再入飞行器模糊逻辑速度控制方法
2022-11-03刘运鹏李文施健峰王长江朱晓蕾
刘运鹏李 文施健峰王长江朱晓蕾
1. 北京航天自动控制研究所,北京 100854 2. 中国人民解放军96901部队26分队,北京 100094
0 引言
随着高超声速飞行器技术的发展,打击精度以及速度控制精度高成为未来各方关注的焦点。尤其是再入飞行器在突破了力热等约束,实现宽域大机动飞行后,使得再入飞行器飞行航程可从一二百公里到上千公里。不同航程的飞行过程存在巨大差异,为了确保打击效果,对飞行器终端的约束如精度、速度、倾角等提出了很高要求[1-3]。为了提高终端的控制速度精度,传统方法一般需要离线设计减速相关参数,如减速的开始和结束时间点、减速的系数等。但飞行过程的巨大差异(如航程、时间、高度)、偏差的不确定性(如气动参数、大气、结构)等,使得控制方案设计复杂,且偏差适应性较差,很难达到很好的控制效果[4-6]。针对这些问题,有文献提出了设计理想运动轨迹,将速度控制问题转化为虚拟目标追踪导引的问题,形成了基于跳跃机动的速度控制方法该方法对于虚拟目标以及理想运动轨迹的设计要求较高;有文献将模糊逻辑系统应用于再入预测制导。该方法实时性好、落点精度高以及抗干扰能力强,体现了模糊逻辑系统的优点。考虑到模糊逻辑系统的这一优势,可以将该方法应用于速度控制。从目前的研究看,尚未有文献将模糊逻辑系统与速度控制相结合。
为此,本文在分析了再入飞行器终端速度、飞行器与目标剩余飞行距离以及控制量角度之间的模糊关系后,采用基于模糊逻辑的速度控制方法,设计了模糊逻辑系统,确定了系统的控制量和输出量,并根据专家经验制定了模糊规则。通过数学仿真对设计结果进行了验证与分析,结果表明,本文设计的方法在再入飞行器宽域飞行下,具有较高的速度控制精度。
1 再入飞行器弹道模型
作为研究对象的再入机动飞行器与目标的关系示意图如图1所示。将地球视为不旋转的圆球,故目标坐标系为惯性坐标系[7-8]。
