大田对靶施药雾滴定向沉积控制方法研究
2022-08-05李海龙权龙哲皮鹏飞郭英豪
李海龙 权龙哲,2 皮鹏飞 郭英豪 马 震 余 涛
(1.东北农业大学工程学院,哈尔滨 150030;2.安徽省智能农机装备工程实验室,合肥 230036;3.安徽农业大学工学院,合肥 230036)
0 引言
对靶施药是实现农药高效利用、减少环境污染的有效技术手段,该技术可根据病灶区域的防控需求来定量施药,实现农药高效利用,维持农田生态可持续发展[1-4]。基于处方图的对靶施药技术可根据全球导航卫星系统(Global navigation satellite system,GNSS)获取喷头位置信息和运动状态,进行处方图位置匹配控制喷头动作,进行按需对靶施药,从而提高作业速度,降低植保装备成本[1,5-8]。然而,基于处方图的对靶施药系统仍无法避免GNSS设备信号延迟、控制系统指令滞后、喷头响应动作延迟,从而造成雾滴沉积位置偏移的问题,使得对靶施药精度下降[9-12]。
国内外众多学者为解决对靶施药雾滴沉积偏移问题开展了大量研究,其中包括作业速度精准感知、定位信息融合、滞后时间补偿、雾滴沉积纠偏、雾滴漂移控制等,但这些研究都以较低分辨率的大尺寸靶标物体作业场景为主[13-17]。为满足面向植株个体水平的高分辨率对靶施药的作业需求,解决因靶标尺寸过小、靶标数量过多、动作时间过短、执行部件过多所造成的系统性延迟问题,寻求可行方式来准确预估对靶施药过程中的雾滴沉积位置,是提高对靶施药作业精度的关键[18-19]。
针对以上问题,本文以对靶喷施的雾滴粒群为研究对象,构建喷头位姿高频感知系统,建立植保装备作业过程中的雾滴沉积覆盖区域预估模型,制定喷头控制规则,旨在避免因系统性延迟造成的雾滴沉积位置偏移问题,以期为发展高分辨率精准施药提供参考。
1 对靶施药作业分析
1.1 对靶施药平台结构
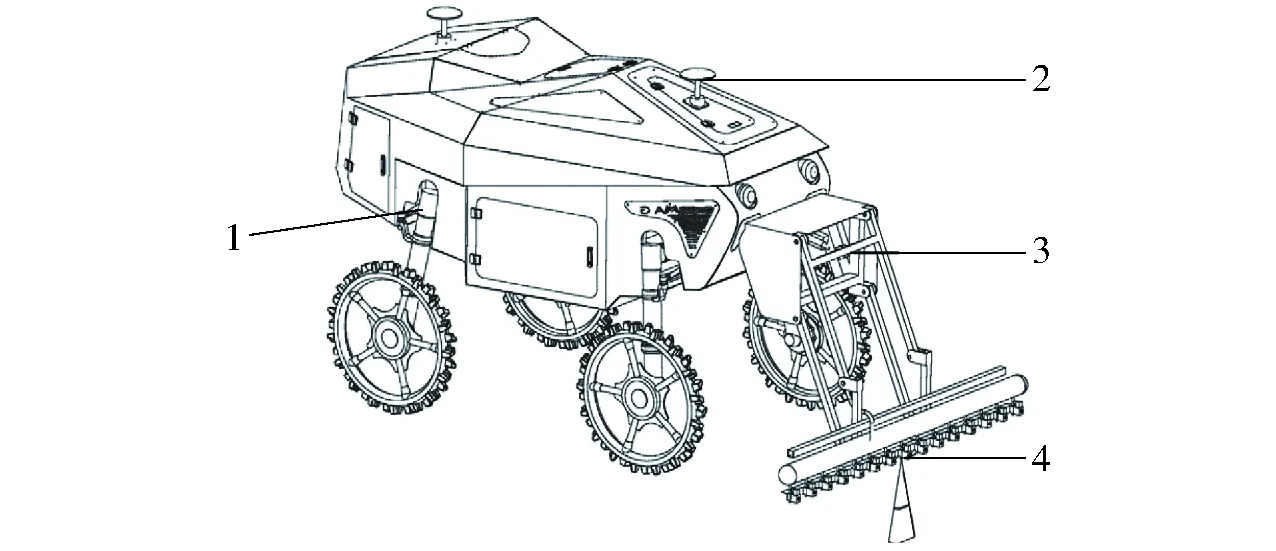
图1 对靶施药机器人Fig.1 Targeted spraying robot1.行走底盘 2.GNSS 3.对靶施药控制系统 4.电磁喷头
基于处方图的对靶施药机器人结构如图1所示,主要由行走底盘、GNSS、对靶施药控制系统和电磁喷头构成。
1.2 工作原理
基于处方图的对靶施药机器人在田间工作时,首先通过对靶施药控制系统进行GNSS信号解析,然后根据喷头与定位定向天线的空间结构位置关系,解算出各喷头的施药覆盖坐标范围,最后将各喷头覆盖范围与处方图中的作业区域信息进行比对,以此控制喷头动作,完成对靶喷施。
1.3 对靶施药作业特点
