基于无人机倾斜摄影和三维激光扫描的桥梁数字化建模方法
2022-10-27刘如飞丛波日
周 勇,刘如飞,齐 辉,丛波日,陈 敏
(1.山东高速集团有限公司,山东 济南 250101;2.山东科技大学,山东 青岛 266590;3.山东高速工程检测有限公司,山东 济南 250003;4.交通运输部公路科学研究院,北京 100088)
0 引言
实景三维作为真实、立体、时序化反映人类生产、生活和生态空间的时空信息,是新型基础测绘的标准化产品,是国家新型基础设施建设的重要组成部分,为经济社会发展和各部门信息化提供统一的空间基底[1-2]。
倾斜摄影测量技术是测绘遥感领域近年来发展起来的一项新技术,不仅可以快速获取地物不同角度的影像,直观、真实地反映实际地物的特征,而且具有效率高、成本低、灵活便捷等优点,广泛应用于各个行业[3-4]。余加勇等[5]提出了基于无人机倾斜摄影的公路边坡三维重建和灾害识别方法,利用无人机多视角序列影像重构公路边坡三维实景模型,成功应用于边坡工程灾害调查。俞建康等[6]通过无人机采集的倾斜影像实现立交桥三维实景模型重建,并选取桥梁模型上对应点位坐标与实地点坐标进行精度对比,验证了方法的可行性。但实际无人机航摄过程中存在较多盲区、遮挡等条件限制,容易造成实景三维模型存在空洞、底部拉花等模型质量问题。
三维激光扫描技术以其获取速度快、成果精度高、非接触测量、抗干扰能力强等特点成为近年来发展迅速的新型测绘技术手段,在效率和精度上均优于传统作业模式[7]。随着激光点云数据处理技术的进步,三维激光扫描技术已广泛应用于变形监测、数字城市、智慧交通等领域。朱红等[8]根据车载激光点云数据中不同地物的属性和特征,对道路点云数据进行快速分割处理并对模型进行精化,实现了道路、树和路灯等设施的三维重建。刘如飞等[9]针对车载移动测量系统数据采集特点,提出了一种基于激光扫描线索引的道路点云分类方法。通过进行扫描剖面激光点生长聚类以及行驶方向相邻多条扫描线上路边点聚类分析,最终实现了道路路面与路边特征快速提取。
综上所述,无人机倾斜摄影测量和三维激光扫描技术都具有高效率的优点,但是无人机在空中拍摄过程中会存在盲区、遮挡等客观因素限制,进而导致基于无人机倾斜摄影的建模方法存在模型拉花、空洞现象[10]。三维激光扫描技术在地面端进行数据采集,因此能够准确获取无人机拍摄盲区及遮挡区域信息,弥补倾斜摄影技术观测视角上的不足[11-13]。结合这两种技术的优势,可从不同视角保证数据质量,最大限度减少测量死角,从而全面获取完整的地物三维信息,保证模型的精度。因此本研究将无人机倾斜摄影数据与激光点云数据进行融合应用,改善倾斜实景三维建模存在的问题,并以某高速公路桥梁为研究区,进行三维融合重建及模型精度分析。
1 数据融合与建模
1.1 技术路线
无人机倾斜摄影与三维激光扫描技术的结合主要是在数据层面进行深度融合,即通过研究高精度数据配准算法,进行倾斜摄影数据与激光扫描数据的空间基准统一,然后在实景建模软件中导入融合后的点云数据,构建全视角不规则三角网,最后对三角网进行贴图处理,生成更高精度的三维融合模型。技术流程如图1所示。
