基于方位特征集的飞机侧开式登机舱门开启机构变模式运动分析
2022-10-21吴柏锐杭鲁滨彭继友黄晓波裘旭东
吴柏锐 杭鲁滨,2 彭继友 黄晓波 吴 扬 裘旭东
(1 上海工程技术大学 机械与汽车工程学院, 上海 201620)
(2 上海市大型构件智能制造机器人技术协同创新中心, 上海 201620)
(3 上海飞机设计研究院, 上海 201210)
0 引言
飞机登机舱门作为大型客机的一个重要部件,其功能与运动模式分析对飞机舱门机构设计至关重要[1]。飞机客舱登机门开启具有多种形式,包括门梯合一下翻式、内收旋转开启式以及侧开式等。
国际上较早期的伊尔86/96[2]客机采用了门梯合一下翻式登机门,但是,由于其内设扶梯的结构占用空间较大,现在的运输客机已经不再使用[3]。早期波音B737 的客机登机门采用内收旋转开启的方式[4],舱门向内运动一定角度后再向外翻转打开,开启形式较复杂且由于上下两端增设额外密封板,密封性能较差。
如今使用较多的客机如波音B777、空客A320等均采用侧开式登机门[5]。飞机侧开式登机舱门机构具有增压释压、释放安全滑梯、阵风锁等多种功能。侧开式登机门由于其多元化的功能、简易的开启方式以及节省空间等特性得以在新机型上广泛应用[6]。
国内学者在参考国际上现有成熟机型的基础上进行了进一步研究。黄振庭[7]对内收旋转开启式的ARJ-21 客机门进行了动力学分析和参数优化设计。许清清[8]对ARJ-21 应急门进行了机构仿真与优化。商飞公司设计的C919 登机门则有舱门导向槽机构方案的设计及仿真优化[9]、门闩机构的设计思路[10]、舱门提升原理的参数化分析[11]等。由以上文献可知,目前的大多研究都是围绕具有独立功能的机构设计方案进行分析,未见从舱门机构整体协同性方面开展的运动分析。