由于再入飞行器飞行过程不存在动力只有气动力,在三自由度弹道仿真中,设速度坐标系与半速度坐标系重合,可以得到质心运动方程如下:
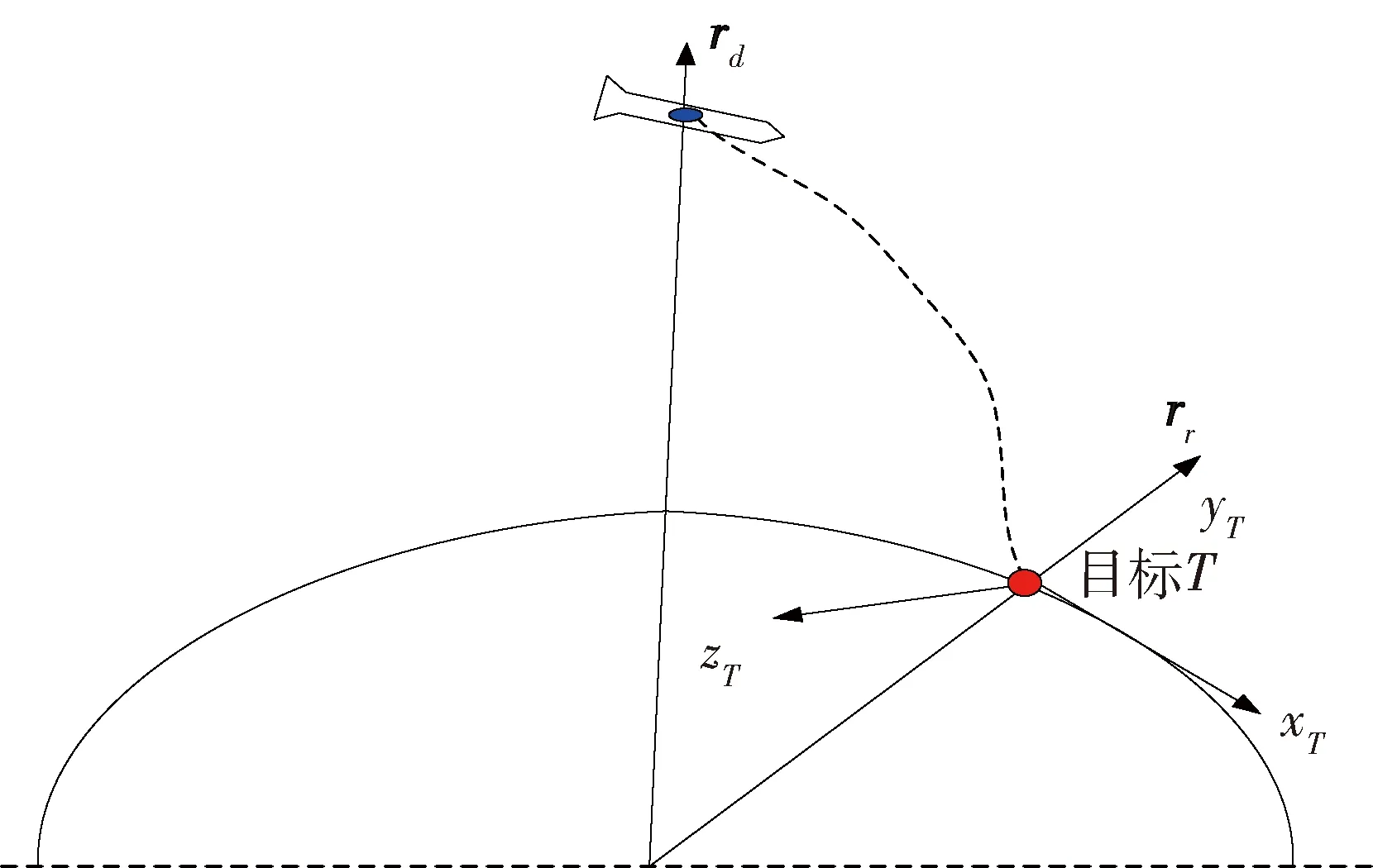
图1 飞行器与目标的关系示意图
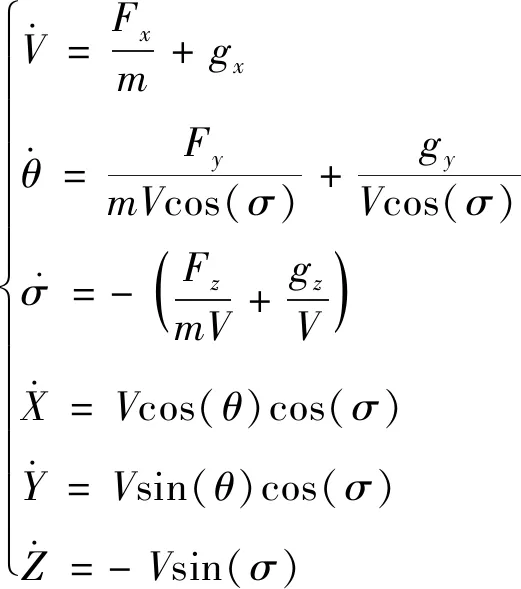
(1)
式中,V为飞行速度,θ,σ为航迹倾角和偏角,m为飞行器质量,gx,gy,gz为引力加速度,Fx,Fy,Fz为再入飞行器受到的气动力。气动力的定义为:
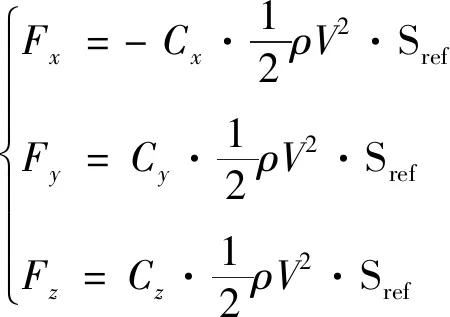
(2)
其中:ρ为大气密度,Sref为气动参考面积,Cx,Cy,Cz为纵向、法向以及横向气动系数。
2 模糊逻辑速度控制方法
模糊控制基本原理:
模糊逻辑控制方法是先将专家经验等先验信息制定成模糊规则,形成数据库和规则库,将实时信号模糊化,再将模糊化后的信号作为模糊规则的输入,完成模糊逻辑的推理,得到推理后的输出,最终作用到被控对象[9-10],基本原理如图2所示。