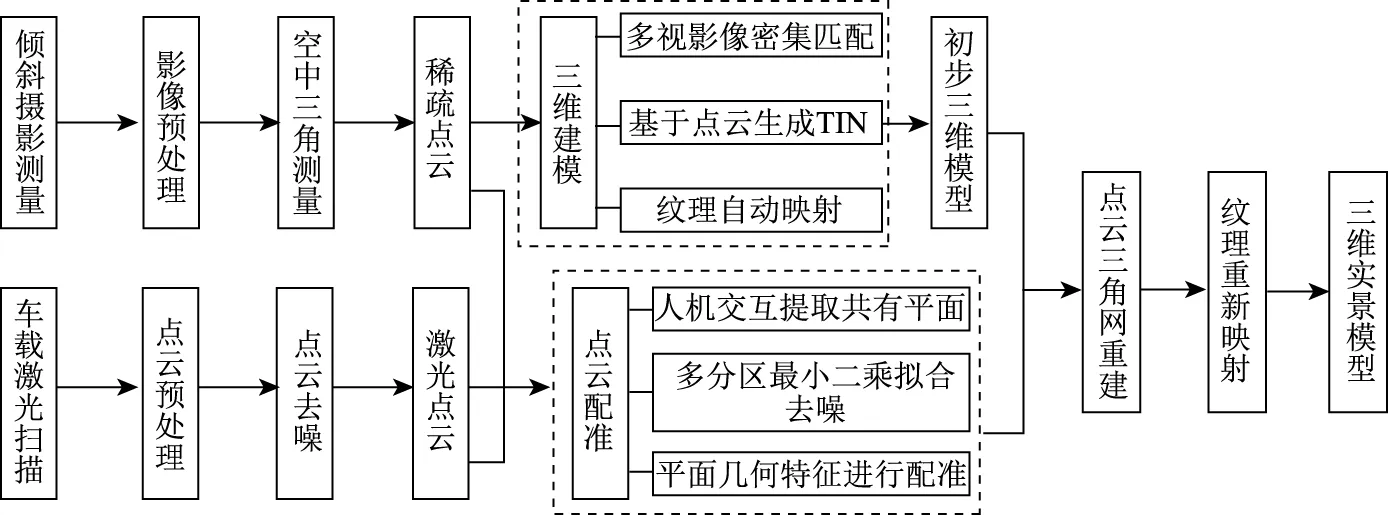
图1 多源数据融合建模技术流程Fig.1 Multi-source data fusion modeling technology process
1.2 车载点云与倾斜实景数据配准
车载点云与倾斜实景数据配准的主要目的是将车载激光点云与利用倾斜数据生成的稀疏点云进行配准融合,弥补单一数据源覆盖度的不足。由于倾斜实景原始数据为三角网格式,因此,在配准前需要将倾斜实景数据转化为密集点云,即一种由空中倾斜摄影影像密集匹配的点云数据。在数据处理时,需要对航飞影像进行照片检查、控制点刺点、空中三角测量等预处理,然后设置输出格式为三维点云,同时需根据实际需求选择合适的采样点间隔及空间参考系统,本研究设置的点间隔与参考系与车载点云一致。
点云配准应用最广泛的方法是Besl等[14]提出的ICP算法,该算法的特点是每次迭代中都将欧氏距离最近的点作为同名匹配点对,由于车载点云和倾斜点云在密度、覆盖度、点云数据质量等方面存在较大差异,同名点对一致性较差,原始的ICP算法难以达到较好的配准精度。由于桥梁构筑物场景具有较多的规则空间平面,利用同名平面进行配准可以避免从点云数据中查找同名匹配点对,提高配准精度和效率[15-16]。基于此,本研究利用一种同名平面几何特征的点云配准方法。
首先提取待配准点云中的共有平面,然后使用多分区最小二乘拟合算法进行拟合去噪并对去噪之后的点云使用RANSAC拟合平面,最后使用四元数和间接平差计算旋转平移参数,实现点云的配准。具体流程如图2所示。

图2 基于平面几何特征的点云配准流程Fig.2 Point cloud registration process based on plane geometric features
(1)多分区最小二乘拟合去噪
基于平面几何特征的点云配准,关键在于平面点云法向量和质心参数的确定,考虑到桥梁场景的点云数据量大并且包含噪点,本研究采用人工交互的方法从车载点云和倾斜点云中提取同名平面,采用空间多分区最小二乘拟合的方法对点云数据进行去噪处理。
三维空间中的任一平面点云可用式(1)进行唯一参数化表示:
axc+byc+czc=1,
(1)
式中,(a,b,c)为点云平面的单位法向量;(xc,yc,zc)为平面点云的质心,下标c为点云平面,约束条件为a2+b2+c2=1。
对于点云数据中的任意一点Pi(xi,yi,zi),以Pi为中心r为半径进行球邻域搜索,如果该球形邻域内Pi的近邻点个数小于3则将Pi点标记为离群点删除;如果近邻点个数大于3则将Pi其邻域内的点构建协方差矩阵:

(2)

求解该协方差最小特征值对应的归一化特征向量n(a,b,c),即为局部平面的单位法向量,进而可得Pi到局部平面的距离为:
(3)
遍历计算每个点到分区拟合平面距离的均值:
(4)
标准差:
(5)
当某一点Pi到局部平面的距离在(μ-σ,μ+σ)范围内时保留该点,不在该范围则定义为离群点删除。
