高速飞行器飞行模态辨识技术及验证研究
2022-09-26王亮蔡毅鹏南宫自军
王亮 蔡毅鹏 南宫自军
(中国运载火箭技术研究院,北京 100076)
0 引言
高速飞行器在飞行过程中,姿态控制系统主要依靠陀螺敏感姿态信息,进而控制达到稳定飞行。其中,陀螺感受的姿态信息中不仅包含刚体运动姿态,还含有飞行器弹性振动引起的附加姿态信息,若姿控系统设计时不考虑这一附加姿态信息,则可能导致飞行姿态发散,严重时飞行失败。高速飞行器较传统飞行器来说,气动力矩相关系数更大,刚体穿越频率与弹性振动频率间的“带宽”减小,从而增加了飞行控制系统频域设计的难度。而从以往的飞行试验发现,一些飞行器地面模态试验获得的弹性振动频率和阻尼比与飞行状态相比偏低,据此进行姿控设计进一步加剧了设计难度。因此,发展飞行模态辨识技术,获得准确的飞行器飞行状态的模态参数对姿控设计具有重要意义。
工作模态[1]分析技术是近年来工程领域的一个研究热点和难点,是结构动态分析的一个新的重要发展方向。这一技术在如机械、航空、桥梁等多个领域的实际应用中已经取得了一些较好的效果,其理论和思想出现在20世纪70年代初,经过近四十多年的发展,形成了多种辨识的方法。按识别域分为时域辨识法、频域辨识法以及时频联合辨识法;按信号的测取方法分为单输入多输出法和多输入多输出法;按激励信号特征分为平稳随机激励和非平稳随机激励法;按识别方法可分为峰值拾取法、时间序列法、环境激励法、随机减量法以及随机子空间法等。目前工作模态参数识别方法研究较多是基于响应信号的时域参数识别方法,也有部分学者研究频域和时频域的方法[2][3]。
工作模态辨识方法最早出现是由cole在1968年提出的单阶模态测试的随机减量法[4]。Ibrahim在1973年提出了一种仅利用时域信号即可进行模态参数识别的方法,经多年不断完善形成了独具一格的Ibrahim时域法(ITD法)。Box与Jellkins在1976年提出了用于时域参数识别的时序分析方法,该方法是利用能反映系统特性的一组按时间排列数据,通过建立自回归模型或自回归滑动模型来识别模态参数。Metgeay在1983年提出了核心是最小二乘估计的单参考点复指数法[5]。Pappa在1984年提出了特征系数实现法,该方法属于多输入多输出的模态参数辨识方法,是利用线性系统的状态方程和系统最小实现理论,通过构造Hankel矩阵,利用奇异值分解技术,构建最小阶的系统实现,从而求解系统的模态参数。
