亚地块尺度秸秆信息丰度研究
2022-08-05丁启朔汪小旵何瑞银徐高明
丁启朔 陈 杰 汪小旵 何瑞银 徐高明 梁 磊
(1.南京农业大学工学院,南京 210031;2.江苏省智能化农业装备重点实验室,南京 210031)
0 引言
目前,秸秆已从原有的农业废弃物概念被定义为可再生生物质资源,导致秸秆信息化技术越发受到重视。秸秆信息化是指按所需应用将秸秆状态、分布、理化特性等信息进行参数化、数量化的过程。秸秆信息应用领域十分广泛,秸秆资源统计[1-2]、保护性农业[3-4]、秸秆资源开发[5]、精确播种[6-7]、作物行农机导航[8-9]、机械灭茬[10]、耕作埋草[11-12]等研究或应用场景都需要不同维度的秸秆信息。
不断扩大的秸秆信息应用领域增加了秸秆量、秸秆覆盖率、碎秸与立茬的分布状况等秸秆信息量(即信息丰度)的获取需求。仅在农业机械的创新设计范畴内,就涉及到收获机排草性能[13-14]、耕作机具秸秆还田性能[13-15]、犁耕埋草作业性能[16]、智能农机导航性能[9]、灭茬机灭茬效果[17]等诸多应用领域。
秸秆信息丰度涉及诸多量化参数,例如,不同生产条件与留茬高度是决定秸秆资源可收集量计算的关键指标[18],直立茬和轮迹倒伏茬状态是影响扶指支撑设计及灭茬机秸秆粉碎效果的2个关键参数[17],保护性农业的免耕种植需要重点解决秸秆堵塞及其测试技术,涉及秸秆抛撒运动规律等信息的参数化[19]。随着秸秆的区域性、季节性、结构性过剩现象不断加剧,加之不断拓展的秸秆综合利用需求[20],秸秆信息丰度的研究内容变得愈加丰富。
秸秆信息具有典型的多尺度特征,其中,秸秆信息场景所处尺度决定着秸秆信息参数的具体用途和采集方法的设计。为此,将相关学者的研究成果分为区域尺度和地块内尺度(本文定义为亚地块尺度)2种秸秆信息的尺度范畴。区域尺度的秸秆信息关注农业生态区的秸秆覆盖状态及其时空分异,此类秸秆信息多使用遥感图像、光谱反射等测试技术及数据反演方法[21-23]。而亚地块尺度下的秸秆信息具有多阈值、多目标等技术特征[24],这些技术特征受亚地块尺度下应用场景间的差异所影响。仅从农机高性能设计所需的秸秆信息看,收割排草[13-14]、秸秆还田[13-15]、智能导航[9]、机械灭茬[17]等应用场景所需的秸秆信息指标各不相同。