肩关节全驱动上肢康复机器人的设计与分析
2022-10-21王占礼段志峰高墨尧庞在祥
王占礼 段志峰 李 爽 高墨尧 庞在祥
(长春工业大学 机电工程学院, 吉林 长春 130012)
0 引言
随着人口老龄化的加剧、生活节奏的加快以及不良饮食习惯的影响,因脑卒中造成肢体运动障碍的人口迅速增长。脑卒中作为发病率高、复发率高、致残率高、死亡率高的脑血管疾病,正以每年300多万人的速度增长;患病的存活者中,约80%会留有不同程度的肢体功能障碍[1-5]。医学和临床实践表明,治疗脑卒中最有效的方法就是治疗后转为反复的康复训练。传统的康复治疗一般是通过治疗师与患者面对面、长时间的接触来帮助患者进行肢体上的反复运动,从而达到康复治疗的效果。这种治疗往往过于依赖治疗师的自身治疗经验,并且现阶段治疗师数量与患者的数量相差较大,存在康复治疗效率低、成本高、操作难度大且不易随时进行的缺点。上肢康复机器人的出现弥补了以上缺点,将机器人技术与康复医学相结合,可使治疗效果事半功倍。
随着康复医疗技术与人工智能技术的不断发展,针对上肢运动功能障碍治疗的康复机器人正成为研究的重点,国内外众多学者及相关单位都对其进行了大量的研究,并取得了一些成果。国外研发的具有代表性的产品有:Lünenburger L 等[6]开发的基于跑步机的外骨骼式康复机器人Lokomat,由Colomer C等[7]研制的可提供手臂减重系统、增强表现反馈和评估工具的Armeo 机器人,Nef T 等[8]开发的具有6 自由度半骨架结构的ARMin 机器人等。国内研发的具有代表性的产品有:Huang X 等[9]研发的10 自由度上肢外骨骼康复机器人,李庆玲等[10]研发的5自由度康复机械臂系统,以及与肩关节转动中心相匹配的新型上肢康复机器人等[11-13]。
