水下拖曳系统定深和展开性能湖上试验研究
2022-02-16李超艾艳辉佘湖清江兴隆宋雯婧王盟
李超, 艾艳辉, 佘湖清, 江兴隆, 宋雯婧, 王盟
(中船重工第七一〇研究所,湖北 宜昌 443000)
拖曳系统作为一种海洋目标探测手段具有重要的军事和科研价值,其性能的优劣会直接影响设备探测效果,如何设计和精确预报拖曳系统性能也是各国学者研究的重点。目前,研究方法主要有数值方法和试验方法,数值方法侧重方法的完善[1-3]、缆姿态的模拟[4-7]及拖曳系统水动力性能的研究[8-9];试验方法注重拖缆阻力及振荡特性的测量[10-11]。试验方法中的湖、海试验是反应拖曳系统性能优劣的最直接方法,Rrispin[12]开展了拖缆海上试验,该数据也常用于数值方法可靠性验证;叶凡滔[13]通过湖试测量了不同航速下拖船直航和回转状态水下拖曳线列阵阻力;王岩峰[14]设计了用于500 m定深的拖曳系统并开展湖上和海上试验。湖、海试验准备周期长、费用昂贵、过程繁琐,目前关于拖曳系统的湖、海试验尚未形成较为成熟的试验准则。本文提出一种兼具定深和展开功能的探测拖体,在介绍湖试内容、测试设备和流程的基础上开展拖曳试验,研究拖曳系统定深和展开性能,掌握各因素影响规律,提出拟合函数。
1 试验模型及内容
1.1 系统组成及试验设备
水下拖曳系统由拖体、标志浮体和拖缆组成。拖缆为聚酯纤维缆,直径12 mm,密度1.2 g/mm,法向阻力系数1.9。拖体(图1)由4个浮筒、一对上下对称的水平翼板、一对左右对称的垂直翼板和位于翼板后方的4块舵板组成,水平翼板和垂直翼板分别产生主要定深力和展开力,使拖体保持在目标定深和展宽;舵板用于调整拖体初始姿态。标志浮体(图2)主要用于显示水下拖体的大致位置。以上装置主要参数见表1,拖曳系统示意图见图3。

