基于ADAMS 的柔顺停歇机构动力学仿真与分析
2022-11-01独亚平赵春花郭嘉辉周川
独亚平,赵春花,郭嘉辉,周川
(201620 上海市 上海工程技术大学 机械与汽车工程学院)
0 引言
随着柔顺机构[1]的兴起,越来越多的研究者开始在刚性机构的基础上引入柔性杆或者柔性铰链,以此来充分利用柔顺机构的优点减少机构的摩擦、磨损等,从而改善机构的性能。柔顺停歇机构是部分柔顺机构的一种类型,主要是通过柔性杆的大变形来完成相关运动。该类机构的从动件在实际生产过程中主要做周期性、间歇性的运动,以完成换位、进给、计数、检测等多种工艺规范的要求,被广泛应用于纺织、食品、印刷等轻工业[2]。由于刚性结构实现停歇困难且昂贵,而且在运动过程中还会因为长时间相互摩擦受到累积的损伤,最终会使机构发生疲劳失效,对机构的性能产生影响,因此柔顺停歇机构的设计与研究逐渐成为重点[3-5]。对于平面连杆类停歇机构,刚性构件实现停留一般需要6~8 杆,而柔顺机构只需5 杆,甚至更少,凸显柔顺停歇机构的优点。
随着柔顺停歇机构越来越多投入使用,对该类机构的性能要求也越来越高。相比传统刚性停歇,柔顺停歇机构虽然有很多优点,但一些动力学问题也不容忽视。柔性元件长时间承受周期性或非周期性载荷,会产生疲劳、应力松弛和蠕变[6]等与动力学密切相关的问题,虽然已经有学者对柔顺机构进行动力学分析[7-9],但目前相关研究仍显不足,如果可以深入进行柔顺停歇机构动力学分析,即可通过特性分析进行相关参数优化设计,从动力学的角度改善和提高柔顺停歇机构的工作性能。
本文以2 种柔顺停歇机构作为研究对象,通过ADAMS 建立刚柔耦合模型并进行相关动力学仿真分析,通过获得运动位移以及速度相关曲线分析其停歇特性。
1 柔顺停歇机构1 动力学分析
1.1 机构1 简图
如图1 所示为使用初始直铰接-铰接梁作为从动件的柔顺停歇机构1。该机构由刚性曲柄、两端销接的柔性长梁和柔性短梁、滑轨系统、可移动塞子和DC 电机组成,主要通过利用销-销柔性梁的屈曲现象获得停顿。工作原理是,当曲柄刚开始旋转时,滑块保持静止。在旋转过程中,曲柄旋转压缩柔性梁,当连接器的水平分力低于柔性梁的临界屈曲载荷时,连接到柔性梁的滑块不移动,产生精确的第1 次停顿。当水平力达到柔性梁的临界屈曲载荷时,它会产生屈曲,为滑块提供位移。当曲柄继续旋转时,会发生瞬间的第2 次停顿。
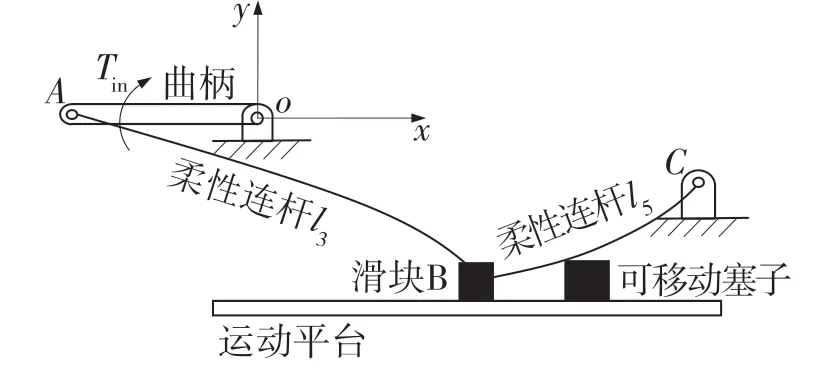
图1 含初始直梁的柔顺停歇机构简图Fig.1 Compliant dwell mechanism with an initial straight beam
1.2 机构1 刚柔耦合模型
通过定义材料属性和各零件之间的约束关系,建立了如图2 所示的柔顺机构1 的虚拟样机模型。建立好模型之后,定义每个链接之间的关节,删除不必要的零件,进行运动分析。由于滑块可以定义为2 个梁连接处的水平方向运动,因此删除了滑轨系统。施加驱动3 rad/s,设定仿真时间为8 s,执行步进功能。