与传统大田施药作业不同,面向植株个体水平的高分辨率对靶施药作业,要求控制系统具有极快的喷头位置状态信息更新频率,从而使控制喷头在极短时间内响应动作,实现喷头覆盖区域与处方图靶标区域的匹配,完成药液定向喷施[17,20]。植保作业存在作业装备、土地状况、施药对象的差异性,对作业速度要求不一,作业速度越快,喷头响应动作时间越短,为使靶标区域外的药液沉积面积更小,需要提高对系统的实时性要求,在保证对靶施药准确率的前提下,对雾滴沉积偏移距离的要求也就更高。对靶施药沉积区域的雾滴密度存在边缘效应,需通过延长喷头动作时间进行完整覆盖,或使用传导型药剂来弥补边缘效应缺陷。对靶施药喷头间断动作所形成的雾滴群体不连续,抗干扰能力较弱,需采取降低喷头作业高度、提高管路压力等措施,以减小风场等因素对雾滴沉积区域的影响。
1.4 雾滴沉积偏移分析
机器人搭载的GNSS(上海指尚DOVE-E482型,精度1 cm)通过接入连续运行参考站(Continuously operating reference stations,CORS)的实时差分(Real-time kinematic,RTK)数据链(千寻知寸FindCM,精度2 cm),实时获取机器人准确位置。由于CORS-RTK通讯机制和硬件数据更新频率的限制,使得机器人运动过程中GNSS信号存在误差和延迟。对靶施药控制系统对GNSS数据中的$GPGGA、$GPVTG、$GNHDT语句进行解析,并根据喷头空间位置结构获取各喷头的覆盖范围;抽取比对处方图中数据,控制喷头瞬间响应的整个过程中存在系统性延迟。施药靶标对象均存在空间密度差异的现象,这将直接影响控制系统在当前区域的运算量,导致系统性延迟不一。假定各喷头与定位定向天线位置相对固定,沉积过程不受风场干扰,在整个系统信号误差和时间延迟的共同作用下,喷头将在错误位置响应动作,造成雾滴沉积位置偏移。
2 对靶施药雾滴沉积预估模型
通过分析对靶施药的工作原理和作业特点,确定了影响雾滴沉积位置偏移的主要因素为系统信号误差和延迟。高效准确感知喷头位姿信息和状态参数,为准确预估雾滴沉积覆盖区域的前提,是控制喷头及时响应实现雾滴定向沉积的关键。
2.1 喷头位姿感知
高分辨率对靶施药作业要求控制系统具有极快的喷头位姿信息更新频率,而大部分GNSS硬件更新频率有限,大都以5~20 Hz为主,并不能满足高分辨率对靶施药实时性的要求。