图2 标志浮体

表1 主要参数
图3 拖曳系统示意
拉力计安装在船艉绞车上(图4),用于测量拖缆受力,压力传感器、水声应答器、倾角传感器(图5)安装于拖体内部,分别用于测量拖体定深、展宽、横滚角和俯仰角。

图4 拉力计安装
图5 测量仪器
1.2 试验内容
水下拖曳系统湖试目的是初步掌握拖体水动力性能,研究航速、翼板攻角、缆长对拖体姿态、拖缆张力以及整个系统定深和展开性能的影响,并根据结果制定定深和展开策略。拖曳航速为4、5和6 kn,拖缆长度30、50、80 m,水平舵角调节范围[-10°,10°],垂直舵角调节范围[-15°,15°]。试验地点位于湖北宜昌清江水域隔河岩至巴山段。湖试内容主要包括试拖试验和正式拖曳试验。
正式拖曳之前要进行拖体试拖试验,根据试拖结果通过水平舵或垂直舵对拖体姿态进行调节,使拖体达到正浮状态,之后开展正式拖曳试验,试验流程如图6。
图6 试验流程
试验中拖体定深以静水面为基准,展宽以船中纵轴线为基准。压力传感器实时测量拖体深度,水声应答器通过船端基阵应答来确定拖体的相对位置,结合基阵的GPS坐标最终得出拖体的实际位置,倾角传感器通过母船控制端实时读出俯仰及横滚数据。
2 试验结果
试验中拖体姿态角及翼板攻角方向按照图7中右手坐标系,即:拖体仰艏为正,埋艏为负,右倾为正,左倾为负,拖体水平翼板攻角和水平舵板舵角向上为正,向下为负,垂直翼板攻角和垂直舵板舵角右转为正,左转为负。
图7 随体坐标系