因此,亚地块尺度下的秸秆信息丰度研究需要全面考察多样化的秸秆信息及其指标化,如在玉米对行播种等应用场合,需要识别并区分出裸露地表、直立根茬和行间碎秸等关键信息[9],“立茬”和“碎秸”状态也是进行针对性机械设计、功率配置及秸秆切碎效果优化的关键信息参数[25]。可见,系统界定亚地块尺度下秸秆信息丰度并探讨其参数化是目前秸秆信息研究亟需解决的重要问题。
目前尚缺乏针对亚地块尺度下秸秆信息丰度的系统研究,已有报道多围绕单一信息指标或仅关注特定应用场景,亚地块尺度下秸秆信息丰度的指标设计和测试方法目前不具有系统性和完整性。秸秆信息指标的定义不完善,秸秆信息指标的测试难度大、复杂性高、秸秆形态多样、秸秆覆盖率等参数获取主观性大、田间测试耗时费力[26]等都是亚地块尺度秸秆信息丰度研究面临的难题。
鉴于此,本文拟以稻茬麦原茬地的秸秆信息丰度为研究对象,利用机器视觉、称量、相关分析等方法探讨亚地块尺度下的秸秆信息丰度及其指标化,为亚地块尺度下秸秆信息丰度研究提供思路。
1 材料与方法
1.1 原茬地秸秆取样方法
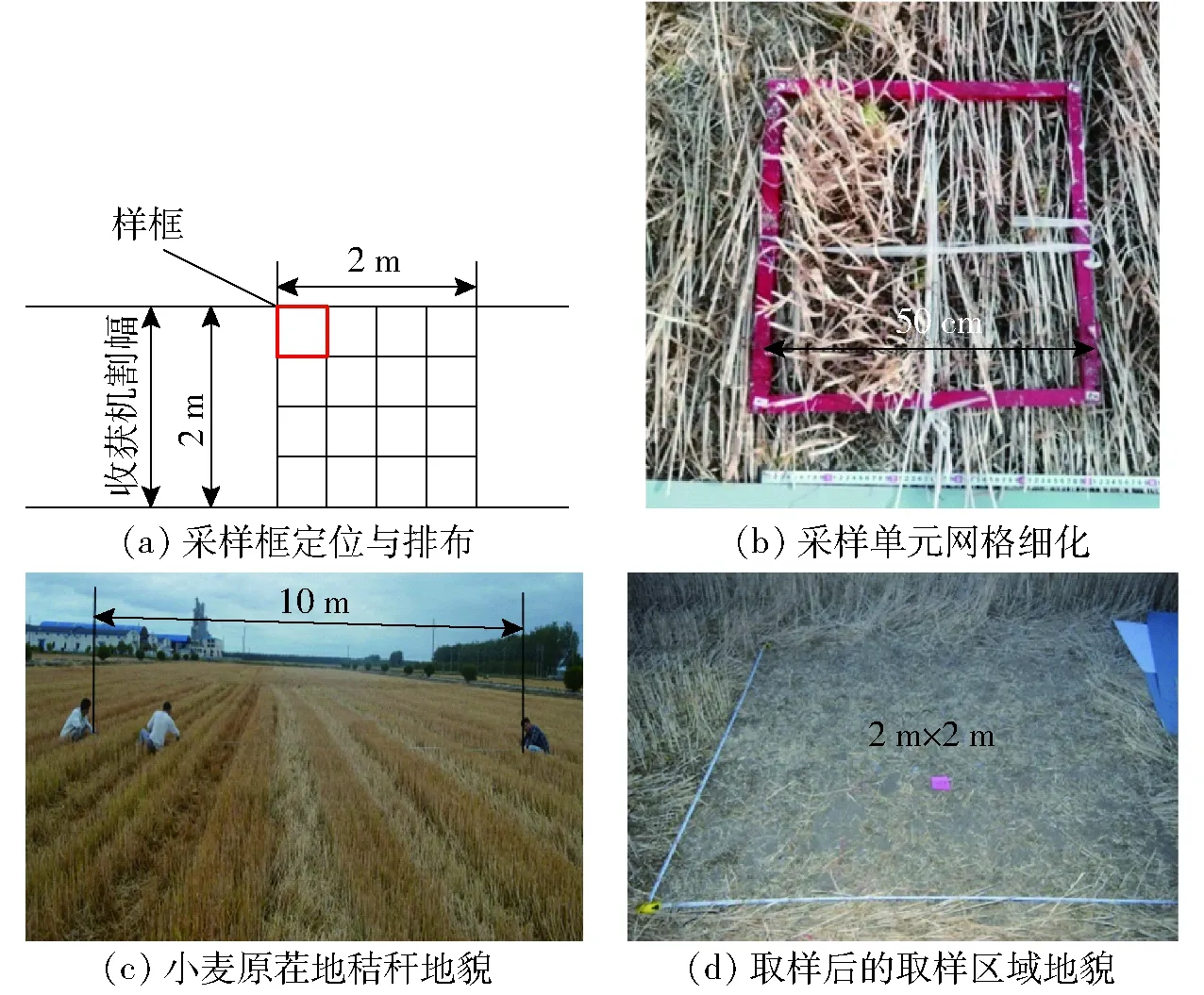
图1 田间秸秆取样方法Fig.1 Field straw sampling method
田间试验于2018年6月上旬在宿迁市泗洪县石集乡(东经117°56′~118°46′,北纬33°08′~33°44′)进行,该区常年稻麦轮作。试验点取小麦原茬地,小麦机收使用久保田688Q型全喂入收获机,功率49.2 kW、割幅2 m、作业速度维持在4.93 m/s内。机收后沿收获机幅宽随机选取边长2 m的方形区域,在该区域内依次排布16个样框(图1a)。进一步在各样框内使用网格法取样[13-14],网格尺寸为25 cm×25 cm(图1b)。先将各网格内的碎秸取出,后沿行向紧邻留茬根部的后方竖立白色背景板并对立茬拍照,拍照完成后用剪刀贴地面剪下各网格内的立茬,带回实验室测试,获取秸秆质量、碎秸堆叠层数、立茬侧影覆盖度等信息参数。地块内秸秆信息研究的场景以及秸秆取样后的地貌特征分别如图1c和图1d所示。
1.2 立茬与碎秸信息化方法
将收集到的64组立茬与碎秸样本进行信息化处理,分别测试各样本的质量、碎秸堆叠层数、立茬侧影覆盖度、碎秸细碎度、立茬倒伏度等信息参数。
