正则化HSS预处理鞍点矩阵的多尺度算法
2022-03-01董朝丽汪钰斌
董朝丽,汪钰斌
(江西农业大学南昌商学院,江西 共青城 332020)
1 引言
在众多重要领域,例如计算流体力学、电磁场推算及对众多偏微分方程的有限差分与有限元离散中,均会生成大规模的线性方程组[1]。鞍点问题作为一种特殊的线性方程组,在线性弹力学、图像处理等科学研究中拥有极为广泛的应用[2]。
近年来,相关研究学者对种类繁多的鞍点求解问题进行了不同方面的研究,并给出很多行之有效的求解方法。曹阳等[3]提出正则化HSS预处理鞍点矩阵的特征值估计,分析复特征值及实特征值的上下边界,并以特征值均为实数作为充分条件,最终证明该方法测得的复特征值更精确。董贝贝等[4]提出求解鞍点问题的广义正定和反Hermitian分裂方法,利用矩阵的正定分裂构造鞍点矩阵的两种分裂格式,结合迭代收敛充要条件,利用分裂格式构造算法迭代。刘李楠等[5]提出基于超松弛预处理的精细积迭代反演算法,将方程组求解归结为初值问题的极限形式,利用超松弛法预处理正演所得鞍点矩阵,降低条件数以减少测量扰动对反演计算的影响。鞍点系统中系统矩阵对角块具有奇异性,在系数矩阵阶数较大的情况下,受到计算机CPU、内存与偏差等众多外界因素干扰,上述的某些鞍点求解方法就不能给予较为准确的收敛解。
为了完善鞍点问题的计算收敛速度,减少计算机CPU占用率,使计算结果更加精准,本文提出一种正则化HSS(Regularrized Hermitian and skew-Hermitian splitting,RHSS)预处理鞍点矩阵的多尺度算法。在鞍点求解时,加入正则化方法,令方程的收敛效率得到显著提高,同时对HSS方法进行预处理,得到全新的预处理子,且对其参变量采取择优选取,保证算法的可靠性。通过多尺度参变量数值仿真,结果证明本文算法的收敛性极强,具有较高的实用价值。
2 基于正则化选取最优参数
因为方程系数矩阵具备相当程度的复杂度,只使用单纯的迭代算法来求解式(1),其计算效率较低。而正则化技术则可以充分改进系数矩阵的特质,令方程的求解过程更加便利。
下文将求解式(1)的大规模稀疏线性代数方程组
Ax=b
(1)
式(1)中,A为非奇异矩阵,x,b为列向量。在使用正则化手段的过程中,挑选适当的正则化系数是重要的一步,如果选择的系数太大,即便能够显著改善矩阵条件数,也会使获得的结果与真实结果相差较多,准确度不高;若系数太小又会令条件数无法得到改善,方程收敛速率也很小。因此找到一个合适的正则化系数是加快方程收敛效率的重要保证。
Tikhonov方法是使用最为普遍且高效的正则化方法[6],其Gauss Markon模型可表示为

(2)

对式(2)采用信道估计算法可得到如下方程

(3)
若式(3)中的条件数较大,也就是在式(3)的方程为病态时,该方程求解结果准确性较低,因此获取的参数估值也相对不可信。按照Tikhonov正则化原则,可把式(2)的正则化估计标准描述为
(4)
式(4)中,K为一个对称的正则化矩阵。由此,可将式(2)方程的求解过程重新表达为

