丸粒化包衣种子识别检测系统设计与试验
2022-08-05侯占峰张曦文戴念祖马学杰
侯占峰 张曦文 陈 智 戴念祖 马学杰 刘 敏
(内蒙古农业大学机电工程学院,呼和浩特 010018)
0 引言
种子是实现高产的关键,种子包衣技术可以提高种子的质量,是种子走向商品化的关键环节,因此种子包衣技术一直备受关注[1-3]。
种子包衣是一种用外部药剂覆盖种子以提高其性能和植株建成的技术,利用特定的包衣工艺使种子表面和包衣剂均匀接触,包裹形成一层光滑、牢固的药膜。通过机械加工,制成大小均匀、形状规则的类球体(包括正圆形、椭圆形、扁圆形等)[4-6]。其中包衣剂包含多种成分,根据具体环境因素,适当调节剂量成分可提高种子耐旱、耐寒、耐盐碱、防治土传病害等能力。由于我国种子包衣技术起步较晚,包衣理论研究不足,国内自主设计生产的包衣机智能化程度低、控制系统较为简单[7-8]。实际包衣过程中,不同的包衣配方和包衣工艺对包衣成功率影响很大[9]。由于缺少包衣种子快速识别检测装置,长期以来主要依靠人工目测分选包衣合格的种子从而计算包衣合格率,依靠人眼识别效率低、错分率高、劳动强度高。开发设计丸粒化包衣种子识别检测系统,提高包衣种子的检测效率,是目前急需解决的问题。
目前机器视觉技术被广泛运用于种子的形态与质量检测中[10-13]。将机器视觉技术运用于包衣种子合格率检测的研究鲜有报道。本文利用机器视觉技术,设计一套丸粒化包衣种子识别检测系统,针对形状为类球体的包衣种子进行识别。包衣后选取大量包衣成品进行预试验,从而得到破损种子、多籽包衣种子与合格包衣种子的识别阈值。通过拍摄平台对图像进行拍摄并传输至识别控制系统进行处理与识别。识别系统分别对包衣种子总数、合格数、多籽数、破损数进行检测,最终计算生成包衣合格率,从而提高包衣种子的检测效率。
1 整机结构与工作原理
1.1 包衣机结构
种子丸粒化包衣机由种子供给系统、粉料供给系统、药液供给系统、包衣锅调整系统和上位机控制系统组成。总体结构图如图1所示。设计的种子丸粒化包衣机主要技术参数见表1。
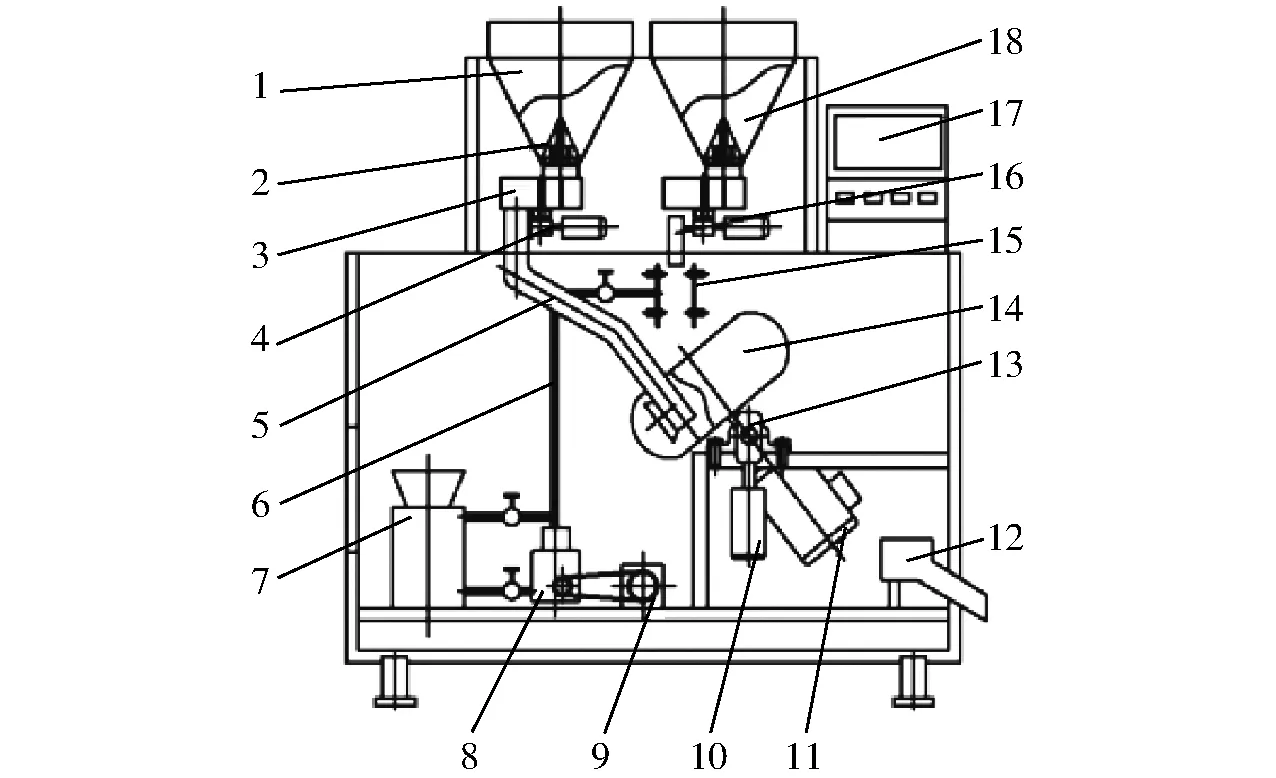
图1 包衣机总体结构图Fig.1 Overall structure diagram of coating machine1.供粉桶 2.气动阀门 3.称量系统 4.电磁阀 5.粉料输送管道 6.药液管道 7.药液桶 8.蠕动泵 9.继电器 10.减速步进电机 11.包衣锅电机 12.出料口 13.电动激振器 14.包衣锅 15.喷头 16.分流板 17.上位机控制系统 18.供种桶