历史上,飞机舱门曾出现过舱门机构错位或磨损较大的情况,导致舱门开启困难或关不紧,影响了航班正常起飞[12]。机构之间的关联性会导致构件损坏,例如,航空轴承磨损往往是因为其他构件之间的连接出现偏移或变形而导致作用力增加。因此,从舱门机构整体关联性来分析舱门运动形式至关重要。
参考现有侧开式登机门方案及变模式机构研究[13-17],本文中基于方位特征集理论,分析了舱门开启机构运动的输入输出关系及提升过程和旋转过程的运动模式;使舱门驱动具有挡块限位,保证舱门机构模式切换的几何约束条件恒定及开启过程的稳定性;试验验证了飞机舱门设计模式切换的可行性。采用方位特征集研究舱门开启过程,为舱门设计提供了新思路。
1 飞机舱门开启机构分析
飞机侧开式登机舱门运动过程分为抬升过程和舱门旋转过程。从机构学角度和舱门机构整体运动协同性分析舱门抬升过程和舱门旋转过程的运动模式切换方式。
飞机侧开式登机舱门开启机构由铰链臂机构、平行杆机构组成,如图1所示。
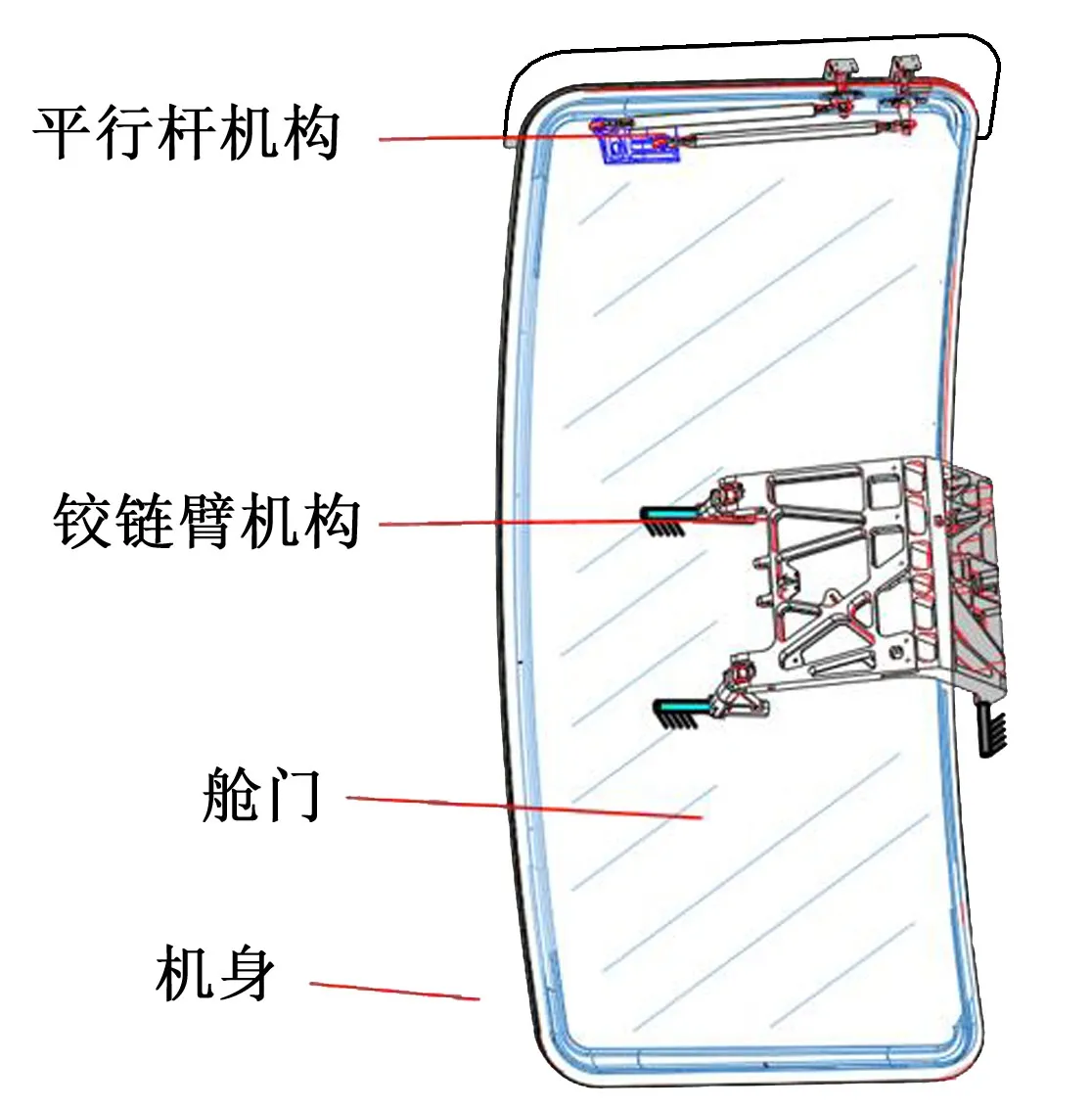
图1 飞机侧开式舱门开启机构示意图Fig.1 Sideward opening aircraft door mechanism
飞机侧开式登机门通过上、下摇臂连接在铰链臂上。平行杆机构由4个球铰链组成,分别连接在舱门顶端和机身上。平行杆机构和铰链臂机构作为舱门开启的运动支链共同作用。其机构简图如图2所示。

图2 飞机侧开式舱门开启机构简图Fig.2 Schematic diagram of sideward opening aircraft door mechanism