目前,对上肢康复机器人的研究逐渐向外骨骼式康复机器人方向发展,通过机器人运动带动患者上肢运动来达到康复训练的目的。其中,大部分的外骨骼式康复训练机器人运动形式单一、结构质量大,康复运动存在局限性,康复周期长,很难对患者进行有效的康复训练。因此,本文中在深入了解上肢康复机理的前提下,基于人体解剖学与人机工程学理论,设计了一种5自由度肩关节全驱动上肢外骨骼康复机器人,可实现肩关节的内收/外展、前屈/后伸、旋内/旋外运动,肘关节的屈伸运动及腕关节的桡屈/尺屈运动。建立了该上肢康复机器人的运动学和动力学模型,推导了其运动学和动力学方程,应用Adams 对该上肢康复机器人进行仿真分析,分析了其工作空间,为进一步的研究提供理论依据。
1 上肢康复机器人结构设计
从人体解剖学的角度看,人体上肢主要包括肩、肘、腕3个关节。肩关节作为人体关节中活动范围最大的关节,可作为3轴进行运动,主要的运动功能由盂肱关节实现,其由肱骨头和肩胛骨关节盂构成,属于球窝关节,支撑整个肩部,维持人体重心。肩关节构型如图1所示。
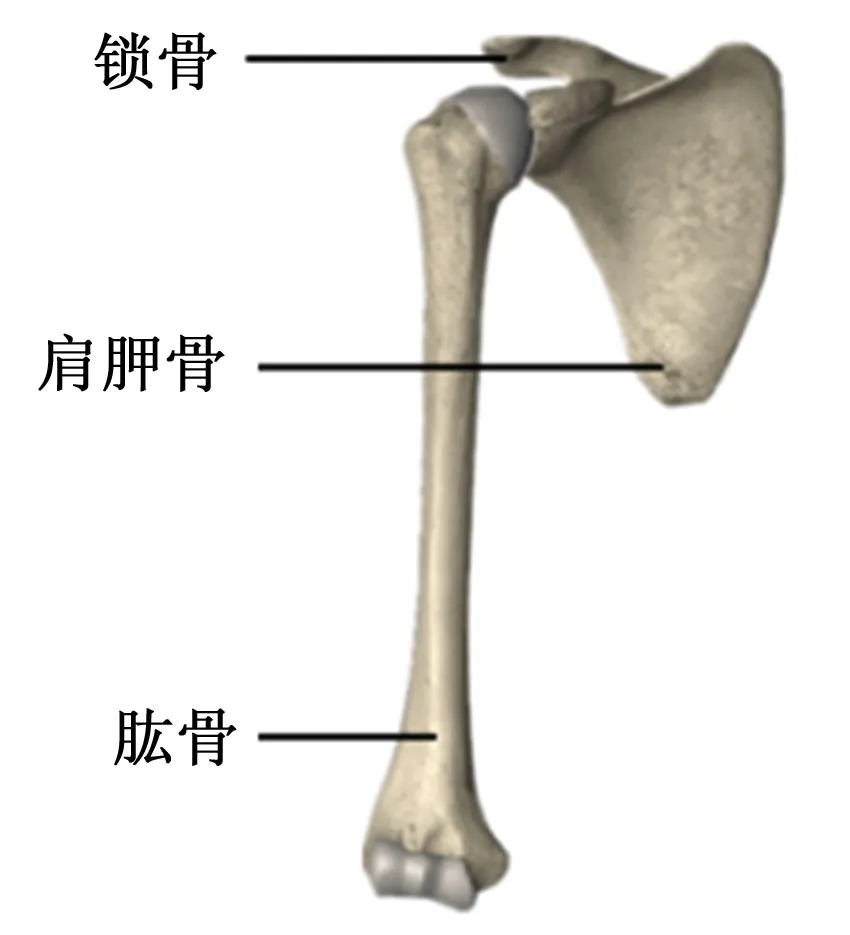
图1 肩关节构型Fig.1 Shoulder joint configuration
本文中所设计的5自由度上肢康复机器人整体结构如图2所示。其中,肩关节的3个自由度均为被动自由度,每个主动关节对应1个驱动模块的全驱动方式,通过外骨骼机器人带动患者肢体进行运动。相比欠驱动方式,全驱动机器人的优势在于可以提供单关节的康复训练、工作空间与人体运动空间更接近。肘关节和腕关节分别有1个自由度,均为主动自由度,患者可自行运动并带动外骨骼机器人进行运动。

图2 上肢康复机器人整体结构示意图Fig.2 Schematic diagram of the overall structure of the upper limb rehabilitation robot
以人体右臂为例,建立人体上肢各关节运动自由度的模型如图3 所示。对应人体上肢自由度分别是:肩关节的内收/外展(J1)、旋内/旋外(J2)、前屈后伸(J3);肘关节的屈曲/伸展(J4);腕关节的桡屈/尺屈(J5)。
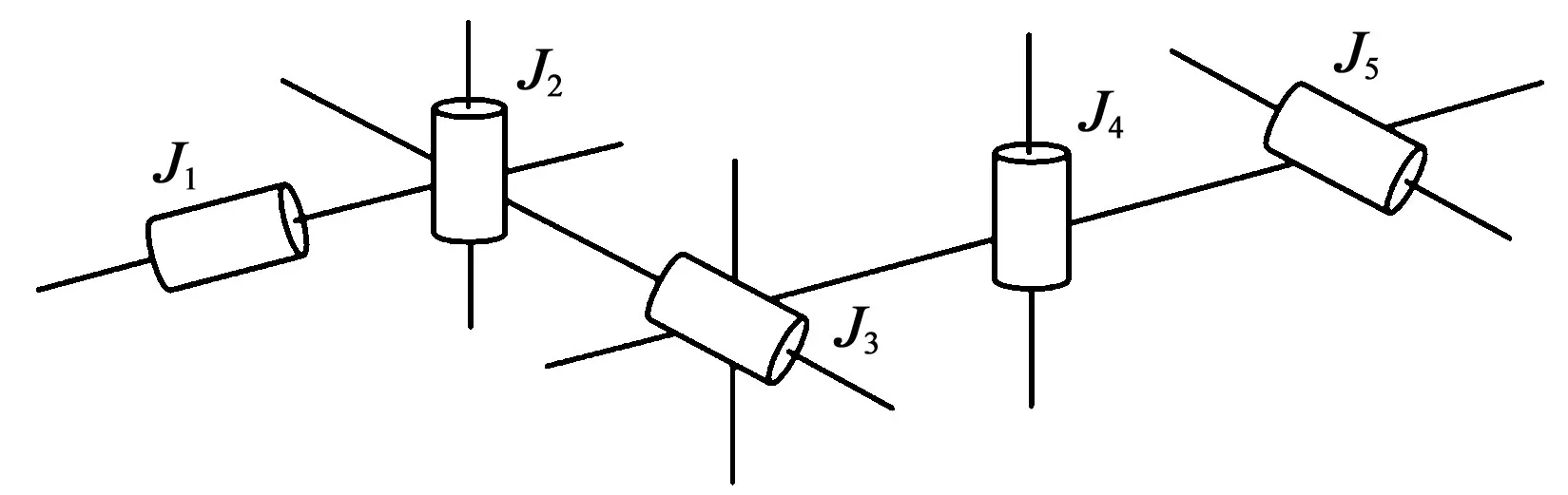