(5)
在K=I的情况下,I为单位阵,可通过式(5)得到

(6)
与式(3)相比较,式(6)左端系数阵增添了α、I,如果α≥0,则称其为正则化参变量。因为增添了这两项系数可以预防方程系数阵产生病态问题,所以可获得参变量的稳定解。可以看出,在均方误差的迹为最小的情况下,Tikhonov正则化方法可以准确得到较为正确的结果,提升了算法的可靠性。由此,可将式(1)方程利用Tikhonov正则化方法转变成求解最小平方解的问题,具体表达为
(7)
式(7)中,L为一个和系数矩阵奇数相等的矩阵,λ为正则化参变量,且此参变量是正数。一般情形下,假设L是单位矩阵I,则式(7)与(8)的求解方程为相等关系
(ATA+λ2I)xλ=ATb
(8)
式(8)中AT是系数矩阵A的转置,xλ是使用正则化处理后的值。在求解式(8)时,如果系数λ的值过大,那么就会导致系数矩阵ATA+λ2I和初始方程的系数矩阵ATA相差较多,最后得到的矢量值与真实矢量值有较大误差;相反,如果系数λ的值过小,正则化算子ATA+λ2I和初始方程ATA过于靠近,就无法具备加速收敛的效果。并且,在式(8)方程的真实操作下,ATA会致使运算数量成倍上升,条件数的数量也会增多,令方程的收敛过程变得更加困难,所以,应该按照原始方程系数矩阵的特征来适时调整正则化方程[7]。
根据ATA算子会引发条件数增多这一规律,在此次研究方法中使用ATA+λ2I算子并不是一个最好的选择。此时,可把式(8)转换成等价模式
(Α+λI)xλ=b
(9)
式(9)将式(8)方程内的λ2利用正实数λ替换。能否选择一个合适的正则化参变量λ是求得精确结果的重要依据。通过上述方程式可知,λ越大,就会越趋近主对角占优,条件数越小,方程组的求解越简单。
在式(9)方程中,A+λI算子和原始系数矩阵的算子的根本区别就是主对角元素,所以λ的选取和系数矩阵有着密切关联。若对额外的矩阵信息为已知状态,如特征值、条件数等,则较容易获取正则化参变量λ。
3 HSS预处理鞍点矩阵的多尺度算法
在明确如何使用正则化方法选取合适的系数后,下面对鞍点矩阵的HSS预处理进行进一步分析,以此将鞍点问题求解的性能实现最优。
HSS是一种对称/反对称分裂的单参数分裂迭代方法,并验证了在α>0时,HSS分裂迭代无条件收敛与线性方程组的唯一解。通常情况下,可将迭代法的模式表示为
x(k)=φk(x(k-1),…,x(k-l)),k=l,l+1
(10)
式(10)中,φk为迭代算子,x(k-1),…,x(k-l)为迭代初始值,此种迭代方法为l步迭代算法。在l=1的状态下,则被称之为单步迭代算法;在φk和k互不相关时,也就是φk=φ,则称之为定常迭代法,反之称为非定常迭代法。本文将HSS迭代方法作如下描述:
首先对系数矩阵A进行分裂
A=H+S
(11)

(12)
通常状况下,迭代方法的收敛速率和线性方程的系数矩阵特质有较大关联[8]。在系数矩阵无法满足相关条件时,迭代算法的收敛速率相对缓慢,此时采取预处理可以很好地解决这一问题。通过预处理后的线性方程,其系数矩阵特征被重新完善,可将处理较为困难的线性方程求解问题转变成求出其近似解问题[9]。接下来对HSS迭代方法的预处理子采取进一步研究。
在不更改预处理矩阵结构的基础上,为了提升鞍点问题的求解速度,本文将HSS预处理子的衍生模式表示为
(13)

待求解的线性系统自身是以块结构化所构成的,鉴于该结构的良好性能,提出一新的HSS预处理子(NHSS)
(14)
这样,就形成了全新的两步迭代方程组,可将其描述为

(15)
考虑到有如下预处理子的存在
Mα,β=(Σ+Σ1)-1(Σ1+H)(Σ+S)
(16)
假设μ在Σ中块结构处起到了正则化作用,利用相关运算可得到式(17),β可以选择任意值