1.2 包衣机工作原理
包衣时,种子和粉料分别喂入供种桶和供粉桶内,通过控制气动阀门的开关实现种粉定量供给。通过蠕动泵将药液抽送至喷头进行雾化。种子下落过程中,经过分流板分流,在下落过程中与雾化的药液进行接触,使种子表面接触药液,随后落入包衣锅内。供种结束后开始供粉,当粉料落入包衣锅内,包衣锅在包衣锅电机的带动下开始旋转,同时电动激振器通过调节变频器的频率来改变激振力的大小,将激振力施加在包衣锅的主轴上,进而形成振动力场。在振动力场作用下,使粉料更加均匀、牢固粘附在种子表面,进而有效提高种子的丸粒化包衣合格率、单籽率及单籽抗压强度。丸粒化包衣后,包衣锅在减速步进电机带动下旋转,将种子倒入出料口并排出,完成整个包衣过程。
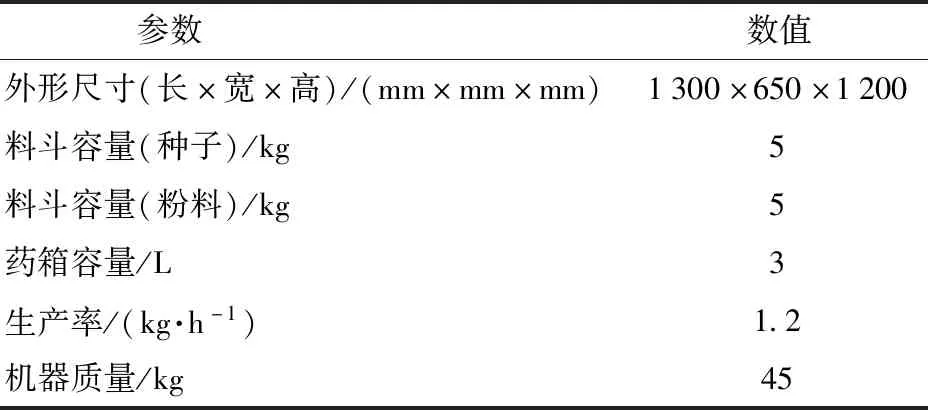
表1 种子丸粒化包衣机主要技术参数Tab.1 Main technical parameters of seed pelleting coating machine
2 识别检测系统设计
丸粒化包衣种子识别检测系统主要由拍摄平台以及识别控制系统组成。包衣种子初始放置于拍摄平台的底盘上进行图像采集,采集的图像通过数据线实时传输至识别控制系统进行识别检测并生成识别结果,最终通过计算得到包衣合格率。
2.1 拍摄平台设计
拍摄平台包括摄像头、底盘、光源灯、支架以及识别控制系统。拍摄分辨率为1 920像素×1 080像素,单幅图像拍摄采集时间约为1 s。拍摄平台结构图如图2所示。拍摄平台主要硬件参数见表2。
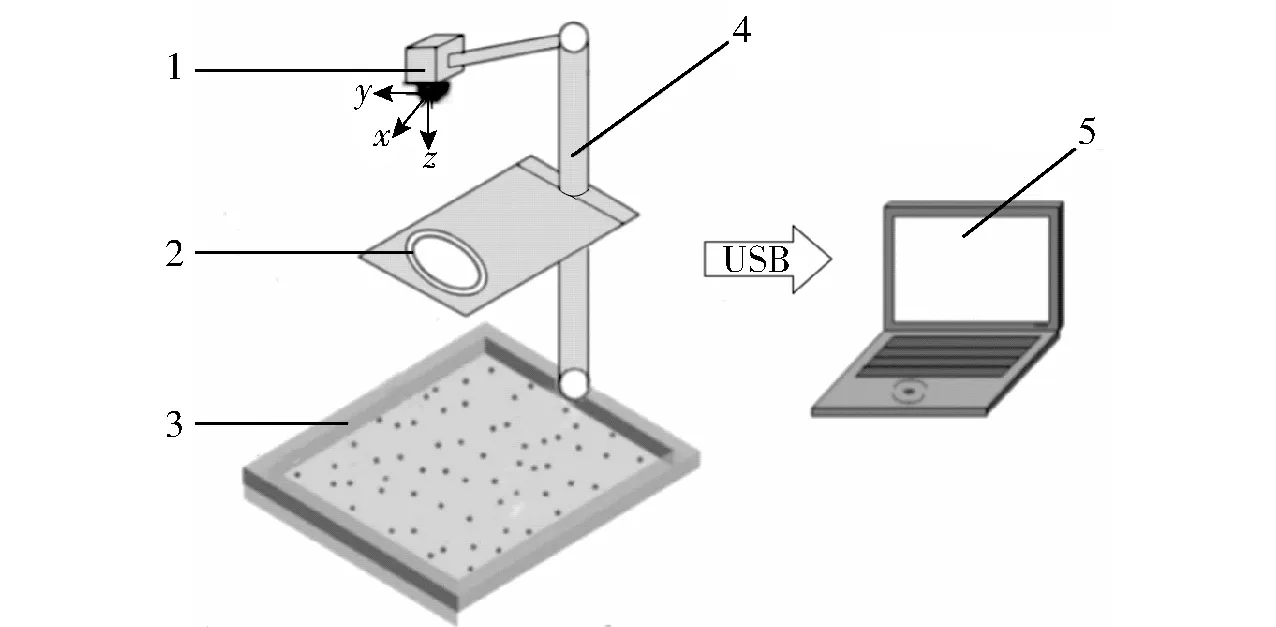
图2 拍摄平台结构图Fig.2 Structure diagram of shooting platform1.摄像头 2.光源灯 3.底盘 4.支架 5.识别控制系统
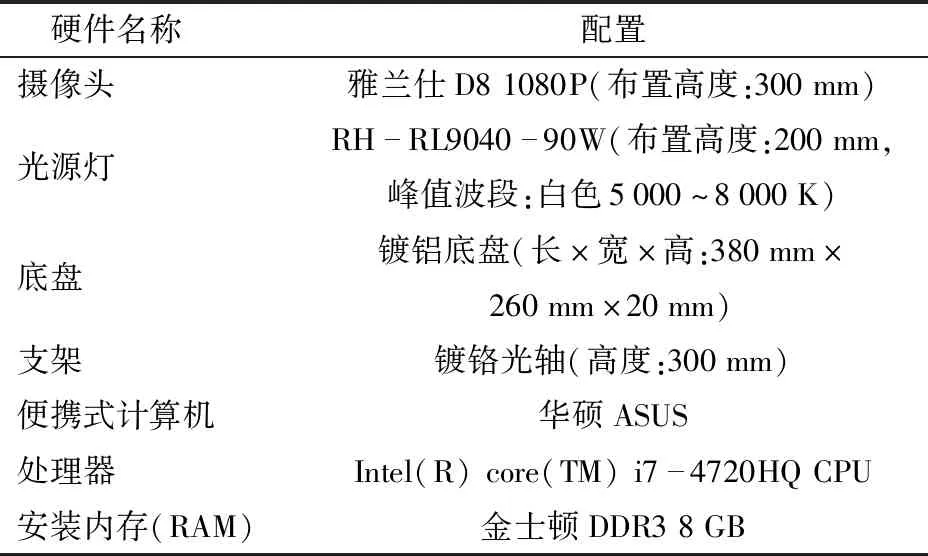
表2 拍摄平台主要硬件配置Tab.2 Main hardware configuration of shooting platform
2.2 识别控制系统设计
识别控制系统采用NI公司开发的虚拟仪器软件开发平台LabVIEW 2018进行设计。该软件采用图形化编程的方法,界面美观简洁,函数模块丰富,可以高效地设计各种控制程序,极大简化了开发时间。识别控制系统划分成3个模块:参数设定模块、图像识别显示模块和结果分析模块。各模块独立设计编写,实现了参数设置、图像识别、目标标记以及计算处理等功能[14-17]。识别控制系统界面如图3所示。