图3 机器人自由度简图Fig.3 Schematic diagram of degrees of freedom of robots
人体上肢各项尺寸与关节参数依据GB 10000—88《中国成年人人体尺寸标准》[14]1-14来设计,人体上肢关节运动范围及机器人运动范围如表1所示。
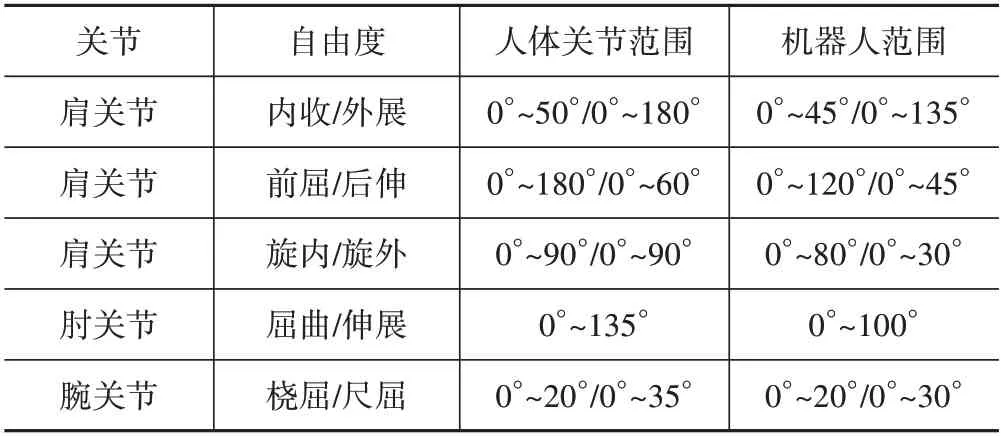
表1 人体上肢关节运动范围及机器人运动范围Tab.1 Range of motion of the upper limb joint of the human body and the range of motion of the robot
上肢康复机器人肩关节结构如图4所示。肩关节的3个自由度分别为前屈/后伸、内收/外展、旋内/旋外,3个自由度回转中心交于肩关节一点,与人体上肢肩关节结构相匹配,可以完成X轴、Y轴、Z轴3个方向的转动。
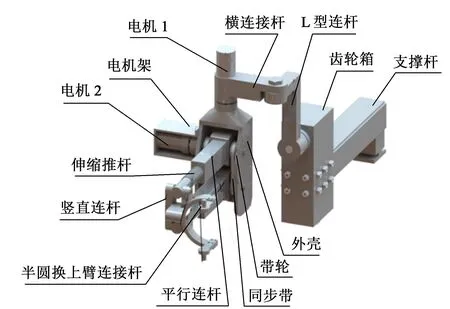
图4 肩关节结构示意图Fig.4 Schematic diagram of shoulder joint structure
肩关节前屈/后伸自由度采用平行连杆结构,平行连杆末端连接伸缩推杆。其中,伸缩推杆上端与连杆固定相连,伸缩推杆下端与连杆套接,可以相对滑动,既能保证上臂结构的强度,又减小作用力,通过电机驱动同步带轮实现平行连杆在矢状面上的运动,如图5所示。

图5 肩关节前屈/后伸结构示意图Fig.5 Schematic diagram of shoulder joint flexion/extension structure
肩关节内收/外展自由度如图6 所示。传统的康复机器人在进行肩关节内收/外展运动时,需要配合运动才可完成;而该设计可以提供单关节的康复训练,通过电机驱动锥齿轮传动可直接完成该自由度的运动。齿轮箱固定在后部支撑杆,大大减轻了整体机械结构的质量。肩关节旋内/旋外运动如图7 所示。机器人整体结构更为简便,减小了装置与人体之间的干涉,提高了空间利用率,使整体结构更为紧凑。