各网格内的秸秆质量:分别将所取碎秸与立茬样本置于100℃[27]干燥箱干燥12 h,取出称量并得到碎秸质量ms与立茬质量ml,两者之和即为一个网格内的秸秆总质量M。
地表碎秸堆叠层数:使用平板匀铺图像法测试秸秆堆叠层数,将每个网格中的碎秸单层均匀匀铺在带有7.5 cm×7.5 cm基准块的白板上(图2a,图中黑色方块为7.5 cm×7.5 cm的基准参照物),使用尼康NiKon D3200型数码相机拍摄获取数字图像,相机置于白板正上方1.5 m位置[28]。使用Matlab程序计算秸秆单层覆盖面积(图2b),并参照已有方法计算秸秆堆积层数[29]
(1)
式中SL——堆叠层数
Sl——碎秸单层覆盖面积,cm2
Sd——碎秸覆盖面积(网格面积),cm2
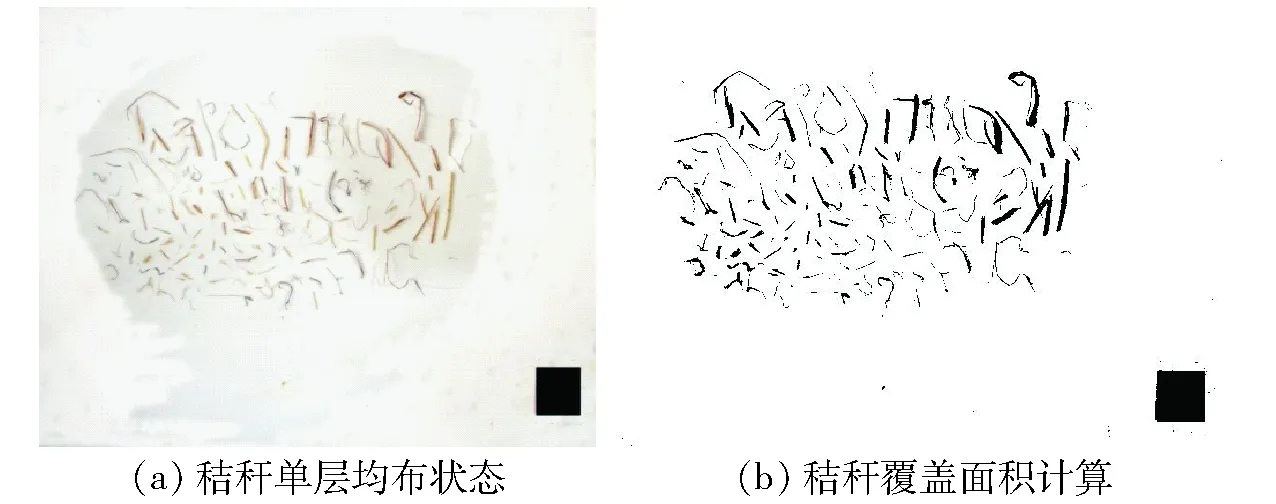
图2 堆叠层数图像测试方法Fig.2 Image testing method of stacked layers
立茬侧影覆盖度LC是定量立茬高度、宽幅及疏密程度等形态结构特征的指标[30-31],计算式为
(2)
式中S——取样网格面积,cm2
A——取样网格内立茬的侧影面积,cm2
使用背景板图像法测试立茬侧影覆盖度,将白色背景板置于样框内立茬后方拍摄,如图3所示。拍照过程中选用刻度尺作为标定物进行图像标定。使用尼康NiKon D3200型数码相机,在距离2 m且离地高度30 cm处拍摄,获取秸秆立茬数字图像。使用Digimizer逐张处理,得到总投影面积A。由式(2)得到侧影覆盖度。

图3 立茬投影面积的测试方法Fig.3 Test method of standing stubble projected area
碎秸细碎度:使用碎秸长度作为碎秸细碎度的定量指标。使用筛分法测取碎秸的平均直径,分别使用2、4、6、8、16 mm筛孔的筛子手动筛分,计算各网格内的碎秸平均直径[32]
(3)
式中D——碎秸平均直径,mm
di——2个筛孔间的碎秸平均长度,mm
msi——存留在i级筛面上的碎秸质量,g
计算出各网格内碎秸平均长度D并以2D图像方式显示碎秸细碎度的地表分布状态。
立茬倒伏度:采用人工观察计数法统计每个样点的立茬状态和数量,获得倾斜角低于60°的立茬比例进行立茬倒伏度测量。并将立茬倒伏状态数据以2D图像方式显示。
1.3 碎秸单层覆盖面积与质量相关分析
