激光干涉测量系统非结构性误差的分析与补偿
2022-02-17付纯鹤连军莉
付纯鹤,连军莉,崔 莉
(中国电子科技集团公司第四十五研究所,北京 100176)
随着微电子机械系统(Micro Electro Mechanical systems,MEMS)技术的发展,精密运动工作台的应用范围越来越广,定位精度要求也越来越高。多自由度精密运动台测量系统作为集成电路制造设备、精密测量仪器、精密加工机床等大型装备的关键部件,不仅要求测量精度高,而且应具备量程大和测速高的能力。
激光干涉仪具有测量精度高、分辨率高和测量范围大等优点,在精密和超精密测量领域获得了广泛应用,用来进行高精度位移测量。由于激光干涉仪测量的分辨率相当高,达到纳米量级,测量过程中容易受环境及其他因素的影响。测量误差主要是激光干涉仪自身固有的结构性误差和非结构性误差,结构性误差主要为干涉仪光束不平行、安装及运动过程中引起的阿贝与余弦误差等;非结构性误差为系统误差、环境误差、测量系统自身的电路延时、测量数据滞后导致的延时误差等。要确保测量精度足够高,就必须分析误差来源,有针对性地进行补偿。
本文介绍了双频激光干涉测量系统以及激光干涉测量原理,并在此基础上,对激光干涉测量的非结构性误差进行分析,包括激光波长、镜面面形、数据延迟、反射镜安装非正交等误差,并提供了相应的补偿方法。
1 激光干涉仪测量原理
双频激光干涉仪利用多普勒频移效应进行位移测量,将反射镜与被测对象固联在一起,通过测量反射镜相对于参考反射镜的位移来测量被测长度。它以激光波长为长度基准,能够达到纳米级分辨率,而且通过多个干涉仪的组合,还能够同时测量角位移量。同时克服了零漂问题,具有很高的可靠性和抗干扰能力。
