基于时/频域分析的光电吊舱稳定精度测试方法研究
2022-09-13徐飞飞杜言鲁姜世洲巩全成王明超
徐飞飞,杜言鲁,郑 蕾,姜世洲,巩全成,王明超
(西安应用光学研究所,陕西 西安 710065)
引言
光电吊舱作为可快速获取地/海面信息的观瞄设备,通常搭载可见光、热像、多光谱等光学载荷,实现在惯性空间内对探测区域稳定成像,已广泛应用于目标探测与识别、目标跟踪、目标定位等领域[1]。为实现远距离目标探测识别,国内外光电吊舱在传统惯性稳定平台基础上,通过在光路中增加光学补偿元件,与惯性平台构成复合轴系统,以实现高精度的瞄准线稳定[2-3]。
稳定精度作为评估光电吊舱性能的关键指标之一,目前针对光电吊舱瞄准线稳定精度的测试方法主要有以下3 种:1)基于图像处理的稳定精度检测方法,其采用平行光管模拟目标,将光电吊舱放置在摇摆台上,摇摆台提供外界扰动,通过图像处理检测视频中图像抖动量,进而获得光电吊舱稳定精度;由于摇摆台提供的扰动频率低(10 Hz以内)以及受视频图像帧频的限制,此方法仅适用于低频扰动下的稳定精度测试,而不适合振动台宽频带在随机振动环境下的测试[4-8];2)基于光电自准直仪的瞄准线稳定精度检测方法,其在光电吊舱内部载荷上粘贴平面反射镜,光电自准直仪检测平面反射镜的转动角度,作为光电吊舱内部载荷的角位移,进而得到瞄准线稳定精度。该方法一方面要求光电自准直仪自身惯性稳定,另一方面不适用于粗精组合稳定的光电系统[9-13];3)基于频谱分析仪的瞄准线稳定精度测试方法,其通过频谱分析仪对光电吊舱内惯性传感器测量数据进行处理,得到瞄准线稳定精度数值。此方法无法直观地反映图像抖动及概率分布情况,由于粗精组合稳定光电系统内含光学补偿元件,此方法无法直接应用[14-15]。