受到土质、水分等因素影响,不同农田区域土壤坚实度存在显著差异,使得行走轮沉陷程度不一,使用接触式传感器难以获得准确数据,而非接触式传感器(如惯性测量单元(Inertial measurement unit,IMU))数据更新频率可达200 Hz,能够在较短时间内通过计算连续获得机车位置、速度、航向等行走信息。当保持IMU坐标轴线与机车行驶方向一致时,进行GNSS数据和IMU的数据融合,根据喷头与定位定向天线的空间结构位置关系,便可获取喷头的实时运动状态参数[21]。
2.2 喷头位姿描述
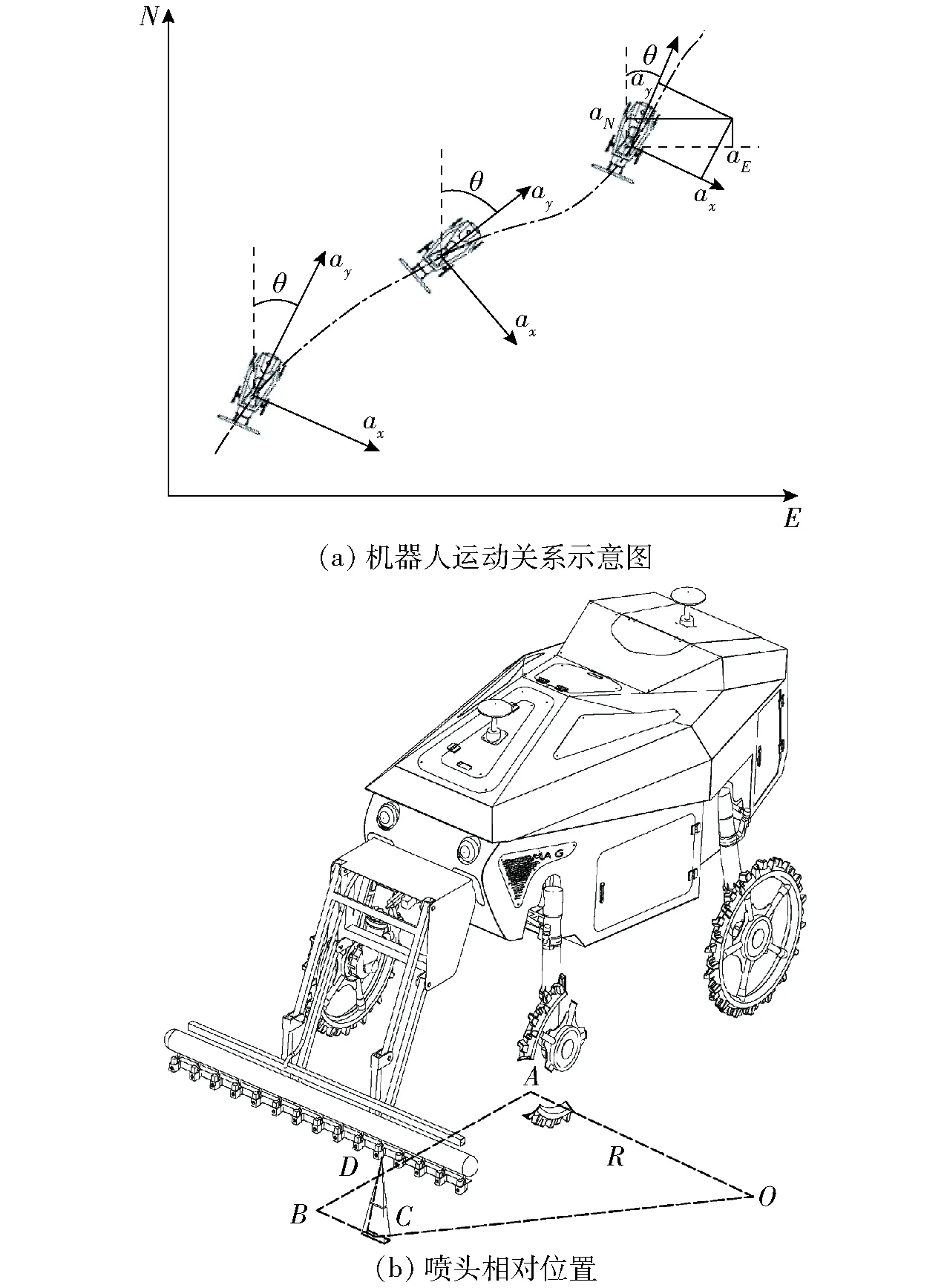
图2 喷头运动关系转换Fig.2 Nozzle motion relationship conversion
喷头与机器人连接关系视为刚性连接,喷头随机器人的连续运动,可看作喷头在水平面内的二维递推运动,如图2a所示,机器人初始位置投影坐标为(E0,N0),初始航向角为θ0,喷头与定位定向天线的结构位置关系如图2b所示。
为方便进行喷头位姿描述,规定喷头朝向角为其随机器人前进方向的北向夹角,与机器人航向角相同[21]。IMU安装于定位天线正下方,根据图2所示,喷头朝向角计算式为
(1)
式中ω——IMU陀螺仪所测机器人角速度,rad/s
IMU获得喷头加速度分量为
(2)
(3)
式中ax——IMU传感器获得的车体沿x方向加速度,m/s2
ay——IMU传感器获得的车体沿y方向加速度,m/s2
lBC——喷头与机器人中轴线的横向距离,m
lAB——喷头与机器人后轴线的纵向距离,m
喷头加速度在导航坐标系中的分量为
aDE=aDysinθDt+aDxcosθDt
(4)
aDN=aDycosθDt-aDxsinθDt
(5)
喷头在导航坐标系中的速度分量为加速度的积分,其速度分量为
(6)
(7)
喷头在导航坐标系中的位移分量可表示为对加速度的二重积分,喷头在导航坐标系中的位置分量为
EDt=∬(aDysinθDt+aDxcosθDt)dtdt+E0
(8)
NDt=∬(aDycosθDt-aDxsinθDt)dtdt+N0
(9)
使用GNSS数据描述的喷头位置为
EGkt=-KΔsinθ+lAB+E0
(10)
NGkt=KΔcosθ+lABsinθ+N0
(11)
式中K——中间喷头为起点的编号,K=1代表靠近中间喷头左侧第1个喷头,K=-1代表靠近中间喷头右侧第1个喷头
EGkt——喷头坐标东向投影值,m
NGkt——喷头坐标北向投影值,m
Δ——均匀分布喷头间距,m
2.3 喷头位姿估计
使用的GNSS和IMU传感器为相互独立器件,需GNSS/IMU传感器的数据空间配准后,采用具有鲁棒性好、动态性能佳、实时精度高等特性的松耦合卡尔曼滤波算法进行喷头位姿数据融合,以获取喷头高频位姿信息,喷头位姿估计系统架构如图3所示。