图6 肩关节内收/外展结构示意图Fig.6 Schematic diagram of shoulder joint adduction/abduction structure
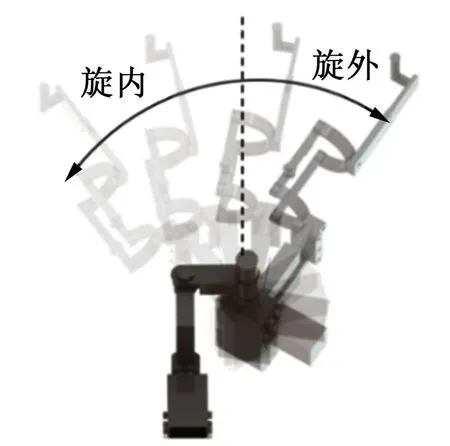
图7 肩关节旋内/旋外结构示意图Fig.7 Schematic diagram of shoulder joint internal rotation/external rotation structure
整个上肢康复系统由康复机器人和基座两部分组成。患者在康复过程中,手臂与机器人末端接触,上肢通过机器人驱动牵引机构完成肩关节的主被动康复训练和肘、腕关节的主动康复训练。基座可根据不同人体的高度进行调整,以适应患者体型的差异及不同的康复治疗环境。
2 运动学分析
2.1 正运动学分析
为得到上肢康复机器人相邻杆件之间的平移旋转关系以及末端位姿,本文中采用D-H 坐标系法建立上肢康复机器人的D-H 参数模型,如图8 所示。其中,D-H模型参数如表2所示。
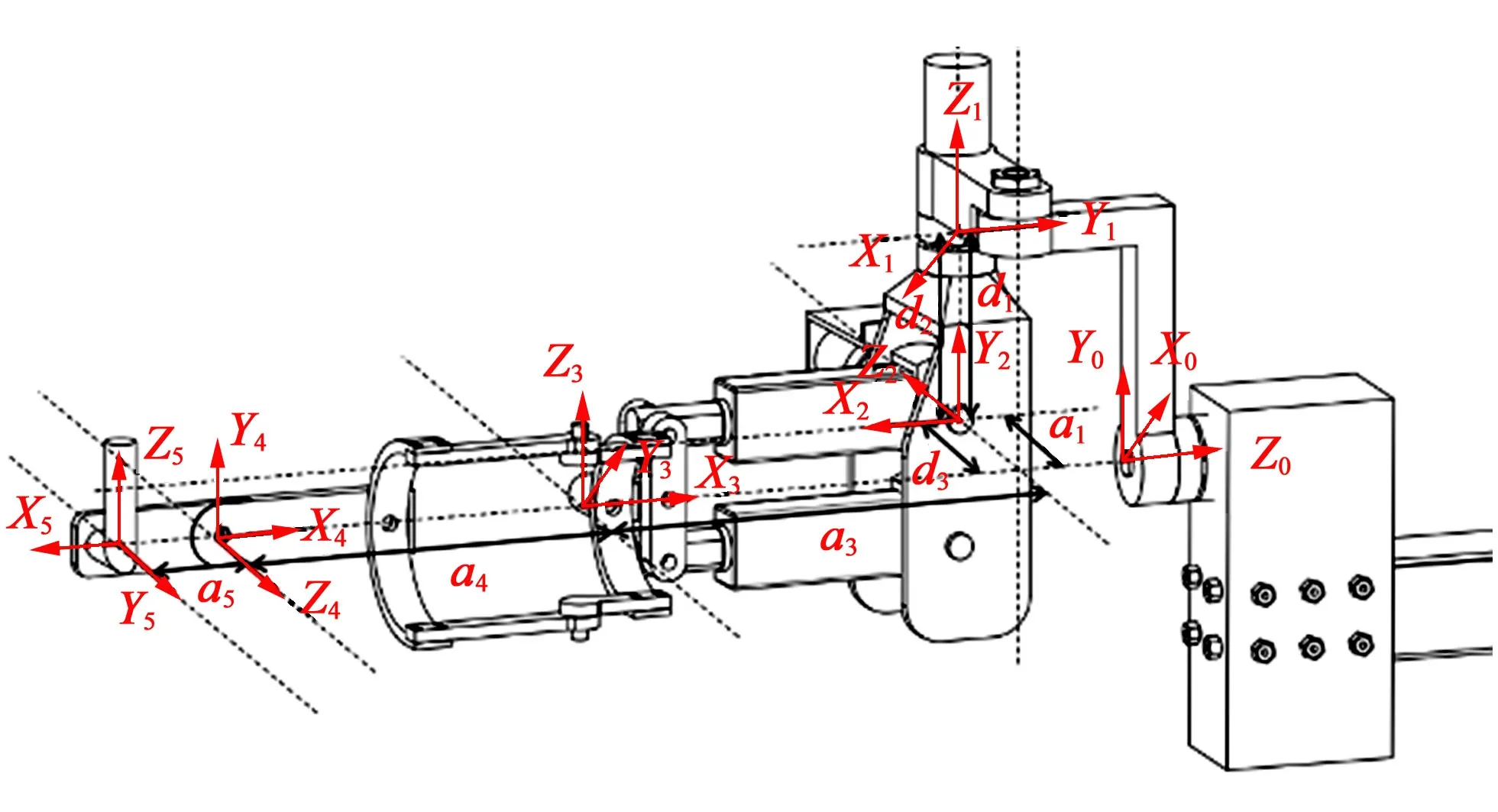
图8 上肢康复机器人D-H参数模型Fig.8 D-H parameter model of upper limb rehabilitation robots
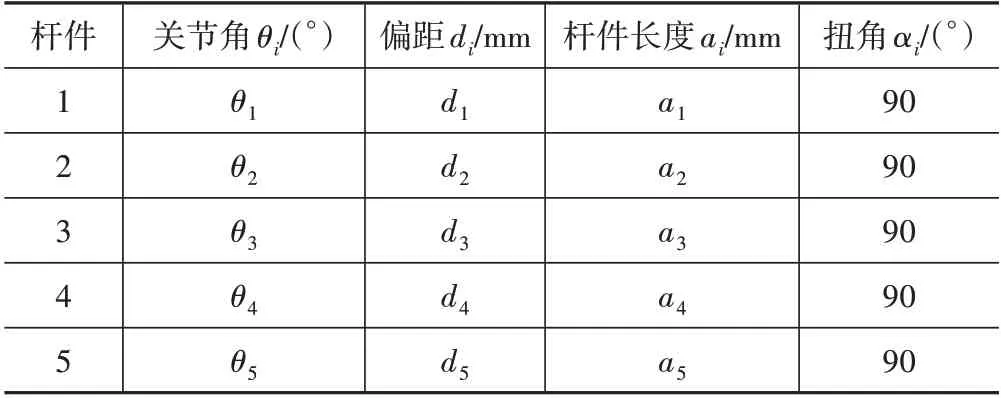
表2 上肢康复机器人D-H参数表Tab.2 D-H parameter table of upper limb rehabilitation robots
利用坐标系变换,实现坐标系{Oi-1}到坐标系{Oi}之间的坐标变换。相邻坐标系{Oi}和{Oi-1}间的坐标变换为
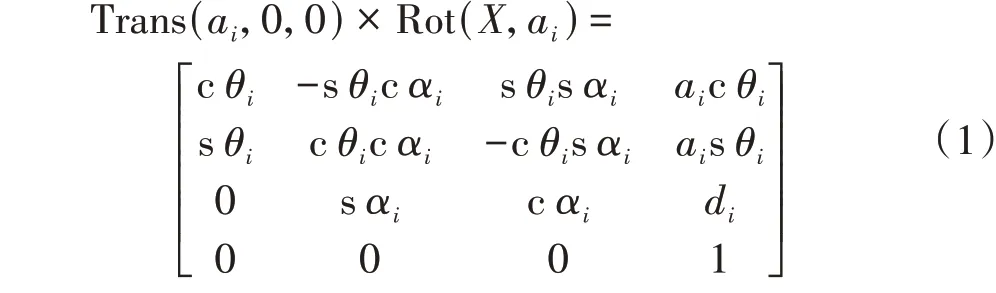