20世纪90年代以后,随着测试、信号分析和计算机技术的发展,模态参数辨识技术在理论及应上用获得很大发展。1995年,美国SADIA国家实验室的James和Carne[6]证明了系统脉冲响应函数与白噪声激励下响应间的互相关函数有相似的表达式,从而将运用脉冲响应函数进行参数辨识的方法扩展到使用相关函数进行参数识别领域,也就是自然激励技术(NExT)。近年来,国内外在模态参数识别技术研究领域取得了许多理论和应用成果[7-9]。练继建等[10]将特征系统实现算法(Eigensystem Realization Algorithm,ERA)成功应用于基于熵降噪的水工结构振动模态辨识方面。刘兴汉等[11]研究了改进的随机子空间法。于开平等[12]对结构系统的脉冲响应函数进行小波变换,利用小波变换的幅值、相位与阻尼比、频率的关系进行了参数辨识。王彤等[13]提出了一种基于频域空间域分解(Frequency and Spatial Domain Decomposition,FSDD)的工作模态分析方法。黄琴等[14]提出并实现了一种基于随机减量技术和复模态指示因子函数法的新型频域工作模态参数识别方法。王鹏辉等[15]采用改进模态自然激励技术(NExT-LSCE-LSFD)对风激励下采集的时域数据进行识别,获得了火箭加注过程中的时变模态参数,并通过空箱和液氧加注状态的力锤激励模态试验结果验证了自然激励方法的有效性。
为了研究高速飞行器模态参数的天地差异,以更准确的掌握姿控设计裕度,利用工作模态测量搭载飞行试验试验平台,通过无线遥测系统获得了所有低频振动传感器数据,为工作模态技术发展积累了宝贵的数据。本文详细介绍了整个实施过程,首先根据地面试验结果确定遥测测量点以及测量频带等参数;其次根据实际飞行遥测参数,进行了数据分析,得到了飞行器飞行模态随飞行时间的变化,并与地面试验结果进行了对比分析;最后根据实施情况给出了结果和展望。
1 飞行模态辨识方法