图3 喷头位姿估计系统架构Fig.3 Nozzle attitude estimation system architecture
在该系统中喷头位移为连续运动,GNSS和IMU传感器信息均为离散型数据,参考卡尔曼滤波差分方程描述方法,离散化的喷头位姿状态模型和观测方程可表示为[22]
Xk=Ak,k-1Xk-1+BUk-1+ΓkWk-1
(12)
Zk=HkXk+Vk
(13)
其中
(14)
式中Xk——k时刻的喷头位姿状态估计量
Ak,k-1——k-1时刻到k时刻的喷头运动状态转移矩阵
B——控制矩阵Uk-1——控制输入
Γk——系统噪声影响矩阵,表示由k-1时刻到k时刻各个喷头状态量噪声影响各个状态量的程度
Wk-1——k-1时刻的系统噪声
Zk——k时刻的观测矢量
Hk——k时刻的观测矩阵
Vk——k时刻的观测噪声
根据卡尔曼滤波递推关系,进行相关参数预测,即
(15)
(16)
Q——系统过程协方差矩阵,根据传感器误差和喷头沉积情况设定初始值
卡尔曼滤波参数更新为
(17)
(18)
(19)
式中Kk——卡尔曼增益
Pk——更新后的协方差矩阵,根据传感器误差和喷头沉积情况设定初始值
R——协方差矩阵H——观测矩阵
I——单位矩阵
通过GNSS/IMU信号融合,得到各喷头的位姿分量最优估计值,分别记为喷头朝向角kθ,喷头坐标投影值kE、kN,喷头速度分量kvE、kvN。
3 雾滴定向沉积控制
3.1 雾滴沉积位置估计
参考喷头对靶施药覆盖区域坐标求解方法[13-14],雾滴沉积预估中心位置可表示为
(20)
(21)
m——雾滴质量,kg
η——液滴与空气的摩擦因数
t——液滴在空气中的总运动时间,s
3.2 喷头控制规则
(p0p1×p0S)(p2p3×p2S)≥0
(22)
(p3p0×p3S)(p1p2×p1S)≥0
(23)
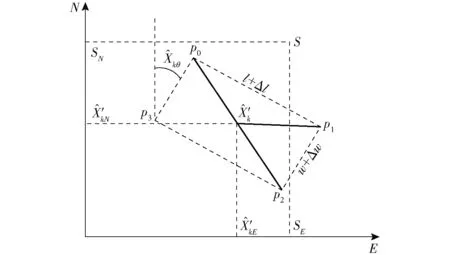
图4 喷头响应边界示意图Fig.4 Nozzle response boundary diagram
为避免田间靶标物体空间分异性对施药准确性的影响,可通过调节Δl和Δw改变喷头响应范围,降低作业分辨率,以应对较大尺寸靶标物体,提高植保装备对靶施药准确率。
3.3 喷头响应控制系统
喷头响应控制流程图如图5所示。
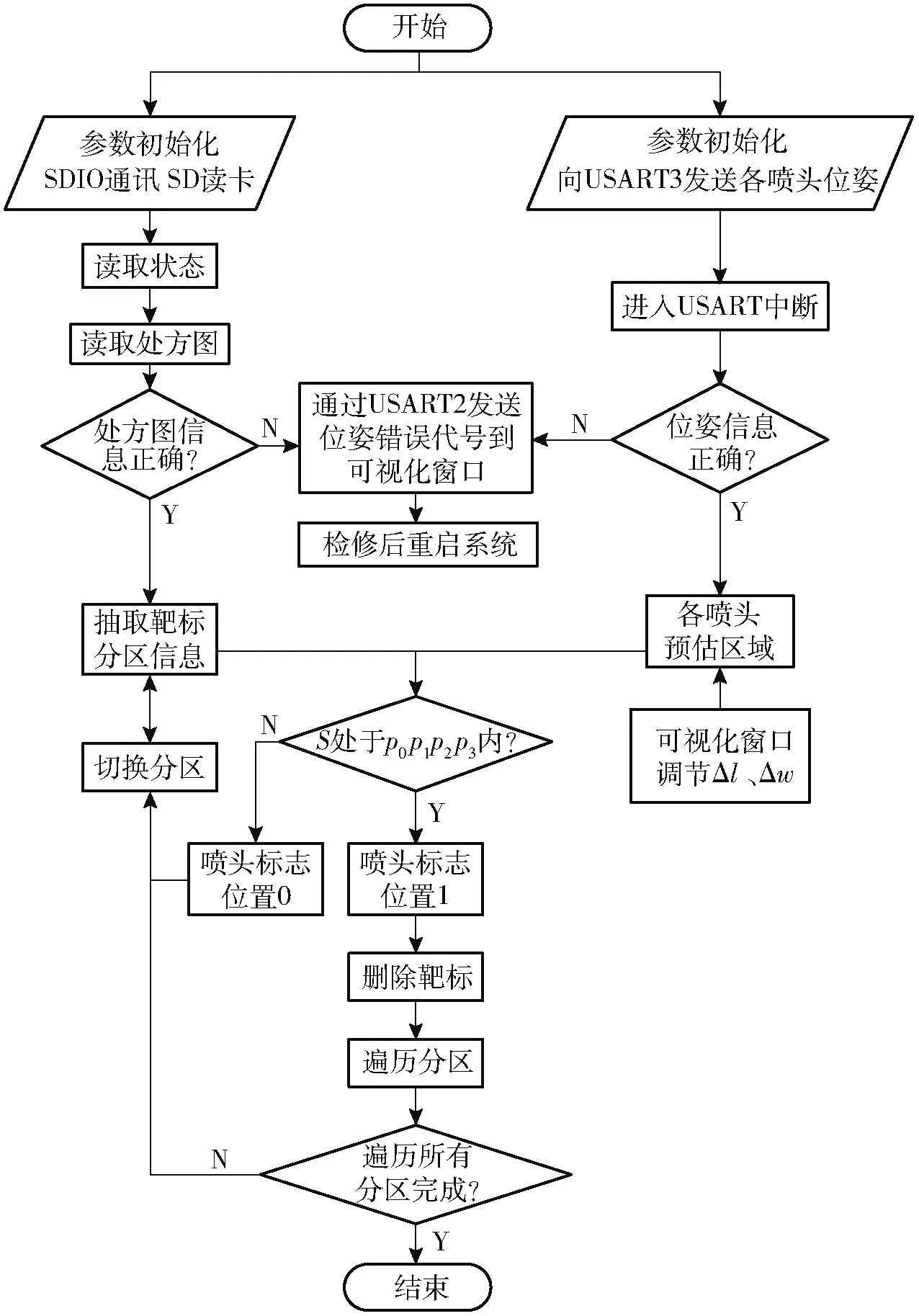
图5 喷头响应控制流程图Fig.5 Nozzle response control flow chart