如图3所示,铰链臂机构是登机门中非常重要的结构承力构件。铰链臂结构由上摇臂和下摇臂以及固接在机身框上的上、下支座组成。铰链臂机构一端与机身上、下支座铰接,一端的上下摇臂与门提升机构铰接。登机门开启后,整个舱门的质量由铰链臂支承。在登机门开闭过程中,铰链臂机构会承受由舱门重力引起的较大转矩,并通过固接在门框上的上下两个支座传递到机身结构上[18]。
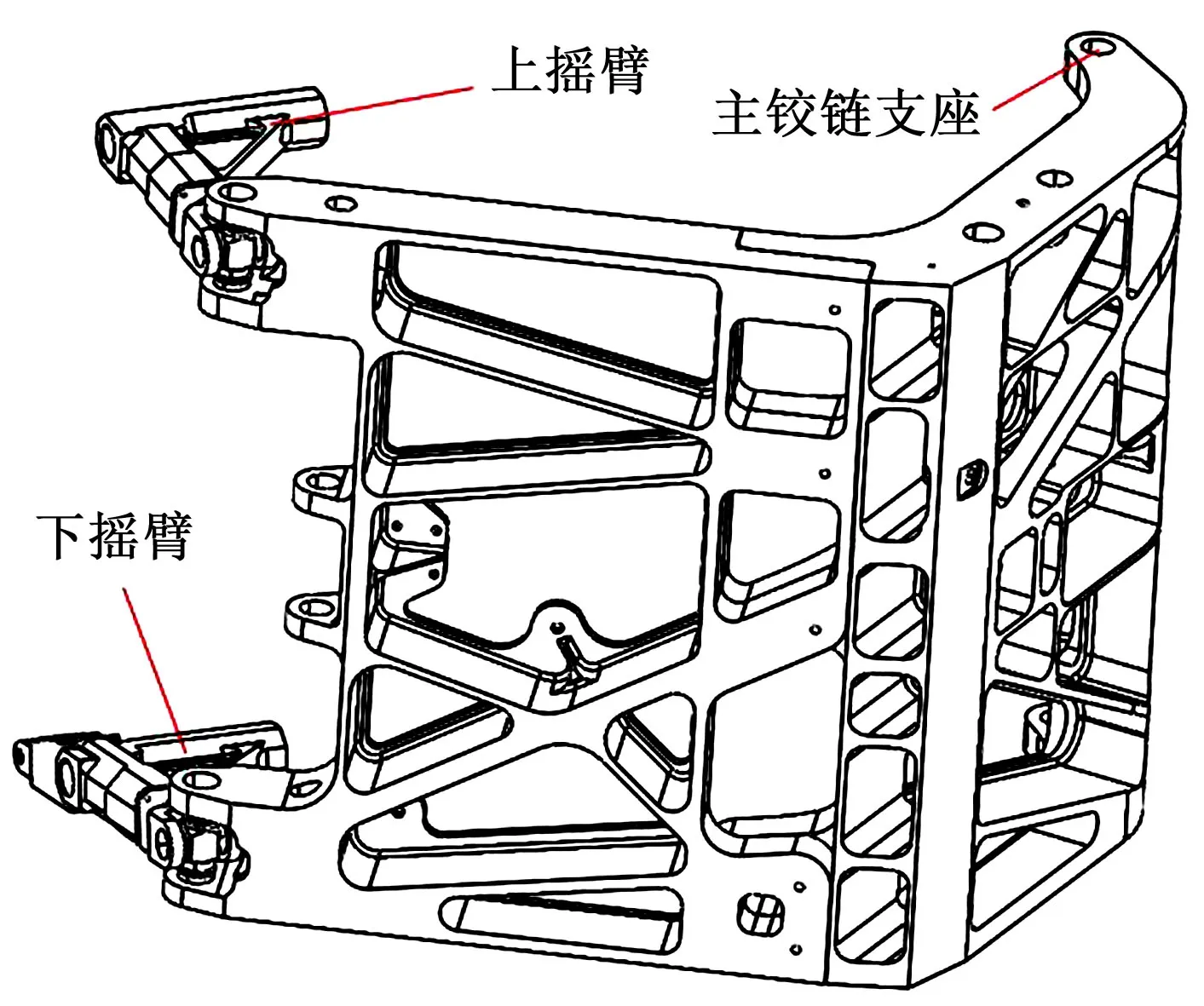
图3 铰链臂机构Fig.3 Hinge arm mechanism
如图1、图4 所示,平行杆机构的两根杆长度相等且互相平行,控制舱门开启过程的平动运动,实现舱门平行于机身移动。

图4 平行杆机构Fig.4 Parallel link mechanism
2 舱门支路组合、运动自由度分析
2.1 舱门并联机构运动自由度计算
机构拓扑结构特征决定了机构的运动特征与动力学特征。通过将飞机舱门开启机构抽象为并联机构动平台来分析舱门运动模式,杨廷力[19]揭示了机构尺度约束类型、机构拓扑结构、独立位移数三者的内在联系形成的方位特征(POC)集理论,创新性地提出了一种体现机构输入输出特征的自由度计算公式,即
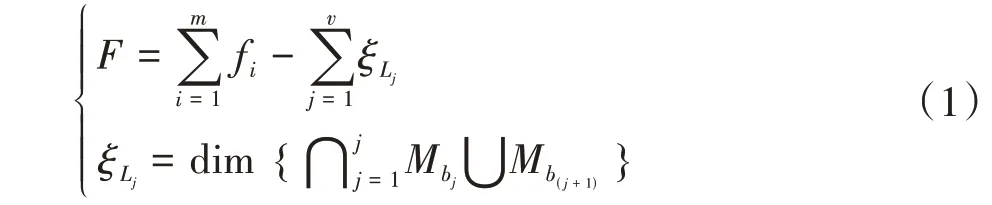
式中,F为机构自由度,fi为第i个运动副的自由度;ξLj为第j个独立回路的独立位移方程数;Mbj为第j条支路末端构件的POC集。
本文中结合实际舱门开启机构的支路组合,对舱门开启过程自由度及运动模式进行了分析。舱门方位特征集计算过程为:
(1)确定舱门开启机构各支链拓扑结构
舱门开启机构支路的结构组合为:①2条S-S串联支路;②1条由转动轴互相垂直的4R回路与2R串联支路。3条支路拓扑结构分别为
SOC{-Sa-Sb-}
SOC{-Sc-Sd-}
SOC{-R1//R2//R3//R4⊥R5//R6-}