激光器输出2种频率f1、f2的双频激光,经准直后经1/4波片变为垂直和水平的两个线偏振光,一部分被分光镜反射作为参考光进入检偏器I拍频,以取得频差为f2-f1的参考信号,用作测量基准,另一部分作为测量光束进入干涉仪,双频激光干涉仪的工作原理如图1所示[1,2]。
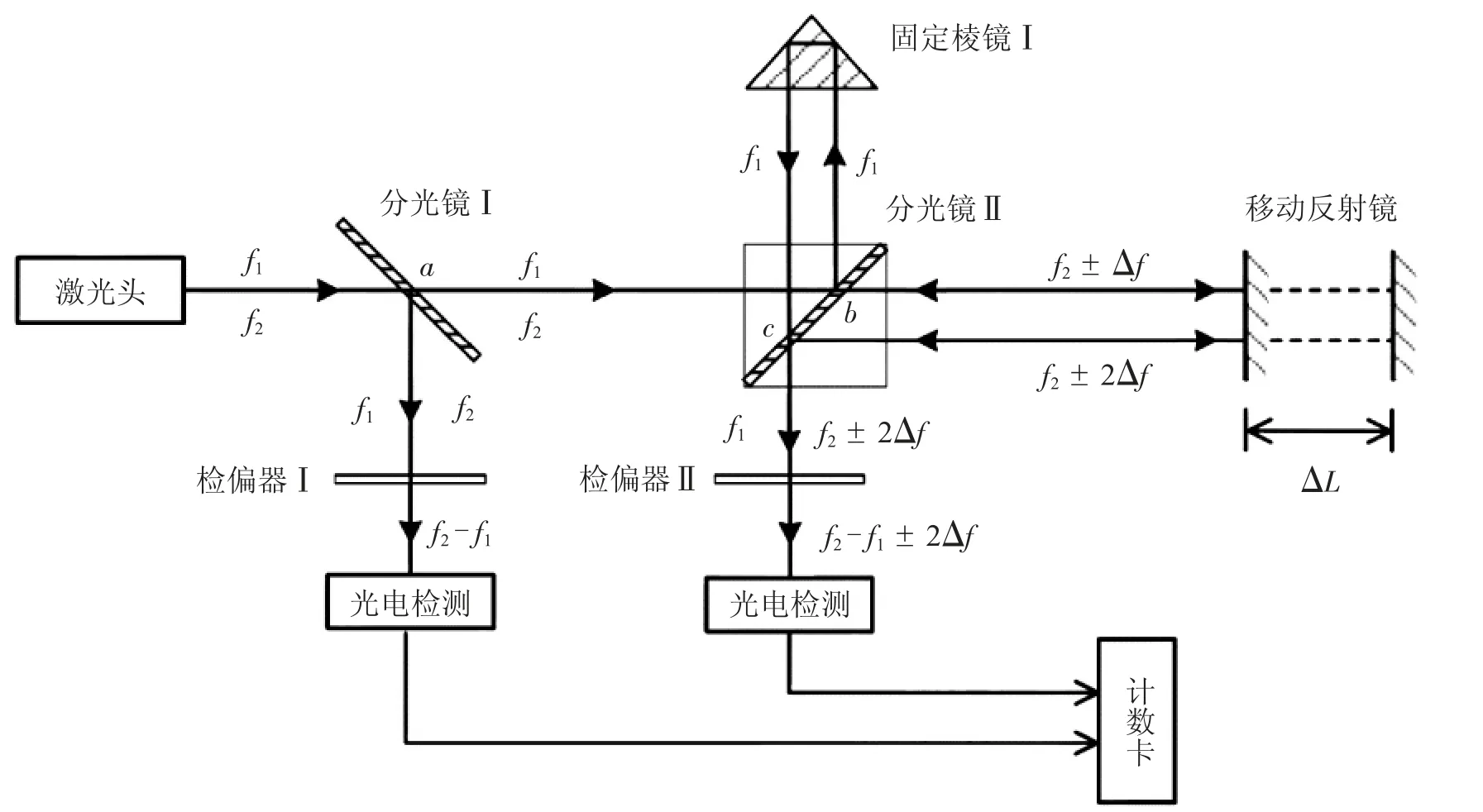
图1 双频激光干涉仪测量原理
1.1 线位移测量原理
参考光和测量光经过光电转换单元和激光干涉仪计数卡的处理,即可以计算出由运动台的速度v引起的△f,按照激光干涉仪原理公式可以求出运动速度v和位移△L。
激光干涉仪的基本公式为:
f2的频率变化△f,该变化量包含了被测对象的运动信息,表示为:

其中,c为光速,v为测量反射镜移动速度,f2为光频。
激光的频率f、波长λ和速度c之间的关系为:△f对时间积分可得到反射镜移动的距离△L:
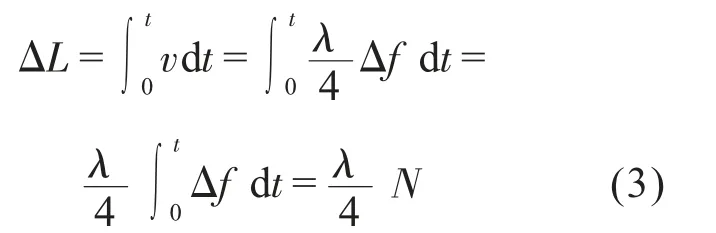

其中,λ为激光波长,N为与△f相关的计数值。
1.2 角位移测量原理
两个干涉仪组合,可以用来测量物体的角位移,其原理如图2所示。
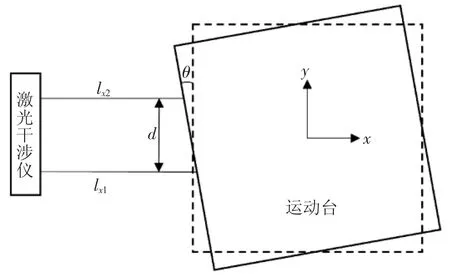
图2 激光干涉仪测量角位移示意图(俯视图)
x1与x2是相互平行且独立的测量轴,其之间的距离为d,当运动台偏转一个角度θ时,由x1、x2测量轴测得的线位移量分别为lx1与lx2,那么θ可由下式计算出:

2 非结构误差分析与补偿
激光干涉仪测量精度高,在实际测量条件下,有诸多因素会对测量系统产生干扰,从而引起测量误差。结合具体项目,本文主要阐述了4个方面的非结构性误差:环境引起的激光波长变化,镜面面形,数据延迟,反射镜非正交。本节将对这些误差产生的原因进行分析,并给出相应的误差补偿方法。
2.1 激光波长误差