2.1 试拖试验
试拖试验目的是初步了解拖体重浮心和拖曳点的匹配度。低航速下拖体受到流体力较小,更易反映出拖体自身性能。以航速4 kn作为初始航速开展试拖试验。
图8为不同攻角下俯仰和横滚变化曲线,俯仰角变化范围5°~6°,水平翼板力的作用点位于质心后方,随着攻角的增大,产生抬首力矩。俯仰角始终保持在5.50左右,拖体本身作为一个大升力体会产生向上升力,需通过后水平舵板将主拖体调节到正浮状态;横滚角范围-0.40°~0.7°,角度较小符合试验要求,无需对横滚进行调整。
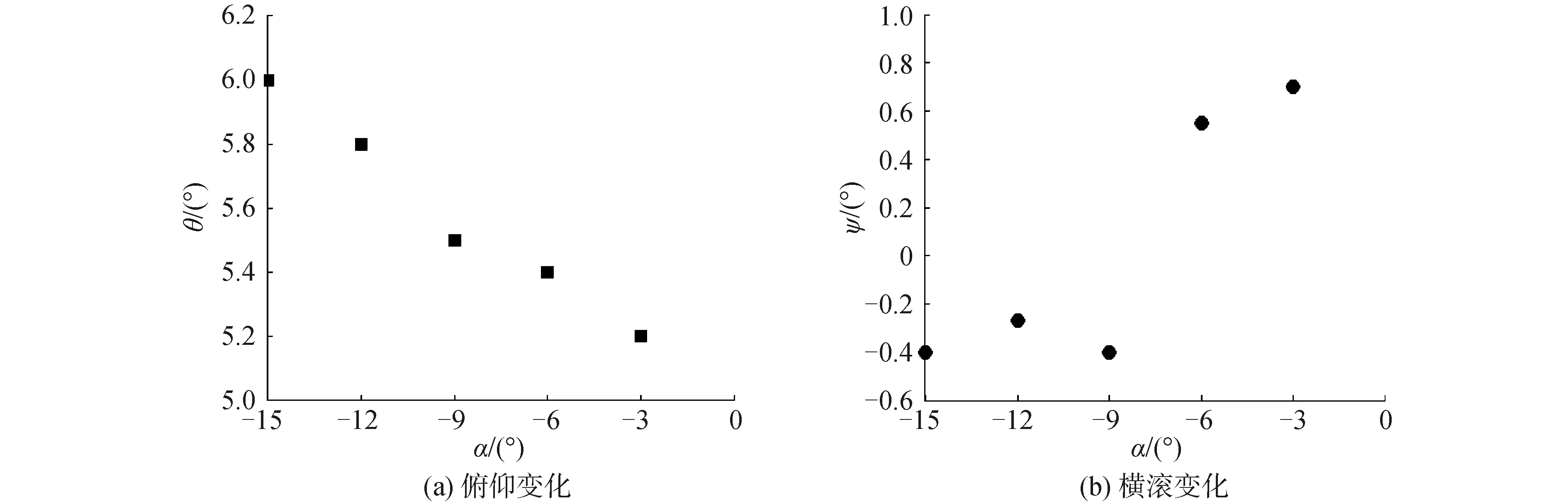
图8 俯仰和横滚变化
图9为不同航速下舵板对俯仰姿态的调节结果。随着水平舵板舵角β的增加,拖体逐渐接近正浮姿态,改变拖曳航速后需重复操作,确保拖体姿态满足拖曳要求,航速4、5、6 kn水平舵板角度分别为15°、15°、12°,不同航速下正式拖曳时,保持各自舵板角度不再调整。
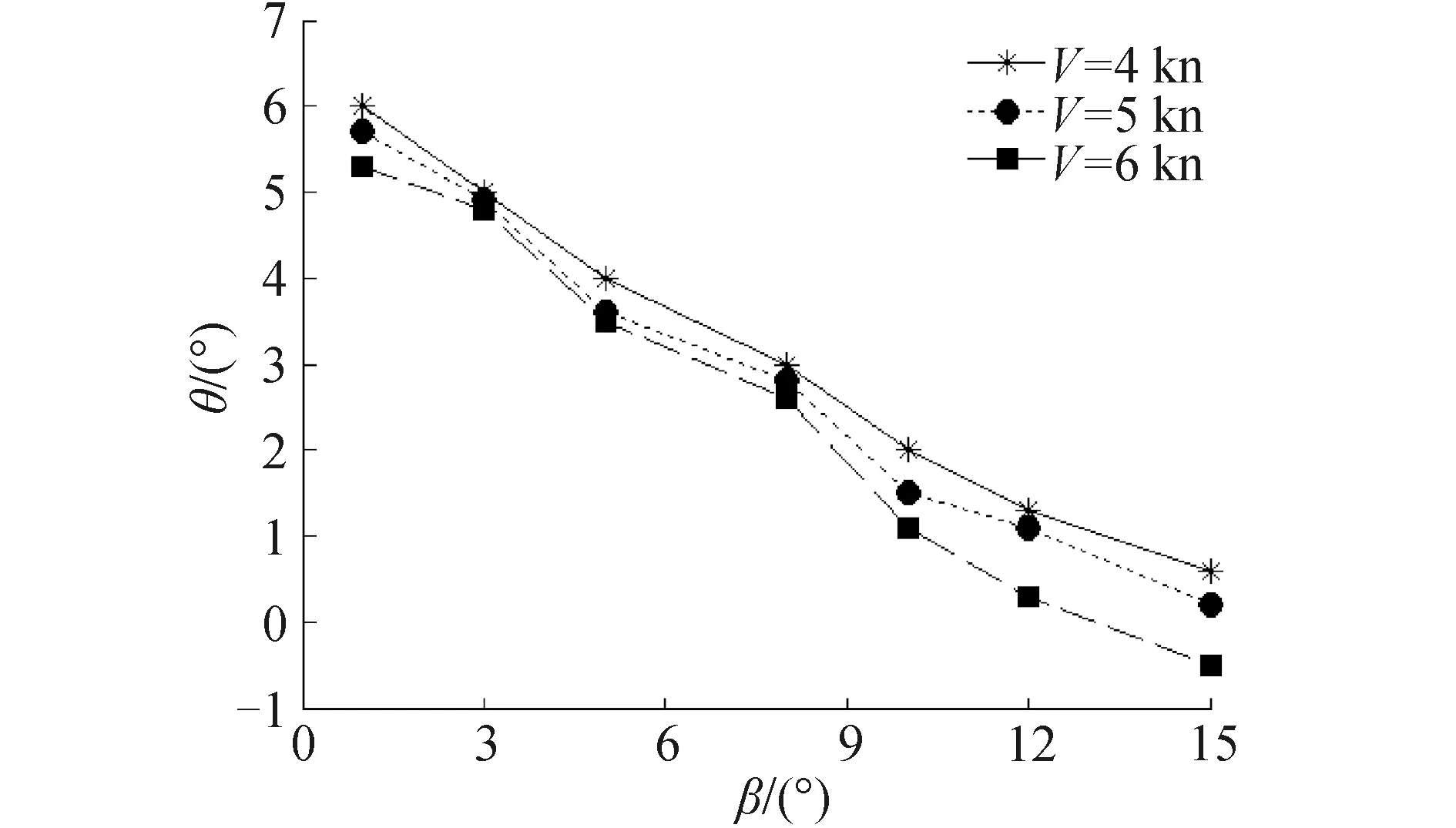
图9 舵板调节能力
2.2 正式拖曳试验
将姿态调整后的拖体重新布放下水,放缆长度30 m,稳定拖曳之后,改变水平翼板或垂直翼板攻角,每改变一次攻角,稳定拖曳时间不少于5 min,得到不同航速和缆长情况下拖体定深、展宽和拖缆受力情况。
2.2.1 定深试验结果
通过改变水平翼板攻角、航速和缆长探索影响拖体定深和干端拉力的主要因素,研究拖体定深规律。对于拖曳系统而言,干端指船艉和拖缆相连接的位置,该位置拖缆受力最大,也是拖缆破断拉力校核的基础拉力。