图6 对靶施药系统电路链接示意图Fig.6 Schematic of circuit link to targeted spraying system
对靶施药系统电路如图6所示。对靶施药机器人通过60 V锂电池供电,通过底盘控制箱降压至24、12、5 V,对底盘行走系统、GNSS系统、对靶施药控制系统等进行供电。对靶施药控制系统以STM32F407ZGT6为核心,根据各喷头估计覆盖区域,与内存卡中处方图靶标信息进行匹配,匹配成功后通过核心板I/O口发送1/0指令给光电隔离驱动板控制对应喷头响应动作,直至完成对靶施药作业。
4 试验与结果分析
对靶施药控制系统喷头单次响应时间极短,难以通过作业过程中的系统滞后时间检测方法进行测量。鉴于对靶施药的雾滴沉积位置可见性,使用雾滴沉积偏移位置检测方法可间接评价系统的信号误差和延迟。为验证基于雾滴沉积位置预估的对靶施药喷头控制方法,在机器人作业速度范围内,开展对靶施药控制方法验证与性能评价试验[18-19]。
4.1 试验条件
试验于2021年5月15日—6月25日在黑龙江省哈尔滨市香坊区向阳试验基地进行,试验场地分别为基地田间道(平整场地)和玉米田。基地位于126.92°E,45.77°N,地势平坦,田间试验玉米生长时期为3~5叶期,株高为350~540 mm,设置悬挂高度约为600 mm,当前高度雾滴覆盖尺寸约为158 mm×60 mm。田间杂草密度为3~126株/m2,杂草俯视外接圆直径为55.0~232.2 mm。试验期间地面空气流速为0.5~1.6 m/s,天气多云,白天平均温度13~21℃。试验设备为对靶喷施机器人、高精度测地仪、大疆精灵4 RTK无人机等。
为便于开展雾滴沉积偏移距离数据获取,经测试,选择使用油漆模拟靶标物体,通过无人机(大疆精灵4 RTK)获取地面图像,并使用文献[23]中的图像处理方法,获取校准后的图像靶标位置,使用高精度测地仪(上海华测i50型,精度±2.5 mm)进行靶标位置的精度验证,靶标位置偏差平均值为6 mm,地面模拟靶标物体识别准确率为100%,试验设备及场地情况,如图7所示。
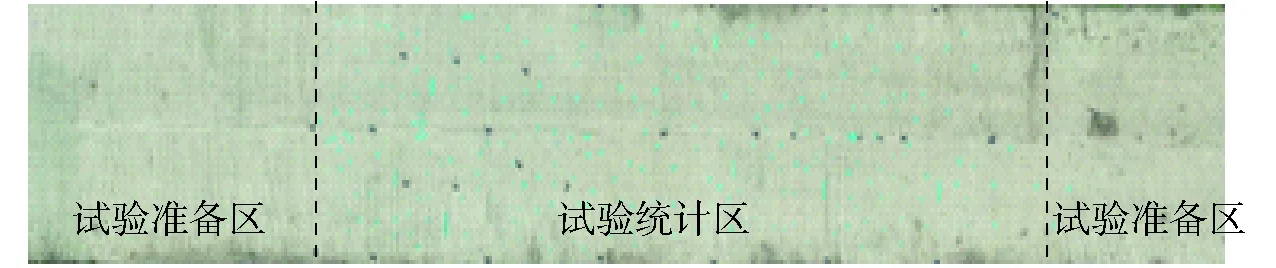
图7 试验设备及场地Fig.7 Test equipment and site
4.2 试验方案
将GNSS/IMU信号融合雾滴沉积位置预估喷头控制方法、基于GNSS信号雾滴沉积位置预估喷头控制方法、GNSS/IMU结构解算(喷头相对定位点的结构关系,2.2节)喷头控制方法、GNSS结构解算喷头控制方法开展对比试验。对比因素为机器人自动驾驶区间内的作业速度为0.5、1.0、1.5、2.0 m/s,试验指标为对靶施药准确率和雾滴沉积偏移距离。其中,雾滴沉积偏移距离为雾滴沉积中心与油漆模拟的靶标物体中心距离,对靶施药准确率计算式为