动平台、静平台拓扑结构及几何尺度约束类型分别为:①飞机舱门(动平台)连接副有R2、R3、Sa、Sd。其中,R1//R2//R3//R4;杆长l12≠l34。②飞机机身(静平台)连接副有R6、Sc、Sb。其中,R6//R5,R6⊥R2;Sc、Sb球副中心连线与Sa、Sd球副中心连线平行且等长,即:lab=lcd,AB//CD。
(2)确定第一个回路末端构件的POC集
将RR 副的POC 集代入串联机构POC 集方程,得到第一个回路R1、R2、R3、R4的支路末端构件POC 集为
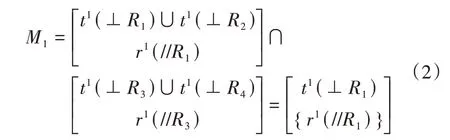
回路由SOC{-R1//R2-}和SOC{-R3//R4-}并联再与SOC{-R5//R6-}串联而成。其中,R5、R6轴线互相平行;存在1 个非独立转动r1(//R1)和1 个独立移动t1(⊥R1)。
SOC{-R1//R2//R3//R4⊥R5//R6-}可用其等效单开链SOC{-P1⊥R5//R6-}替代,将各支链POC 集代入计算得到
式中,末端构件存在1个独立转动r1(//R6)、1个非独立转动r1(//R1)和两个独立移动t1(⊥R6)、t1(⊥R1)和1个非独立移动t1(⊥R5)。
(3)确定第二支路、第三支路组成回路的独立位移方程数ξL1
球副的尺度约束类型可近似为3个轴线相交于一点的转动副。若同一构件有两个S副,则两个S副球心连线方向存在一个局部转动自由度,故将SS 副等效为SU 副,得其第二支路、第三支路并联支路拓扑结构为
由第二支路、第三支路组成的第一个独立回路的独立位移方程数ξL1为
由自由度公式可得其子并联机构DOF为

考虑到杆长lab=lcd且AB//CD,第二支路、第三支路组成的子并联机构动平台的POC集为

(4)确定第二个独立回路的独立位移方程数ξL1
由第二支路、第三支路组成的子并联机构与第一支路确定的第二个独立回路的独立位移方程数为