式中,cθi= cosθi;sθi= sinθi;cαi= cosαi;sαi=sinαi;i-1Ti=Ai= Rot(Z,θi)× Trans(0,0,di)。
末端手握把处坐标系相对于基座坐标系的位姿矩阵可以表示为

将上肢康复机器人的初始参数代入式(2),得机器人末端初始位姿与机器人三维模型的初始位置一致,由此验证了上肢康复机器人正运动学求解的正确性。
2.2 逆运动学分析
机器人的逆运动学是机器人运动学的一个重要组成部分,是进行机器人轨迹规划的前提和基础,通过已知机器人末端位姿,求解各个关节变量。在众多的逆运动学求解方法中,本文中采用代数法进行求解。
机器人末端齐次变换矩阵为
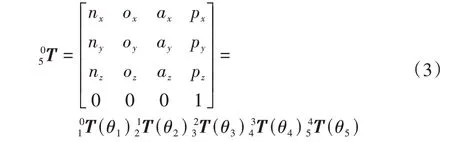
由于简化了机器人运动模型,对基座的运动学不做分析。设θ1为已知量,通过逆解上述矩阵,分别得到关节角θ为

将上肢康复机器人的末端变量相应位置的点代入式(3)中,得到相应各关节的理论旋转角度,这与三维模型中各关节转角一致,由此验证了上肢康复机器人逆运动学求解的正确性。
3 动力学分析
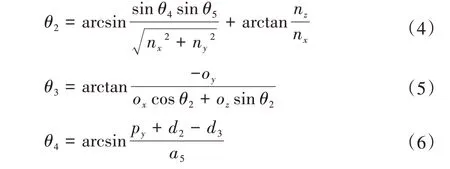
为了验证上肢外骨骼康复机器人的力学性能是否能够满足关节训练的要求,对上肢康复机器人进行动力学分析计算。本文中采用拉格朗日方程法,计算出自变量为笛卡尔坐标的广义动力学2阶微分方程。对上肢康复机器人进行简化分析,可将其简化为如图9 所示的机构。其中,L1、L2、L3分别为上臂、前臂和小臂。
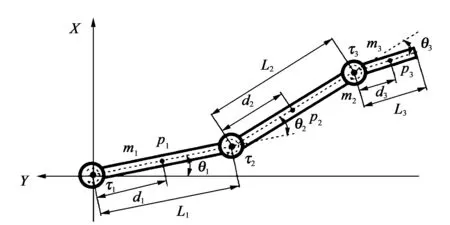
图9 上肢康复机器人动力学模型Fig.9 Dynamic model of upper limb rehabilitation robots
图9 中,设连杆1、连杆2 和连杆3 的关节变量转角分别为θ1、θ2和θ3,对应关节1、关节2和关节3的力矩分别为τ1、τ2和τ3,3 个杆的质量分别为m1、m2和m3,3个杆的质心分别为p1、p2和p3,质心距离关节转动中心的距离分别为d1、d2和d3。