(2)整体RANSAC拟合平面
对于去噪处理之后的平面点云数据,采用RANSAC算法进行平面拟合,其具体步骤如下:
①初始化内点点集Inpts,给定距离阈值ε、内点个数阈值mmin和迭代次数k。
②从平面点云中随机选取3个点,通过这3个点求解平面方程;假设选取的3个点为P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3),可得:
(6)
平面的单位法向量为:
(7)
已知平面的单位法向量和平面上的一点P1,可求得平面方程截距d。
③计算各点到步骤②所得平面的距离dis,若dis≤ε,则将该点计入内点,否则视为外点。
④计算该平面上内点的个数m,若m>mmin则认为此次估计成功转第⑤步,否则转第⑥步。
⑤对点集Inpts中所有点用最小二乘法重新计算平面模型的参数,得到最终结果;
⑥k=k+1,若k>kmax则结束,否则转步骤②。
(3)基于平面几何特征进行配准
设同一平面地物的几何特征在车载激光点云中表示为P(a1,b1,c1,d1,x1,y1,z1),在倾斜点云中表示为Q(a2,b2,c2,d2,x2,y2,z2),由于平面的单位法向量方向有正有负,本研究以点云质心为基准,使任一平面的法向量均朝向点云内部。
理想情况下,对于任意的同名平面特征对(Pi,Qi),都满足:
n2i=Rn1i,
(8)
式中,R为旋转矩阵;n1i=[a1i,b1i,c1i]T;n2i=[a2i,b2i,c2i]T为同名平面特征对的单位法向量。根据式(8)的描述,目标函数满足:

(9)
此时,任一同名平面之间的相对距离Δdi满足:
(10)
理想情况下,经旋转平移后的同名面完全融合,也即Δdi=0。
根据式(11)的描述,目标函数满足:
(11)
使用四元数坐标转换模型计算旋转矩阵。
由式(8)和式(10)可得:
(12)
平移向量t(tx,ty,tz)与Δdi之间的关系为:
(13)
式(11)和式(12)联立得:
(14)
由平差知识[17]得:
t=(n1iTn1i)-1n1iTΔdi。
(15)
对于配准后的任一同名平面(Pi,Qi),计算它们之间的欧式距离dPQ,则均方根误差为:
(16)
当rmse小于设定阈值时则表示配准成功,同时给定迭代次数约束,避免在均方根误差不满足设定阈值的情况下,出现无限循环迭代。
1.3 多源数据融合建模
首先需要对无人机倾斜摄影获取的影像进行检查,包括影像文件完整性、尺寸、镜头及焦距参数等;然后添加控制点并进行像片刺点,刺点位置应从控制点清晰且位于影像中心的照片中选取,完成刺点后进行空中三角测量计算,生成初步的三维模型;将经过配准的激光点云数据添加至影像密集匹配环节,实现密集匹配稀疏点云与激光扫描点云的融合,再次进行点云三角网重建,即利用全视角覆盖的点云数据构建精细的三角网白模,最后通过纹理自动映射得到融合后的三维实景模型。
2 试验与分析
2.1 数据获取
试验测区为某桥梁目标,该桥类型为简支梁桥。利用无人机倾斜摄影测量与三维激光扫描技术分别获取测区的数据。试验采用无人机获取倾斜影像数据,运用车载移动测量系统采集桥梁底部点云。