本文结合某粗精组合稳定光电系统,经数据采集系统,得到光电吊舱内部载荷的惯性角速率信号和光学补偿元件的角位置信号;基于时域信号分析,直观地展示图像抖动及概率分布情况;基于频域信号分析,得到瞄准线角位置信号的功率谱密度和瞄准线稳定精度;提出频段稳定精度贡献度和二级稳定效能提升度,给出影响瞄准线稳定精度的频率要素和二级稳定的提升效能,对于光电吊舱结构与伺服系统设计具有指导意义。
1 测试系统组成
某光电吊舱采用共光路光学系统,如图1 所示,主要包括主镜、次镜、校正镜组、快速反射镜、分光棱镜、电视镜组以及热像镜组。共光路光学系统和光纤陀螺均安装在内环框架上,光电吊舱采用粗精组合稳定的方式,光纤陀螺用于测量内环载荷上的惯性角速率,即粗级稳定误差;快速反射镜对粗级稳定误差进行补偿,并由电涡流传感器测量补偿角位置信号。
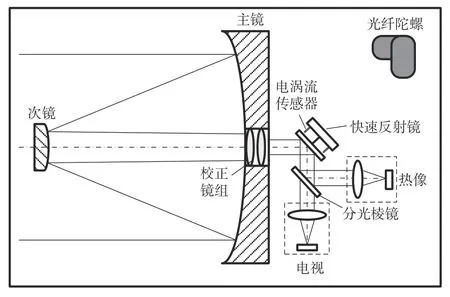
图 1 共光路光学系统组成示意图Fig.1 Schematic diagram of common-path optical system composition
光电吊舱稳定精度测试系统如图2 所示。待测光电吊舱通过振动工装与振动台连接,数据采集系统通过光电吊舱测试电缆采集内部光纤陀螺和电涡流传感器的数据,传输至计算机,并由稳定精度分析软件分析得到光电吊舱稳定精度等信息。
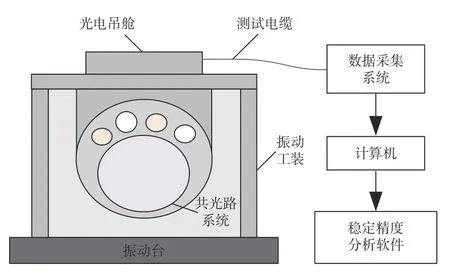
图 2 测试系统组成示意图Fig.2 Schematic diagram of testing system composition
2 基于时/频域分析的测试方法