(5)确定机构自由度
3条支路组成的子并联机构DOF为

(6)确定并联机构动平台的POC集
计算并联机构POC集,可得
由式(10)得到并联机构的DOF 为1,故舱门开启机构POC 集只能有1 个独立元素。结合舱门运动规律可知,舱门运动有舱门提升和旋转平动两种模式,在不同运动阶段的主要运动方式也不相同。提升过程为绕R6转动;旋转平动过程为绕R6转动。
结合舱门开启方式与开启约束,舱门提升过程运动POC集Mpa为

舱门旋转开启过程的POC集Mpa为

2.2 舱门开启过程运动模式切换的尺度约束分析
舱门旋转开启的过程主要由铰链臂机构和平行杆机构协同完成。在舱门提升运动完成后,为了防止舱门滚轮与机身导向槽碰撞,舱门在旋转开启过程需保持水平状态;舱门提升完成后,铰链臂上下摇臂在舱门旋转过程中刚化,即R1、R2、R3、R4成为消极运动副,机构绕R6转动为其独立运动。
舱门相对于飞机机身旋转开启机构运动简图的水平面上(俯视)投影如图5 所示。图5 中,R6、Rb、Rc固定在机身上,可视作定平台上;R5、Ra、Rd固定在舱门上,可视作动平台上,构成并联机构。为满足舱门旋转开启过程稳定并始终平行于机身,两平行杆球副中心距尺寸与舱门铰链臂两转动副轴线间距在水平面的投影平行且长度相等,即
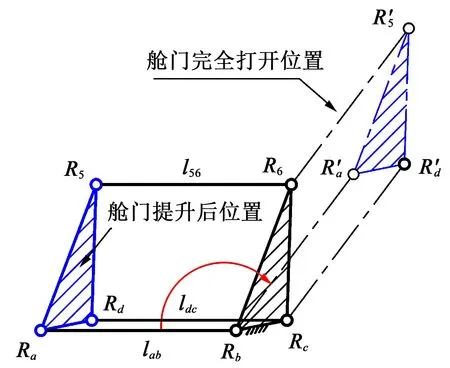
图5 舱门旋转运动水平投影机构简图Fig.5 A schematic diagram of horizontal projection mechanism for aircraft door rotation

舱门以绕R6轴线运动为独立驱动方式时,舱门运动的旋转半径为l56。其中,杆l56、ldc、lab在运动过程中保持平行且相等。
3 舱门开启运动实现机构