图10和图11为改变航速和攻角得到的定深和拖曳力变化曲线,拖体定深和干端拉力与翼板水平攻角呈线性关系,翼板攻角越大,定深越深,干端拉力越大,30 m缆长的最大定深近25 m。随着航速的增加,拖体升阻力和拖缆切、法向阻力增加,使得重力在整个拖曳系统受力中的比例降低,引起垂直干端角度φ(船艉处拖缆切线与作用点法线方向所成夹角,tanφ=(w+FL)/FF,w为拖曳系统重浮力差,FL为升力,FF为阻力)逐渐减小,拖缆后伸距离增加,定深减小。干端拉力随航速的增加而变大,航速越高,翼板所能产生的升阻力越大,图11中曲线斜率越大,干端拉力对攻角变化也就越敏感。降低航速和增加翼板攻角都能起到增加拖体定深的效果。
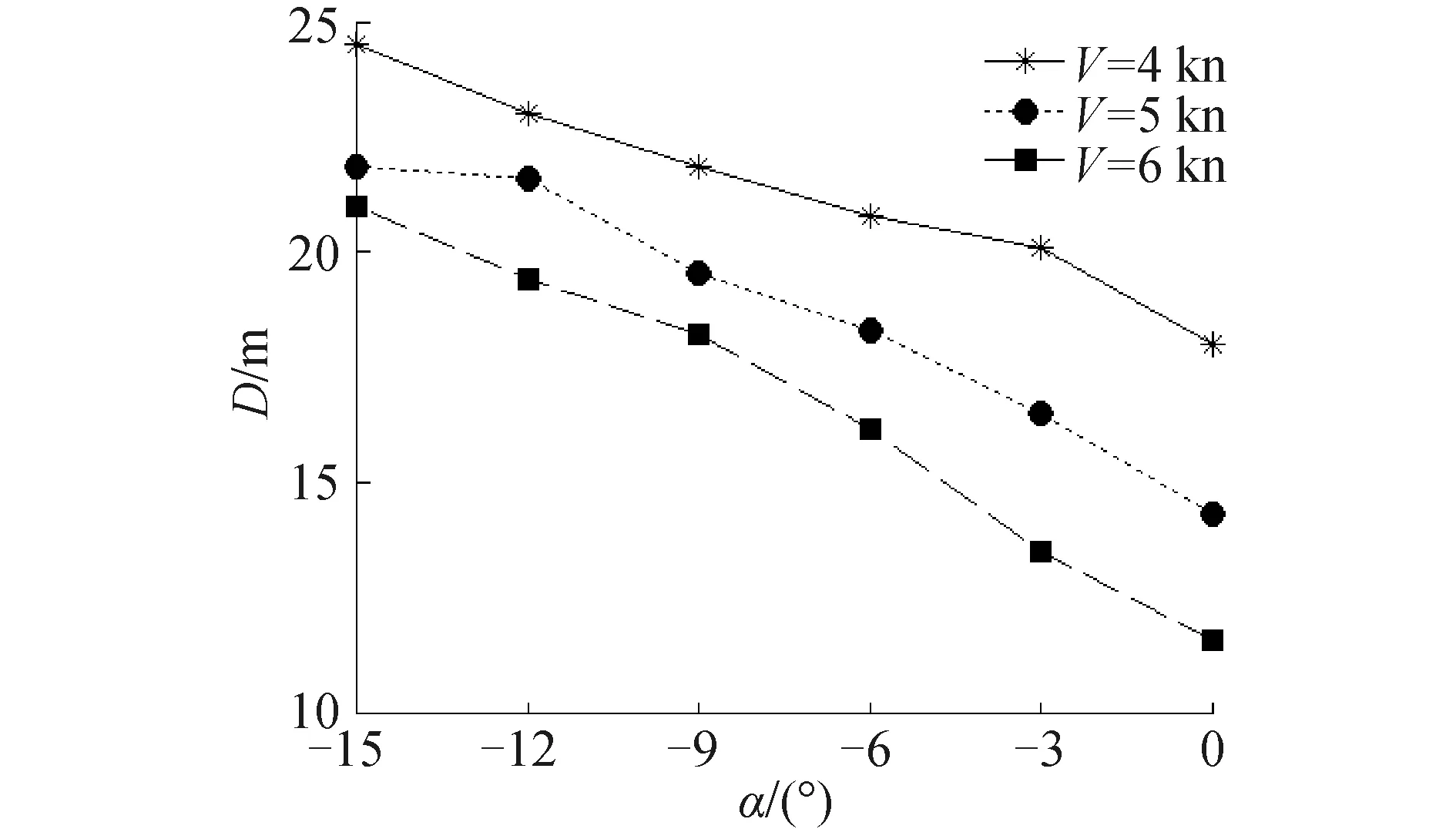
图10 定深随攻角和航速变化
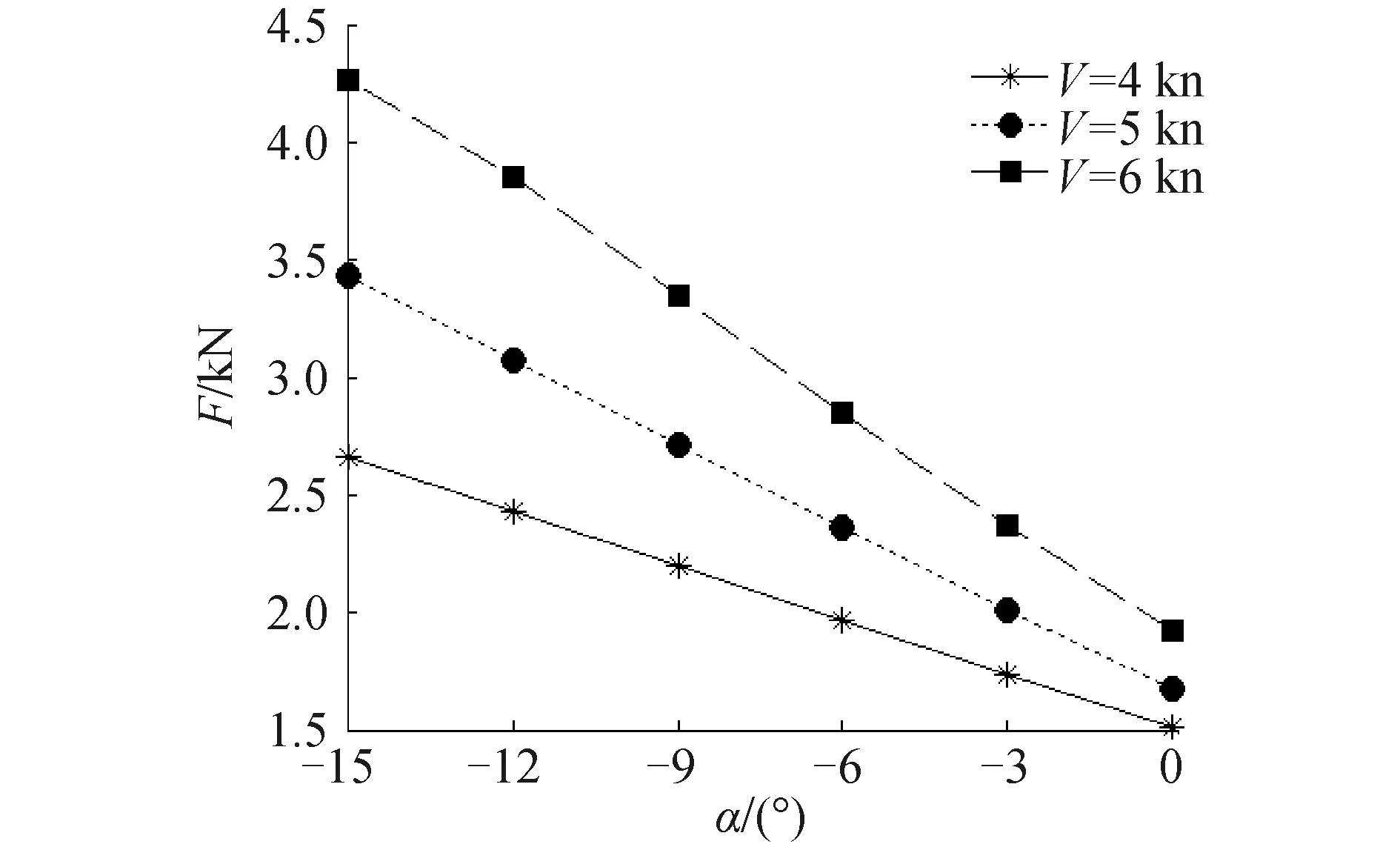
图11 拖曳力随攻角和航速变化
对不同航速下拖体定深效率进行进一步分析,结果如图12所示,图中定深效率为深长比,即d=D/L×100%。随着翼板攻角的增加,拖体定深效率逐渐变大,最大达到80%。原因在于:翼板攻角变大,翼板升阻比增加,流体力占比提高,拖缆垂直干端角变大,翼板阻力增加所引起拖缆的后伸效果要弱于升力增加所引起的定深效果;由于低航速下,重力对定深起到主要作用,所以航速越低,定深效率越高,定深效果越好。拖曳航速过低虽可以在有限缆长下增加探测范围,但也会增加拖曳探测的时间成本,拖曳航速过快则会加大拖曳定深的难度。

图12 不同航速下拖体定深效率
保持6 kn航速,将缆长由30 m逐渐增加到50 m和80 m,分析不同缆长对拖曳定深和干端拉力的影响。