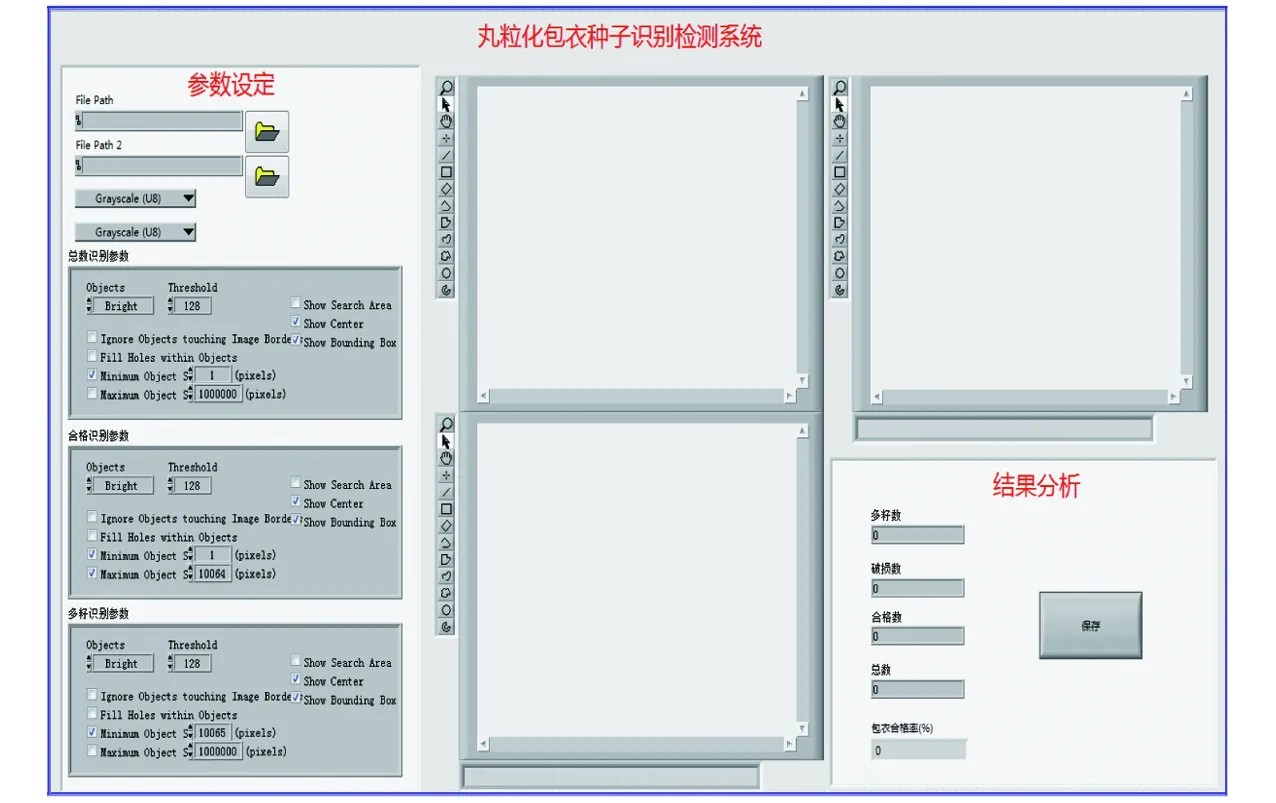
图3 识别控制系统界面Fig.3 Identification control system interface
在控制系统中设置参数,输入采集图像并进行前期处理,前期处理后对各类型包衣种子进行识别,识别结束后输出识别结果并计算包衣合格率。识别系统工作流程图如图4所示。

图4 识别系统工作流程图Fig.4 Working flow chart of identification system
3 图像获取及处理方法
3.1 图像获取
本次识别以豆科牧草红三叶种子为对象,选用粒径为200 μm的大豆粉与细度为100目的硅藻土进行5∶5比例混合作为丸化包衣粉料,种粉和种液质量比为1∶3,分5批次供给,相邻批次间隔时间3 min,包衣总时长30 min。生长过程中,包衣粉料遇水溶解,既不影响种子的生长,又能给种子生长创造营养条件。在振动力与旋转力共同作用下,包衣粉料与种子充分接触,最终均匀包裹在种子表面,形成大小均匀、形状规则的类球体。包衣后的种子分为3种类型:合格包衣种子、多籽包衣种子以及破损包衣种子。经多次预试验发现,合格的包衣红三叶种子形状为类球体,其球体直径稳定在3~5 mm之间(包括直径为3 mm与5 mm的包衣种子)。多籽的包衣红三叶种子形状为椭球体,其特点是椭圆面长轴超过5 mm,以包衣种子最大直径5 mm作为区别多籽包衣种子与合格包衣种子的阈值。经放大镜目测观察包衣种子,发现部分包衣种子存在表面膜衣覆盖不足,种子局部区域裸露在外的问题,将其定义为破损包衣种子。包衣红三叶种子样品如图5所示。
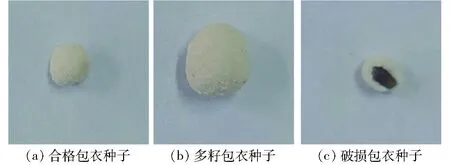
图5 包衣红三叶种子样品Fig.5 Samples of red clover coated seeds
包衣结束后,随机选择100粒包衣红三叶种子作为样品,随机摆放至拍摄平台底盘。由于包衣种子成品为乳白色,因此底盘背景选择鲜绿色来突出包衣种子的细节。图像处理样图如图6所示。
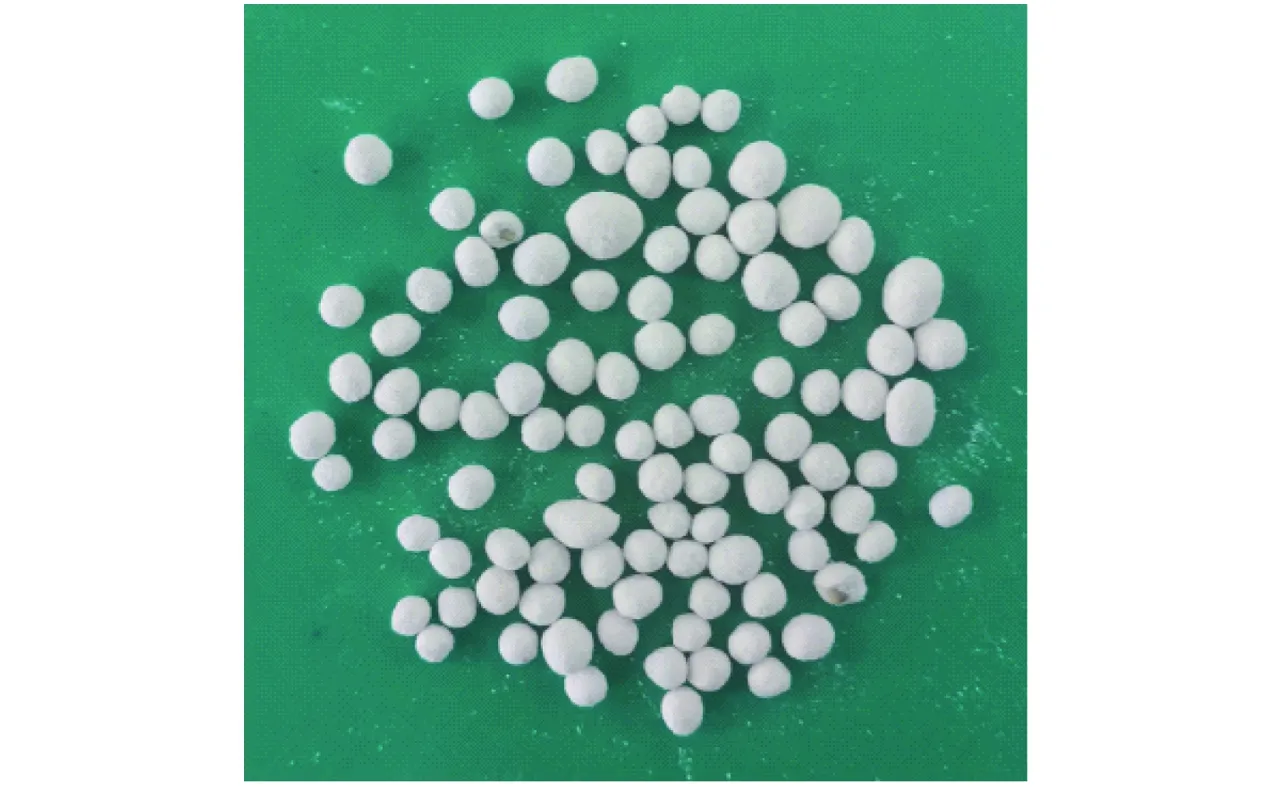
图6 图像处理样图Fig.6 Image processing sample
3.2 图像前期处理
图像处理软件选用NI公司开发的Vision Assistant 2018,其包含一套完整的图像处理函数功能库,功能丰富且强大,能高效快速地进行图像处理,同时,该软件可以将图像处理源程序集成到LabVIEW 2018开发环境中运行。相比于其他视觉产品,该软件极大地简化了处理流程,缩短了算法开发调试的时间。经测试发现,整套图像处理算法对单幅图像的处理时间约为1 s。