2.2 数据配准
通过C++编程实现本研究提出的基于平面几何特征的点云配准方法,为验证方法的正确性和可靠性,对无人机倾斜摄影生成的稀疏点云与车载移动测量系统获取的点云数据进行配准试验。首先选取4对互不平行的平面,然后进行去噪、平面拟合,最后进行点云配准参数计算。
基于配准参数车载激光点云和机载激光点云进行配准,配准前后点云的相对位置及局部放大图如图3所示。原始点云存在旋转、平移误差,其中旋转误差主要存在于xoy面,约30°。沿x方向的平移误差约为1.76 m,沿y方向的平移误差约为2.30 m,沿z方向的平移误差约为1.49 m。从图中可以看出,配准后的点云可较好重合,在交通标志牌位置已不存在错层现象。在配准精度分析时,人工均匀选取棱角特征明显的重叠区域[18],采用双向K近邻搜索的方式获取对应点对,计算对应点距离的均方根误差rmse作为配准的精度评定标准,其精度计算结果为4.35 cm。
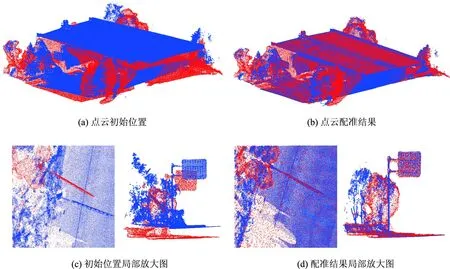
图3 点云初始位置及配准结果Fig.3 Initial position of point cloud and registration result
2.3 实景模型效果及精度
本研究首先采用Context Capture实景建模软件对倾斜摄影数据进行处理,获得初始倾斜实景模型,然后通过数据融合处理,得到融合后的桥梁实景模型。
倾斜实景模型精度取决于多种因素,主要来源于点云数据采集误差、数据融合误差和建模误差。本研究从以下3方面进行评价。
(1)对比融合前后的三维模型,观察模型纹理、结构差别,纹理越清晰、结构越明显,说明模型精度越高。倾斜摄影模型的桥梁底部存在明显拉花及空洞问题,模型细节较为粗糙。融合后的桥梁模型底部结构清晰,模型表面平整度和纹理清晰度明显改善,在结构和纹理上提高了三维模型的质量。
(2)通过分析激光点云与倾斜点云的配准误差,验证模型的融合精度,配准的误差越小,则融合模型的精度越高。配准后的点云基本重合,未出现错层现象。整体的配准精度为4.35 cm,满足高精度建模的应用要求。
(3)基于已有野外实测控制点三维坐标,从倾斜摄影模型和融合模型中识别相应检查点的三维坐标,与实测值进行比较,进行误差统计分析,误差越小模型精度越高。本研究选取桥梁附近4个检查点,将外业实测坐标作为真值,多次测量模型中的检查点坐标并取均值,与真值进行对比,结果如表1所示。

表1 检查点精度对比Tab.1 Comparison of checkpoint accuracies
3 结论
本研究针对无人机倾斜摄影建模时存在模型扭曲变形和数据空洞的问题,根据无人机倾斜摄影与三维激光扫描三维建模的优缺点,提出了一种无人机倾斜摄影与三维激光扫描结合的桥梁三维数字化还原方法,并形成了一套可行的数据融合建模方案,包括数据采集、倾斜与激光点云配准、实景融合建模等,从多个方面验证了融合模型精度。试验表明,该方案提高了三维模型的精度,改善了桥梁三维模型的局部纹理细节,具有较好的可行性。