辨识算法采用基于时域缩放选带技术的ERA方法[15]。该方面是将时域缩放技术与ERA相结合,采用小频带滤波方法缩小关心频带,达到放大有效信息的作用。实施流程如图1所示。其中首先通过滑动矩形窗滑动时域信号,接着根据矩形窗内信号的功率谱密度分析结果,选择待辨识模态的频带范围,再对原始各通道信号进行选带滤波和重采样,再根据信号的数据长度自动生成ERA方法的阶次,进行ERA方法的模态辨识,最后将辨识结果与功率谱密度曲线谐振峰峰值进行对比,另外去除阻尼比过大的模态后,筛选出较为真实的模态。
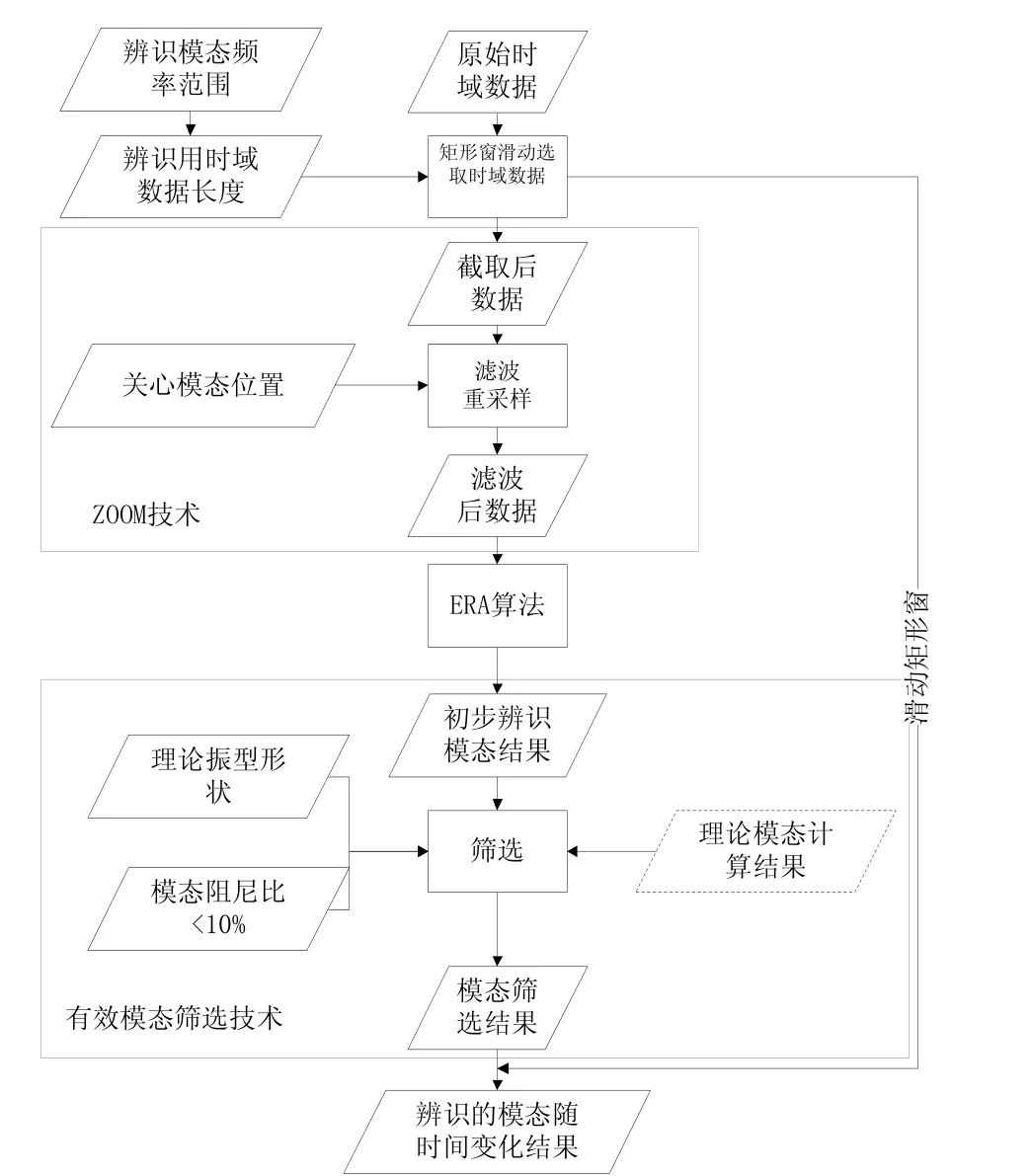
图1 基于时域缩放选带技术的ERA方法技术流程图Fig.1 The strategy of the modal identification method of ZOOM and ERA
2 测点布置方案研究
为制定测点布置方案,确保飞行试验数据有效,搭载全飞行器地面模态试验,对测点布置方案进行了验证。测量白噪声激励下全飞行器外部各测点的响应,通过对各测点时域数据进行分析,获取飞行器低阶模态,研究工作模态测点布置方案对工作模态辨识结果的影响。试验时,采用橡皮绳组,通过两点水平悬吊的方法来模拟飞行器自由-自由边界条件。在飞行器外表面沿轴向均匀布置测点,均为三向加速度传感器,外表面加速度测点共29个,将飞行器分为前、中、后三个部段,测点分布图如图2所示。研究了不同测点布置组合对工作模态辨识结果的影响,各测点组合情况如表1所示。其中组合1为全飞行器模态试验状态,测点分布较均匀;由于飞行器中部发动机为固体火箭发动机,飞行试验时无法安装振动测点,因此组合2~9为模拟发动机前段(头部)和发动机后段(尾部)有测点,发动机无测点情况,其中组合3和组合4是模拟发动机前段(头部)或发动机后段(尾部)测点较多的情况,组合5~9在组合2的基础上缩减测点数,组合7~8对比了头部内测点集中布置的情况,三个组合分别代表了测点集中在头部前段、中段和后段的情况。
图3给出了典型组合(组合1)的振型辨识结果与传统方法辨识结果的对比,前两阶振型MAC值分别为0.997和0.991。研究结果发现,测点数目较多,且测点布置在振型数值较大位置,辨识结果较好。因此根据研究结果,综合考虑测点布置的可达性,飞行试验时在各舱段刚度较大的部位沿飞行器一条母线轴向搭载布置了9个振动传感器,测量飞行过程中的横向低频振动数据,测点布置截面示意图如图4所示,分布为头部7个和尾部2个测点,均布置在各舱段加强框或对接框处,保证测量信号中无局部模态响应的影响。

