多水下机器人自航纵向编队的操纵运动数值模拟
2022-02-16吴利红黄晴王诗文封锡盛李一平李硕
吴利红, 黄晴, 王诗文, 封锡盛, 李一平, 李硕
(1.大连海事大学 船舶与海洋工程学院,辽宁 大连 116026; 2.中国科学院 沈阳自动化研究所,辽宁 沈阳 110016)
多水下机器人(autonomous underwater vehicles, AUVs)相对单体AUV具有高效率、鲁棒性好等优点,可以分布于广阔水域进行海洋环境调查,水下目标搜寻和水下信息组网等广泛作业[1-3]。多AUV的流场干扰是多AUV系统协作的一个基本问题,是多AUV近距离协同作业或AUV接近障碍物过程中的控制和避碰的前提[4-5],探究多体干扰的流场内在规律,有助于避免多体之间的不利干扰,提高多AUV系统的安全性;利用多体之间的有利干扰,提高能源的有效应用[6-7]。目前国内外针对椭球体、圆柱体、不带附体的梭形体、带舵翼的鱼雷型载体、带舵翼和桨模块的AUV模型的编队运动进行了研究。
庞永杰等[8]采用面元法计算了水下2个椭球体相互接近过程中水动力系数随物体间距的变化。于定勇等[9]用数值方法分析并列双圆柱体的尺寸,间距对圆柱漩涡脱落,升力和阻力等的影响关系。周杰等[10]采用粒子图像测速仪(PIV)研究了不同间距比的串列双圆柱的绕流现象。Zhang 等[11]对大小不同的2个鱼雷型体AUV的不带舵翼,带舵翼2种情况下的纵向、横向不同间距,带漂角和距水面不同距离的拖曳运动的定常流场进行了探讨,从降低阻力和安全性2个角度提出了有效编队方式。Muhamad[12]对不带舵翼的鱼雷型载体展开2个AUV的纵向编队,3个AUV的梯形编队下的AUV阻力性能研究。Randeni 等[13]采用动网格技术研究了不带附体的AUV 在一个大水下机器人侧面做简谐振荡前进过程中的纵向力、横移力和回转力矩变化。以上研究都是基于简单形状、不带附体、不带螺旋桨的模型,庞永杰等[14]通过垂直型平面运动机构对无桨和带桨全附体潜艇模型完成拘束模型试验,表明带桨模型的水动力系数与无桨模型有较大的差距,螺旋桨的存在对潜艇的运动有一定的影响。Rattanasiri等[15]通过采用体积力法模拟虚拟螺旋桨的作用,研究了双椭球体带虚拟螺旋桨的纵向、横向不同间距的自航编队过程中的水动力变化,结果表明带螺旋桨的自航编队和不带桨的拖曳编队产生的能耗损失不同;不同间距、不同布置形式会导致不同领航者和追随者不同的能耗。以上关于编队的数值模拟都是基于简单模型、拖曳编队,与真实载体的自航编队运动有较大的差距。
本文基于前期AUV带离散螺旋桨的自航数值模拟的基础[16-17],采用类物理数值模拟方法,对双AUV带离散螺旋桨旋转推进AUV航行的编队(简称“自航编队”,AUV不带螺旋桨的拖曳运动编队简称为“拖曳编队”)的非定常运动响应进行实时模拟。从阻力、推力、速度、间距和能耗的动态变化以及流场的瞬时特性,分析AUV自航编队耦合流场的干扰作用过程,为双AUV编队的安全性和能耗评估提供参考。
1 数值模拟方法和求解设置
1.1 几何模型
研究中的串行编队AUV采用等大小AUV,其形体采用改进型REMUS AUV,长L=1.74 m,直径d=0.191 m,艉部布置“十”字形舵翼和一个MAU4-40螺旋桨。如图1所示,在纵向编队中,前后AUV分别为B2和B1, 纵向间距为D。几何模型中按照右手法则建立大地坐标系E-ξηζ和载体坐标系G1-x1y1z1,G2-x2y2z2。其中Eξ指向AUV直航方向,Eζ垂直指向地心。G1和G2分别对应AUVB1和AUVB2的浮心。G1x1和G2x2分别为AUVB1和AUVB2纵对称轴。大地坐标系用于计算编队AUV航行过程中对地的速度、位移。载体坐标系用于解算AUV自航运动过程中的局部受力、速度。将载体系中的运动速度采用空间坐标转换,可以实时获得双AUV实时大地系下的速度和位置。