由图13和图14结果来看,随着缆长的增加,拖体定深逐渐增加,曲线斜率变大,定深对翼板攻角的变化越敏感。缆长的增加也会引起拖曳系统所受重力比例增加,垂直干端角变大,引起空间内缆型发生变化。放缆50 m,干端拉力平均增加力500 N,可见,拖曳系统干端拉力的增加主要是由拖体翼板攻角变化引起,但对于缆长达上千米的深拖而言,缆长对干端拉力的影响不能忽略。
图13 定深随攻角和缆长变化

图14 拖曳力随攻角和缆长变化
根据图15结果分析,不同缆长情况下,定深效率皆随攻角增加而变大,最大70%。随着缆长的增加,定深效率逐渐降低,缆长增加所引起的阻力增值要大于重力增值,造成定深效率降低,如何降低拖缆的切、法向阻力也是增加拖曳定深的一种思路。

图15 不同缆长下拖体定深效率
目前增加定深的方式主要有增大翼板攻角,降低航速和增加缆长3种,其中通过翼板攻角进行定深调节更便于深度的控制,优先考虑该种定深方式。本文涉及的拖体为重力型拖体,拖曳航速一般6 kn以内,单独通过翼板定深有较大局限性,对定深影响因素进行多元拟合,得到非线性拟合函数:
绘制各影响因素以及拟合图形如图16所示。图16中数据点为试验数据点,曲面为拟合曲面,数据点大多落在曲面上,拟合函数有较高的准确性。相比于通过收放缆来调节定深,改变航速具有更高的效率,但一般海洋拖探对时间有较高的要求,且母船拖曳航速变化范围有限,加之攻角改变和定深呈线性关系,因此优先考虑通过增加翼板攻角完成定深,在增加翼板攻角仍无法达到定深的情况下再通过放缆来增加定深,最后考虑降低航速。

图16 定深拟合函数