图3 典型测点组合模态振型辨识与传统方法结果对比Fig.3 The comparison of the identification and theoretical modal shapes’ results under typical condition
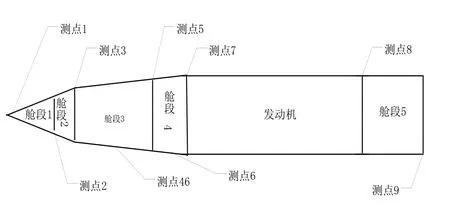
图4 测点布置截面示意图Fig.4 Distribution of measuring points on the section of aircraft
3 数据分析
3.1 时域数据分析
根据遥测数据,各路数据均有效,典型测点如测点1的Y向振动,其全程时域响应和均方根值归一化曲线如图5所示。

图5 测点1的Y向测点时域信号Fig.5 The time response of measuring point number
分析时域响应,可以得出以下结论:a)振动响应在时域归一化时间的25%以前和80%以后响应较大,符合飞行振动响应大小规律,主动段发动机机械振动和下压段气动脉动压力引起较大的振动响应;b)由于采用了低频小量程测量,测量数据较传统振动遥测数据品质好。
3.2 频域分析
选择典型时段信号进行频域分析,确认模态辨识使用数据段。选择典型测点如测点1的Y向振动,对其信号选择主动段、中间小动压飞行段和下压段三段典型时段,进行时频分析,分析结果如图6~8所示。
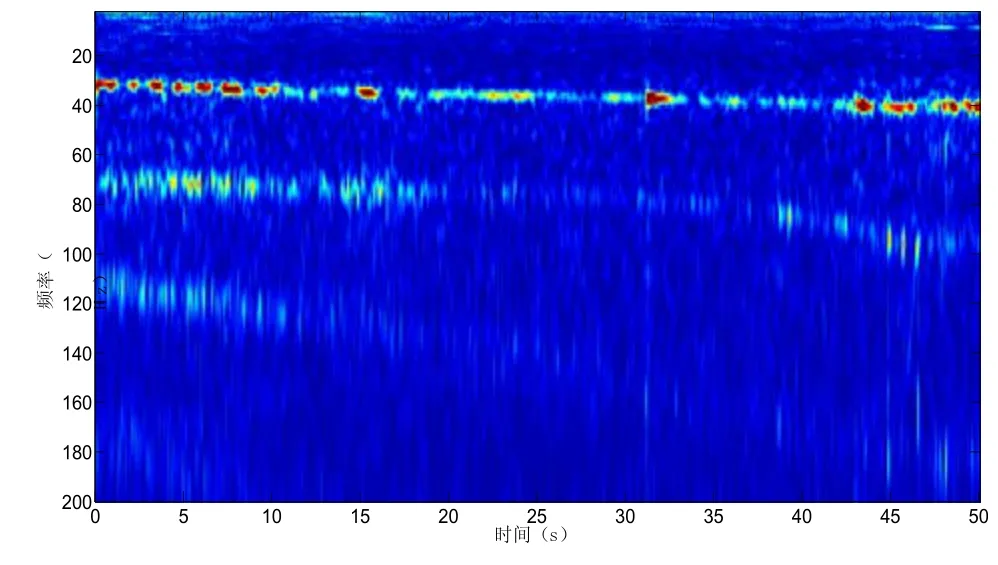
图6 主动段信号时频分析图Fig.6 The time-frequency analysis result of the powered phase
