基于摄影测量的简支梁桥损伤识别
2022-10-27张劲泉
李 萍,张劲泉,王 磊,王 陶,闫 昕
(1.交通运输部公路科学研究院,北京 100088;2.中路高科交通科技集团有限公司,北京 100088)
0 引言
在自然环境、材料劣化、施工缺陷、超载等因素的作用下,服役桥梁结构的安全性能会逐渐降低,对人民的生命财产有重大威胁[1]。传统的桥梁损伤检测对损伤定位和损伤程度判定缺少经济而有效的办法,科学、高效、规范的桥梁损伤判定具有重要的社会、经济和技术价值。
动力作用下的桥梁变形测量是安全性分析和性能检测的一项重要内容。目前已有不少专家学者[2-5]提出如基于模态曲率、固有频率、振型变化、柔度矩阵等研究方法检测桥梁结构损伤。比较而言,固有频率法利用加速度传感器捕捉桥梁结构的振动频率检测损伤,可操作性强,但是高阶模态的结构振动频率受到噪声干扰,影响测量精度。柔度矩阵法在理论上可行,但在实际工程中可操作性较差。结构振型对损伤不敏感,因此评估精度较差。Pandey等[6]较早提出了基于曲率模态差的梁结构的损伤识别方法。郑明刚等[7]阐述了曲率模态对局部损伤的敏感性优于结构振型指标。
结构的损伤会造成质量和刚度的下降,这将导致结构模态参数的变化。由结构力学原理可知,曲率与结构抗弯刚度成反比。如果桥梁结构没有损伤,则等截面桥梁结构的曲率模态是圆滑曲线。当局部位置出现损伤时,将造成抗弯刚度降低,导致曲率增大,损伤位置出现峰值突变。突变反映了结构的损伤信息,包括损伤位置和损伤程度。基于以上原理可以对桥梁损伤识别进行定位和定量分析。谢启芳等[8]证明了曲率模态技术对木梁检测损伤有效。郭杏林等[9]指出该方法适用于梁式结构、桁架、板式等多种类型的结构损伤定位。刘义伦等[10]阐明了曲率模态识别损伤的优势及存在的问题。
基于曲率模态检测损伤物理意义明确,但是国内外无相应的传感器能直接测得曲率模态,主要采用中心差分法处理位移模态,近似计算得到曲率模态。目前位移测量方式可分为:(1)接触式测量,通过布设位移传感器LVDT(或加速度传感器)获取结构动态变形数据,布设过程耗费人力物力,传感器数量有限。(2)非接触测量,基于GPS、全站仪等设备测量结构变形,设备价格高,测点数量有限。
随着视频图像处理技术和图像采集硬件的逐渐发展,基于视频的结构位移监测方法逐渐成为研究热点。该方法采集被测结构振动的视频,借助目标追踪算法得到被测点在图像中的运动轨迹,再通过图像与现实的几何关系换算结构的位移。在该方法的实施过程中,相机架设在远离结构的固定点位,对结构无干扰。相机视野范围涵盖测量范围广,可多点同步测量,因此该方法可以实现远距离、非接触、高精度、多点同步监测[11-12]。文献[13]给出了基于机器视觉技术的结构位移测量方法,并通过实桥测量案例证实了该方法与GPS测量结果高度一致。文献[14]证实了基于视频监测结构位移与LVDT监测结果相近,测量误差小于5%。如前所述,传统的测量方式测点数量有限,而近景摄影测量法从理论上来说可以获得较为密集的测点,因此该方法更适用于获得包含损伤信息的曲率模态。