拍摄平台采集的包衣种子图像传输至识别控制系统中进行图像前期处理,通过图像前期处理可以消除包衣种子之间的接触面积,使每一粒包衣种子成为一个独立的个体,以便于后续进行包衣种子总数识别。图像前期处理流程图如图7所示。
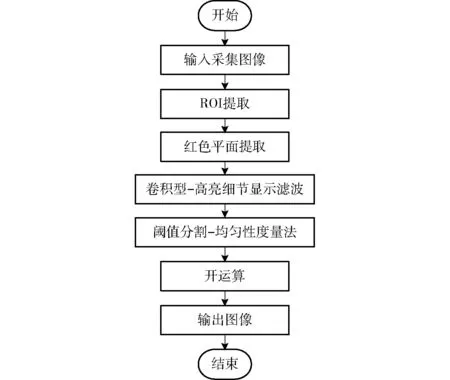
图7 图像前期处理流程图Fig.7 Flow chart of image pre-processing
图像前期处理效果直接影响后续包衣种子的识别误差。为了方便特征提取,提高识别的准确性,在提取特征之前,对采集的图像进行感兴趣区域(ROI)提取、颜色平面提取、滤波、阈值分割以及形态学分析,最终消除包衣种子之间的接触面积。
考虑到底盘背景为鲜绿色,为了更好地进行分割,突出种子轮廓,对原始图像进行颜色平面提取,经调试发现提取红色平面可有效去除背景干扰,突出种子轮廓[18]。灰度化处理效果如图8a所示。
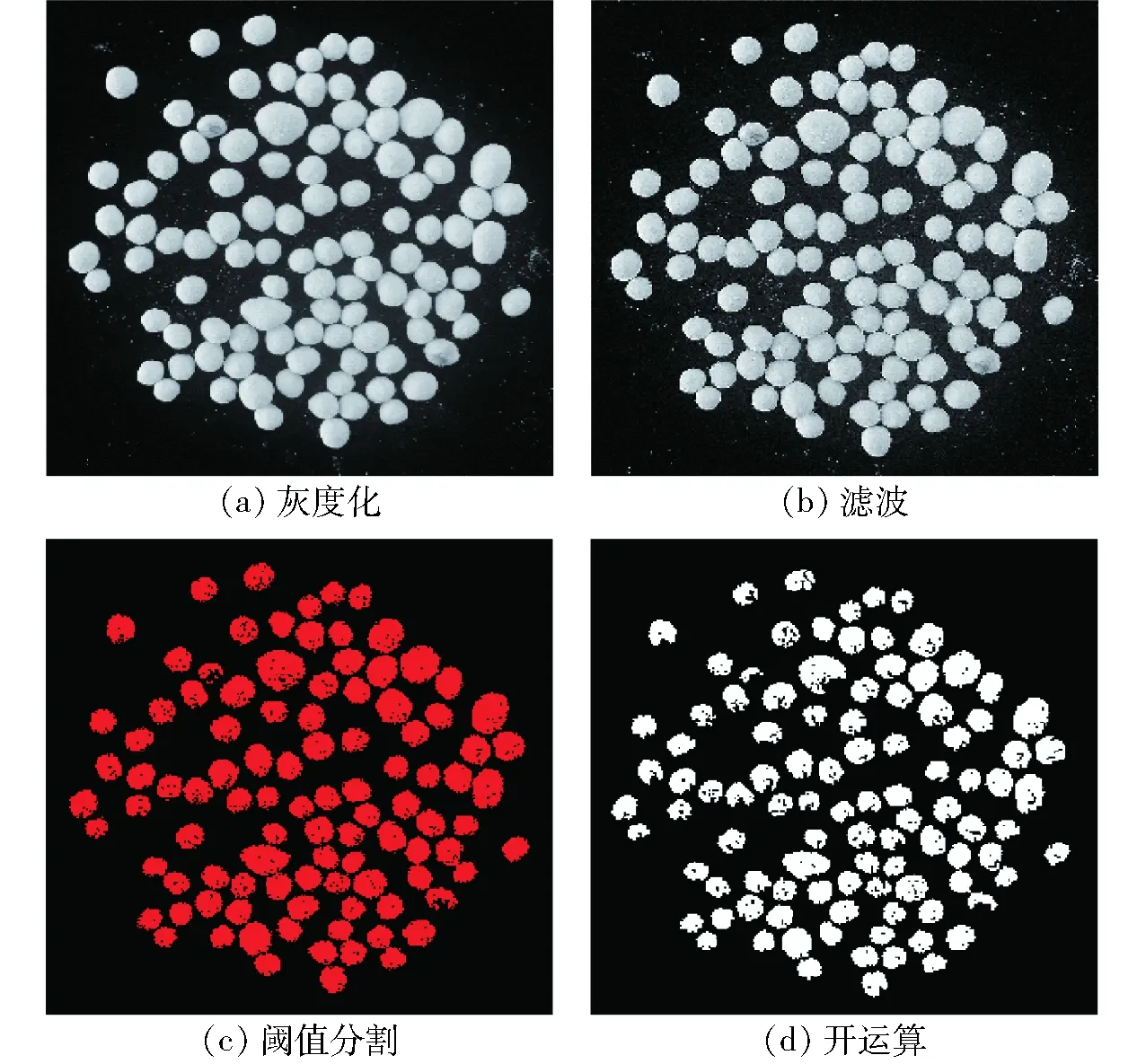
图8 种子图像处理结果Fig.8 Seed image processing results
图像滤波可以改善图像质量、增强识别效果、丰富细节信息量。经过观察,种子摆放密度不均,部分区域接触过于密集,3种类型种子随机摆放,增加了处理难度,为此选用卷积型-高亮细节显示。该方法属于常见的线性卷积核滤波,可以有效地突出种子的细节,增强目标轮廓、边缘等高频信息,使图像更锐化。根据线性卷积运算实现图像增强效果,卷积核沿着图像左上角逐行、逐列滑动,最后停于图像右下角最后一个像素点,不断根据邻域像素的值计算各个像素的新值来完成计算的过程[19]。卷积核选择 3×3方形阵列。卷积核为
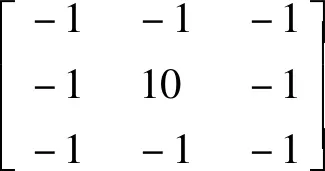
计算过程中,每滑动至一个新像素,都经过卷积运算得到新值,并对图像原像素值进行覆盖。经卷积运算后的模板中心位置对应的像素值P′5为

(1)
式中Pi——点i处的像素值
W——卷积核模板
本次图像处理算法运用两次卷积型-高亮细节显示,卷积核相同。滤波处理效果如图8b所示。
自动阈值分割方法基于图像的灰度直方图来确定灰度阈值,适用性强,本文选用均匀性度量法进行分割[20-22]。