通过数据采集系统采集光电吊舱内光纤陀螺的数据,得到内部载荷方位轴、俯仰轴的惯性角速率为 ωaz、ωel;采集光电吊舱内快速反射镜内电涡流传感器的数据,得到光学补偿元件的方位轴、俯仰轴的角位置信息为 θaz、θel。
2.1 时域分析方法
为得到内部载荷的惯性角位置信号,需对惯性角速率信号进行数值积分,常用的数值积分方法有复合梯形积分、复合Simpson 积分、Romberg 积分以及高斯积分等。假定数据采集系统的采样频率为Fs,以方位轴惯性角速率 ωaz为例,积分得到内部载荷在tn时刻的惯性角位置为

式中:ωaz(tk)为tk时刻内部载荷方位轴惯性角速率;tk为第k组数据对应的时刻。
由于存在漂移,积分得到的惯性角位置信号将包含趋势项,为此可采用最小二乘法对惯性角位置信号进行线性拟合,拟合直线方程为

消除趋势项,得到内部载荷的惯性角位置信号,即为粗平台稳定下的瞄准线惯性角位置:
总而言之,随着现代社会信息化程度的不断提高,高中语文阅读教学的要求也有所提升,学生不仅是要能够通过阅读获取到丰富的知识,还要在阅读中将各种信息予以有效整合。为了顺应现代教育要求,教师需要优化教学方法,提高学生的教学地位,通过帮助学生掌握阅读技巧等措施来促进阅读教学效率的提高。

根据光电吊舱内部载荷共光路光学系统方案,由快速反射镜补偿粗平台稳定残差,则推算快速反射镜补偿的方位轴、俯仰轴瞄准线角位置的方程为

式中:K为共光路系统的光学放大倍率。
经粗精组合稳定后的光电吊舱瞄准线方位轴、俯仰轴惯性角位置为

通过以上分析,可得到粗平台稳定下的瞄准线惯性角位置 ψaz、ψel,粗精组合稳定下的瞄准线惯性角位置 αaz、αel。为直观地反映光电吊舱图像抖动情况,可模拟探测器成像过程。设图像传感器的帧频为fs,探测器曝光时间为te,以探测器曝光时间内瞄准线角位置的平均值除以探测器瞬时视场NFOV作为图像抖动的像素数,同样以方位向为例,可得图像抖动像素数为