经文献调研,当前应用曲率模态检测损伤的研究大多基于数值模拟算例进行分析,大部分学者都采用单元刚度折减的方式模拟损伤。少数学者采用降低单元高度的方式改变抗弯惯性矩,进而降低抗弯刚度。数值模拟的损伤都是以整个单元的长度作为损伤的最小尺度,这样损伤的范围比较大,计算所得损伤位置的曲率突变也较为明显。少数学者给出了试验验证的例子,但是普遍采用加速度传感器采集数据,得到曲率模态。虽然近景摄影测量法可以获得结构的动位移,但是采用近景摄影测量法获取曲率模态的研究案例较少,对于该方法的检测精度、适用性等方面仍然存在很多问题要解决。
本研究基于近景摄影测量法获取梁桥多点动位移,给出2种提取动位移的数字图像处理方法。采用FFT变换由动位移时程曲线确定振型。根据主频和振型模态,由中心差分法计算竖向曲率模态。根据突变判断损伤位置,简支梁在不同测点间距曲率模态的计算结果表明,加密的测点间距更易于体现损伤位置的曲率突变,从而证明近景摄影测量法更适合作为以曲率模态检测损伤的技术手段。
1 基于摄影测量获取梁桥竖向曲率模态
1.1 基于摄影测量提取多点动位移
基于摄影测量的结构位移监测对相机拍摄的被测结构视频做目标追踪处理,得到测点在图像中的运动轨迹,再通过相机标定从图像坐标系换算到实际坐标系,得到测点的动位移。这种监测系统主要包括相机、镜头、计算机及处理软件、标志物。在不具备纹理特征的被测表面,需要简单布设标志物才能识别。
1.1.1 基于特征识别获取多点动位移
根据被测物表面存在的特征选择相应的识别方法,包括灰度特征、颜色特征、梯度特征、形状特征和图像卷积特征等等。常用的特征点描述算子包括Harris角点、SIFT算子、SURF算子等。其中基于形状特征的识别方法较为简单,易于理解。形状特征包括圆形、正方形、十字交叉等。下面以圆形特征识别为例介绍获取多点动位移的方法。
比较经典的在图像中寻找圆形的方法是基于圆形Hough变换(CHT)的算法。该方法抗干扰能力强,在噪声、遮挡和光照变化条件下表现相对稳健。
CHT算法从边缘像素收集用于表示累加器的贡献或选票,该累加器描述了代表圆心的参数空间(Hough空间),然后通过找到参数空间的局部最大值来提取圆。CHT方法有3个基本步骤:(1)累加器数组计算。高梯度的前景像素作为候选像素,将候选像素在背景像素构成的固定半径圆的模式中投票。(2)中心估计。属于同一个图像圆的各候选像素的投票趋于在对应于该圆中心的累加器数组中累加,可通过检测累加器数组中的峰值来估计圆心。(3)半径估计。如果同一累加器数组用于多个半径值,则必须以单独的步骤来估计检测到的圆的半径。图1给出了基于CHT算法识别圆形标识及其圆心的示例,通过追踪视频中的圆心坐标就可以得到测点的动位移。

图1 基于CHT算法识别圆形标识及其圆心Fig.1 Recognition of circular signs and their centers based on CHT algorithm
1.1.2 基于图像相关法获取多点动位移
数字图像相关法(Digital Image Correlation DIC)是将目标区域变形前后的2幅数字图像,通过相关计算获取感兴趣区域的变形信息。主要流程是:(1)在初始图像中选取追踪目标的图像子集(通常称为感兴趣区ROI),即模板。(2)针对模板对后续的图像序列做相关性计算,相关性系数最大的区域即为模板变形后的位置。(3)整像素位移计算后,通过插值计算得到亚像素位移。