从曲线上可以发现:1)振动响应较大段,如主动段和下压段,从时频信号图可明显看出飞行器前两阶的模态频率位置,相反的,在振动响应较小段,从时频信号图中无法清晰的看出飞行器前两阶模态频率;2)在振动响应较大段,其响应中飞行器前两阶模态响应信噪比较好,除模态影响区外,其他频段的响应的白噪声特征较为明显;3)主动段的时频信号图较好的捕捉了飞行器低阶模态频率位置,上可明显看出飞行器前三阶模态频率随时间逐渐升高;4)下压段的时频信号图中,看出飞行器低阶模态频率基本没有发生变化,与主动段末秒数值基本一致,从一定程度上说明在该飞行弹道下,气动加热引起的壳体温升对飞行器整体模态的影响较小。

图7 中间小动压飞行段信号时频分析图Fig.7 The time-frequency analysis result of the small dynamic pressure flying phase
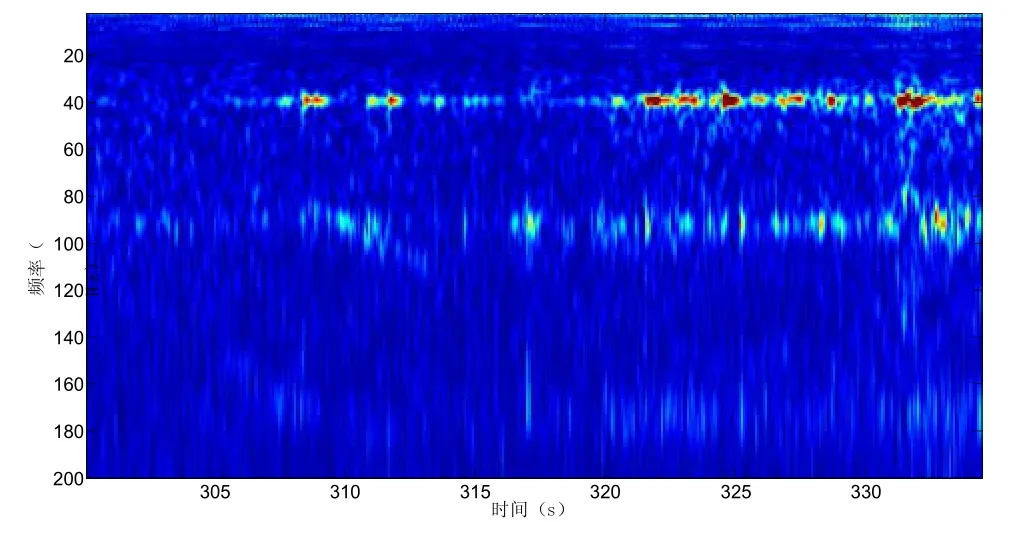
图8 下压段段信号时频分析图Fig.8 The time-frequency analysis result of the descend flying phase
3.3 飞行模态辨识
本小结根据以上分析,选择信噪比较大段进行飞行模态辨识,并采用频带上下限和阻尼比上限对虚假模态进行了删除,其中频率设置功率谱密度峰值10%的偏差容忍带,阻尼比设置0.1的上限值。辨识的飞行器Y向模态频率和阻尼比结果如表2所示。其中在主动段和下压段分别选择典型时刻,选择1s数据进行了飞行模态辨识。
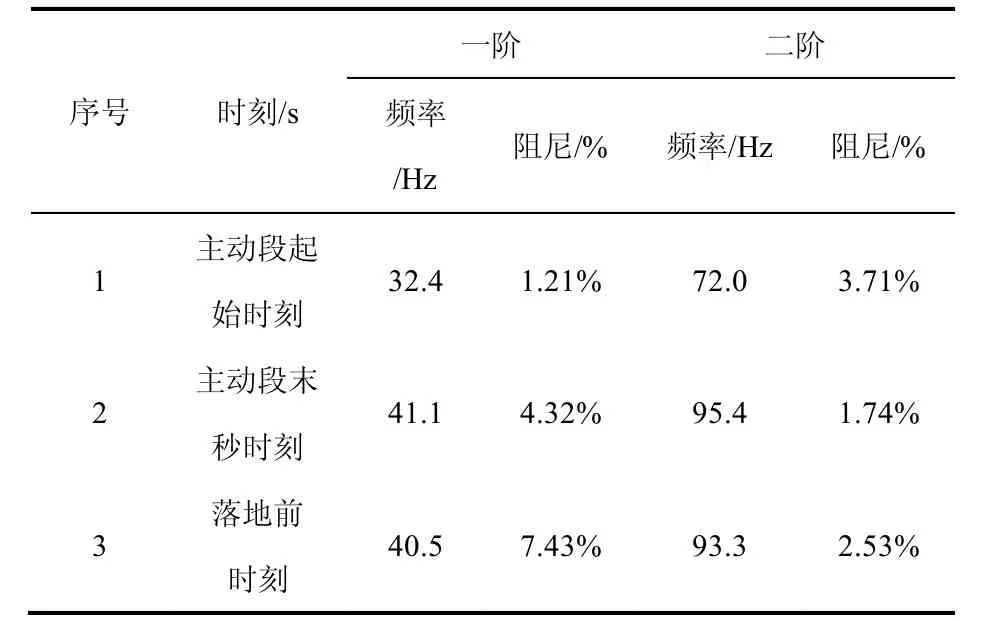
表2 模态频率和阻尼比辨识结果Table 2 Identification results of modal frequency and damping
由于飞行试验0s时无激励,随后发动机点火后的冲击激发了飞行器结构的响应,发现一阶模态响应较为明显,而二阶以上模态不清晰,因此对其进行了一阶飞行模态的辨识。将飞行过程中的模态辨识结果与地面试验结果作图对比,如图9~11所示,其中二阶模态振型的辨识值使用了1s时刻的数据。
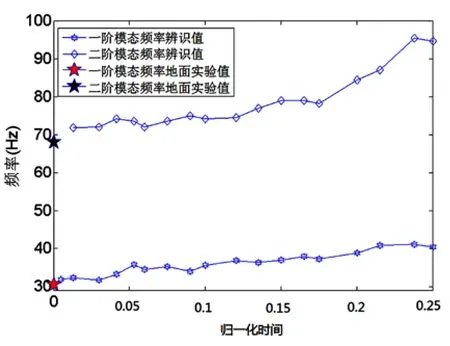
图9 飞行模态辨识结果与地面试验结果对比Fig.9 Comparison of modal identification and ground test results
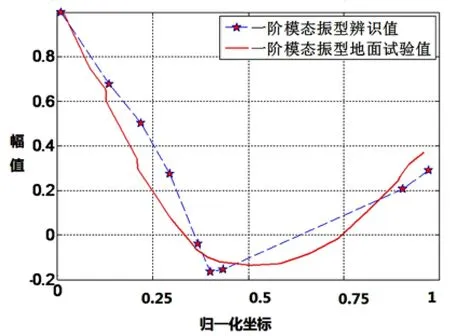