式中:〈〉为取整符号,于是可得粗精组合稳定下图像抖动的像素数为naz、nel;粗平台稳定下图像抖动的像素数为maz、mel。通过对像素数进行统计,得到其概率分布情况,表征图像抖动分布情况。
2.2 频域分析方法
根据时域分析,得到光电吊舱瞄准线惯性角位置 αaz、αel,在随机振动试验下,瞄准线的惯性角位置信号为随机信号,为得到其频率特性,通常采用功率谱密度的分析方法。首先求解信号的自相关函数:

对自相关函数进行傅里叶变换后得到功率谱密度函数:

式中:ω为频率,单位为rad/s 。
由功率谱密度函数逆傅里叶变换得到自相关函数:

通过功率谱密度函数,可得全频带下瞄准线稳定精度为

定义在频带[f-Δf,f+Δf]下的瞄准线稳定精度为

式中:f=ω/(2π),单位为Hz。
为评估不同频带对瞄准线稳定精度的影响程度,定义了频段稳定精度贡献度:

为评估二级稳定对光电系统稳定性能提升程度,定义了二级稳定效能提升度:

3 测试结果
对某粗精组合稳定光电吊舱开展随机振动试验,通过数据采集系统得到光电吊舱内光纤陀螺的数据和快速反射镜角位置传感器数据。光纤陀螺内部符号规定,绕其敏感轴逆时针旋转,陀螺数据为正,绕其敏感轴顺时针旋转,陀螺数据为负;快速反射镜内电涡流传感器符合规定,绕旋转轴逆时针转动,角位置信号为正,绕旋转轴顺时针转动,角位置信号为负。数据采集系统的采样频率为2 000 Hz,测得随机振动试验下内部载荷方位向和俯仰向的惯性角速率,如图3 所示。方位向惯性角速率直流偏置量为-0.004 6°/s,标准差为0.331 4°/s,波峰-波谷值为2.422 4°/s;俯仰向惯性角速率直流偏置量为-0.000 78°/s,标准差为0.222 6°/s,波峰-波谷值为1.504 7°/s。