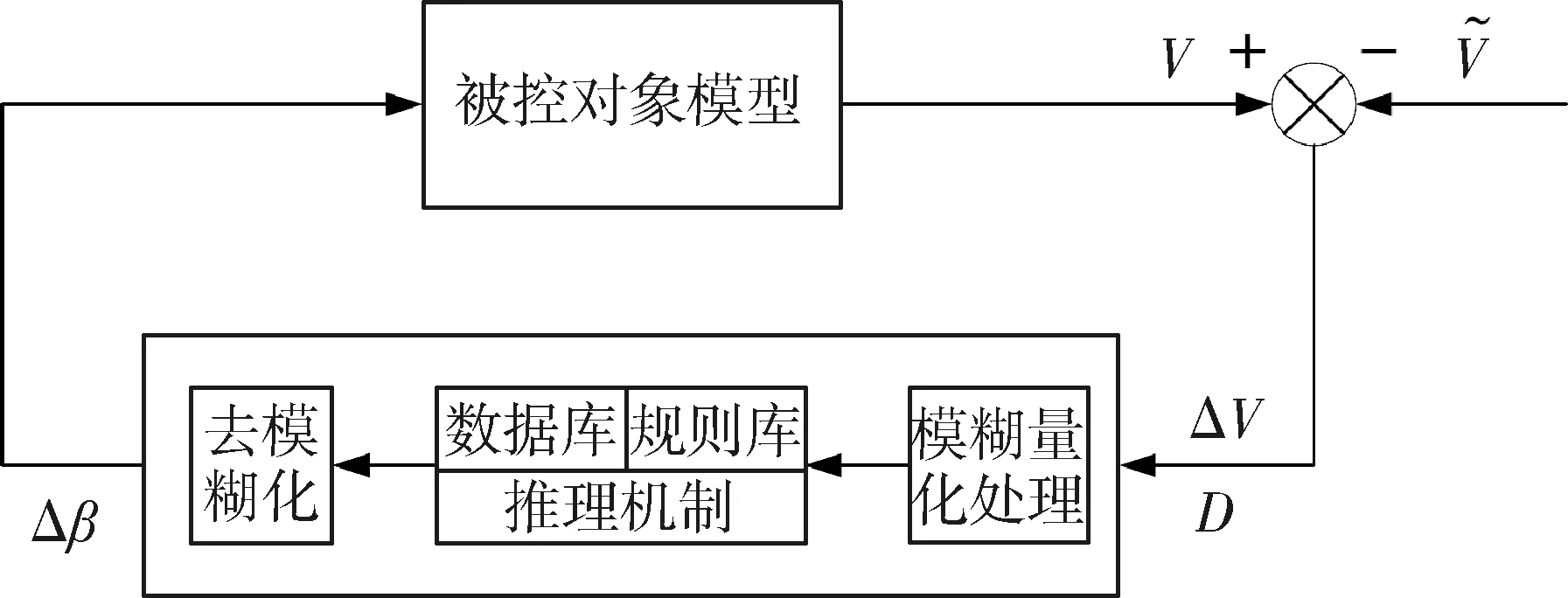
图2 模糊控制基本原理
其中,模糊逻辑规则有一系列关系词连接而成,如if-then、also等,这些关系词必须经过翻译才能够将模糊规则数值化。
考虑终端速度约束条件下的弹道控制,需要考虑距离目标点的距离以及飞行器控制量角度的变化,通过调整飞行器姿态变化达到速度控制的目的,而控制量角度调整的幅度与距离目标点的距离以及预测终端的速度有关,因此可以建立以下关系:
Δβ=f(ΔV,D)
(3)
其中,D为飞行器距离目标点距离,ΔV为速度偏差,Δβ为控制量角度。
基于模糊逻辑的速度控制方法,即利用模糊逻辑系统Δβ、ΔV和D这三者的模糊关系,通过ΔV和D的反馈,进行Δβ的调整。