2.2.2 展开试验结果
本文拖曳系统中的拖体兼具定深和展开功能,需要增加探测宽度时,拖体通过自身垂直翼板可实现展开功能。通过展开试验研究垂直翼板攻角、航速、缆长对展宽的影响,初步探索有效调节展宽的方法。
图17可知,垂直翼板攻角与展宽呈线性关系,攻角越大,展宽越宽,最大展宽达到15 m,展开率最大达50%。展宽随航速的变化不明显,原因在于展宽方向上没有重力的参与,拖体自身升阻力是展开过程中的主要作用力,翼板攻角作为升阻力变化的主要因素,其升阻比随航速变化不明显,水下缆型变化随航速未发生明显变化,拖体展宽受航速影响很小。

图17 展宽随攻角和航速变化
图18可见,拖缆张力与垂直翼板攻角呈二次函数关系,垂直翼板攻角大于9°后,张力急剧增加。对比图19和图12,相同航速和翼板攻角下,展开引起的拖缆张力最值要小于定深。

图18 拖曳力随攻角角和航速变化

图19 展宽随攻角和缆长变化
对比图20中不同攻角、不同航速下拖体展开效率不难发现:随着翼板攻角角的增加,翼板升阻比增加,拖缆水平干端角γ(船艉处拖缆展开力方向与作用点法线方向所成夹角,tanγ=FZ/FF,FZ为展开力,FF为阻力)变大,拖体展开效率增加,最大达到50%;展开效率随航速变化不明显。

图20 不同航速下拖体展开效率
保持6 kn航速,将缆长由30 m逐渐增加到50 m和80 m,进一步研究不同缆长对展宽和干端拉力的影响。
随着缆长的增加,拖体展宽逐渐增加,图19中曲线斜率也逐渐变大,表示展宽对垂直翼板攻角的变化越敏感。缆长的增加会引起拖曳系统阻力的增加,带来干端拉力变大,如图21所示。相同翼板攻角下,干端拉力的变化主要是由于缆长引起,进一步对比缆长对展开效率的影响,见图22。