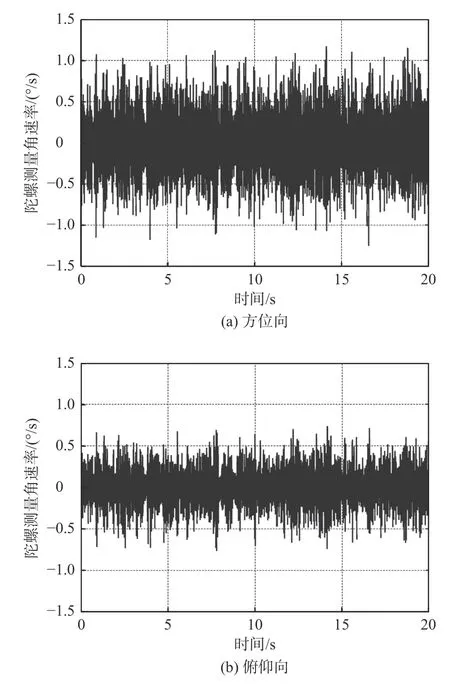
图 3 陀螺测量惯性角速率Fig.3 Inertial angular rate measured by gyro
快速反射镜方位向和俯仰向的角位置信号,如图4 所示。方位向角位置偏置量为0.013 6°,标准差为0.003 7°,波峰-波谷值为0.027 5°;俯仰向角位置偏置量为0.019 4°,标准差为0.003 5°,波峰-波谷值为0.025 7°。
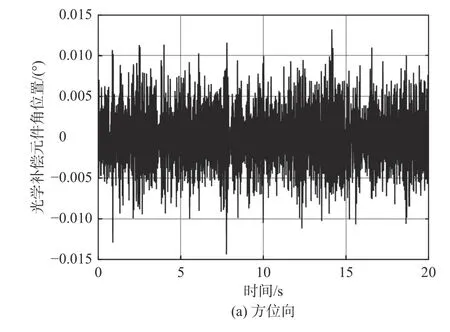
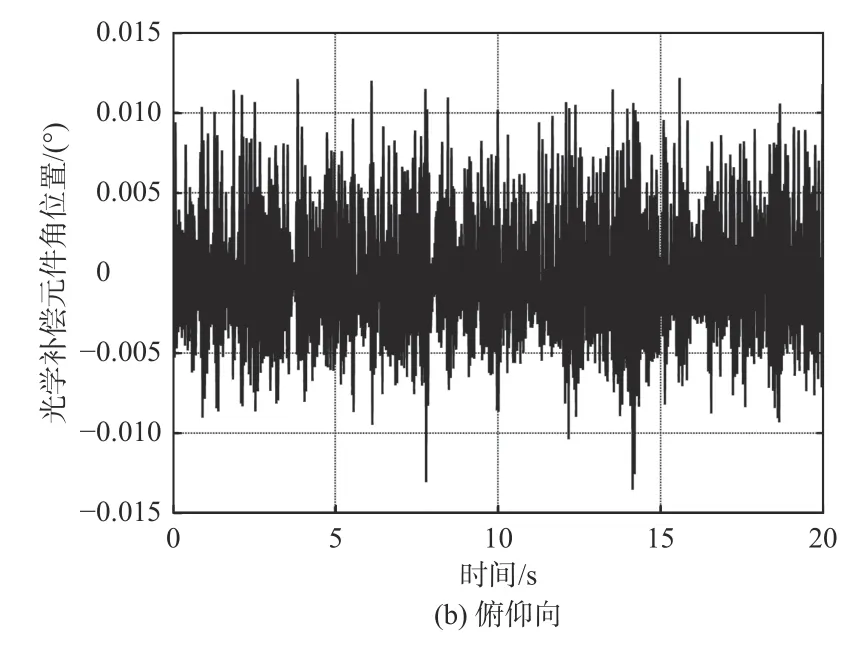
图 4 光学补偿元件角位置信号Fig.4 Angular position signal of optical compensation elements
3.1 时域分析结果
对测量的惯性角速率信号进行数值积分,得到惯性角位置信号,如图5 所示。采用最小二乘法对趋势项进行拟合,可得方位向漂移角速率为-0.004 7°/s,俯仰向漂移角速率为-0.000 7°/s。
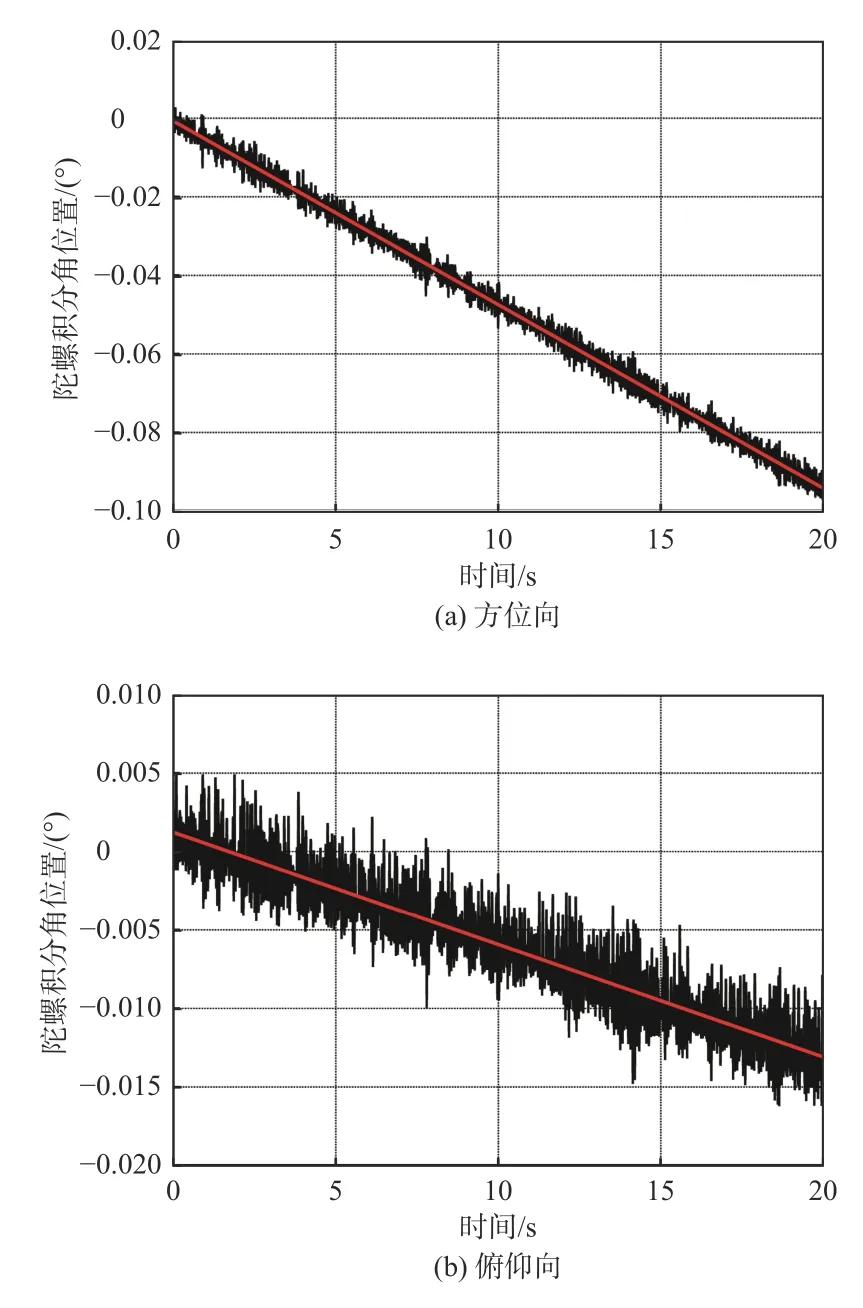
图 5 陀螺角速率积分角位置信号Fig.5 Angular position signal of angular-rate integral measured by gyro
消除趋势项,得到内部载荷上的惯性角位置信号,如图6 所示。对惯性角位置信号进行统计得到标准差(1 σ),得到粗平台稳定下方位向稳定精度为35.53 μrad,俯仰向稳定精度为29.10 μrad。