在飞行某一时刻,当预测飞行的终端速度比标准速度大(ΔV>0),且距离目标的的距离较近,则需要调整较大的Δβ值,否则需要减小Δβ值,如此反复计算,可以使得预测的终端速度始终能在标准的速度附近,达到准确的控制速度的目的。流程如图3所示:
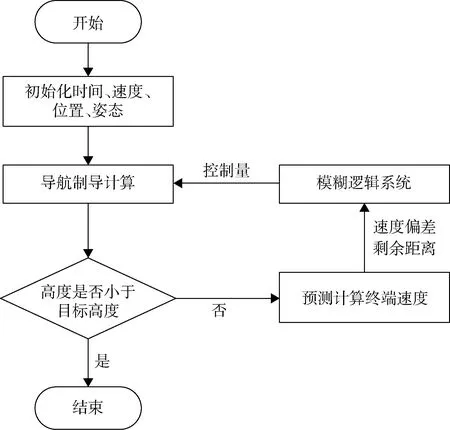
图3 模糊逻辑控制流程

3 模糊逻辑系统设计
根据上述描述可知,模糊逻辑系统的设计包括控制量与输出量的设计、输入量与输出量的模糊化、模糊规则的制定等[11]。
控制量与输出量的设计:
控制量选为:
(4)
输出量选为:u=Δβ

输入量与输出量的模糊化:
将输入量E1设计了6个模糊子集,记为{ZO,PS,PM,PL,PXL,PXL2,PXL3},根据E1的变化确定范围{0,10,25,50,100,200,300};
将输入量E2设计了4个模糊子集,记作{ZO,DS,DM,DL,DXL},根据E2的变化确定范围{0,15,30,40,50};