(24)
式中Ac——对靶施药准确率
Yc——雾滴覆盖样本数
Zc——喷施区域靶标样本总数
在完成平整场地模拟试验后,选取符合大田对靶施药作业准确率要求的组合,进一步开展大田对靶施药验证。
机器人在试验准备区前进速度稳定后,进入对靶施药模拟区域,每次试验重复3次,以每次试验结果的平均值为评价标准。使用文献[18-19]中的方法进行评价。
4.3 试验结果与分析
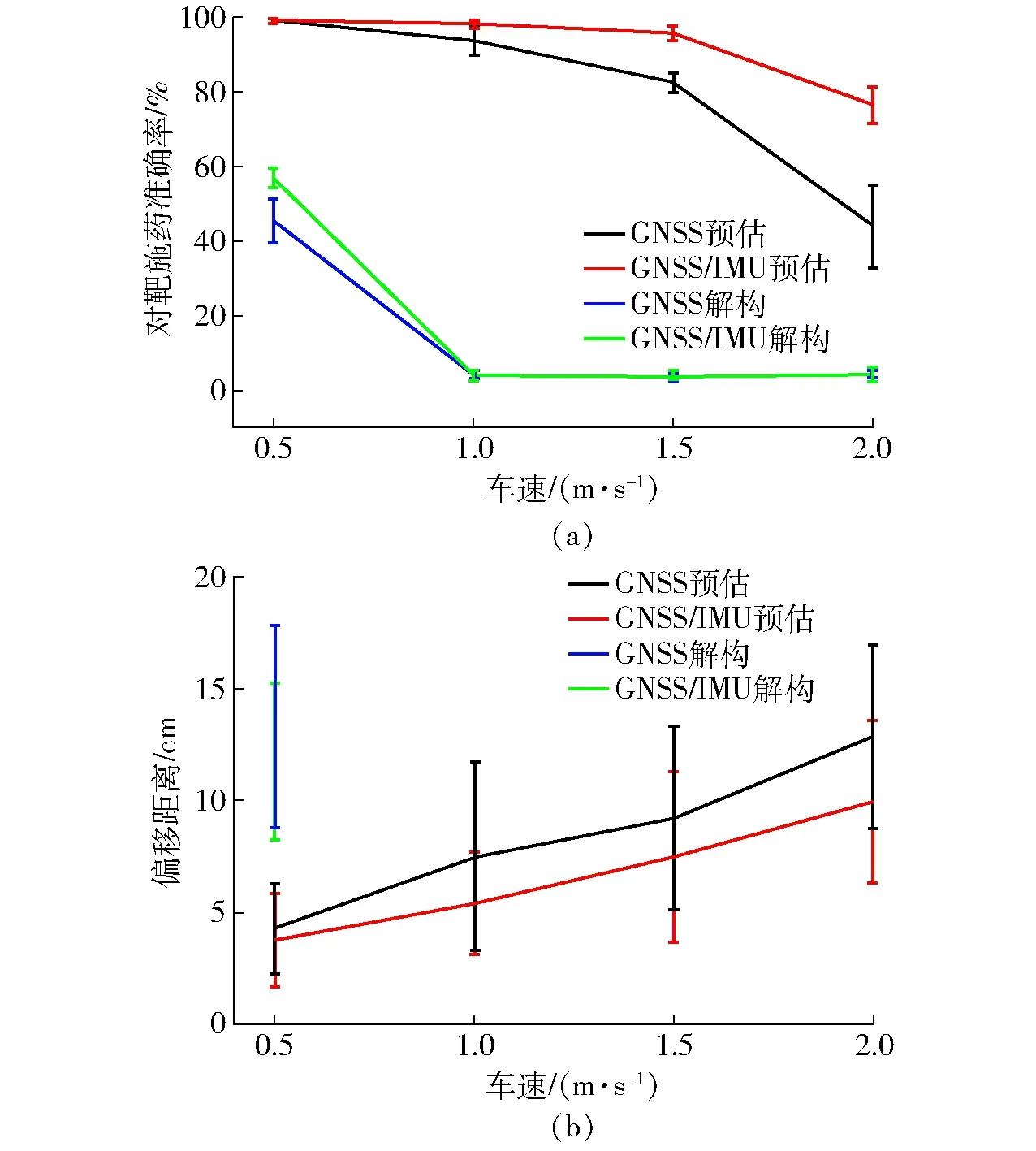
图8 对比试验结果Fig.8 Results of contrast test
机器人试验结果如图8所示。由图8可知,使用GNSS/IMU信号融合预估控制方法的对靶施药平均准确率和雾滴沉积偏移距离分别为92.6%、6.7 cm,优于GNSS预估控制方法的80.0%、8.5 cm,性能分别提高了15.8%、21.1%。使用GNSS/IMU结构解算方法的对靶施药平均准确率为1.6%,使用GNSS结构解算方法的对靶施药平均准确率为2.3%,在作业速度为0.5 m/s时,雾滴沉积偏移距离分别为11.8、13.3 cm。当作业速度大于1 m/s时,雾滴沉积偏移距离过大,由于靶标分布距离较近,出现了雾滴沉积偏移后仍将覆盖靶标区域覆盖的情况,造成了准确率统计值偏大。雾滴沉积预估喷头控制方法对靶施药的平均准确率比结构解算喷头控制方法高97.6%。出现该情况的原因,可能是没有进行雾滴沉积位置的预估,造成沉积位置滞后,试验结果表明:结构解算喷头控制方法不能满足对靶施药作业需求。因此,下文仅对雾滴沉积预估的喷头控制方法进行分析、讨论。
由图8a可知,随着机器人作业速度的增加,对靶施药准确率下降。当作业速度为0.5 m/s时,GNSS/IMU信号融合预估控制方法和GNSS预估控制方法对靶施药准确率分别为99.8%、99.6%,作业速度大于0.5 m/s时,GNSS/IMU信号融合预估控制方法的施药准确率高于GNSS预估控制方法的对靶施药准确率。这是由于机器人在低速行驶时,GNSS数据更新频率满足低速作业要求。当作业速度分别为1.0、1.5、2.0 m/s时,GNSS/IMU信号融合预估控制方法的施药准确率分别为98.4%、95.9%、76.5%,GNSS预估控制方法的施药准确率分别为93.8%、82.5%、44.0%,说明机器人以较快速度行驶时,GNSS/IMU信号融合预估控制方法可提高对靶施药准确率。当作业速度大于1.5 m/s时,GNSS/IMU信号融合预估控制方法和GNSS预估控制方法的施药准确率均出现明显下降,但GNSS/IMU信号融合预估控制的下降速率小于GNSS预估控制,说明在当前作业分辨率尺度下,使用GNSS/IMU信号融合预估控制方法提高了对靶施药准确率。