图10 一阶模态振型辨识与实验值对比Fig.10 Comparison of first order modal shape’s identification and ground test results

图11 二阶模态振型辨识与实验值对比Fig.11 The comparison of second order modal shape’s identification and ground test results
从对比结果可以发现:1)模态频率辨识结果在0s左右与地面试验的估计值偏差为4%和5%,后续随着飞行时间加长,燃料的消耗,前两阶模态在综合因素影响下呈现随时间增大的趋势,符合规律;2)模态振型的辨识结果与地面试验值的MAC值在0.85以上,说明在形态上是一致的,且辨识用的9个测点基本能够反应前两阶的振型形状。
4 结论
本文介绍了高速飞行器飞行模态辨识技术及验证研究情况,通过数据分析,地面与飞行试验对比分析,得出以下结论:
1)通过飞行模态测量搭载,验证了测量方案的可行性,为飞行模态辨识积累了宝贵的数据。测量数据的品质较传统环境测量优异,可以辨识出飞行器的模态频率和模态振型。采集得到的数据能够较好的辨识出飞行过程中的飞行模态,模态频率辨识值与地面实验值的差值最大在5%左右,模态振型的辨识值与地面实验值的MAC值均在0.85以上,说明该测量方案不仅可以用于辨识模态频率,而且可用于辨识低阶模态振型。
2)模态特性存在天地差异,影响因素的比例及剥离方法需要进一步研究。发射初期的模态频率辨识结果较地面试验结果高,差别在于发射时发动机的轴向推力产生较大的轴向过载,可能由于轴向过载的存在导致飞行器各对接面对接更加紧密,导致刚度增大,从而致使模态频率偏高。从下压段模态频率辨识结果与主动段末的模态频率辨识结果相比,两者基本一致,说明气动加热引起壳体的温升没有引起飞行器整体刚度明显的改变。3)飞行器现有模态特性设计方法合理,设计方法的精细化需要进一步研究。辨识出的模态阻尼比较地面试验值高,这一方面可能是由于算法本身辨识的精度问题;另一方面可能是由于外部激励的有色度影响,有色噪声会导致整个系统表现出拥有较大的阻尼,因此后续设计方法的精细化需要进一步研究。