图21 拖曳力随攻角和缆长变化
图22 不同缆长下拖体展开效率
拖体展开效率随缆长增加而降低,该规律与定深相同。随着缆长的增加,拖缆切向阻力和法向阻力皆增加,二力在纵向合力要大于横向合力,引起水平干端角变小,展开效率降低。
对定深影响因素进行多元拟合,得到拟合函数:
K=0.035 8V2-0.13V-0.001L2+0.138L-
0.625α-0.011αL-3.86
绘制如图23所示的拟合图形。
图23 展宽拟合函数
目前增加展宽的方式主要有增大翼板攻角和增加缆长,航速小范围变化对拖体展宽和展开效率的影响较小,本文涉及的拖曳系统不考虑该种调节方式。通过翼板攻角进行展宽调节更加便利、有效,优先采用该方式对展宽进行调节,其次可通过收放缆进行进一步展宽调节。
3 结论
1)本文试验的拖体具有良好的定深和展开性能,最大定深和展开效率分别为80%和50%,进行类似拖体设计时,该种结构和姿态调节方式可为今后设计提供参考;
2)拖体定深主要受航速、翼板攻角和缆长影响,展宽主要受翼板攻角和缆长影响,且都与翼板攻角呈线性关系,在定深或展宽范围变化不大的情况下通过翼板调节最便利;
3)增加水平翼板下攻角、降低航速、增加缆长皆可以增加定深,增加垂直翼板攻角、增加缆长可以增加展宽,但缆长的增加也会引起拖体定深和展开效率的降低;
4)各影响因素对拖曳定深、展开的作用规律及耦合影响可以通过定深、展开拟合函数体现。
本试验研究得出的结论以及回归函数适用于缆长较短的拖曳系统,对于上千米的深拖还需进一步研究。