根据输入变量E1和E2的模糊化子集可知,输出变量Δβ有24个点,其数值的选取可根据专家经验确定。在选取过程中,简单直观的可以理解为:E1越大,Δβ越大;E2越小,Δβ越大。但实际需要考虑飞行器本身的机动能力、设计约束条件等。
模糊规则的制定:
前文描述了模糊逻辑关系词,本文采用的是if-then规则,即“ifE1=PM且E2=DM, then Δβ=5°”。
设计的模糊逻辑规则如表1所示:
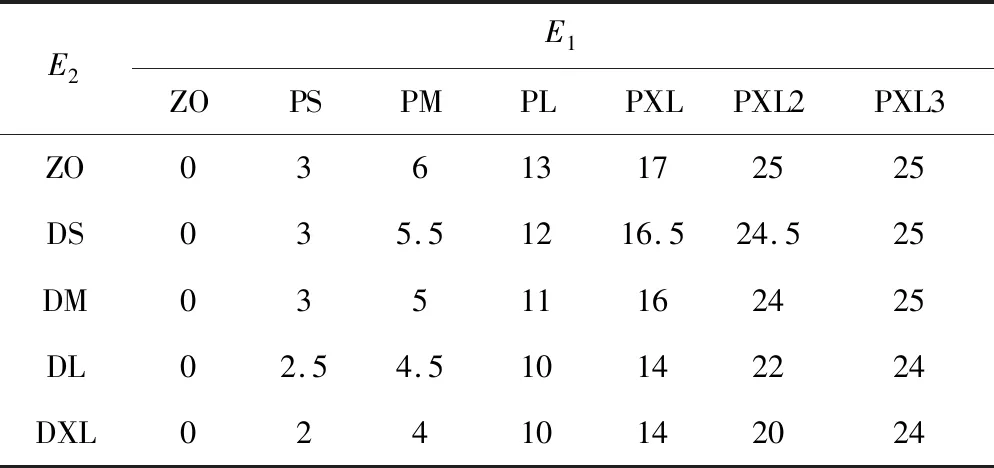
表1 模糊逻辑规则表
4 仿真与分析

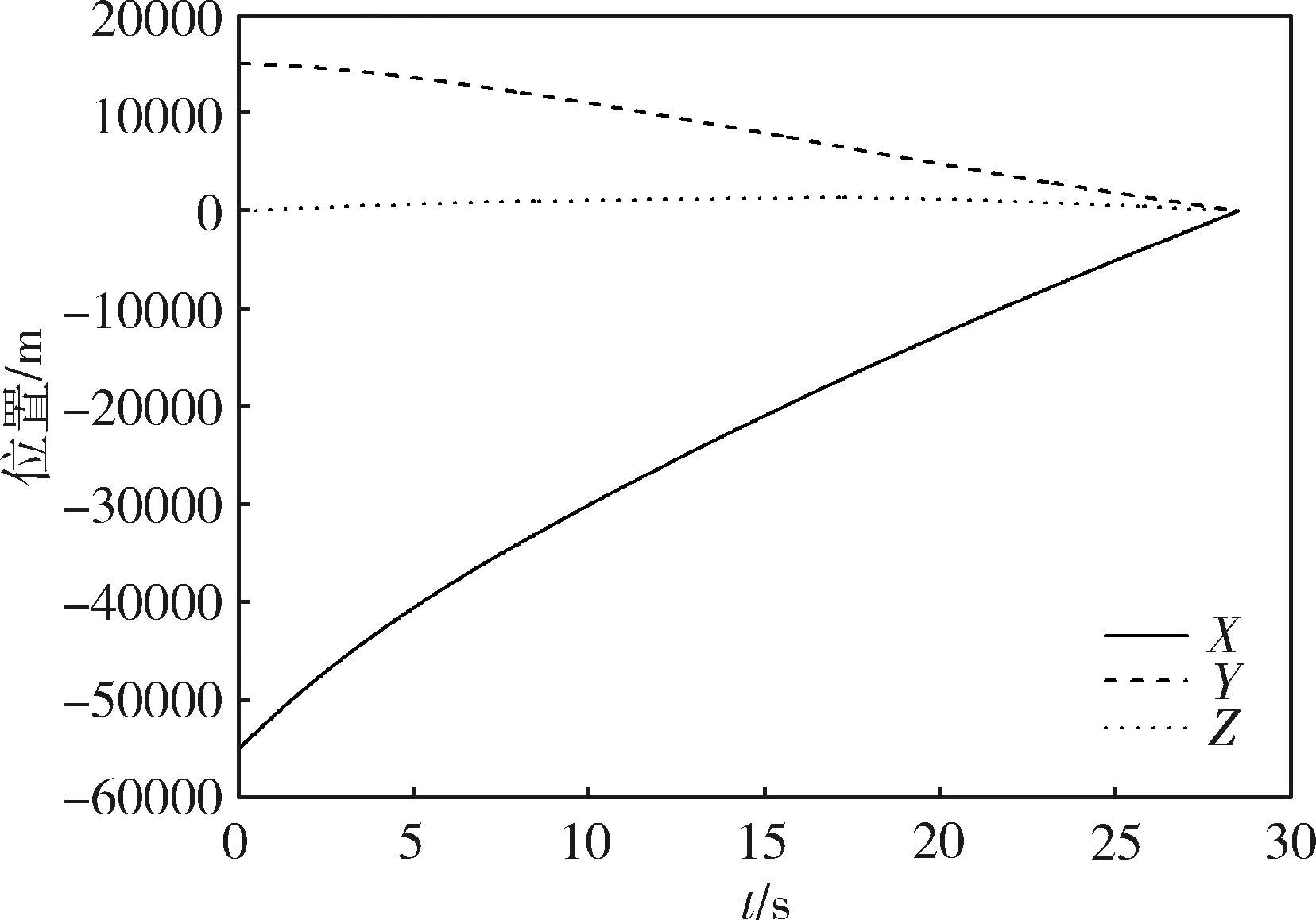
图4 飞行位置
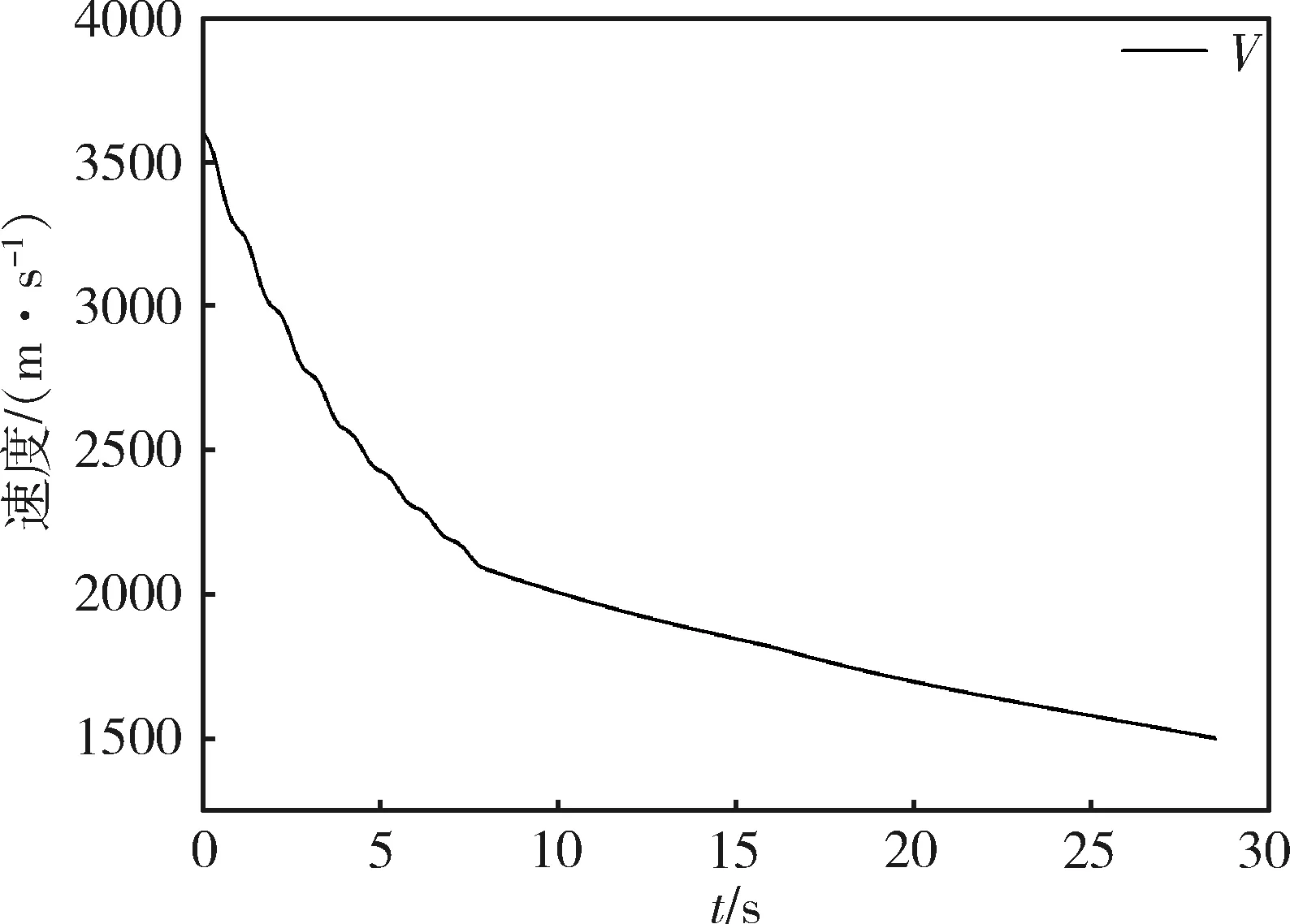
图5 飞行速度
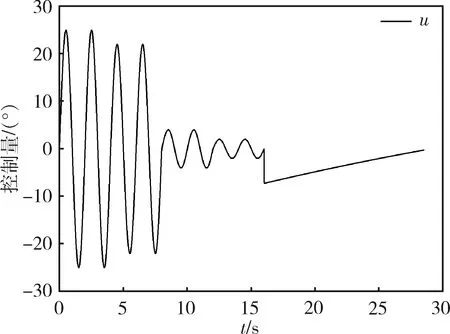
图6 控制量角度