在上述秸秆信息各指标测试量化的基础上,进一步分析原茬地秸秆的各信息量之间的关系。将未被过度破碎的长草近似视为半径为r、长度为l的柱状体,则有碎秸单层覆盖面积与碎秸质量关系
Sl=2ms/(ρr)
(4)
式中ρ——秸秆密度,g/cm3
当秸秆半径r与秸秆密度变化范围不大时,Sl与ms呈正相关。
定义碎秸面积-质量相关系数f为
(5)
f越大,表明秸秆细碎化程度越高。
1.4 立茬侧影面积与立茬质量相关分析
立茬侧影面积与立茬质量间的相关性也能在一定程度上反映原茬秸秆的状态信息,令
g=A-A0
(6)
式中g——立茬的投影面积差值,该值对应立茬的倒伏程度
A0——立茬被机具轧倒前的总投影面积
结合式(2)、(4)建立投影面积A0与质量ml间的正比关系。
将式(6)转换为
(7)
式中g′——立茬投影面积变化归一化差值
A*——A无量纲化值
g′∈(-1,1),该值越大,说明倒伏程度越严重。
1.5 秸秆信息丰度可视化技术
秸秆数据的图形化与图像化是直观呈现多维秸秆信息的一种方式。将各信息指标的相关性信息数据转化为8×8矩阵,并使用Matlab软件将所得秸秆信息图形化。
在对各组数据进行相关分析之前,对数据进行无量纲化处理[33]
(8)

使用矩阵相似度(也称为图像相似度)计算方法[34]处理所得数据,得到秸秆不同信息量间的相关系数
(9)
式中X、Y——进行相似度计算的两组数据矩阵
R——相关系数
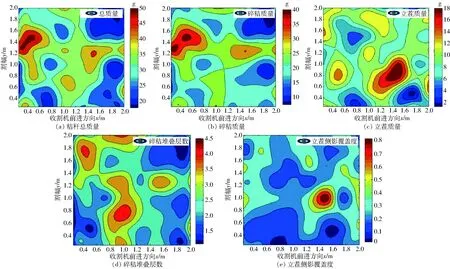
图4 原茬地秸秆各参数的地表分布状态Fig.4 Distributions of key parameters of straw and stubble within a field
R∈(-1,1),R越接近-1或1,则两个矩阵相似度越高,越接近0,则相似度越低。
2 结果与分析
2.1 小麦秸秆质量与各形态信息参数的原位分布特征
图4为原茬地秸秆5个信息的地表分布状态。由图4a可知,总体上,总质量最大值为50.54 g,最小值为19.93 g,平均值为33.39 g。其分布呈中心十字状的集聚现象,富集网格内的秸秆总质量在35~50 g之间变化,其他区域分布较少,多在20~30 g之间。