图2 柔顺停歇机构1 刚柔耦合模型Fig.2 Rigid-flexible coupling model of compliant dwell mechanism 1
1.3 ADAMS 仿真结果
在仿真的一个周期内,记录了如图3 所示的整个机构运动中柔性梁的变化过程。可以看到,2 根柔性梁都经历了大变形。在t=0.5 s 时柔性长梁还没有发生变形;继续运动0.3 s 之后,长梁被压缩,短梁被拉伸,均发生了变形,此后机构继续变形;达到1.5 s 时,2 根梁达到了最大变形;曲柄继续旋转,柔性长梁被释放,短梁被拉伸,逐渐恢复到初始状态。
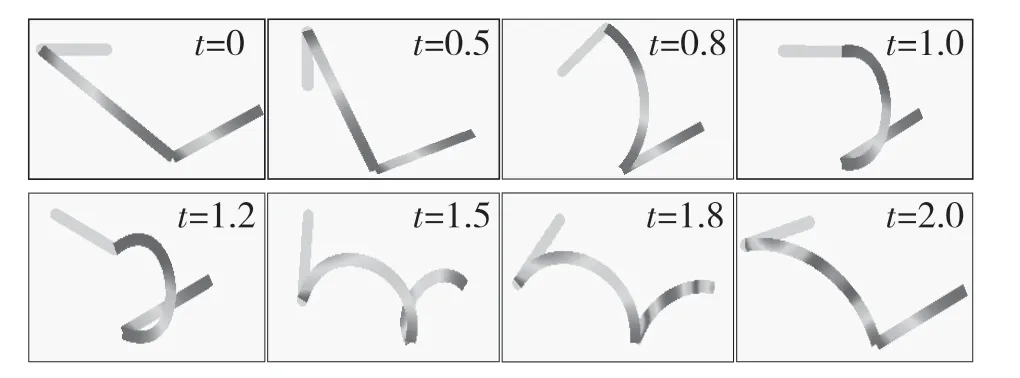
图3 机构1 不同时刻的柔性梁变化示意图Fig.3 Schematic diagram of flexible beam changes at different times
仿真结束后输出柔性长杆末端点x方向的位移,即为该柔顺停歇机构滑块的位移曲线、速度曲线,如图4、图5 所示。由图4 可知,该机构最初滑块不会移动,然后到达柔性梁的屈曲载荷时,滑块会迅速达到位移最大值,在曲柄返回过程中,由于短梁的压缩作用,滑块暂时不会移动,因此出现长时间停留,约为整个周期的1/2。

图4 机构滑块位移-时间响应Fig.4 Mechanism slider displacement-time response
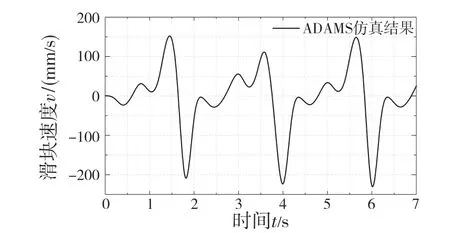
图5 机构滑块速度-时间响应Fig.5 Mechanism slider speed-time response
2 柔顺停歇机构2 动力学分析
2.1 机构2 简图
如图6 所示,引入一种新的5 杆柔顺近似驻留机构,柔顺弧为从动件。该机构包括一个刚性曲柄,最初是直的柔顺构件3,一个刚性杆B,以及作为从动件的固定端条件的半圆形柔性弧链接。该机构的工作原理:当曲柄转动时,挠性联轴器保持直线运动并推动挠性圆弧,从而产生预弯曲变形。在达到柔性连杆3 临界屈曲载荷之前其表现为刚体。直到此时只有弹性随动弧偏转。在耦合器上达到临界屈曲载荷后,梁屈曲并继续偏转,随动弧上达到快速通过屈曲载荷时,柔性梁推动圆弧从软化弹簧区到硬化弹簧区快速穿过。

