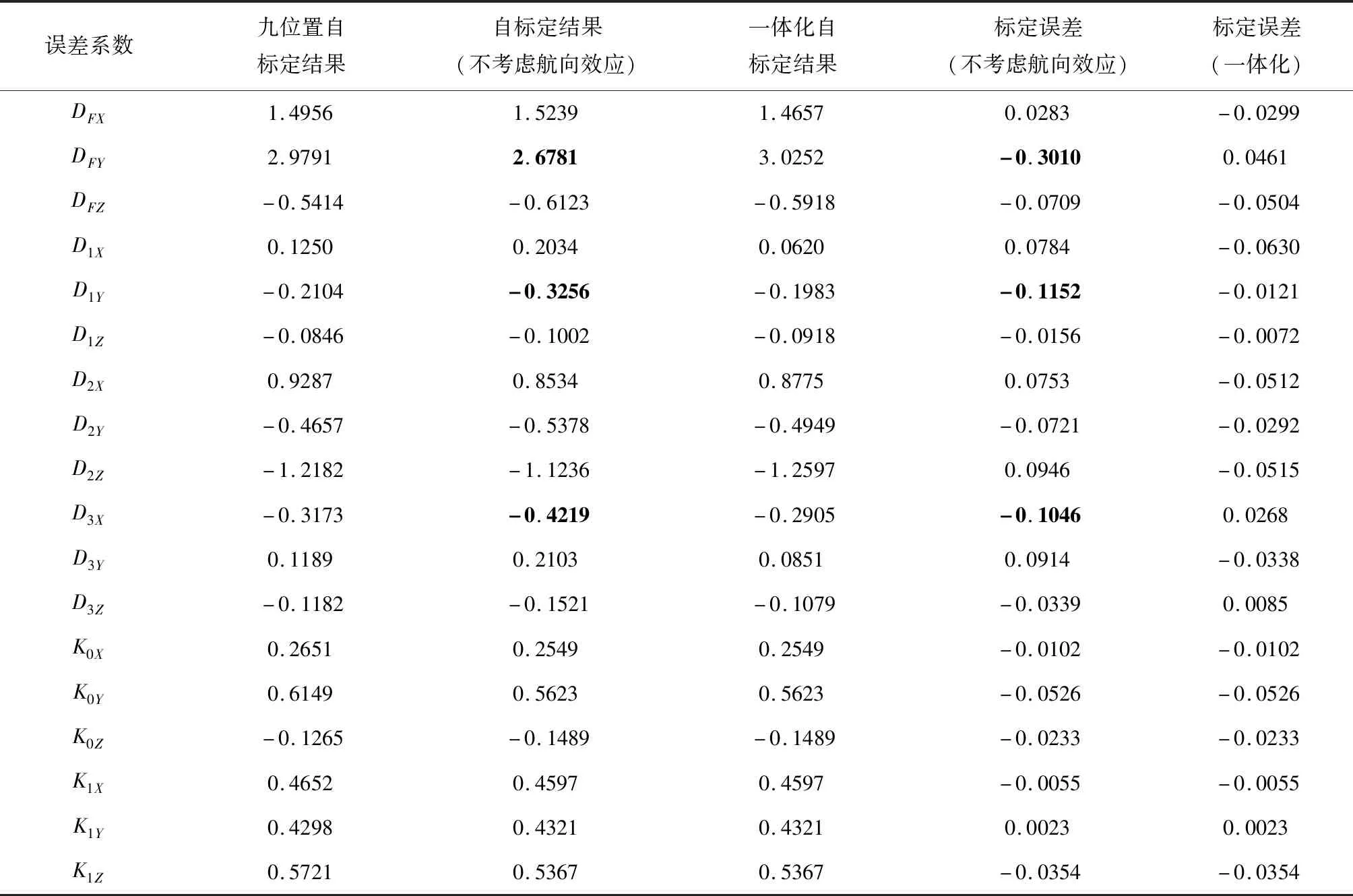
表1 误差系数自标定结果
5 结论
本文提出一种平台惯导系统射前一体化标定方法,充分利用导弹发射前有限的时间和信息实现惯导系统自标定、自对准一体化标定,并通过航向效应补偿提高自对准、自标定精度。实例分析结果表明,本文提出的一体化标定方案,可以使这三者优势互补,在相互实现的同时,又减少彼此之间的交叉耦合误差,既能满足导弹武器的机动灵活发射需求,又可提高导弹的命中精度,并且能够有效减少作战准备时间,提高导弹武器地面生存能力。