上肢康复机器人的拉格朗日方程的标准形式为

式中,τi为各关节的关节力矩;q̇i为角速度或线速度;n为连杆数量。
拉格朗日方程中,动势算子L为

式中,K为动能函数;P为势能函数。
4 运动学与动力学仿真分析
4.1 人体关节力矩分析
人体上肢质心分布如图10 所示,对人体解剖学数据的研究[15]。图10 中,上臂质心c1与上臂近端距离L1约为上臂长度Lu的43.6%,前臂质心c2与前臂近端距离L2约为前臂长度Lf的43%,手臂质心c3与手部近端距离L3约为手长Ls的46.8%;根据国家标准GB 10000—88[14]1-4,取中国成年男性体质量80 kg,手部长为202 mm,小臂长为268 mm,上臂长为349 mm。上肢关节所受重力产生的关节力矩Tg为
图10 人体上肢质心分布Fig.10 Distribution of the center of mass of the upper limbs of the human body
Tg=m1gL1+m2g(Lu+L2)+m3g(Lu+Lf+L3)= 14.31 N·m
由于人体上肢质量分布不均匀,所以,给出的表达式为一个范围而不是准确值。
4.2 可行性和稳定性验证
为了验证所设计的上肢康复机器人的可行性及所建模型在运动过程中的平稳性,利用Adams 软件建立机器人的虚拟样机,根据运动学与动力学方程的计算结果,添加惯性参数、重力项参数以及由人体上肢重力产生的力矩,选取机器人各关节转矩和末端质心作为测量对象,整个运动时间设置为10 s。仿真得到各关节转矩、末端质心的位移、角速度、角加速度曲线如图11所示。

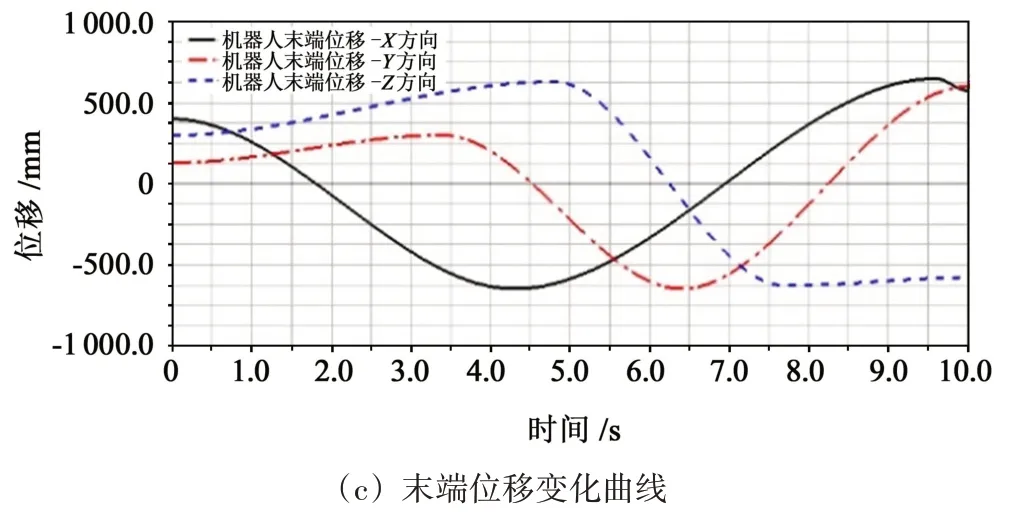
图11 上肢康复机器人Adams仿真曲线Fig.11 Adams simulation curve of upper limb rehabilitation robots