在DIC中比较常用的相关准则为:归一化互相关函数Ccc、归一化平方和函数CLS。文献[15-17]指出Ccc受光照影响小,单峰性最好且抗干扰能力最强。本研究选择采用归一化互相关函数Ccc计算参考子区灰度值与目标子区灰度值的相关性。
(1)
(2)
(3)
经由整像素搜索算法按照既定的搜索路径,逐个筛选得到相关系数极大值所对应的待测点,作为参考图像的指定点在变形后的整像素匹配点,进而得到在整像素的位移。为了得到更高的测量精度,需要进一步优化搜索,对图像进行像素插值采样,再进行图像相关计算,实现亚像素精度的位移求解。
本研究采用了圆形黑白相间的标识牌,通过DIC法追踪标识牌区域在变形过程中的竖向位移,得到结构关键点的竖向动位移时程数据。
1.2 曲率模态检测损伤的基本理论
1.2.1 位移模态的获取
获取位移模态需要求解2个参数:主频和振幅。根据结构动力学理论[18]可知,将位移时程曲线做时频转换可得到结构的各阶主频,各点在主频处的幅值连线即为位移振型。利用DIC法得到视频图像序列中各测点的位移时程,再通过傅里叶变换FFT得到各测点的频域特征,从而获得被测结构的位移模态。
1.2.2 曲率模态
从理论上来说,曲率模态为位移模态的二阶导数。在实际应用中无法直接获得,可通过中心差分法近似计算结构振型的模态曲率,第r阶振型在节点i处的模态曲率为:
(4)

1.2.3 曲率模态与损伤
由结构动力学原理[19],梁弯曲变形可以表达为:
(5)
根据式(5)可知,结构的曲率函数与曲率模态呈正比,如等截面结构未损伤,曲率模态是圆滑曲线。曲率与抗弯刚度成反比,当局部位置出现损伤时,结构抗弯刚度随之下降,损伤位置的曲率将变大,曲率模态将出现明显变化,损伤位置出现的峰值突变导致的曲率模态曲线不再是圆滑的。曲率模态曲线突变的出现位置和突变程度,反映了结构的损伤位置和损伤程度,基于以上原理可对桥梁损伤识别进行定位和定量分析。
1.2.3 曲率模态的损伤表征指标
张晋等[20]指出曲率模态法对模态振型节点位置的损伤不敏感。对于存在多处损伤的结构,该法不能有效反映结构的损伤程度。为此,学者们开展了一系列研究[21-23],基于曲率模态做进一步运算,给出了不同的曲率模态损伤表征指标。
(1)曲率模态差(MDC)[24]
曲率模态差又称为模态挠度曲率差,第r阶振型在节点i处的模态曲率差可以表示为:
(6)

文献[25]指出使用曲率模态差值能很好地识别出损伤单元的位置,但不能准确地识别出单元损伤程度。文献[26]指出在局部损伤与相对较小损伤情况下,曲率模态差对损伤位置并不敏感。
(2)曲率模态变化率(CMCR)
对于实际结构而言,很多时候是没有损伤前对应的数据可以用来对比的。针对损伤后的位移模态计算曲率模态的指标有:曲率模态变化率、损伤判别因子、即刻曲率模态损伤因子、改进的损伤识别参数等等。本研究选取了曲率模态变化率(CMCR)作为代表。
曲率模态变化率是曲率模态的一阶导数。
(7)