均匀性度量法的原理是,假定初始阈值已经能把图像分割成“背景”和“目标”两部分,那么属于同一类别内的灰度分布应当具有均匀性。采用方差来对均匀性进行度量。设原图像上任一点(x,y)处的灰度为f(x,y),将待分割图像分为C1和C2(即背景和目标)两类,则算法步骤如下:

(2)
(3)
式中NC1、NC2——第1、2类中的像素数
分别计算两类在图像中的分布概率p1和p2。分布概率计算公式为
(4)
(5)
经阈值分割后的种子图像存在个体分割不佳、边缘处区域连接等问题。阈值处理效果如图8c所示。
膨胀和腐蚀并不是互逆的运算,因此具体使用过程中,两者可以级连结合。经阈值化处理后的二值图像先腐蚀再膨胀,进行开运算,以此来去除图像中不必要的信息,如噪声、相互重叠的区域、种子连接区域等。开运算可以对图像进行局部修饰,经形态学处理后的包衣种子消除了接触面积,分割成独立的颗粒,提高了后续算法的准确性。其中颗粒是指图像中一组非0或灰度很高的白色像素组成的区域。形态学处理效果如图8d所示。
本次设计的图像处理方法实现了包衣种子的边缘划分,使包衣种子分割成独立的由白色像素组成的颗粒。经过处理后的图像更适合进行基于颗粒的定量分析、提取模型建立和目标识别。
4 图像识别算法
经前期处理的图像通过识别函数对目标种子进行标记识别,识别得到单组包衣参数下3种类型包衣种子的数量并实时计算包衣合格率[23]。图像识别算法流程图如图9所示。
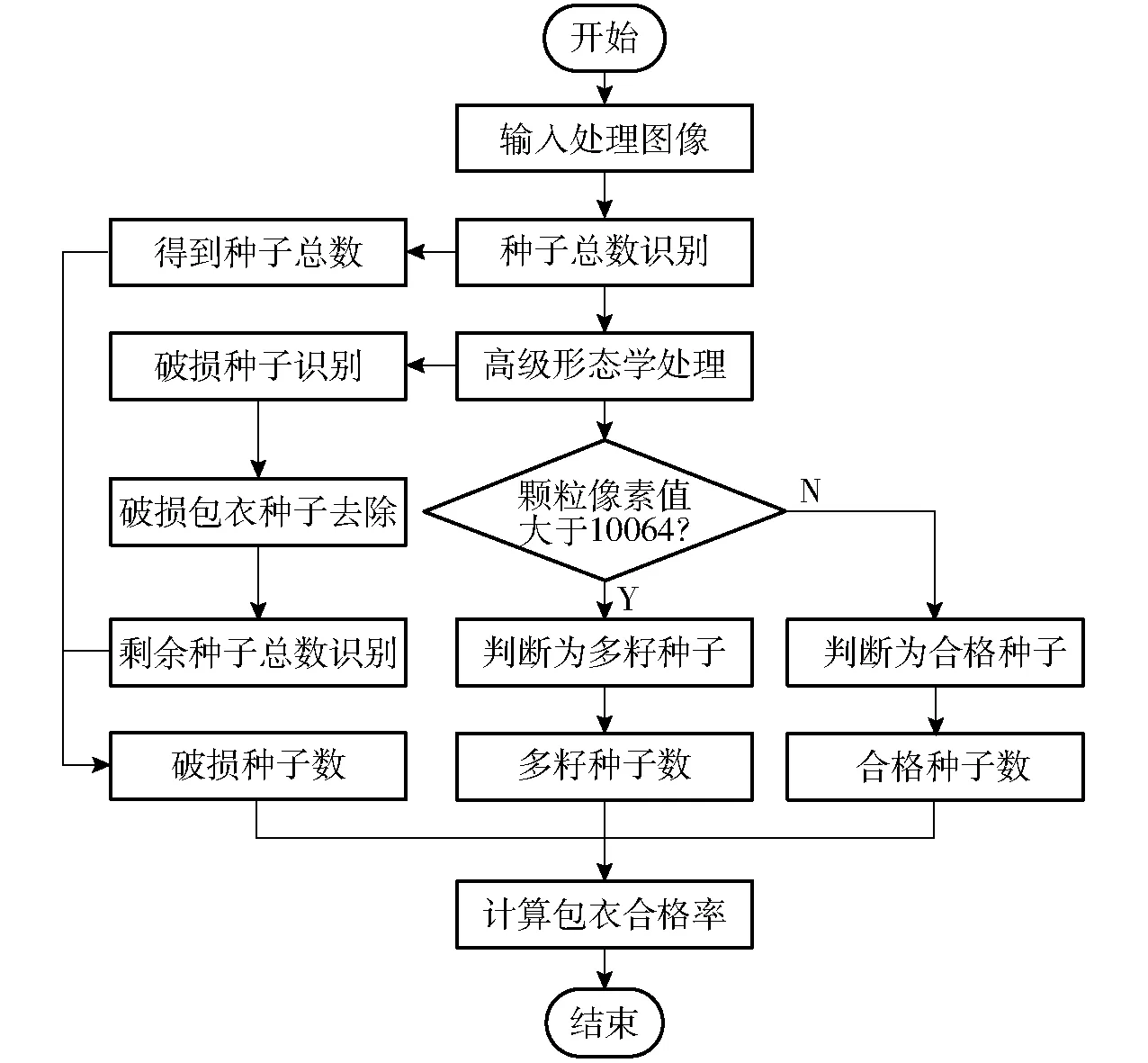
图9 图像识别算法流程图Fig.9 Flow chart of image recognition algorithm
4.1 总数识别算法
由于处理后的种子为一组由白色像素组成的颗粒,种子表面包裹的粉料面积直接影响白色像素总值。其中多籽包衣种子由于体积较大,处理后的白色像素总值远大于其他两种类型。根据组成颗粒的白色像素总值不同,运用视觉识别函数IMAQ Machine Vision中的IMAQ Count Objects子模块对目标颗粒进行识别。该模块能对图像中由白色像素组成的颗粒进行识别、框选以及计数,通过设置最小识别像素总值以及最大识别像素总值,生成一个识别范围,从而对图像中的目标颗粒进行识别框选并标记数量。当不设置识别阈值时,识别系统对图像中所有包含白色像素的颗粒进行识别框选。
经滤波和开运算处理后的图像消除了微小像素点的干扰。对种子总数进行识别时,调整最小识别像素总值为1,对图像中所有包含白色像素的目标进行框选识别。以样图为例,目标种子总数为100,识别过程从图像上方向下依次识别框选并编号,编号从0开始,到99结束,识别成功率达到100%。总数识别效果如图10所示。
