基于模糊理论的并联混合动力汽车模式切换冲击控制
2022-11-01唐传茵潘秉钰李静红闫羽潘律
唐传茵,潘秉钰,李静红,闫羽,潘律
(1.110819 辽宁省 沈阳市 东北大学 机械工程与自动化学院;2.310018 浙江省 杭州市 浙江理工大学;3.201306 上海市 上海电机学院)
0 引言
我国化石燃料存在分布不均以及开采难度大等问题,为实现可持续发展,汽车行业除了改善安全性、舒适性和传动系统效率外,优化整车油耗、降低污染物排放成为关注的焦点[1]。在推进交通能源转型的过程中,混合动力汽车技术在传统汽车的基础上进行设计和改进,传统车企成立新能源研发中心开展混合动力汽车技术的研究。
混合动力汽车对多个动力源的开启和关闭实现协调控制,能够使车辆工作在不同模式下,但在模式切换过程中会导致发动机、电机的扭矩发生突变,产生冲击[2]。冲击产生的原因总体上有2 类:一类是动力源响应速度和响应时间不同造成的。由于发动机构造复杂且自身影响因素众多,其转矩无法跟踪控制器设定的目标值[3];另外一类是离合器的接合和分离引起的。
汽车在实际行驶过程中,由电机驱动向含有发动机启动过程的模式切换时,电机所输出扭矩除了驱动车辆行驶外,还需多余扭矩反拖发动机,此时如果对离合器不加以控制会导致结合速度过快,整车冲击度数值会瞬间增大,进而通过车身等附件反馈至驾驶舱,降低了整车的平顺性和驾驶员及乘客的乘坐舒适性[4]。基于离合器控制的动态协调控制策略的核心思想是通过运用不同理论和方法对离合器接合和分离过程进行控制,以降低模式间切换动力源不同步而产生的冲击度[5]。
本文针对并联混合动力汽车的模式切换冲击进行了研究。首先根据参数匹配结果,基于AVL Cruise 平台搭建了模型;然后为了有效抑制模式切换所产生的冲击,针对离合器由分离到接合的模式切换过程进行了模式切换控制,设计了模糊控制器,分析了此类模式切换过程中动力传递的平顺性。
1 混合动力汽车系统建模