文献[27]指出采用曲率模态变化率参数进行损伤识别时,综合奇、偶数阶在曲线形状上的表现差异可以排除支座干扰,判断真实损伤。曲率变化率参数在进行多处损伤识别时,损伤定位能力较强。
2 简支梁的固有频率计算
根据结构动力学原理可知,简支梁的固有频率为:
(8)
(9)
A=bh,
(10)
式中,i为模态阶数;l为简支梁跨度;E为弹性模量;ρ为材料密度;A为截面面积;I为惯性矩;b为截面宽度;h为截面高度。
式(8)~(10)可简化为:
(11)
本研究选取的等截面简支梁几何参数为:长106.3 cm,宽度5 cm,厚度4 mm,弹性模量3 200 MPa,密度1.05 g/cm3,泊松比0.32。
单位统一到国际标准单位,整理如下:
L=1.063 m,b=0.05 m,h=0.004 m,E=3.2×109N/m2,密度=1 050 kg/m3,按照公式计算前3阶主频为:5.624,22.496,50.616 Hz,为试验梁确定主频提供参考依据。
3 简支梁曲率模态试验
3.1 试验概况
选取简支PVC梁作为研究对象,长、宽、高分别为1.06,0.05,0.004 m,两端用支架支撑模拟简支梁。由于PVC梁近乎透明无色,在侧面粘贴标识牌(标识牌的间距为2.5 cm),在两端分别保留3 cm 用于固定试件,在中间100 cm范围内粘贴了39个标识牌,这39个测点的编号即为原始测点编号。PVC简支梁装置如图2所示。采用4 096×3 000像素的摄像机进行拍摄,镜头焦距为8.5 mm。

图2 PVC梁Fig.2 PVC beam
试验选用了2款同型PVC梁,一片梁作为无损梁测试,一片梁在跨中加工了1条横向裂缝。裂缝宽度为1 mm,深度为1 mm。在跨中施加竖向初始位移使PVC梁自由振动,采用相机采集振动视频。由于不同采样时间的光线差异,无损梁的采样频率为98 Hz,有损梁的采样频率为65 Hz。
3.2 试验数据分析
为了对比测点间距对曲率模态法检测损伤的影响,在损伤尺度不变的情况下,按照不同测点间距提取测点动位移数据,求解振型和曲率,观察曲率模态曲线的突变情况。分3次提取测点振动数据,首次采用10 cm间隔选择测点,第2次按5 cm间隔选择测点,第3次以2.5 cm间隔选择测点。由DIC法处理视频数据,获得多点动位移时程曲线,经傅里叶变换得到频域数据,从中可以看出一阶主频很明显(6.4 Hz),与计算主频接近,说明试验装置符合简支梁的设定。对位移模态二次中心差分获得曲率模态。
无损梁的振动数据处理结果如图3、图4所示。其中,图3为靠近支座的边点、跨中测点的位移时程曲线,图4为测点间隔为10 cm时的一阶振型图,测点间距加密后的无损梁的振型和曲率图都显示在后面和有损梁数据的对比图中,此处从略。

图3 无损梁边点、中点位移时程曲线Fig.3 Displacement time history curve of edge point and middle point of lossless beam
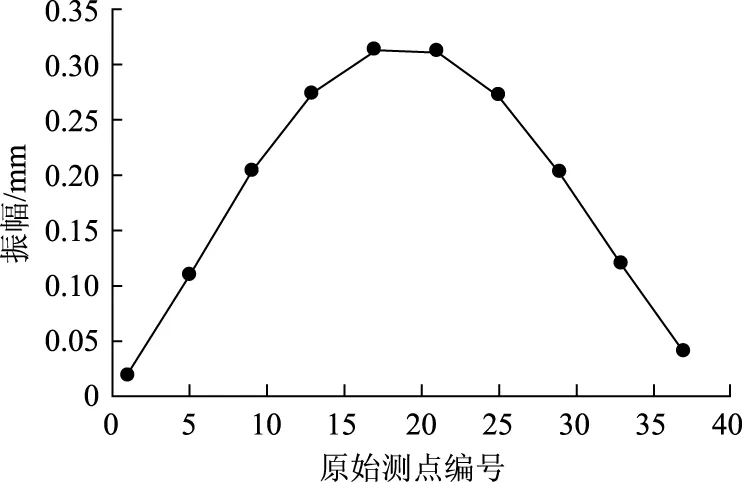
图4 无损梁的一阶振型图(测点间距10 cm)Fig.4 First mode shape of lossless beam(spacing of measuring points: 10 cm)