(17)
相应地转变参变量范围也能重新组合成另一种预处理子,将其表达为

(18)
因为其中一个选择参变量和原始矩阵内固定的参变量是相同的,因此能够很直接地看出两种预处理子的差别,两种预处理子内的Σ与Σ1为相等关系。
本文想要构建一种多参数化的预处理子,此种预处理子可以不受到原始矩阵内参变量的影响,防止参变量方位调整所造成的差异化问题。所以要让Σ满足以下条件

(19)
式(19)中,四个参变量均和原始矩阵A内的参变量无关且各不相同,不是一般性,可构建出如下预处理子
M=(Σ+Σ1)-1(Σ+H)(Σ1+S)

(20)
从式(20)中,可以得到
N=M-A
=(Σ+Σ1)-1(Σ-H)(Σ1-S)
(21)
式(20)中,N为M关于A的剩余矩阵。为了更加具体地分析预处理后的鞍点矩阵的特征值分布状态,需要择优选取预处理子内的参变量,以此保证算法的收敛速率。
将式(20)中的M作为例子,可以看出能够将A分解成
A=M-N
(22)
N=(Σ+Σ1)-1(Σ-H)(Σ1-S)
(23)
同时在式(22)中还隐含M-1A=I-M-1N,由此可以得到
λ(M-1A)=1-λ(M-1N)
(24)


(25)
(26)
根据式(26)可以看出β对N的F-范及预处理子M的预处理效果不会产生任何影响。由此可得出以下结论:
正则化参变量μ对运算过程具有十分重要的作用,若Σ—H的块取值是0,则Σ1—S的块对N的F-范不会发生影响,即块内全部的参变量可以选择任意数值;
利用最小化N的迹找出最优参变量,且该参变量可将Σ—H中的块取值为0;
按照式(25)和(26)中A的有效多参数,HSS预处理子可简化为
M=(Σ+Σ1)-1(Σ1+H)(Σ+S)
(27)
通过上述过程,可以加速鞍点矩阵的收敛速度,使线性方程的求解更准确,保证了算法的有效性与适用性。
4 仿真研究
为了验证研究方法的可靠性,进行了仿真。仿真环境采用MATLAB R2012a版软件,文献[10]实验中所使用IFISS软件包生成此次实验所用的线性系统。所用计算机的处理器为Inte1(R) Core(TM)2 Duo CPU T5450@1.66GHZ,Pentium双核2.8 GHz,运行内存为2GB,选用64位Windows 7系统。将研究方法与文献[3]方法(正则化HSS预处理鞍点矩阵的特征值估计)和文献[4]方法(求解鞍点问题的广义正定和反Hermitian分裂方法)进行多尺度参变量数值比较。
若原始矢量均为零矢量,右端矢量是c=He,其中e=ones(m+n,1),迭代数量为IT,则相对残差可描述为