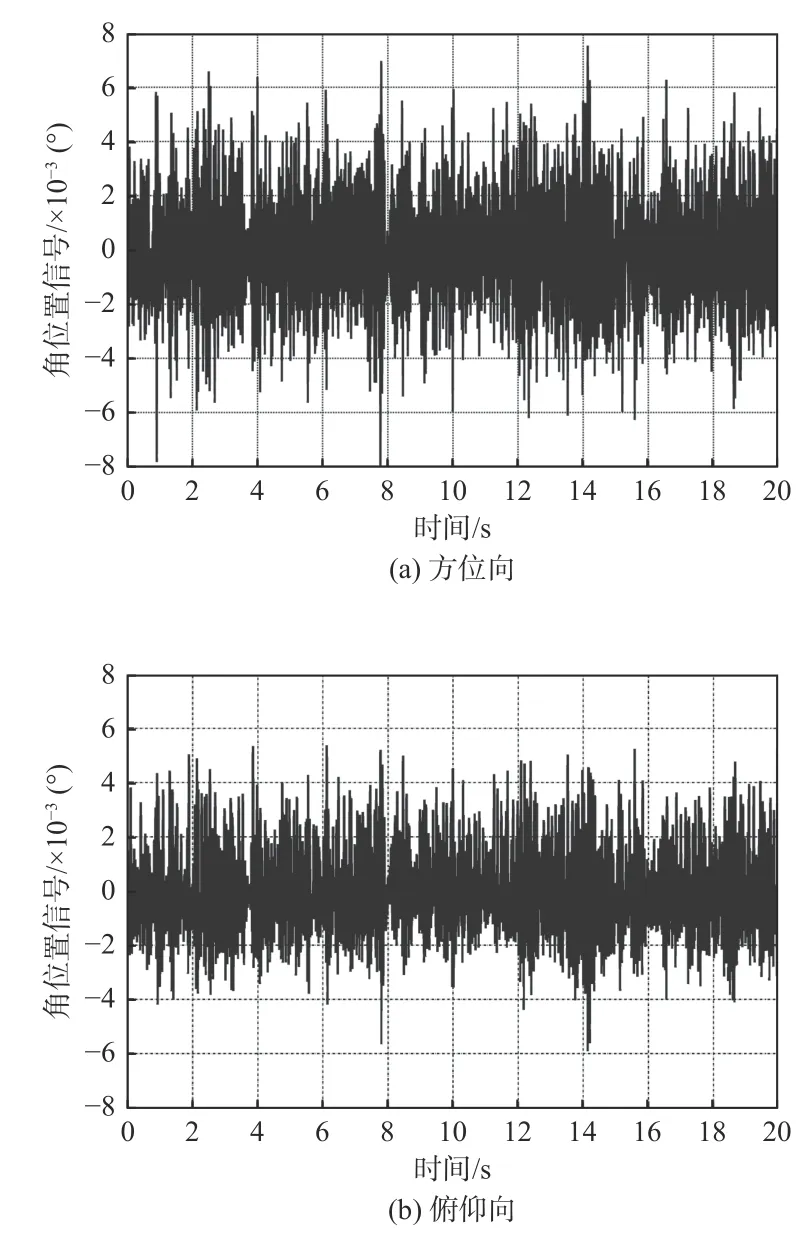
图 6 内部载荷惯性角位置信号Fig.6 Inertial angular position signal of internal payload
经粗精组合稳定后,光电吊舱瞄准线惯性角位置信号如图7 所示。可见快速反射镜很好地补偿了粗平台运动,大幅提升了瞄准线稳定精度,对瞄准线角位置信号进行统计计算标准差(1 σ),得到粗精组合稳定下方位向稳定精度为7.66 μrad,俯仰向稳定精度为4.50 μrad。
通过模拟图像传感器成像过程,直观地反映图像抖动情况,设定图像传感器帧频为60 Hz,探测器曝光时间为12 ms,探测器瞬时视场为5 μrad,得到图像抖动像素量,并对图像抖动像素数进行统计,得到其概率分布情况。图8 为粗平台稳定下图像抖动情况,统计得到方位向图像抖动量的标准差为6.30 pixel,俯仰向图像抖动量的标准差为5.39 pixel,表现在整个像面上的图像抖动的均方根误差为8.29 pixel。
图9 为粗精组合稳定下图像抖动情况。统计得到方位向图像抖动量的标准差为1.31 pixel,俯仰向图像抖动量的标准差为0.77 pixel,表现在整个像面上的图像抖动的均方根误差为1.52 pixel,可见增加二级稳定后,瞄准线稳定精度得到明显提升。
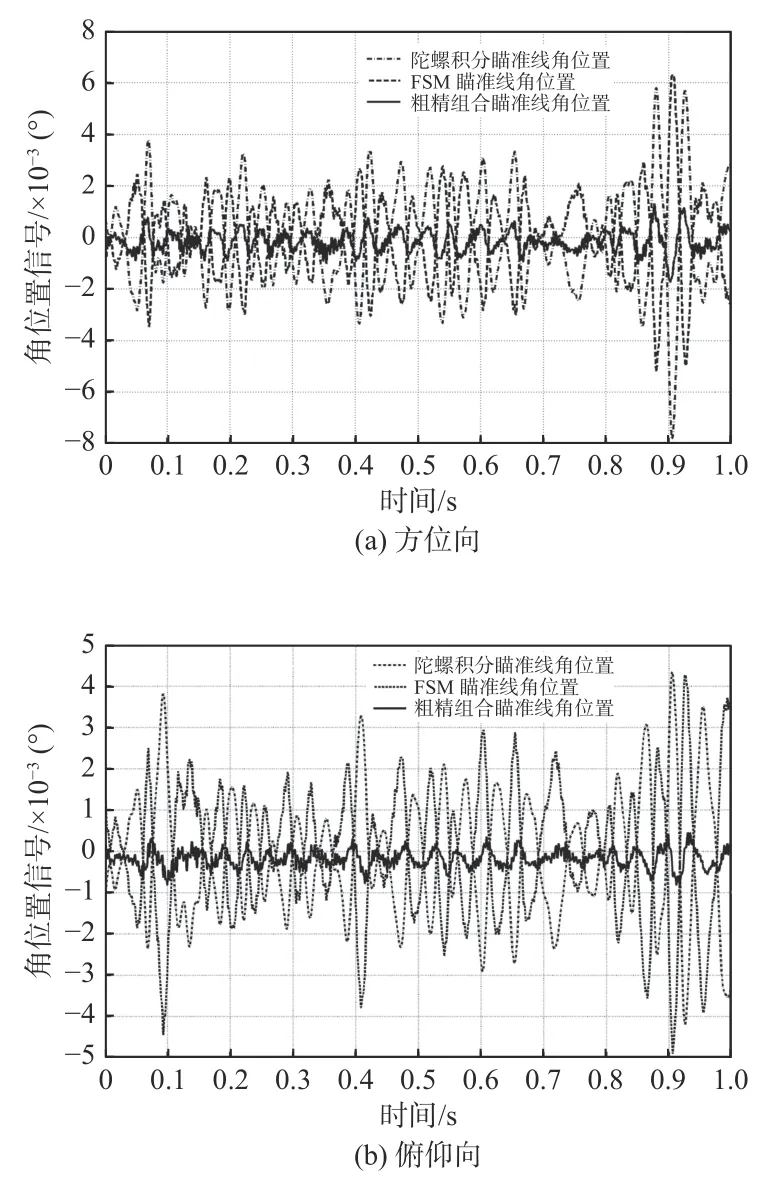
图 7 粗精组合稳定下的瞄准线角位置Fig.7 Line of sight angular position with coarse and fine platform stabilization
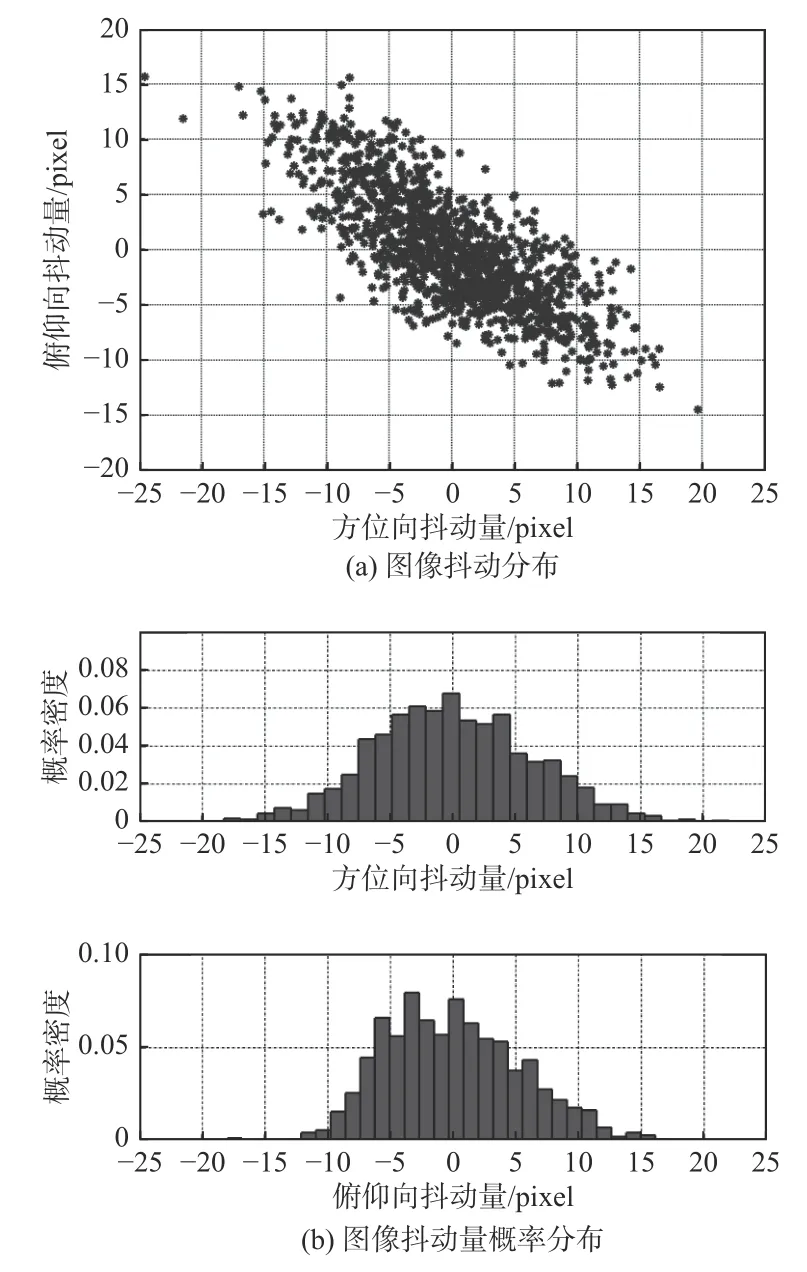