图6 具有屈曲的柔顺停歇机构简图Fig.6 Schematic diagram of a compliant dwell mechanism with a buckling
2.2 机构2 刚柔耦合模型
根据图6 建立了如图7 所示的刚柔耦合模型。根据实际建立各部件之间的连接,施加驱动角速度为3 rad/s,设置仿真时间为10 s、步长为50 进行仿真。

图7 柔顺停歇机构2 刚柔耦合模型Fig.7 Rigid-flexible coupling model of compliant dwell mechanism 2
2.3 ADAMS 仿真结果
在仿真的一个周期内,记录了如图8 所示的整个机构运动中柔性梁的变化过程。可以看到,两根柔性梁都经历了大变形。在t=0.5 s 时,柔性长梁达到最大变形,短梁被拉伸;继续运动0.5 s 之后,长梁和短梁都被释放。此后机构继续发生变形,短梁由向外拉伸变成反方向拉伸,并且变形越来越大,随着曲柄的逐渐旋转,机构恢复到初始状态。

图8 机构2 不同时刻的柔性梁变化示意图Fig.8 Schematic diagram of flexible beam changes at different moments of mechanism 2
仿真结束后,输出柔性长杆3 末端点x方向的位移即为该柔顺停歇机构的位移曲线、速度曲线。图9 可以看到,该机构位移随着曲柄的旋转慢慢增大,在0.5 s 达到最大值,并存在一段停留;此后机构位移慢慢向反方向运动,在1.5 s 达到最小值,进行周期性运动。图10 为机构对应的速度-时间响应曲线,与位移对应也是周期性变化。
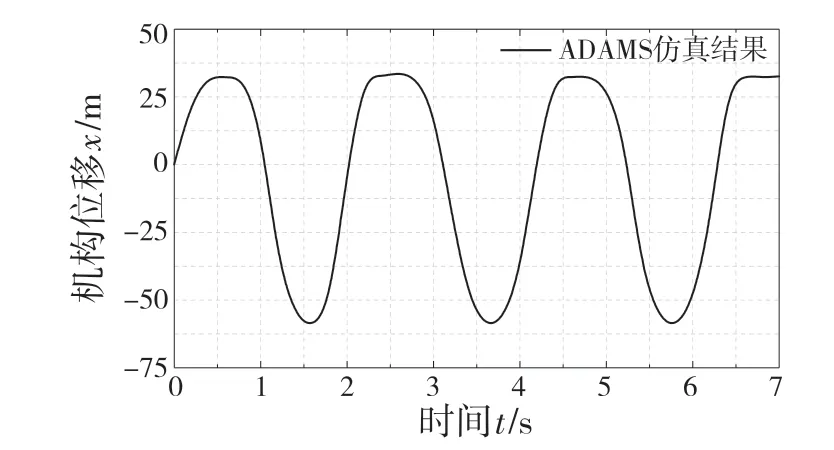
图9 机构滑块位移-时间响应Fig.9 Mechanism slider displacement-time response

图10 机构滑块速度-时间响应Fig.10 Mechanism slider speed-time response
3 结论
(1)本文主要通过ADAMS 对2 种柔顺停歇机构进行建模,并进行相关动力学分析,得到了2种机构对应的位移-时间、速度-时间响应曲线。由分析结果可知,2 种机构在运动中都存在停歇时间,并且都是周期性运动。
(2)由于机构在运动中存在应力应变、蠕变等问题,可以在后续研究中继续分析机构的应力及疲劳问题,从而发现提高机构寿命的途径。此外还可以以机构停留时间为优化目标,更改机构尺寸改变机构的停留时间,由此满足不同应用场合的机构停歇要求。