(28)
式(28)中,(x(k)T,y(k)T)T为鞍点矩阵的第k次迭代近似解,在残差符合RES<10-6的条件时,则算法结束。
考虑如下鞍点问题,其系数矩阵依次为
(29)
在此例中,将给定常量v的值设置为0.1和0.01,,针对不同的v,取相应的p=15,20,25,同时α、β∈[0.0001,1],数值实验结果如表1、表2所示。
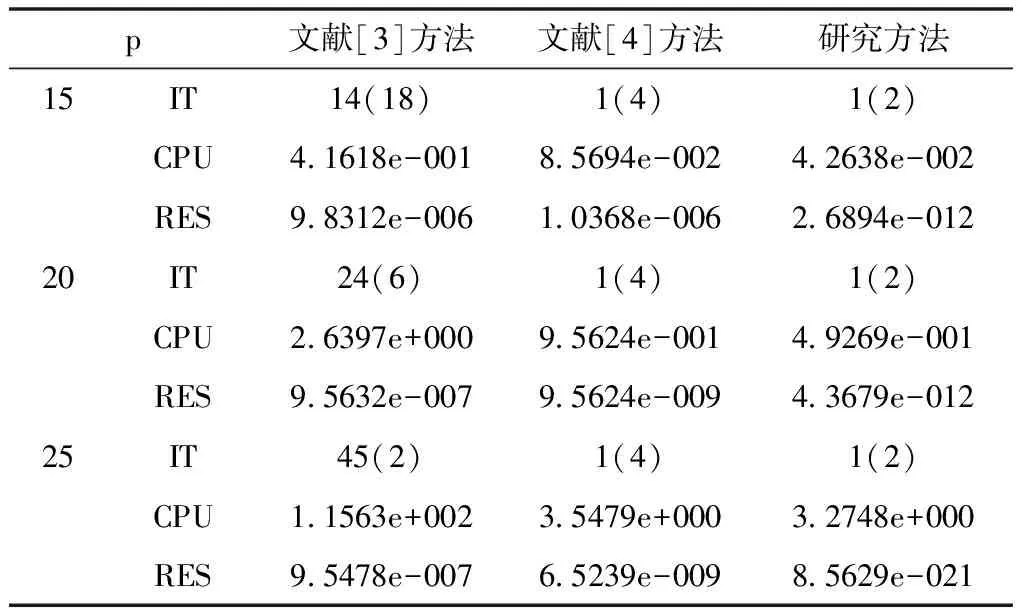
表1 v=0.1的数值实验结果
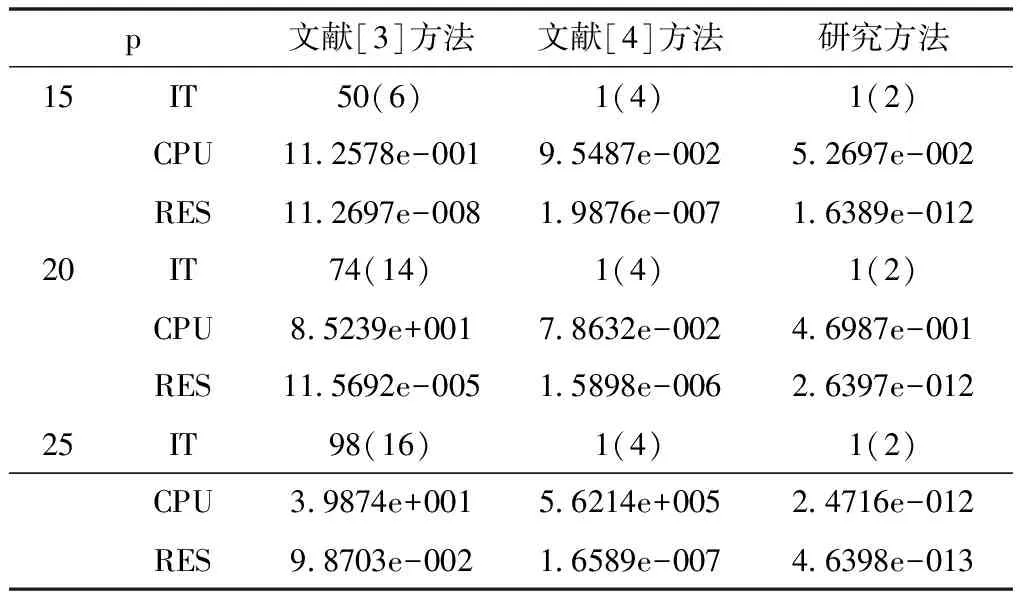
表2 v=0.01的数值实验结果
从表1和表2中可知,在α与β的取值不同时,不管是迭代次数还是CPU,研究方法的数据实验结果均比其它两种方法要好,证明研究方法的可靠性较高,CPU占用率较低。因为对线性方程进行了预处理,重新完善了系数矩阵特征,所以在鞍点矩阵求解有较好的收敛性,使数值结果的准确性较高。
5 结论
为了加强线性方程中鞍点问题求解的收敛性,提高求解的准确性,本文提出一种正则化HSS预处理鞍点矩阵多尺度算法。该方法可以显著提高求解过程的收敛性,且CPU占用率较低,拥有较好的适用性,可为大型线性方程求解提供新的思路。