图 8 粗平台稳定下的图像抖动情况Fig.8 Image jitter with coarse platform stabilization
3.2 频域分析结果
基于时域分析得到光电系统瞄准线惯性角位置信号,开展随机信号功率谱密度分析,得到瞄准线稳定精度的频率分布。图10 为粗平台稳定、粗精组合稳定下瞄准线角位置信号的功率谱密度曲线。
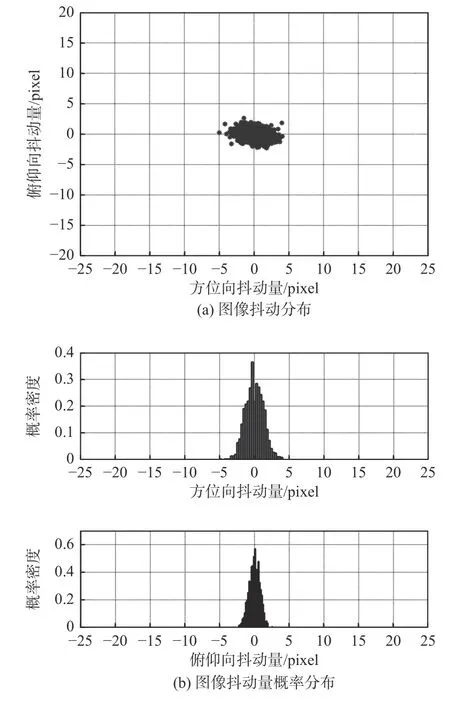
图 9 粗精组合稳定下的图像抖动情况Fig.9 Image jitter with coarse and fine platform stabilization
对功率谱密度在频率域积分,可得瞄准线稳定精度曲线,如图11 所示。可见在200 Hz 内粗平台稳定时,方位向稳定精度为35.52 μrad,俯仰向稳定精度为29.11 μrad;在200 Hz 内粗精组合稳定时,方位向稳定精度为7.65 μrad,俯仰向稳定精度为4.51 μrad。

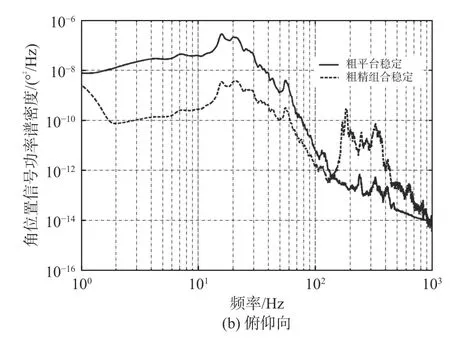
图 10 瞄准线角位置功率谱密度曲线Fig.10 Power spectrum density curves of line of sight angular position
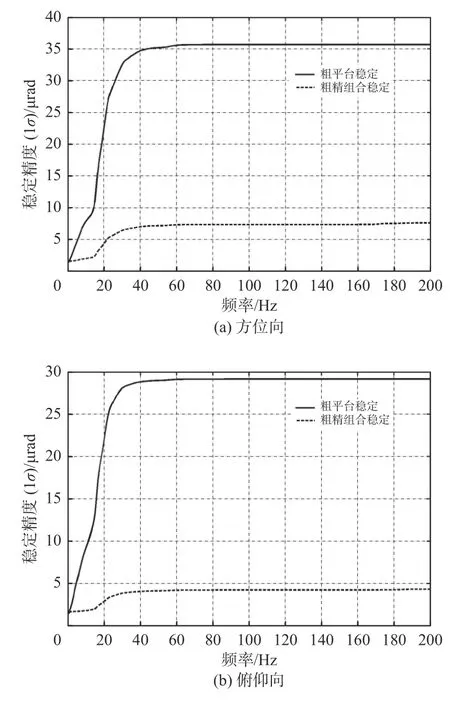
图 11 瞄准线稳定精度曲线Fig.11 Stabilization accuracy curves of line of sight
为分析各频段对瞄准线稳定精度的影响程度,得到频段稳定精度贡献度曲线。图12 为粗平台稳定时各频段的稳定精度贡献度。可见在15 Hz~30 Hz频带对稳定精度的贡献度较大,需对结构、伺服系统在此频段的特性进行分析;在80 Hz 以上频带对稳定精度的贡献度很小。