结合舱门开启机构POC 集与现有舱门开启方式,对舱门开启过程中运动模式的切换和驱动实现机构进行分析。
3.1 舱门运动模式切换实现方式
通过在提升过程的末端位置设置挡块,可以精确保证舱门开启机构的模式切换,使POC 集始终对应舱门开启过程中的运动模式。设置挡块实现舱门模式转换,既能够提高舱门开启过程的稳定性,又能够平衡重力,提升舱门模式切换的精度。舱门挡块设置在舱门上,其位置及舱门运动状态如表1所示。

表1 舱门挡块位置及舱门运动状态Tab.1 Aircraft door stop block positions and motion states
由舱门开启机构POC集得到

舱门提升过程具有一个垂直于R1的独立移动。当舱门处于最高位置时,舱门提升机构由挡块限位控制运动停止,平行杆机构处于登机门上端,且两个平行杆与R5、R6运动副轴线垂直。
3.2 舱门开启驱动方式
舱门提升主要由提升机构驱动主铰链上下摇臂运动实现,提升机构由多个运动回路组成。
根据自由度计算公式,有

式中,n为运动构件数;PL为低副的数目;Ph为高副的数目。在舱门提升机构中,n=12、PL=17、Ph=1。
提升过程中,舱门仅有1个自由度,舱门提升过程由舱门内手柄驱动提升机构绕R3转轴旋转实现,内手柄设置在舱门提升机构上。开启手柄在舱门提升机构上施加转矩提起舱门,控制舱门向上移动。
完成提升后,舱门与止动块接触后的开启力矩转换为向前的推力,使舱门绕R6旋转,实现舱门的旋转开启。
4 舱门旋转开启尺度约束条件验证试验
为确保舱门在旋转开启过程中保持平动,平行杆机构及铰链臂机构需满足式(14)尺度约束条件,以图6所示试验进行验证。
在试验中,设置两平行杆长度等于舱门旋转半径l56。其中,图6(a)所示为舱门铰链臂机构,图6(b)所示为主铰链在舱门闭合时的姿态,图6(c)所示为主铰链与两根平行杆在舱门开启时的姿态。