激光干涉仪的测量基准是激光波长,激光波长会随着空气折射率的变化而变化,空气折射率会随着周围环境中空气的温度和气压的变化而变化。在实际应用中,空气气压、温度有缓慢的变化,会对空气折射率产生直接影响,从而引起激光波长的变化而影响测量精度。
激光波长的计算公式为:

式(5)中,λwv为激光干涉仪光源在真空中的波长;λv为λwv经过电子细分后的等效波长;
式(6)中,n为测量系统所处环境的空气折射率,λ为测量系统所处环境的实际波长。
式(7)中,P为大气压强;T为温度;
在运动台工作环境中,空气参数的变化比较缓慢,所以对气温和气压的采样可以在较低的频率下进行,当气温和气压发生变化时,需要重新计算λv,这样就能对环境变化所产生的误差进行补偿。
2.2 镜面面形误差
由于加工工艺的制约,反射镜面无法做到完全的平滑,精度大概为20~30 nm,其表面会有一定程度的形貌起伏,如图3所示。

图3 反射镜面形示意图
镜面面形会带来干涉仪光程的变化,从而引起测量误差。运动台在做Y向移动时,X向干涉仪的反射镜面形会导致X向干涉仪的光程误差△l,同时产生一个旋转角度θRz。在纳米级测量场景中,必须对反射镜面形误差进行补偿。加工完成后,反射镜的面形已经固定。而且在实际应用中,测量光束近似处于反射镜面上同一高度。镜面面形误差并不会引起全局模型的结构性变化,只是在最终结果上对每个自由度产生一个额外的误差,所以,对这种误差的补偿也是比较简单的,补偿量即相关形貌函数的线性叠加。
文献[3]中结合实际应用背景,提出一种新的反射镜不平度测量方法,以反射镜平移补偿量与旋转补偿量为测量目标,采用多序列的方法对运动台位置和旋转量进行测量,通过样条插值与最小二乘原理平滑连接所有测量序列,并计算出精确的反射镜不平度。