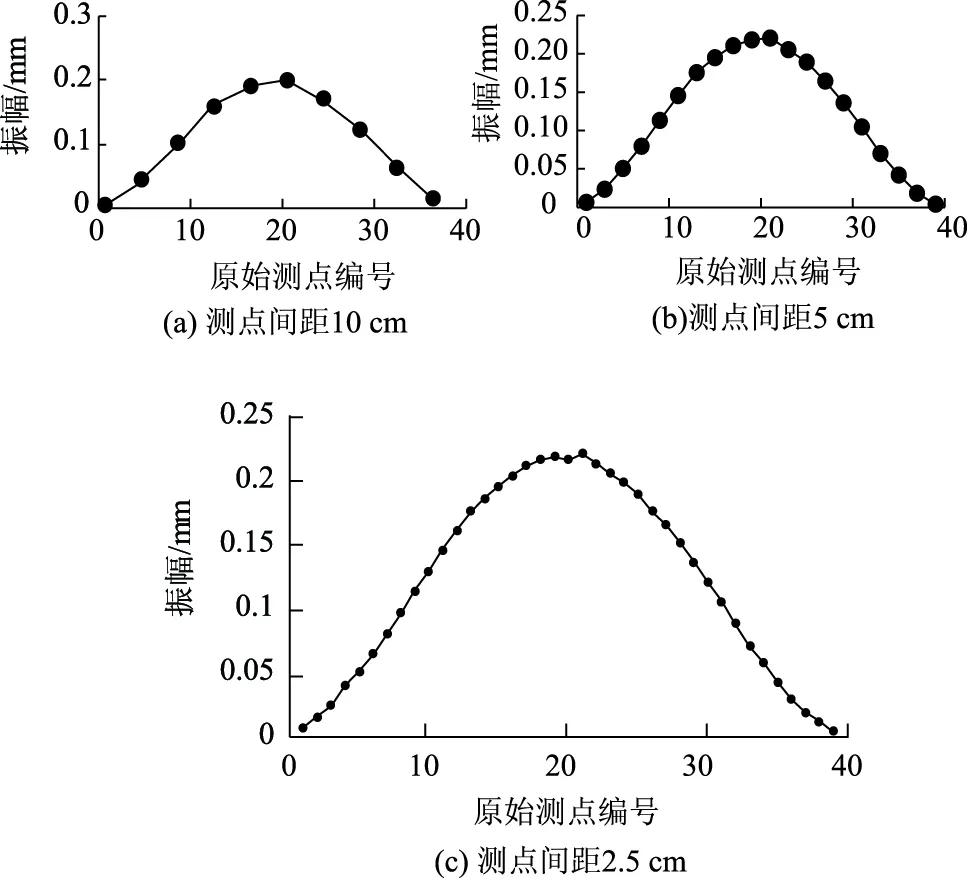
图5 有损梁的一阶振型Fig.5 First mode shape of damaged beam

图6 一阶曲率对比Fig.6 Comparison of first mode curvatures
有损梁测点间距为10,5,2.5 cm的一阶振型如图5(a)~(c)所示,有损/无损梁对应测点间距的一阶曲率模态对比如图6(a)~(c)所示。从图5、图6可见,在测点间距为10 cm和5 cm的情况下,完全看不出损伤引起的振型变化。在测点间距为2.5 cm的情况下,振型在跨中位置存在小幅突变。在测点间距为10 cm的情况下,很难根据一阶曲率判断损伤位置。在测点间距为5 cm的情况下,通过有损、无损曲率形成比对,可以检测损伤位置。在测点间距为2.5 cm的情况下,有损梁的跨中位置的曲率突变十分明显。 单独看损伤梁的一阶曲率,支座附近的曲率存在突变,容易干扰对损伤位置的判断,但是与无损梁的曲率对比可以看到,无损梁在支座附近同样存在曲率突变,二者对比之下,跨中的损伤突变就更加明显。对比曲率模态和振型图可见,对损伤检测而言,曲率比振型更敏感。
3.3 扩展分析
通过上一节的分析可以看到,测点间距为2.5 cm和5 cm时,通过有损、无损的对比,可以检测损伤位置;当测点间距为10 cm时,不易判断损伤位置。为了验证曲率模态差、曲率模态变化率对曲率突变的放大效应,采用式(6)、式(7)计算测点间距为10,5,2.5 cm的曲率模态差、曲率模态变化率,如图7、图8所示。

图7 曲率模态差Fig.7 Curvature mode difference

图8 曲率变化率Fig.8 Curvature mode change rates
从图7、图8可见,测点间距为10 cm的曲率模态差、曲率变化率都不能检测损伤。测点间距为5 cm的曲率模态差检测损伤效果不明显。同等间距下的曲率模态变化率的结果可以检测损伤,有损、无损曲率模态变化率对比检测损伤效果更好。测点间距为2.5 cm的曲率模态差、曲率模态变化率检测损伤效果都很明显。
4 结论
通过简支梁试验案例展示了图像相关法处理视频数据检测损伤位置的处理过程,在损伤程度不变的情况下,分析了不同测点间距的振型、曲率模态;计算了曲率模态差、曲率变化率对曲率突变的放大效应。结论如下:(1)结构的曲率模态在支座附近会有小幅突变,即使无损的简支梁一阶曲率模态也不是光滑的。(2)测点间距比较密的情况,损伤位置的曲率突变很大,可以检测损伤位置,但是单纯分析损伤后的曲率模态容易受到其他突变的干扰。(3)对比有损、无损2种状态,易于判断损伤位置,在实际应用时,可以将不同状态的检测结果对比分析,判读损伤的变化情况。(4)曲率模态差、曲率模态变化率对损伤突变有一定的放大效应,但是当测点间距过大,这2个指标也不能检测损伤引起的突变。由此建议:对于实桥的损伤检测,采用摄影测量法获得密集的测点动位移数据有助于通过曲率模态突变检测损伤位置。即使没有结构完好状态的曲率模态,也可定期检测曲率模态,通过对比检测损伤的变化量。