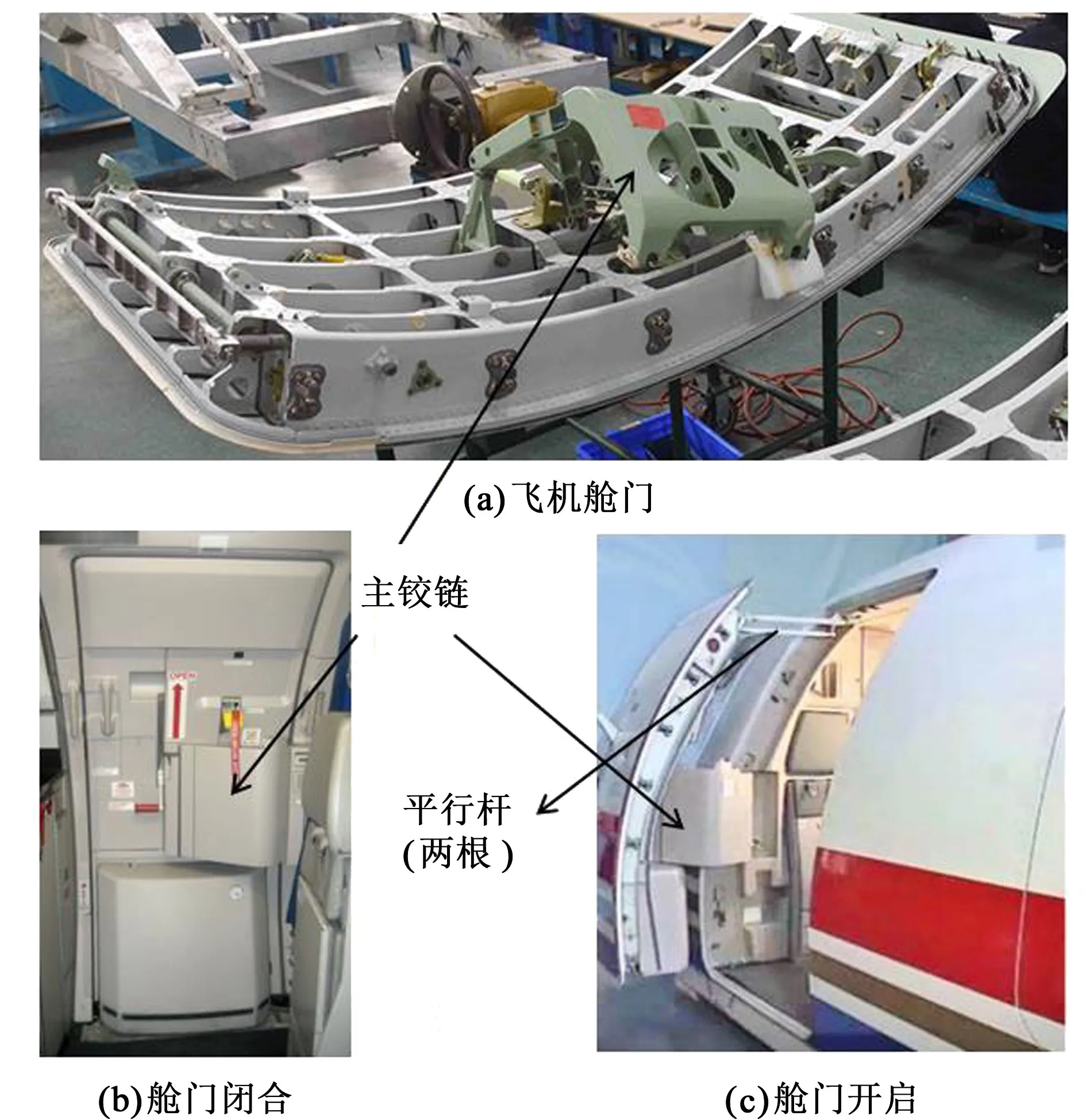
图6 舱门旋转开启尺度约束条件验证试验Fig.6 Validation of scale constraints for aircraft door rotation opening process
式(14)的尺度约束条件可保证在舱门旋转开启过程中的任意位置,舱门各运动副轴线之间的连线投影l1、l2、l3始终平行且相等。试验证明,在把登机门向外打开过程中,两个平行杆和铰链臂形成的舱门开启机构可保证舱门旋转开启平稳且保持平动,如图7所示。
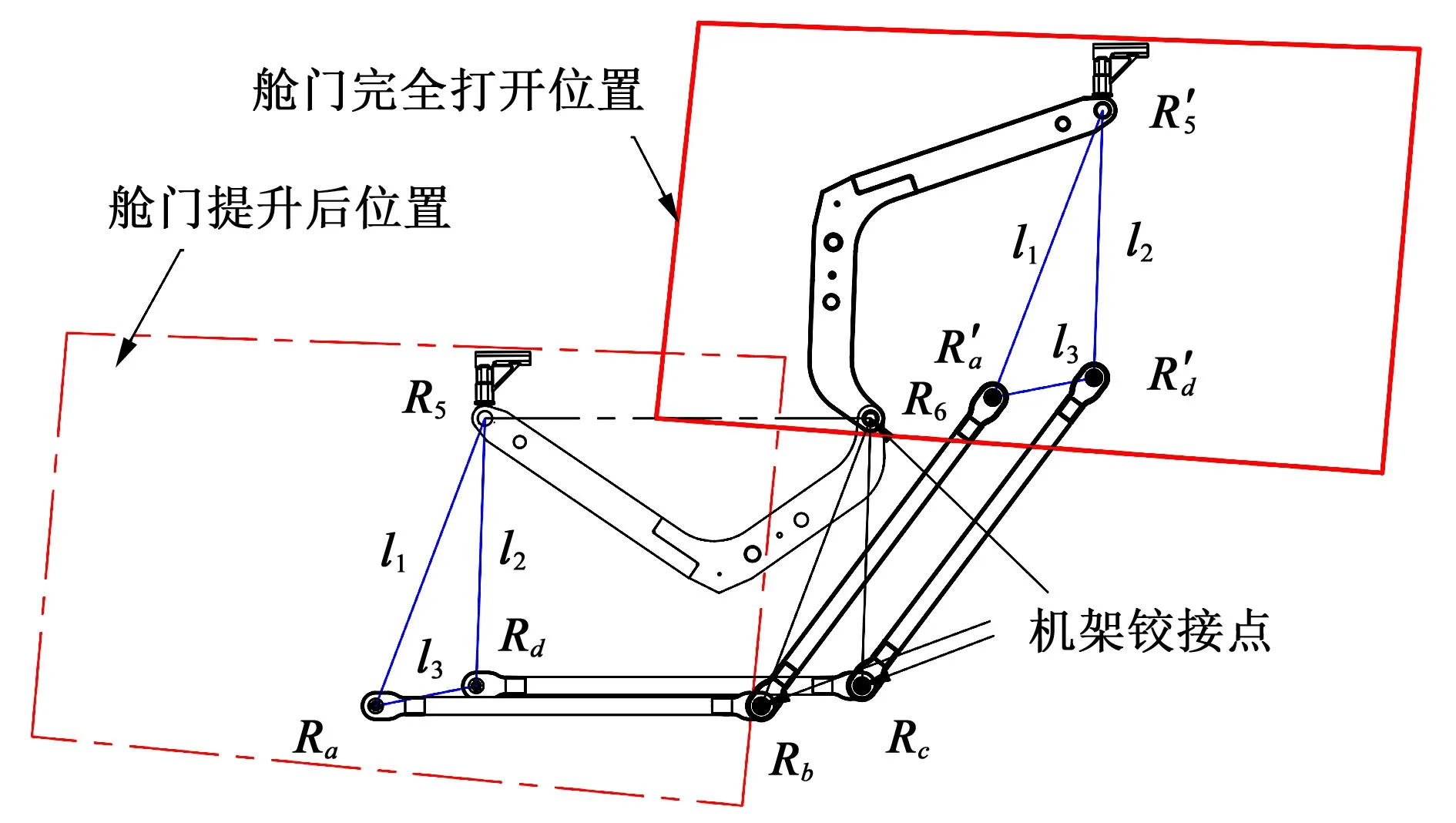
图7 舱门机构及舱门旋转开启始末位置(红色框代表舱门)Fig.7 Aircraft door mechanism and position of aircraft door rotation opening starting and ending positions(the door is represented with the red box)
5 结论
(1)针对侧开式飞机舱门运动机构,首次提出以并联机构拓扑结构方位特征集(POC)理论,将舱门抽象为由多条支链组成的并联机构动平台,求得舱门开启机构自由度及舱门POC集。
(2)根据舱门POC 集非独立运动元素数的变化,解析舱门开启过程运动模式变化,发现了运动模式变化的尺度约束条件。
(3)为揭示舱门模式切换确定性及开启过程稳定性的内在特征,从驱动形式和挡块限位的驱动方式进一步解析舱门开启过程各个状态实现的几何约束。试验证明,舱门在旋转开启过程下始终保持平动。该研究为新型飞机舱门构件运动关联性及公差带设计奠定了基础。