并联式结构系统区别于能量源的联合方式,是基于汽车传动系统的联合,即通过机电耦合装置与驱动轴连接,控制器根据传感器信息,在单一或者同时使用动力源驱动车辆行驶。并联式系统中单个动力源所需的功率一般很小,其中电系统回路除了在扭矩较小或车速较低时提供驱动车辆行驶所需能量外,还起到平衡发动机回路所受负载的作用,以使其工作在高效、低排放区。
进行混合动力汽车参数匹配,包括发动机的参数匹配、电机的参数匹配、动力电池的参数匹配、传动系的参数匹配等。基于AVL Cruise 平台搭建整车模型。
进行整车信号连接,包括发动机和中间离合器之间的机械连接,动力电池组和电机之间的电气连接,以及混合动力汽车控制器和被控对象间的总线信号连接。控制策略部分在Simulink 平台上搭建,控制器部分一般由信号输入模块、模式判断模块、能量管理策略模块和信号输出模块组成。整车模型、电机模块的信号总线连接、控制器内部结构分别如图1—图3 所示。
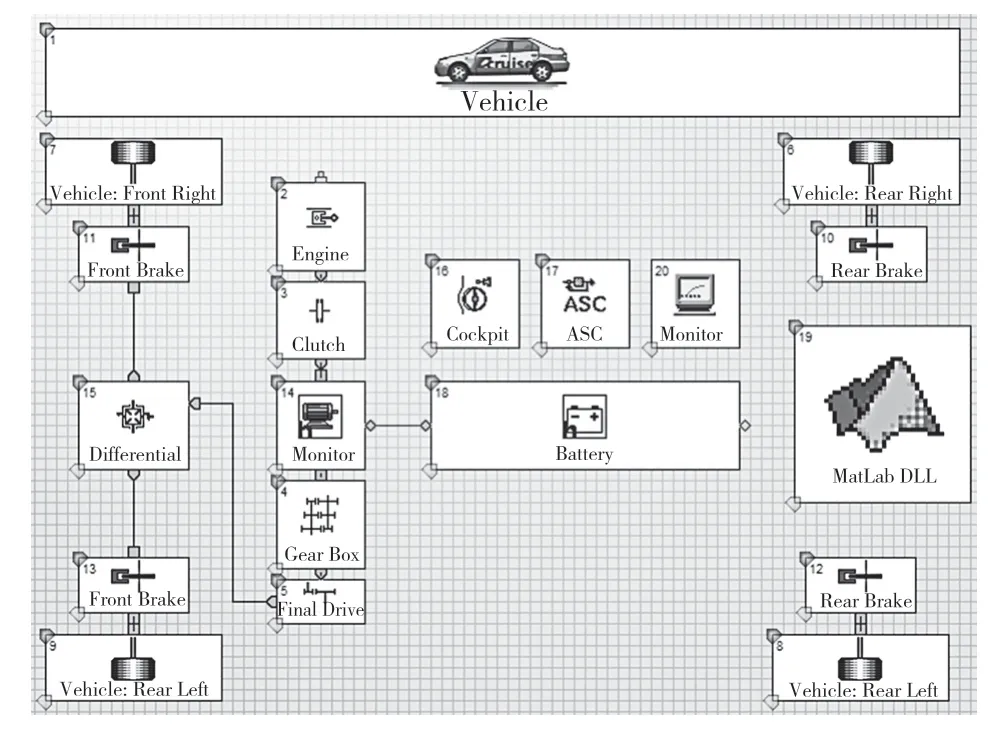
图1 整车仿真模型Fig.1 Simulation model of vehicle
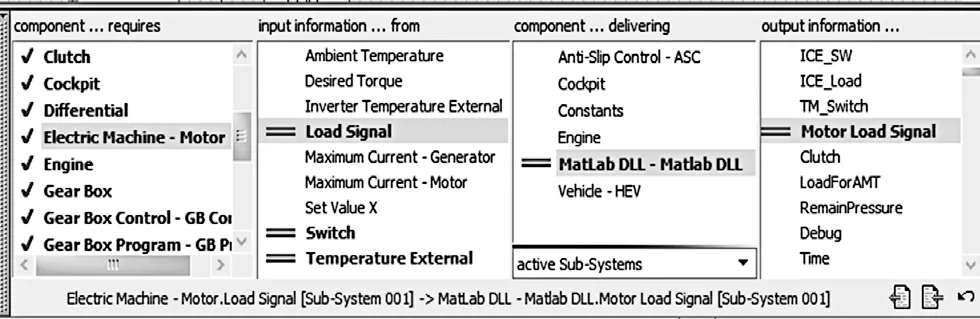
图2 电机模块的信号总线连接Fig.2 Signal bus connection of motor module
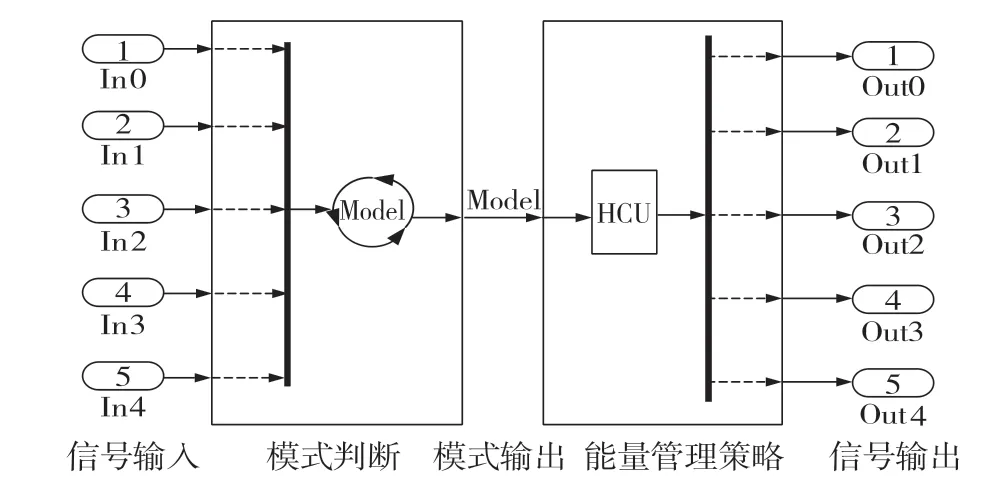
图3 控制器内部结构Fig.3 Internal structure of controller
2 模式切换控制
2.1 模式切换过程评价指标
不同车企根据实验条件及实验成本对混合动力汽车模式切换效果所采用的评价指标不尽相同。目前,普遍采用的模式切换评价方法分成主观评价法和客观评价法,其中客观评价法又分为冲击度、模式切换时间与滑磨功评价。混合动力汽车工作模式间切换产生的冲击度可以去除实际行驶道路不平整以及车身所带部件噪声等附加因素的影响,可以做到与驾驶员及乘客的感觉同步,能够准确地反应车辆实际驾驶过程中的动力性特征,其值越小,表明混合动力汽车工作模式间的切换越平稳,驾驶员及乘客的舒适性相应也有所提升。
冲击度的计算公式为

车辆行驶过程中动力学方程为:

式(1)—式(3)中:J——冲击度;a——纵向加速度;v——车辆实际行驶速度;G——作用于汽车上的重力;f——滚动阻力系数;α——道路坡道角;CD——空气阻力系数;A——迎风面积;ρ——空气密度;δ——汽车旋转质量换算系数,主要与飞轮的转动惯量、车轮的转动惯量以及传动系的传动比有关。
综合式(1)—式(3),得出冲击度为汽车驱动扭矩变化率的函数。
本文主要关注混合动力汽车在不同工作模式间切换的平顺性,选择冲击度作为评价指标[6]。当不同工作模式间切换所产生的冲击度J<5 m/s3时,能够有效提高整车的平顺性能和驾驶员及乘客的乘坐舒适性;当不同工作模式间切换所产生的冲击度5 m/s3<J <10 m/s3时,驾驶员及乘客感受冲击明显;当车辆的冲击度J >10 m/s3时,驾驶员及乘客能分辨不同的冲击。
2.2 模式切换控制算法研究
混合动力汽车根据车载传感器检测实际行驶道路信息的差异,控制器可以灵活调整车辆使其实现多种运行模式的切换。为实现不同工作模式间平稳切换,降低整车冲击度,提高驾驶员及乘客的乘坐舒适性,需要确定影响整车平顺性的具体模式切换过程,并针对其模式切换过程做出相应控制。混合动力汽车驱动系统不同运行模式下动力源和中间离合器的具体工作状态如表1 所示。

表1 驱动系统在不同运行模式下的工作状态Tab.1 Working state of driving system in different operating modes
混合动力汽车由电系统回路驱动车辆行驶切换至含发动机回路参与的模式行驶时,由于会经过发动机启动阶段、转速同步阶段、扭矩再分配阶段,使得切换过程相对复杂,控制难度大。对于发动机启动阶段,容易出现动力系统中断或扭矩波动等现象。由于离合器由分离到接合的模式切换是造成整车冲击度较大的关键性因素,本文主要针对这一类模式切换制定相应的控制策略。接下来应用模糊理论对混合动力汽车工作模式切换中离合器的接合过程进行控制。
2.3 模糊控制器设计