碎秸质量分布(图4b)表现出较好的分布均匀性,在一定程度上反映出收获的后置出草口的匀铺性能。与以往田间调查[13]所得秸秆铺放不均的结论相比,现有的收获机的碎草和匀铺性能已有明显改进。总体上,碎秸质量最大值为41.24 g,最小值为12.03 g,平均值23.23 g,集中分布在割幅中间(y∈(0.8 m,1.8 m)),该位置属于后置出草口喷口经过的区域。
立茬质量分布(图4c)显示,立茬质量最大值为18.64 g,最小值1.54 g,平均值10.16 g,主要集中在图像矩阵坐标点(0,1.6 m)、(0.5 m,0.8 m)、(1.1 m,1.2 m)、(1.5 m,0.8 m)、(2 m,1.8 m)、(2 m,0.6 m)所对应的网格内,影响该信息指标的因素是来自小麦播种行的行间距分布及其与取样网格的位置关系,因此对该信息的解读较为困难。
地表碎秸的堆叠层数分布(图4d)显示,机械收获后的秸秆覆盖状态及秸秆堆叠层数,该信息受收获机排草口的流量影响。图中碎秸堆叠层数最大值为4.33层,最小值为1.12层,平均值为2.56层。由图可见碎秸沿收获机前进方向的中间区域(x∈(0.6 m,1.2 m)),堆叠程度较高,均处于3层以上,且也表现出行进方向堆叠的不均匀性。碎秸堆叠的影响因素较多,除排草口的流量外,收获机的行进速度稳定性、物料在收获机内部的分布均匀性、逐稿器设计合理性及动作连续性等都可能影响到碎草堆叠的地表分布。
立茬侧影覆盖度分布(图4e)表明,在经过收获机碾压倒伏之后的直立茬分布特征,总体上,立茬侧影覆盖度最大值为0.78,最小值为0.03,平均值为0.28。该信息分布图显示机收对直立茬的影响较大。稻麦轮作区因机收季节土壤湿烂而普遍使用履带式底盘,因此对直立茬的轧倒破坏较为严重。
2.2 秸秆信息相关分析与校验
2.2.1秸秆信息相关分析
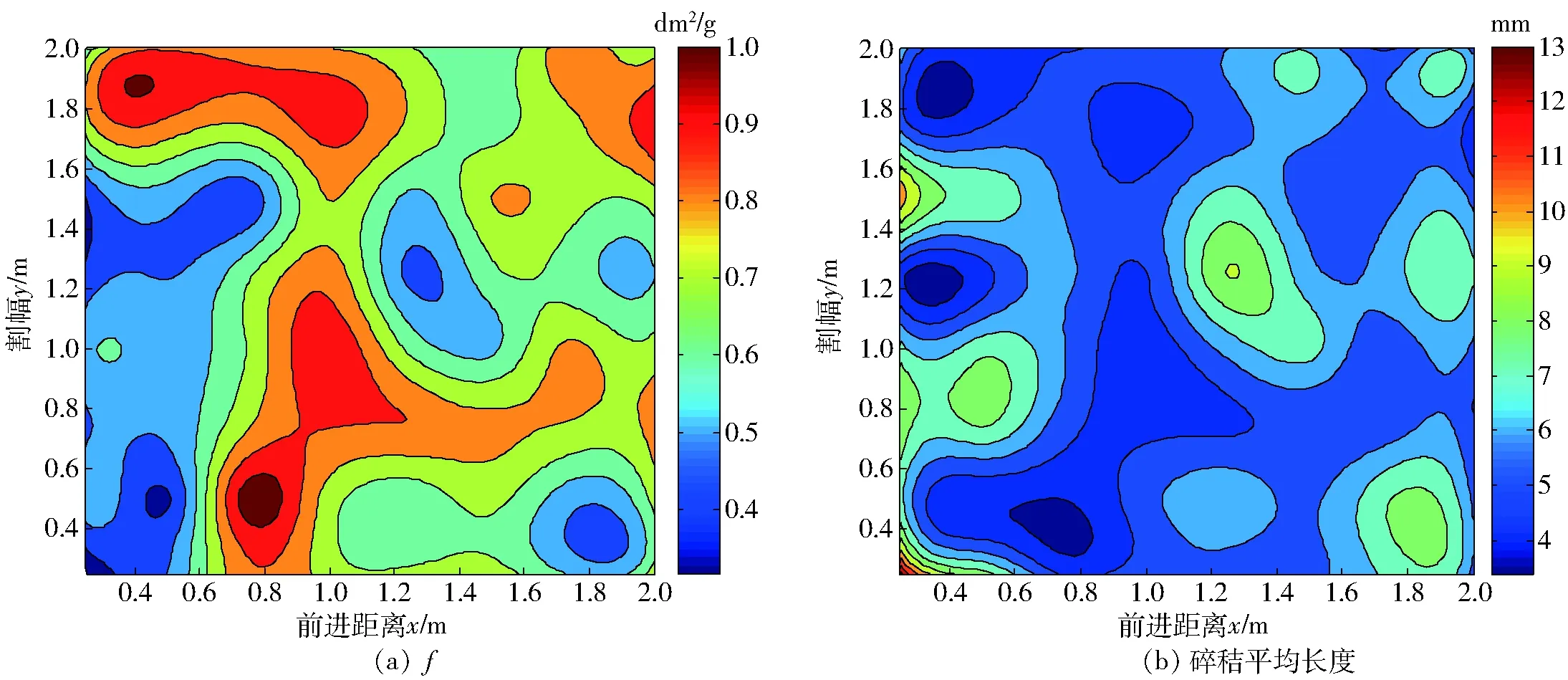
图5 碎秸面积-质量相关系数分布与人工测试的秸秆细碎度对比Fig.5 Comparisons of area-mass ratio distribution using machine vision and manual measured straw distribution