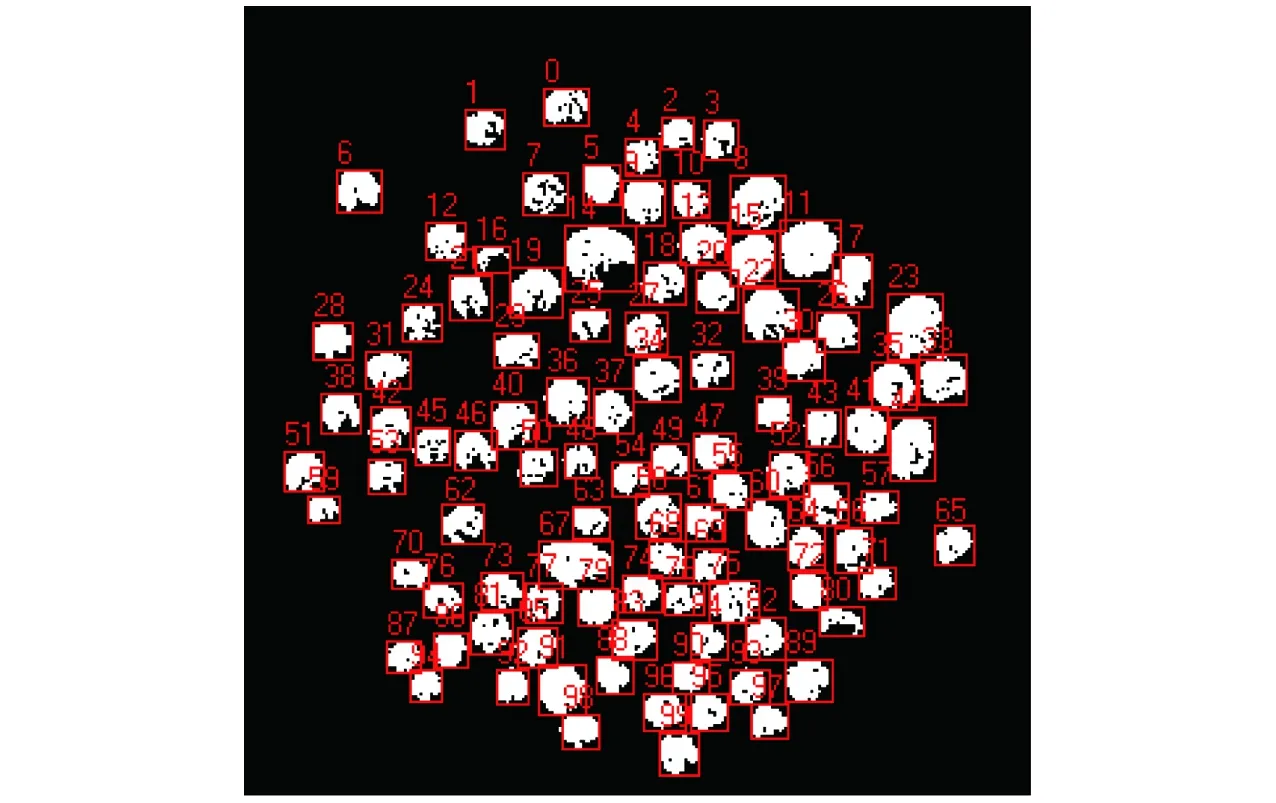
图10 总数识别效果图Fig.10 Total recognition effect picture
4.2 破损包衣种子识别算法
与基础组合形态学处理算法不同,高级的形态学处理算法通过执行有条件的基础形态学处理算法,专门用于二值图像中颗粒的处理。
由于破损包衣种子表面粉料较少,种子局部裸露在外,经前期处理后的白色像素面积远小于其他类型种子,且难以形成完整的圆形颗粒。综上,运用Vision Assistant 2018中Particle Analysis功能模块对图像中颗粒的面积进行分析和统计,该模块支持对图像中颗粒的坐标、像素总值以及面积进行分析。通过拍摄平台拍摄的图像宽度像素值与高度像素值固定,图像总面积为固定值,图像处理后的单个颗粒面积占图像总面积的百分比记为S。为了得到破损包衣种子颗粒的面积百分比阈值,选取多粒直径为3 mm、形状类似于球体的合格包衣种子进行单独处理,得到其颗粒平均面积百分比为0.034 22%。根据破损包衣种子颗粒的面积远小于合格包衣种子和多籽包衣种子颗粒,设定阈值S小于0.034 22%作为破损包衣种子颗粒的识别条件。
运用功能模块Advanced Morphology中的Remove small objects子模块,移除图像中的小面积颗粒,从而移除图像中破损包衣种子颗粒。通过调试发现,当函数迭代次数为13次时,可去除图像中S<0.033 89%的颗粒,迭代次数为14次时,将去除图像中S>0.034 22%的颗粒。综上,迭代次数为13时符合设计功能要求。样图中包含两粒破损包衣种子,高级形态学处理效果如图11所示。
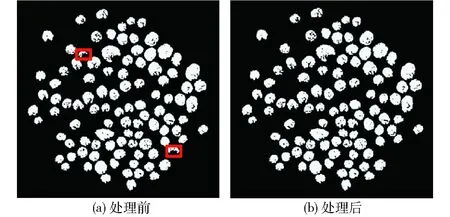
图11 高级形态学处理效果图Fig.11 Effect picture of advanced morphology processing
经高级形态学处理后的图像再次运用总数识别算法进行总数识别,识别后的结果与处理前的识别总数的差值为破损包衣种子数。
4.3 多籽种子与合格种子识别算法
在移除破损包衣种子颗粒的基础上对多籽以及合格的包衣种子进行识别检测。多籽包衣种子体积较大,经处理后白色像素值较高,为了更好区别,选取多颗直径为5 mm、形状规则类似于球体的合格包衣种子进行单独识别,测得其白色像素总值的平均值为10 064,作为判断多籽与合格包衣种子的阈值。