针对混合动力汽车模式切换过程需达到的目标,进行模糊控制器设计。模糊控制器输入量为加速踏板变化率与离合器主动盘与从动盘转速差的绝对值,输出量为离合器接合位移变化量。模糊控制器输入、输出量如图4 所示。

图4 模糊控制器输入、输出量Fig.4 Input and output of fuzzy controller
为了使模糊控制器具有通用性以及便于模糊算法设计,将输入量经过归一化处理,统一映射到模糊论域[0,1]上。覆盖模糊论域的模糊子集数量应当适量。划分的模糊子集越多,控制精度越高,但是模糊规则数量和运算量会大幅增加。在模糊规则取得完备性满足的时候,规则的数量不应该太多,以便使控制器的设计和应用更加便捷。其中,输入变量加速踏板变化率Rate的隶属函数选择高斯型,趋向于左疏右密分布;电机端与发动机端转速差Abs 的隶属度函数选择高斯型,趋向于左密右疏分布;输出变量的隶属度函数选择梯形。模糊子集划分如表2 所示。表2 中:VS——非常小,S——小,MS——中小,M——中等,MB——中大,B——大,VB——非常大。离合器接合位移变化量ΔL的观测曲面如图5 所示。
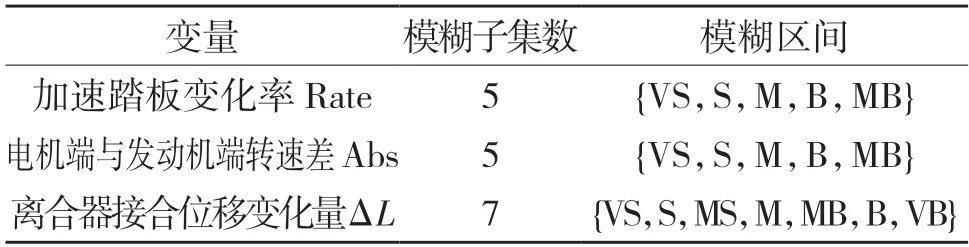
表2 各变量的模糊子集表Tab.2 Fuzzy subset of each variable
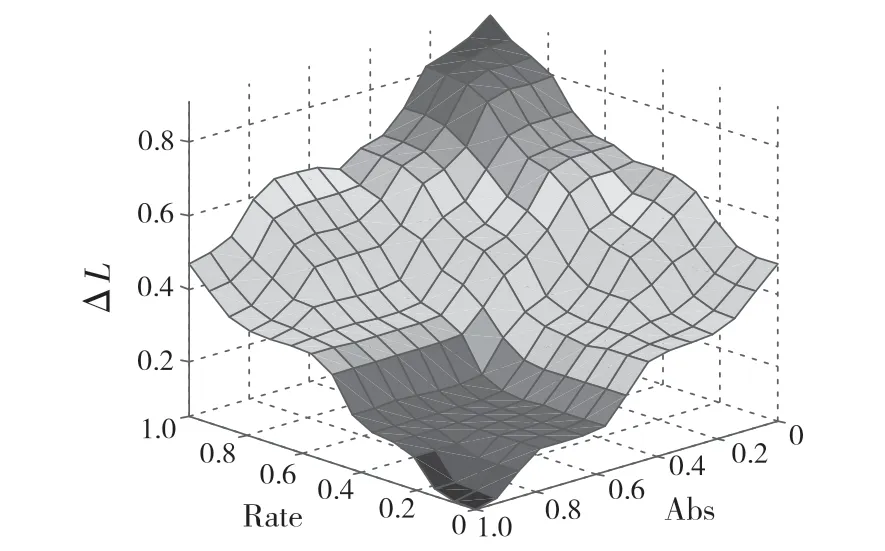
图5 离合器接合位移变化量ΔL 的观测曲面Fig.5 Observation surface of clutch engagement displacement variation ΔL
3 仿真分析
选择UDDS 工况进行仿真分析,针对测试工况搭建逻辑门限值控制策略。逻辑门限值控制策略的核心思想是在制定控制策略前确定好整车运行的规则参数,根据部件的稳态效率图,通过电机对发动机辅助作用,动态调节发动机的工作区间。其基本原理为:混合动力汽车车速较低或整车所需扭矩位于发动机低效区时,驱动车辆行驶所需能量由电系统回路单独提供,当整车所需扭矩位于发动机高效区时发动机回路开始提供能量,从而实现对发动机工作区间的动态调整。模式切换过程中发动机转矩变化、电机转矩变化曲线分别如图6、图7 所示,模式切换过程中冲击变化曲线如图8 所示。