图11(a)所示为各关节运动时转矩随时间变化曲线,图11(b)所示为机器人末端角速度、角加速度随时间变换曲线。在图11(a)中,Joint1、Joint2、Joint3 为肩关节3 个自由度运动过程中的转矩变化曲线,Joint4 为肘关节运动时的转矩变化曲线。整个运动过程中,曲线较为平滑,关节转矩波动不大,最后逐渐趋于平稳。其中,肘腕关节运动时所需转矩很小,所以曲线几乎无变化。图11(c)为末端位移随时间变化曲线,由曲线可知,机器人运动过程中在X、Y、Z方向上所能达到的最大位移分别为708 mm、715 mm、550 mm。
仿真结果表明,机器人在整个运动过程中较为平稳,末端运动轨迹连续无间断,曲线在运动阶段无任何突变且曲线的变化符合实际。因此,所设计的上肢康复机器人合理且稳定性良好,机构之间无干涉。
4.3 康复过程便捷性验证
为验证所设计的上肢康复机器人在进行肩关节内收/外展运动时所需时间小于机器人配合运动完成所需要的时间,选取完成肩部内收/外展运动的关节作为测量对象,设置仿真时间为16 s,以恒定角速度运动,仿真过程如图12 所示。图12(a)所示为肩关节内收/外展自由度配合完成时的运动过程,从初始状态经旋外90°到达手臂展开状态,经内收30°后反向旋转90°。图12(b)所示为肩关节内收/外展自由度直接完成时的运动过程,从初始状态直接内收30°再反向旋转90°。

图12 肩关节内收/外展运动仿真过程示意图Fig.12 Schematic diagram of the simulation process of shoulder joint adduction/abduction movement
仿真曲线如图13 所示,曲线1 为配合运动时角度随时间的变化,前4 s 内为手臂打开的过程,机器人在内收/外展方向上并没有运动;曲线2、曲线3为肩关节内收/外展运动直接完成时角度随时间变化曲线。由图13中可知,在肩关节内收/外展运动到相同角度时,所需时间相较配合完成该运动减少4 s,而达到相同的运动时间,内收、外展运动角度分别增加15°、10°。因此,所设计的上肢康复机器人在肩关节内收/外展运动上更为方便,提高了康复效率。