将地表秸秆总质量(图4a)分别与碎秸质量分布(图4b)、立茬质量分布(图4c)进行图像相似度计算,使用公式(9)得出地表秸秆总质量与碎秸质量相似度rab=0.89、与立茬质量相似度rac=0.43,表明不同秸秆信息间的相似度差别较大。从图像的视觉效果也可直观看出,秸秆总质量分布与碎秸质量分布的极值点位置及数据的平面波动特征非常接近,因此,碎秸质量分布对总质量分布的影响更大,秸秆匀铺尚需要进一步优化设计收获机的清选排草装置,同时也需要探讨收获机田间作业条件下的环境稳定性控制技术,进一步提高抗风扰、机组工况行进稳定性等前沿技术。
将碎秸质量分布(图4b)与碎秸堆叠层数(图4d)使用公式(9)进行图像相似度计算,得出rbd=0.64。结合直观视觉效果可见,除x∈(0.6 m,1.5 m)的条状区域外,其余网格区域在极值点的所处位置和数据变化2D趋势方面也高度相似,而横坐标x∈(0.6 m,1.5 m)所属区域,正是所得到的碎秸堆叠层数较高的区域,因此,深入探讨不同秸秆信息指标之间的内在联系不仅有利于提升秸秆信息丰度的质量内涵,更有利于实现高秸秆信息丰度的信息降维技术。
将立茬质量分布(图4c)与立茬侧影覆盖度(图4e)进行图像相似度计算,得出rce=0.48,该数值较低表明收获机对立茬的直立状态破坏程度较大,使得图像发生了较大变化。同样,结合图4c与图4e的直观视觉效果可见,除了x∈(0.8 m,1.5 m)处的立茬未受影响,其它立茬均不同程度被收获机轧倒。
2.2.2碎秸单层覆盖面积与碎秸质量相关性校验
碎秸的单层覆盖面积与碎秸质量的相关系数f准确性尚需人工校验。首先通过机器视觉法得出f的分布(图5a),将其与手工测试的秸秆细碎度分布(图5b)对比。
进一步将图5a与图5b进行相关分析,计算得到二者间的相似度R=-0.722。说明基于机器视觉技术的碎秸堆叠层数信息与人工测量的碎秸细碎状态具有较高的相关性。
图5a与图5b均能表达秸秆的细碎化程度及其分布状态,对于图5a,碎秸面积-质量相关系数f平均值为0.704 2 dm2/g,变化范围在0.317 2~1.060 8 dm2/g之间;对于图5b,秸秆平均长度最大值为13.44 mm,最小值为4.02 mm,平均值为6.12 mm。该信息可以表征收获机的碎草性能。图5a进一步表明x∈(0.6 m,1.5 m)区域的秸秆细碎程度较高,同时也是碎秸堆叠层数较高的区域(图4d),该区域对应收获机出草口喷草量较高的位置。在图像x∈(0,0.6 m)与(1 m,1.6 m)处,细碎化程度较低的秸秆在此区域集中出现。