由图8b可知,随着机器人作业速度的增加,对靶施药过程中的雾滴沉积偏移距离增加。当作业速度为0.5 m/s时,GNSS/IMU信号融合预估控制方法和GNSS预估控制方法的偏移距离分别为4.3、3.8 cm,GNSS/IMU信号融合预估控制方法的标准差比GNSS预估控制方法的标准差低0.07 cm,进一步验证了机器人低速行驶时,GNSS预估控制方法可满足作业需求,且在当前速度下作业,大部分雾滴沉积覆盖居中性较好,如图9a所示。作业过程中,虽然沉积雾滴实现了靶标区域的全覆盖,但在作业时存在拖尾现象,如图9b、9c所示,可能是形成沉积偏移距离统计结果较大的原因。当作业速度为1.0 m/s时,GNSS/IMU信号融合预估控制方法和GNSS预估控制方法的偏移距离分别为5.4、7.5 cm。当作业速度为1.5 m/s时,GNSS/IMU信号融合预估控制方法和GNSS预估控制方法的偏移距离分别为7.5、9.2 cm,均有不同程度的雾滴沉积缝隙,如图9d所示,出现缝隙的原因可能是由于电磁喷头响应频率有限导致。当作业速度为2 m/s时,GNSS/IMU信号融合预估控制方法和GNSS预估控制方法的偏移距离分别为10.0、12.9 cm,GNSS预估控制方法的作业效果如图9e所示,雾滴沉积位置出现了较大的偏移,且对靶施药准确率较低。GNSS/IMU信号融合预估控制方法作业的大部分效果如图9f所示,虽对靶施药准确率较高,沉积面积较大,但对小目标靶标物体易形成漏喷,沉积尺寸远大于目标尺寸,经过测试,小目标物体形成漏喷的主要原因为电磁阀频率较低不能及时响应造成。通过试验表明,靶标物体聚集区域内密度越高,对靶施药准确率越高,越不容易形成漏喷,如图9g中部聚集区域所示。同时,靶标物体的识别准确率也将直接影响对靶施药准确率,因此,在正常作业过程中,应首要保证靶标物体的识别准确率。
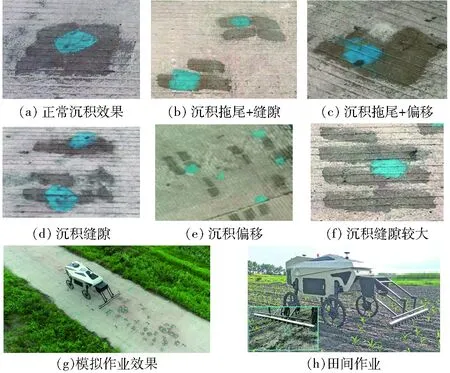
图9 作业效果对比Fig.9 Comparison of operation effects