通过上述测量方法,会得到一组镜面面形函数,以数组形式存储,用于误差补偿。通过线性插值的方法,对反射镜面形误差进行补偿,具体补偿如下:
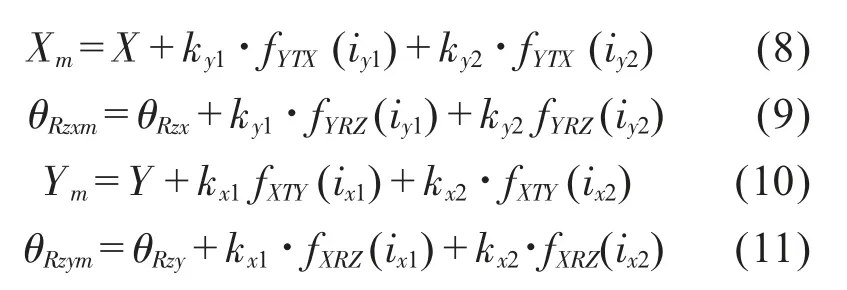
其中:
X,Y,θRzx,θRzy:表示当前测量的运动台位置;
Xm,Ym,θRzxm,θRzym:表示面形补偿后的运动台位置;
fYTX,fYRZ,fXTY,fXRZ:表示面形函数;
ix1,ix2,iy1,iy2:表示X和Y面形函数的索引;
kx1,kx2,ky1,ky2:表示相应索引的权重。
2.3 数据延迟误差
高精度运动台具有很高的扫描速度,同时要求测量精度达到纳米级。测量系统中的光路与电路延时会造成数据滞后,引起测量位置误差。低速运行或者测量精度要求不高时,数据延迟在低速运动时产生的误差可以忽略不计。但运动台全速运行时,数据滞后会严重影响到测量精度。所以必须对其进行补偿,从而满足测量系统的超高精度要求。
数据延迟包括测量信号延时、信号处理延时、数据输出延时等。在硬件设备布局中数据延迟是固定的,引入的误差与运动台速度成正比。这种误差属于测量结构外的误差,只需在最终测量结果上进行修正。扫描方向的补偿量为:

式(12)中的d0和dv分别是延时补偿前的位置和补偿后的运动台位置,v是运动台的扫描速度,tdelay是与数据延迟相关的机械参数,需要在校准过程中确定。
2.4 反射镜非正交误差
在激光干涉测量系统中,反射镜安装在运动台的侧面。反射镜的非正交夹角θ导致了干涉仪测量系统的非正交性。在测量或加工过程中,非正交会导致的位移误差。
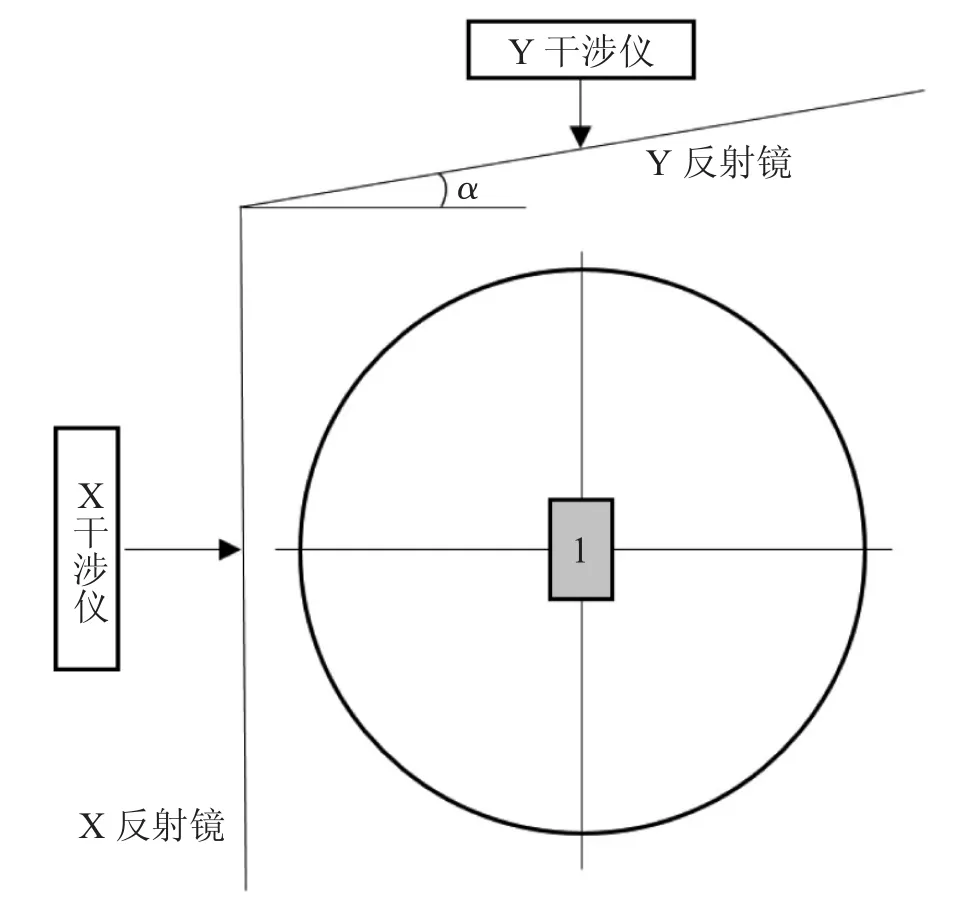
图4 加工位置1
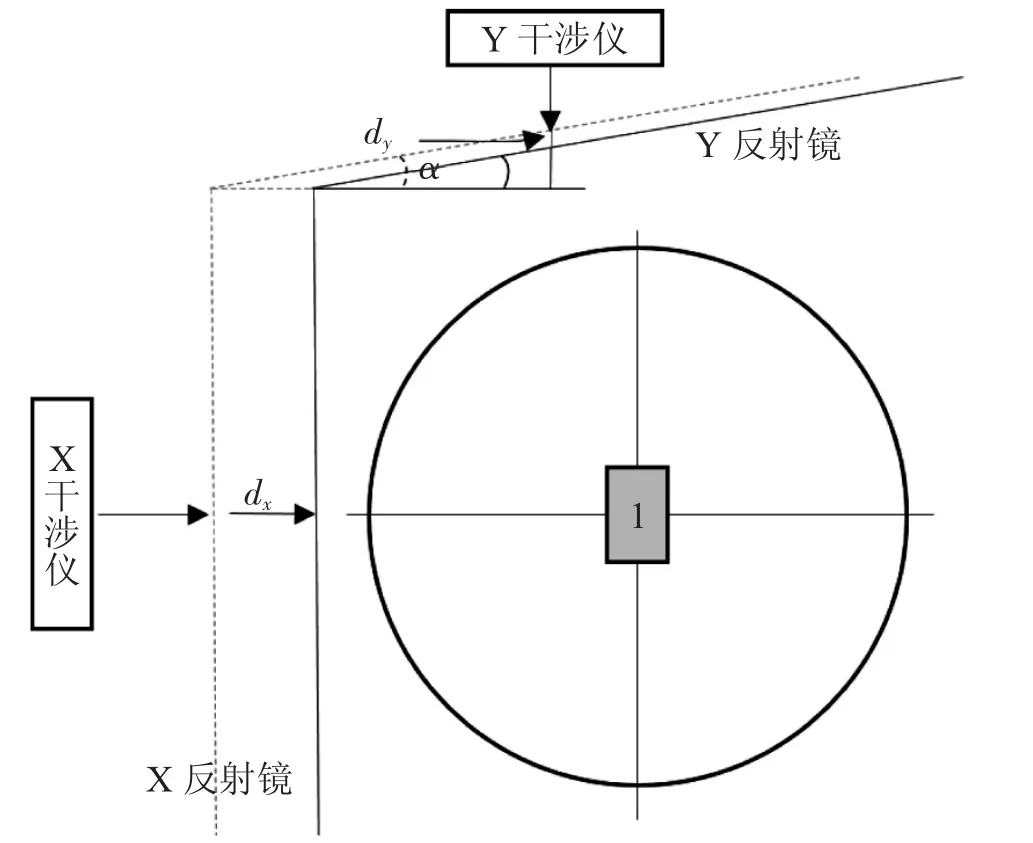
图5 沿X轴移动dx后