2.2.3立茬的侧影覆盖度信息校验
立茬侧影面积与立茬质量间的归一化差值g′的准确性尚需校验。首先得出该值分布(图6a),将其与人工测取的立茬倒伏度分布(图6b)进行对比。
通过式(9)计算得到图6a与图6b图像相似度R2=0.63,表明机器视觉技术的侧影覆盖度信息与人工测量的立茬倒伏状态具有较高的相似度。
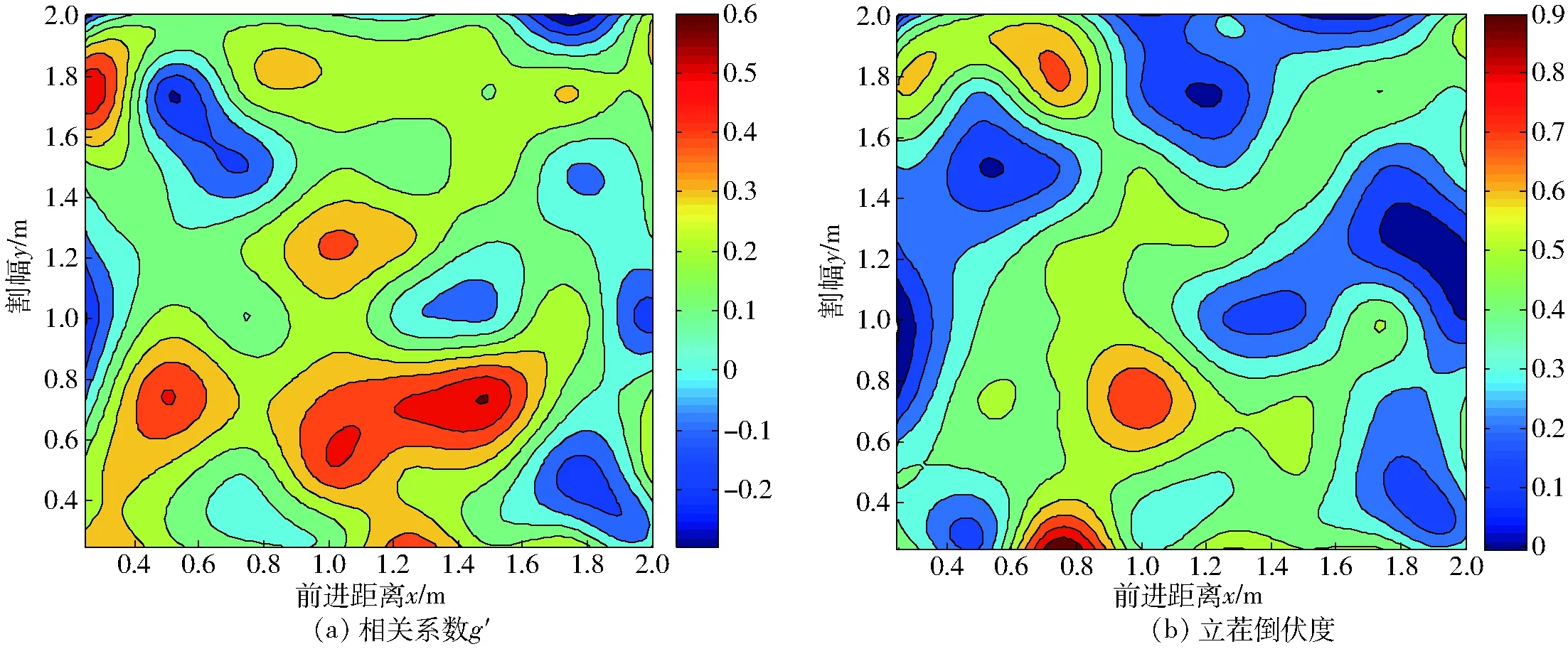
图6 立茬侧影面积与质量归一化差值g′分布与立茬倒伏度分布对比Fig.6 Comparison of correlation ratio g′ with results obtained from manual operation
图6能够直观反映出立茬碾压倒伏的状态,图6a中,x∈(0.20 m,0.50 m),立茬侧影面积与立茬质量的归一化差值的平均值为0.18;图6b中,立茬倒伏度在0~1.0均有分布,其平均值为0.4。南方稻麦轮作制的履带式机收条件下秸秆碾压倒伏普遍较为严重,图像下半部分整体的倒伏程度强于上半部分,这是因为收获机在收获过程中存在路径重叠的情况,尤其是对某区域往返经过时,该区域秸秆会经过两次及以上的碾压,秸秆倒伏加剧。
3 讨论
不同的应用场景需要不同的秸秆信息及相应的测试技术与指标化方法。秸秆资源储量计算[35-37]、保护性耕作地表秸秆覆盖率管控[24,38]等应用场合需要区域大尺度范畴的秸秆信息。而与田间作业机械密切相关的秸秆信息则体现为地块尺度内的秸秆信息参数化,涉及收获机的排草性能[13-14]、耕作机具的秸秆还田性能[13-15]、犁耕埋草作业性能[16]、智能农机导航性能[9]、灭茬机的灭茬效果[17]等应用场景。因此,界定地块尺度下的秸秆信息丰度有利于秸秆信息化研究的进一步聚焦。亚地块尺度下的原茬地秸秆信息丰度高,信息化指标多样,所需适配的多样化信息化技术亟待开发和深入研究。已有的部分秸秆信息的报道均为各单项田间试验研究成果,秸秆信息丰度作为一个完整的信息科学研究问题,尚没有得到系统的梳理和探究。现有秸秆还田效应研究[39-40]、地表秸秆量化[14]、生物量估计[41]等研究与应用场景分别使用了不同的秸秆信息指标,尚缺少具体生产应用场景的综合性秸秆信息丰度体现。本文初步系统地探讨了的小麦原茬地秸秆信息丰度(秸秆总质量、碎秸质量、立茬质量、碎秸堆叠层数、立茬侧影覆盖度等),进而展示亚地块尺度下秸秆信息研究的复杂性及其潜在应用。所得结果表明,亚地块尺度下秸秆信息丰度有利于促进田间作业机械的设计合理性、促进土壤-作物-机器耦合关系等议题的研究。