为进一步验证机器人田间对靶施药性能,开展玉米大田对靶除草试验验证。使用无人机获取田间正射影像,用YOLO v5进行田间杂草检测形成处方图,控制机器人进行对靶施药作业。目前对靶施药除草相关作业标准空缺,参考GB/T 36007—2008[24]及文献[25]对靶施药作业除草率,选择模拟试验中准确率大于95%的组别开展田间试验验证。因此,选择GNSS/IMU信号融合预估控制方法在作业速度0.5、1.0、1.5 m/s,和GNSS预估控制方法在作业速度为0.5 m/s,开展大田对靶施药验证试验。由于田间喷雾后药液散失较快,无法进行偏移距离统计,因此,仅统计对靶施药准确率。将水敏纸固定在无遮挡的杂草上,作为靶标物体,试验结束后,通过统计水敏纸着色情况,判断对靶施药准确率[26]。通过试验结果可知,GNSS/IMU信号融合预估控制方法的田间试验施药准确率平均值分别为98.7%、96.7%、95.3%,平整地面的施药准确率平均值分别为99.8%、98.4%、95.9%,分别降低1.1、1.7、0.6个百分点。可能是由于田间地势起伏造成悬挂晃动使得对靶施药准确率降低[27]。为检验田间对靶施药除草效果,作业完成14 d后进入田间查看并统计杂草灭杀效果,杂草灭杀率分别为99.1%、97.2%、95.9%、98.2%,这可能是由于作业过程中药液漂移造成统计结果偏高,或在喷洒作业过程中已经喷洒到了杂草叶片上,但没有沉积在水敏纸上,造成前期统计结果偏低。同时,在未喷洒区域,有数量较少的新生杂草出现,通过追踪调查发现,不会对后期玉米生长产生影响,因此并未列入统计结果。
通过以上分析可知,对靶施药作业过程中使用GNSS/IMU信号融合的雾滴沉积位置预估喷头控制方法,可提高对靶施药精准度,减小雾滴沉积偏移误差。与GNSS信号雾滴沉积位置预估喷头控制方法相比,对靶施药平均准确率提高了12.6个百分点,雾滴沉积平均偏移距离减小了1.8 cm。对靶施药与变量施肥、精准播种作业场景相比,作业精准度要求更高,信号处理速度要求更快。为实现更高分辨率的对靶施药,应进一步开展高频信号输出、电磁喷头响应、行驶速度波动、压力波动滞后、靶标大小等的相关研究,以解决对靶施药过程中形成的沉积缝隙、作业速度限制等问题[28-32]。从而在保证防效与兼顾效益的前提下,适当提高对靶施药作业分辨率,减小靶标区域外的施药面积,降低环境污染。
5 结论
(1)提出了一种基于GNSS/IMU信号融合的对靶施药喷头位姿估计与雾滴定向控制方法,该方法能够提高对靶施药准确率,减小雾滴沉积偏移距离。
(2)提出了对靶施药模拟试验方法,该方法能够在近乎自然环境下,准确记录对靶施药准确率和雾滴沉积偏移距离。
(3)通过模拟试验对比可知,使用GNSS/IMU信号融合的雾滴沉积位置预估喷头控制方法,能够提高对靶施药准确率,减小雾滴沉积偏移。该研究可为高分辨率对靶施药、施肥、播种等的物料定向控制方法,提供参考依据。