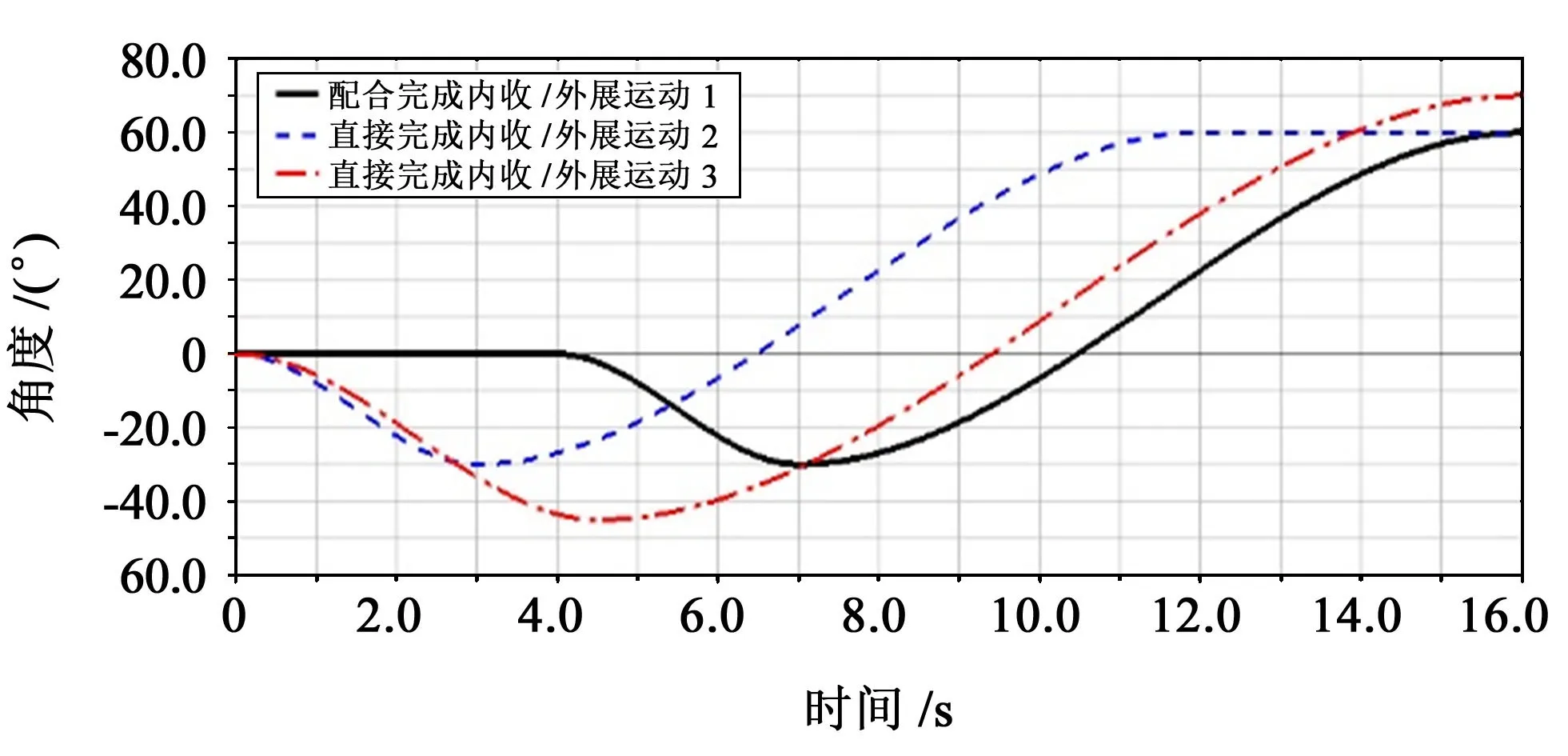
图13 内收/外展运动角度随时间的变化曲线Fig.13 Change curve of adduction/abduction motion angle with time
5 工作空间分析
机器人的工作空间是机器人进行康复训练的过程中,上肢在空间中所能达到的最大运动范围,是衡量康复机器人设计是否合理的重要依据。本文中应用蒙特卡洛法,结合运动学方程和各关节角的运动范围,利用Matlab 编程,得到机器人仿真结果如图14所示。
由图14 中可知,上肢康复机器人在X轴和Y轴的工作半径相同,均为733 mm,在Z轴的工作半径为559 mm,与运动学仿真所求得最大位移接近。根据人体工程学可知,我国中等人体手臂平均长度为742 mm,表明机器人运动的极限位置与人体上肢动态极限位置非常接近。因此,所设计的上肢康复机器人满足上肢康复需求。
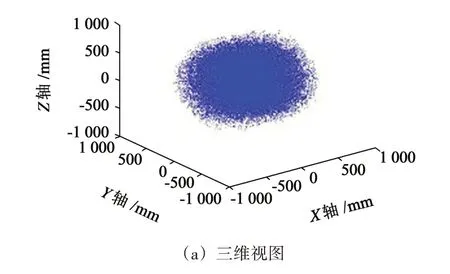
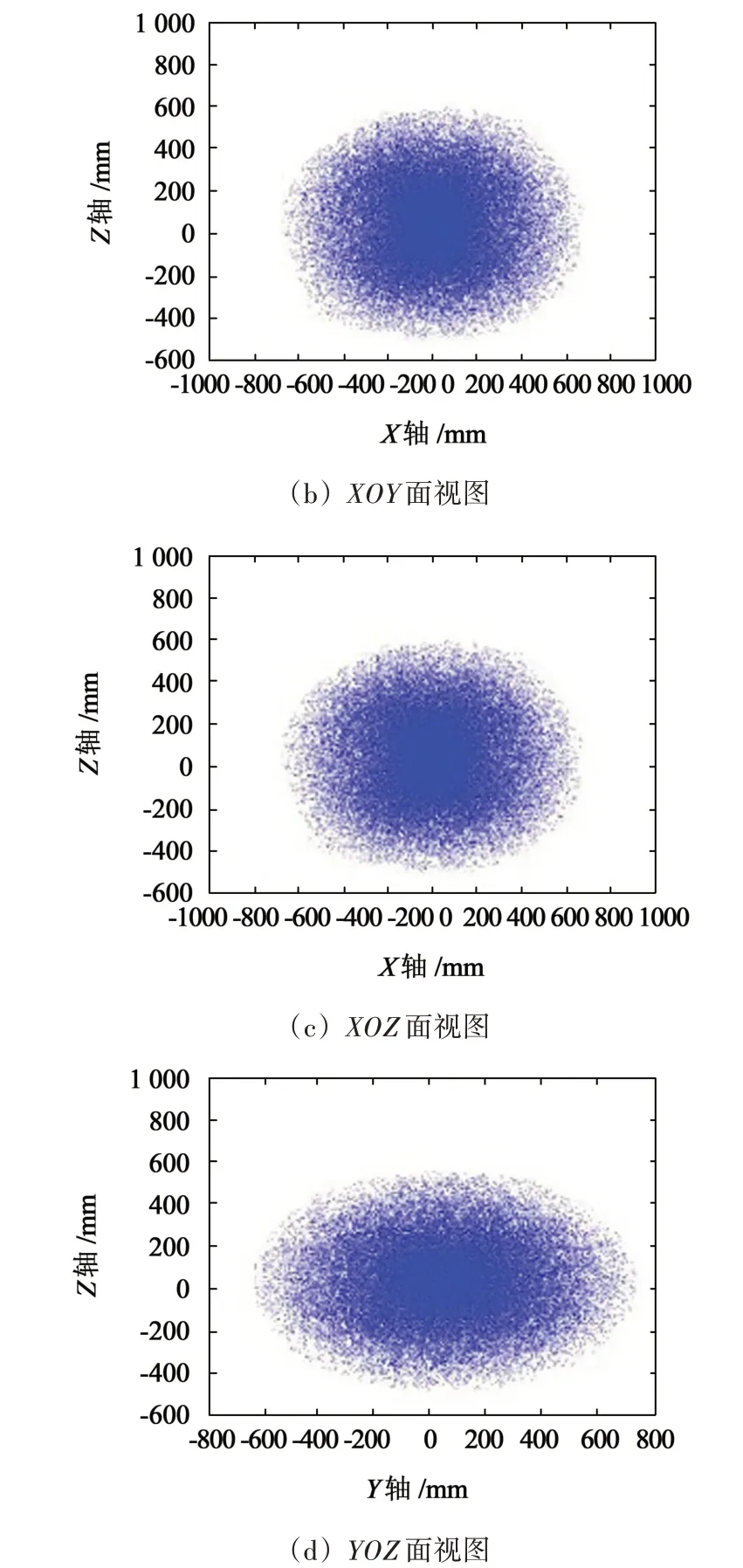
图14 机器人工作空间仿真图Fig.14 Robot workspace simulation diagram
6 结论
提出了一种肩关节全驱动式上肢康复机器人,设计肩、肘、腕3个关节的结构,实现康复机器人的康复训练运动;建立机器人的运动学和动力学参数模型,推导运动学方程;应用Adams 建立康复机器人的虚拟样机并进行了仿真。结果表明,机器人在整个运动过程中平稳,运动轨迹波动较小且连续无间断,无突变产生;对比分析肩关节内收/外展两种运动方式,该设计在相同运动角度可减少运动时间;分析机器人的工作空间,得到的运动空间与人体上肢运动范围接近,由此验证了所设计的上肢康复机器人的合理性。