秸秆信息研究的关键难题在于各指标的信息化技术。比如,地表秸秆存量、可收集的小麦秸秆资源量等秸秆资源信息可以通过遥感影像间接获取增强型植被指数(MODIS-EVI)[37],光谱指数与秸秆覆盖度的线性回归模型也是进行秸秆覆盖度反演的最优策略[22]。然而,王春雷等[26]指出,田间秸秆的信息化技术应用的干扰因素源于多方面:地表在不同光照下呈现的颜色变化、纵横的沟壑与不规则的土块、不同角度的光照及其产生的阴影、农业机械作业留下的不规则车辙等。另外,秸秆的形状、大小和姿态也呈现多样,这些因素均为细碎秸秆的信息化识别技术的研发难点。由本文所得结果可见,亚地块尺度下秸秆信息丰度研究所需技术环节众多,无论是所用的背景板辅助、关键环节的人工操作、秸秆平铺处理,还是立茬侧影等指标化定量化处理技术,后续各指标间的内在联系分析挖坑技术、秸秆信息指标与各机械化作业环节之间的关联分析,各方面都需要大量的理论创新和技术突破,以适应信息化智能化农业的要求。
4 结论
(1)以秸秆信息应用场景的尺度作为判据界定出亚地块尺度下的秸秆信息丰度的研究问题,并设计出碎秸质量分布、立茬质量分布、地表碎秸的堆叠层数分布、立茬侧影覆盖度分布等留茬与碎草的信息参数,应用于小麦原茬地的秸秆信息丰度研究。
(2)系统应用数字图像处理、基于背景板的立茬图像法、基于平板单层匀铺的秸秆质量-图像关系等多种信息化手段,研究了原茬地小麦秸秆多维信息。单位区域(25 cm×25 cm)的秸秆总质量、碎秸质量、立茬质量分别在19.53~50.54 g、12.03~ 41.24 g、1.54~18.64 g之间变化,各指标在收获机全幅宽的观测范围内呈现出2D分布特征且能够在一定程度上反映出收获机的结构设计与农艺特色。
(3)秸秆信息图像的相关分析反映出各秸秆信息间的联系及机具的田间作业效果,地表秸秆总质量与碎秸质量相似度rab为0.89、与立茬质量相似度rac为0.43。碎秸质量分布与碎秸堆叠层数的相似度rbd为0.64。立茬质量与立茬侧影覆盖度的相似度rce为0.48。不同秸秆信息间的相关性有着较大差异。