由图6、图7 可知,在23.598~24.198 s 时,混合动力汽车以纯电动模式行驶;24.379~24.980 s 时,汽车进入发动机启动模式,电机除了提供驱动车辆行驶所需扭矩外,还要提供多余扭矩带动发动机;25.152 s 后,汽车进入混合驱动模式行驶,控制器进行扭矩再分配,发动机扭矩小幅上升至目标扭矩,由于此时电机负责扭矩补偿,电机扭矩逐渐下降至目标扭矩。
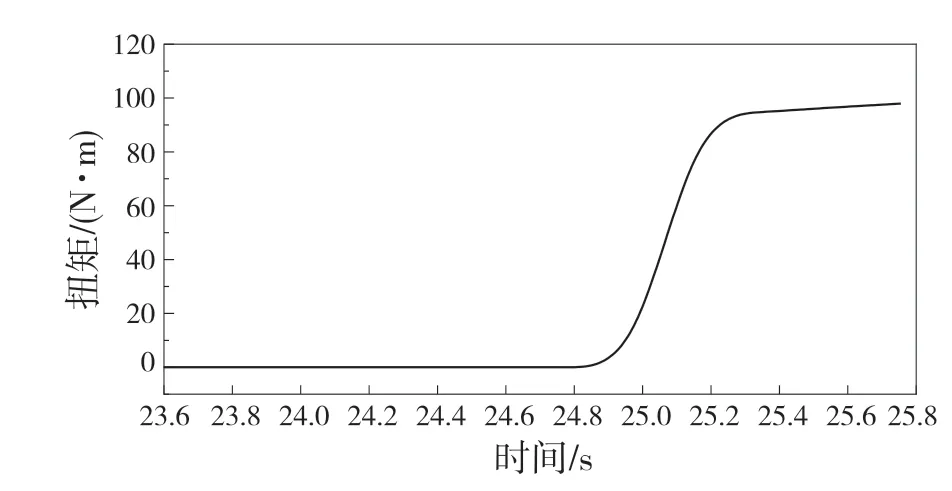
图6 发动机转矩变化曲线Fig.6 Change of engine torque

图7 电机转矩变化曲线Fig.7 Change of motor torque
由图8 可知,在23.598~24.198 s 时,混合动力汽车以纯电动模式行驶,动力源只有电机,冲击度为0;在24.379 s 时,汽车由纯电动进入发动机启动模式,由于瞬间启动发动机,冲击度增加;24.980 s 时发动机点火启动,启动瞬间冲击度增加至4.489 m/s3;25.152~25.752 s 时,汽车进入混合驱动模式行驶,冲击度逐渐下降至0。

图8 模式切换过程中的冲击度Fig.8 Jerk during mode transition
所搭建的控制策略最大冲击度为4.489 m/s3,小于5 m/s3。以上结果表明,该控制方法能保证离合器由分离到接合模式切换过程中动力传递的平顺性,提高了驾驶员及乘客的乘坐舒适性。
4 结语
1) 进行混合动力汽车的系统建模。基于AVL Cruise 软件平台搭建了仿真所需模型,并对仿真模型的总线信号、仿真环境进行连接和设置,为后续模式切换控制与能量管理策略的开发奠定了基础。
2) 选择冲击度作为模式切换效果的评价指标,针对离合器由分离到接合的模式切换过程设计了模糊控制器,选择典型道路信息对控制器控制效果进行验证,结果表明模式切换过程中冲击度的峰值小于冲击度评价指标,本文所提出的控制方法可以有效地提升此类模式切换的平顺性。