运用IMAQ Count Objects子模块对多籽颗粒进行识别,对阈值参数进行设置,调整最小识别像素总值为10 065,对多籽包衣种子进行框选识别并计数。样图中多籽包衣种子个数为8,识别系统检测结果与其一致,满足设计要求。多籽包衣种子识别效果如图12所示。
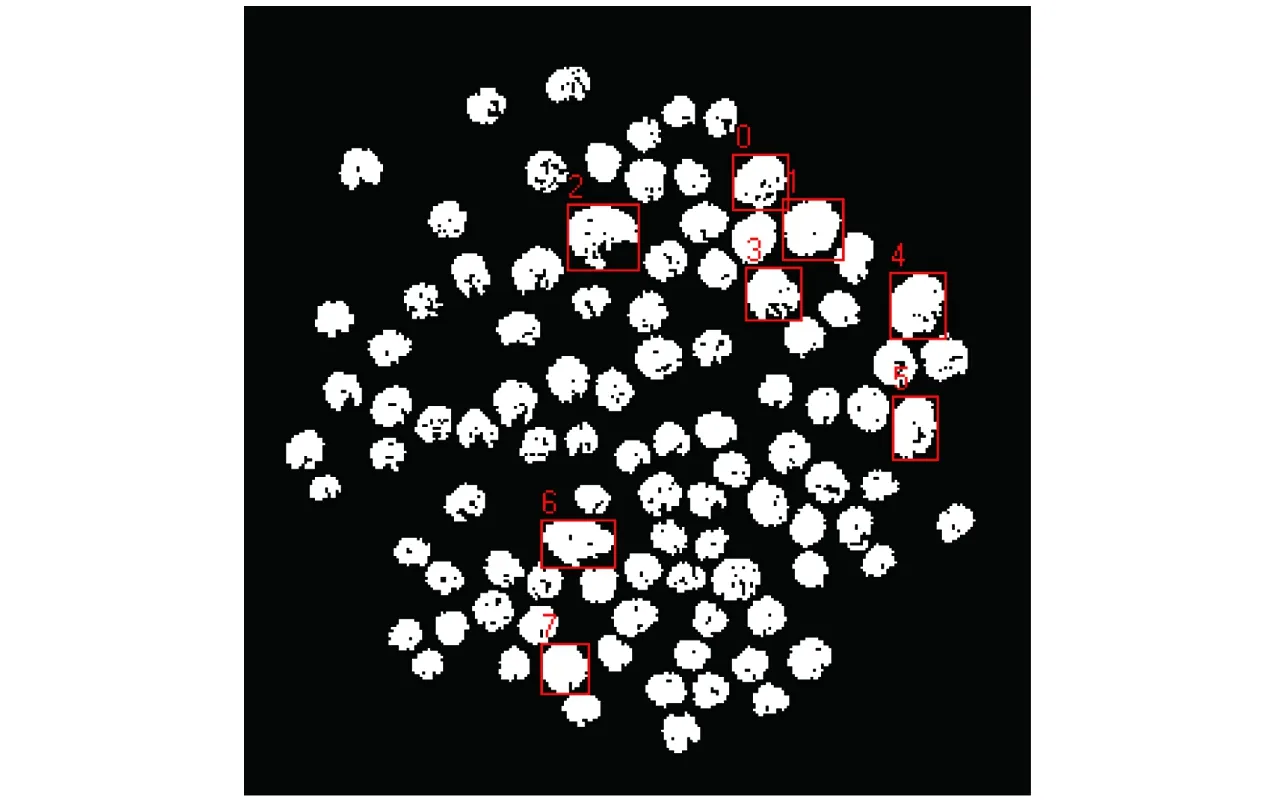
图12 多籽包衣种子识别效果图Fig.12 Recognition effect diagram of multiple coated seeds
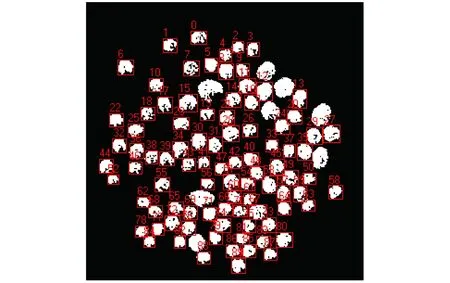
图13 合格包衣种子识别效果图Fig.13 Qualified coated seed identification effect picture
同理,设置合格包衣种子的阈值参数,调整最大识别像素总值为10 064,对合格包衣种子进行框选识别并计数。识别过程中,对图中白色像素总值小于等于10 064的目标进行框选计数,样图中合格包衣种子数量为90,识别结果与其一致,符合设计要求。合格包衣种子识别效果如图13所示。
识别过程中,3种识别过程同时进行,实时显示识别结果。包衣合格率等于合格包衣种子数除以识别总数。生成结果后保存至Excel中,方便对不同包衣参数下的包衣合格率进行对比分析[24]。经测试发现,识别系统对单幅图像的识别检测时间约为1 s。
5 试验与结果分析
为验证装置的稳定性与可靠性,选用实验室自主设计搭建的振动旋转式包衣机进行试验包衣,装置样机如图14所示。试验样品选用无包衣剂的红三叶种子进行丸化包衣,包衣结束后进行干燥处理,随机挑选包衣成品摆放至拍摄平台,进行图像拍摄,后续进行图像处理以及识别。试验对包衣种子识别算法的可靠性以及准确性进行测试。

图14 种子包衣装置样机Fig.14 Seed coating device prototype
5.1 破损包衣种子识别算法验证试验
为了验证破损包衣种子的识别误差,选取成品中的破损包衣种子进行试验。由于破损包衣种子基数较少,本次试验选择20到100粒破损种子,每组破损包衣种子不重复进行试验,通过拍摄平台进行拍摄。处理过程中,通过函数去除图像中S小于阈值的颗粒。破损包衣种子识别算法试验结果见表3。
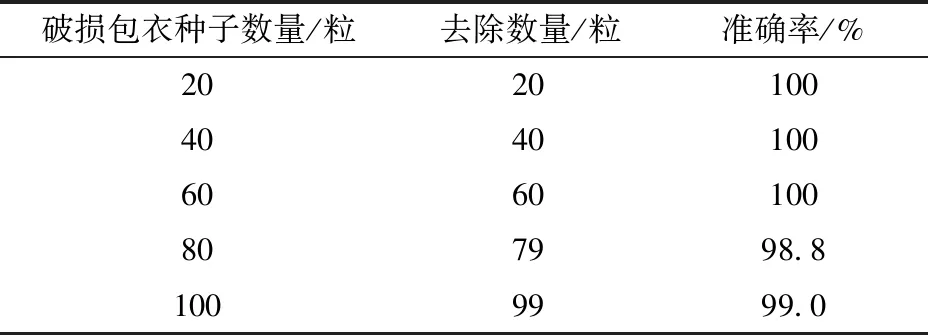
表3 破损包衣种子识别试验结果Tab.3 Experimental results of damaged coated seed recognition
根据表3可知,该识别算法准确率达98.8%,满足设计要求,对于破损包衣种子总数小于100粒的识别,误差稳定在1粒以内。根据试验证明,运用高级形态学处理识别破损包衣种子的方法准确率高、稳定性强,可有效减少破损包衣种子对后续识别的影响。