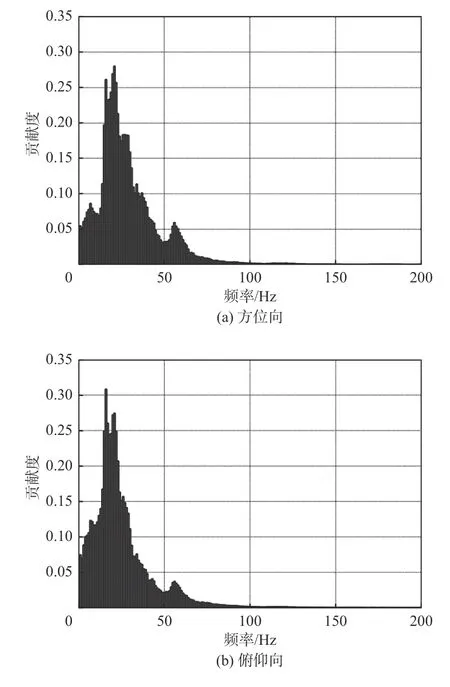
图 12 频段稳定精度贡献度曲线Fig.12 Contribution curves of frequency band stabilization accuracy
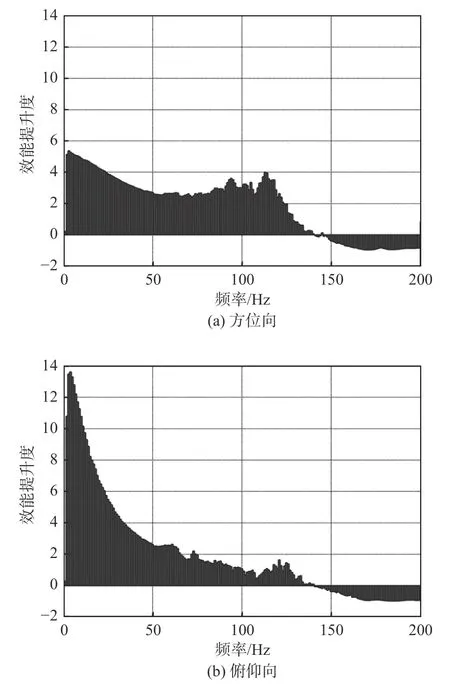
图 13 二级稳定效能提升度曲线Fig.13 Efficiency improvement curves with two-level stabilization
在粗精组合稳定光电系统中,二级稳定可大幅提升瞄准线稳定精度。为分析二级稳定在不同频段对瞄准线稳定性能的提升程度,绘制了二级稳定效能提升度曲线,如图13 所示。可见在140 Hz以内,效能提升度为正,表明二级稳定可提升光电系统稳定性能;俯仰向随着频率的增加,效能提升度下降;方位向在20 Hz 以内,二级稳定效能提升度不如俯仰向,但在80 Hz~120 Hz 处,方位向二级稳定效能提升度要比俯仰向高。在140 Hz 以上,二级稳定效能提升度为负值,表明二级稳定会导致此频段的稳定性能下降。
4 结论
本文介绍了一种基于时/频域分析的光电吊舱瞄准线稳定精度测试方法,通过数据采集系统得到陀螺角速率数据和快速反射镜的角位置信号。一方面基于时域信号分析,得到图像漂移的角速率和图像抖动的像素数,直观地反映图像抖动及概率分布情况;另一方面基于频域信号分析,得到不同频率处的瞄准线稳定精度。分析了频段稳定精度贡献度和二级稳定效能提升度,给出了影响瞄准线稳定精度的频率要素,可用于指导光电吊舱结构与伺服系统设计。