其次在分别考虑ΔV=300m/s以及ΔV=-300m/s的偏差条件下进行仿真,仿真结果如图7~8所示,从图中可以看出飞行终端速度为1509.18m/s和1513.14m/s,与设置的终端速度一致,控制精度较高。
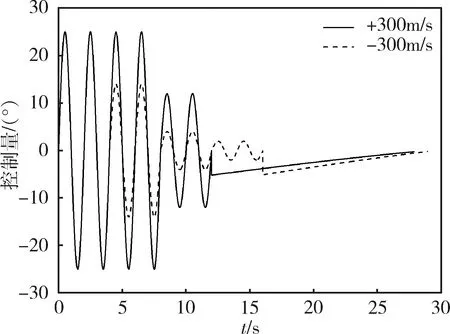
图7 施加速度偏差条件控制量角度
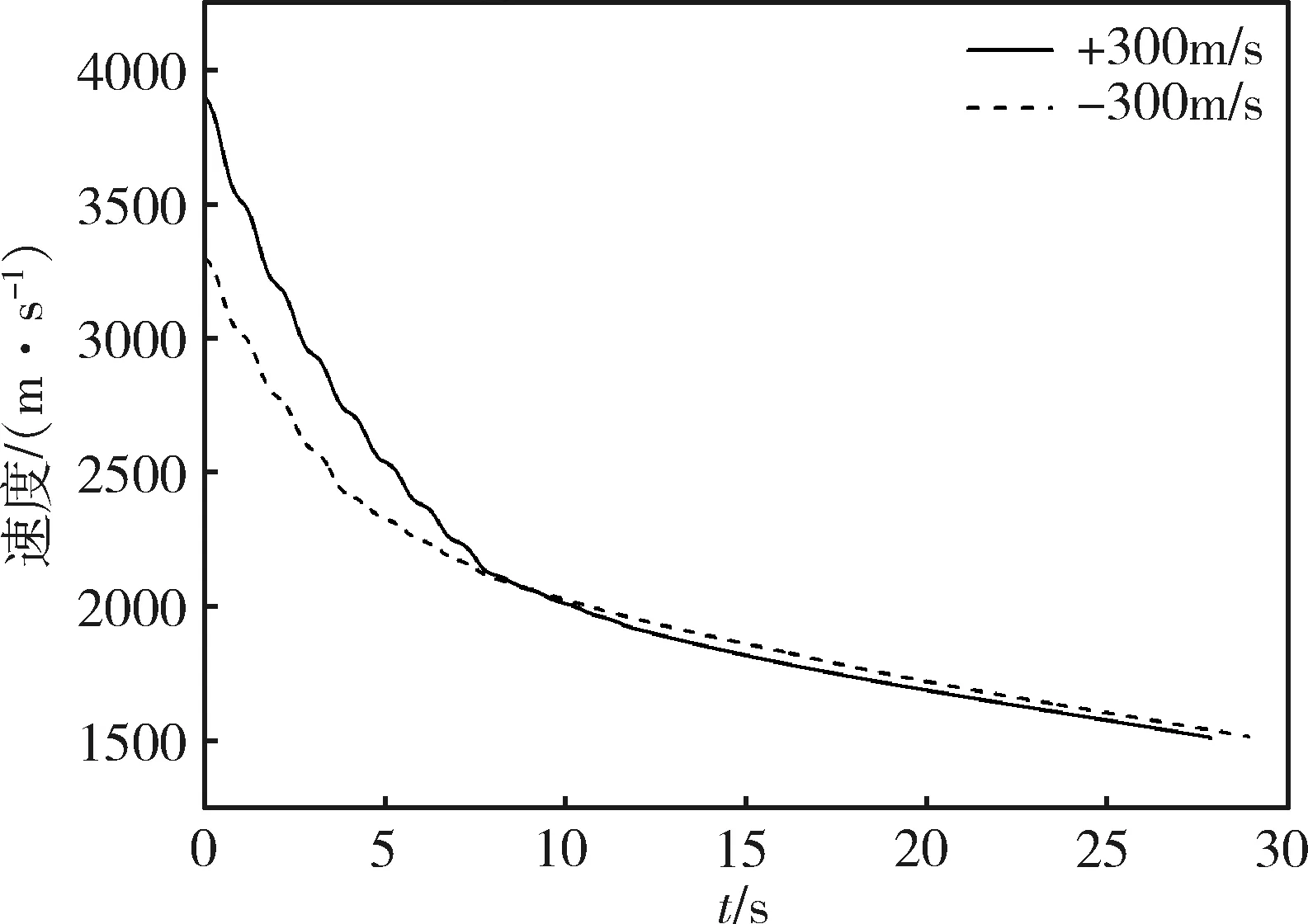
图8 施加速度偏差条件飞行速度

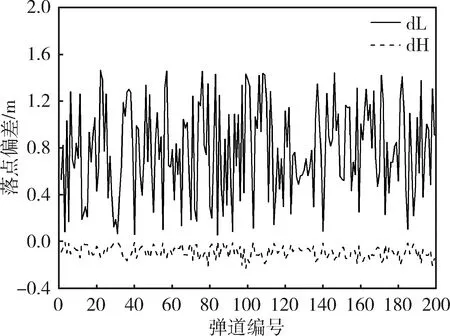
图9 终端位置偏差分布
图10 终端速度分布
5 结论
建立了再入飞行器弹道模型;分析了飞行器控制量角度与终端速度和距离目标点距离的关系;设计了以距离目标点距离和终端速度偏差为输入,控制量角度为输出的模糊逻辑系统;制定了模糊逻辑关系,设计了模糊逻辑规则,形成了基于模糊逻辑的速度控制方法,并通过仿真进行验证。仿真结果表明,该方法抗偏差能力强,终端速度控制精度高。