5.2 包衣种子识别算法验证试验
为了验证种子总数识别算法、多籽种子数以及合格种子数识别算法的准确性,随机选取大量包衣成品进行试验,考虑到拍摄平台的底盘最佳容量为500粒以内,选取试验样品数为100~500粒,每组进行10次试验。试验过程中随机选择包衣成品摆放至底盘,单次试验的种子摆放位置重新进行分布。通过传统人工目测法得到结果,与识别系统识别结果进行对比,得到总数识别算法的准确率以及检测合格包衣种子与多籽包衣种子的相对误差,最终通过每组数据计算得到对应的方差。检测结果见表4。

表4 包衣种子识别算法准确率及方差Tab.4 Accuracy and variance of coated seed recognition algorithm
通过表4可知,本次设计的识别检测系统随着试验种子数量增加,总数识别算法准确率逐渐降低,当样本总数为500粒时,准确率达到97.1%。由于拍摄过程中种子摆放存在重叠现象,导致图像处理算法存在较小误差。图像中存在部分种子接触面积分割不到位,导致识别过程中,两个或多个包衣种子被误识别成一个包衣种子,且因白色像素值较多导致识别结果为多籽包衣种子。同时由于多籽包衣种子的基数较少,导致多籽包衣种子识别误差较大。试验结果表明,随着测试种子总数的增加,检测包衣合格种子相对误差以及检测多籽包衣种子相对误差在逐渐增大。根据国家制定的农作物薄膜包衣种子技术条件,包衣合格率检验试验需要随机取试样3份,每份200粒包衣种子。当样本总数为200粒时,总数识别算法准确率为99.1%,检测合格包衣种子相对误差以及检测多籽包衣种子相对误差分别为1.18%与3.36%。试验证明,该方法极大地提高了工作效率,降低了工作强度,可有效替代传统人工目测法。
6 结论
(1)通过机器视觉技术,设计了一套丸粒化包衣种子识别检测系统。针对类球体的包衣种子,设计了图像处理算法,通过识别系统实现了对包衣种子总数、多籽数、合格数、破损数的识别以及包衣合格率的计算。
(2)经试验验证,该图像处理算法可有效消除种子之间接触面积,实现了将包衣种子分割成独立颗粒的功能。同时,在总数识别算法无误差的前提下,运用高级形态学处理识别破损包衣种子数的准确率高达98.8%,满足设计要求。
(3)根据国家制定的农作物薄膜包衣种子技术条件,选取每份试验样本为200粒包衣种子时,总数识别算法的准确率达到99.1%,对合格包衣种子以及多籽包衣种子识别相对误差分别为1.18%与3.36%,满足设计要求。