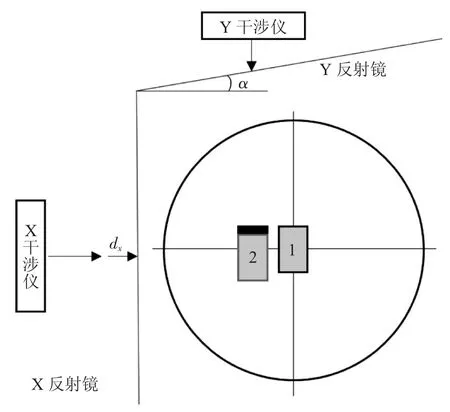
图6 加工位置2
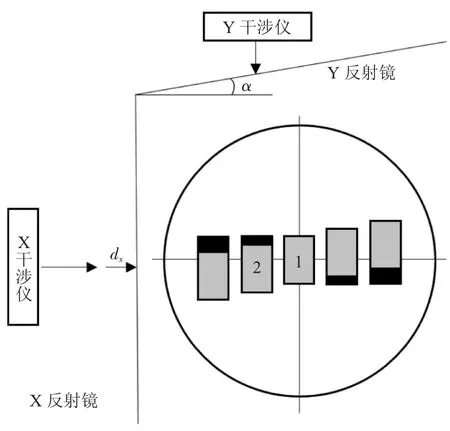
图7 加工的总体情况
图4 中,当运动台位于加工位置1时,加工位置为(px,py);图5中,当运动台沿X向移动dx时,因为反射镜非正交的存在,导致Y向位置发生了变化dy。为了保证在(px+dx,py)位置进行准确加工,运动台会在Y向向上移动一段距离dx·tgα,使得运动台当前的测量位置为py,然后进行加工,最终位置2的图形加工位置会产生偏移,如图6所示。图7是加工一行图形的效果图,可以看出,所有的图形位置发生了偏移。
为了消除误差,文献[4]结合实际应用背景,提出一种测量激光干涉仪测量系统非正交性的新方法。该方法使用了晶圆曝光,精确测量干涉仪测量系统的非正交因子和坐标轴尺度偏差,考虑到曝光过程对干涉仪测量系统的影响,因而检测结果更加准确。
长条镜安装之后,在一段时间内非正交误差也就固定,并且只产生在某一个方向,只需在最终测量结果上进行修正。通常情况下,θRzx伺服控制运动台,则此种情况下非正交的补偿量为:

式(13)中的dy是由非正交引起的Y向位置补偿量,dx是X向的位移量,sxy是非正交因子。
3 结束语
本文介绍了双频激光干涉仪的测量原理,深入分析了4种干涉仪非结构性误差,提出了相应的补偿方法。其中,镜面形误差、环境误差、反射镜非正交误差等误差补偿算法及其软件仿真均在实际研发过程中已得以应用,并在运动台系统中进行实际验证,效果良好,有效地消除了非结构性误差对整个测量系统的影响。
激光干涉测量系统在工作前,需要对误差参数进行预先标定。其次,根据装配条件和工作状况,误差参数可能会发生变化,需要定期进行重新标定,确保了测量系统的精度。