图1 纵向编队双AUV模型
1.2 网格模型
双AUV自航编队网格模型采用自航AUV的网格划分方法[16],整个流域为圆柱型流域,由多块混合网格构成,如图2所示。其中图2(a)、(b)分别为AUV整体网格模型和艉部螺旋桨舵翼网格图。图2(c)显示平面上多个子区域网格。在双AUV的直航区域,由前至后分别为Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ 5个区域。其中区域Ⅰ位于AUVB2之前;区域Ⅱ为AUVB2区域,区域Ⅲ为AUVB2和AUVB1之间的区域;区域Ⅳ为AUVB1区域;区域Ⅴ位于AUVB1之后。区域Ⅵ为外围非结构网格。区域Ⅰ、Ⅲ、Ⅴ为结构网格。区域Ⅱ和区域Ⅳ为AUV流域,包括AUV附带舵翼网格,螺旋桨2个子区域,其中AUV,舵表面和体网格都为结构网格;螺旋桨和螺旋桨流域采用非结构网格。总网格数为3 172 868。在AUV自航编队中,螺旋桨和螺旋桨子区域随螺旋桨旋转,将力传递给AUV,跟随AUV航行;而区域Ⅰ、Ⅲ、Ⅴ做相应的网格拉伸或压缩。

图2 双AUV自航纵向编队网格模型
2 数值验证


图3 敞水试验的试验与数值结果对比

图4 AUV自航试验速度对比
3 自航编队数值计算
给定双AUV纵向初始间距D/L=1.25。自航纵向编队开始时,双AUV初始速度为零。在恒定螺旋桨转速n=600 r/min下,双AUV开始自航航行。在相互作用的耦合流场下,双AUV呈现出不同于单体自航AUV的运动特性,如图5~10所示。图中B1、B2分别为双AUV的追随者和领航者,S为单体自航AUV;B1_np、B2_np分别为拖曳编队的追随者和领航者。分析对比其运动特性和流场特征,可获得双AUV自航纵向编队的节能特性和安全性。
3.1 自航编队水动力特性
图5为自航编队AUV(B1和B2)和单AUV(S)不同时刻的速度变化曲线。在恒定转速作用下,AUV速度从零开始增加直至接近匀速[16]。从航速而言,相同长的流域,由于编队AUV的间距存在,单体自航AUV的航程可更远,航行时间更长,航速更大。在1.5 s内三者速度可增加到0.5 m/s,此速度范围内,单体和双体的速度曲线几乎重合;大于临界速度0.5 m/s时,追随者速度开始出现显著下降;到5 s时,其下降幅度达15.5%。而领航者的速度几乎和单体重合,略微下降,最大下降幅度为1.5%。

图5 单体和双体自航AUV的速度曲线
为了分析和比较编队AUV的阻力特性,将编队AUV的阻力与自航单体,拖曳编队AUV的对比,同时去除动态速度变化的影响,将这3种情况下的阻力用阻力系数表示,如图6所示。其中图6(a)为覆盖全部航速的阻力系数曲线,为了清晰可见不同航速范围内的阻力系数变化,将总图6(a)分为3段:0.1~0.5 m/s、0.5~1.0 m/s、1.0~1.6 m/s分别为图6(b)~6(d)。由总图6(a)可见,随着AUV速度增加,总阻力系数降低(注:AUV水下航行无兴波,总阻力系数等于粘性阻力系数),这与文献[19]关于粘性阻力系数的结果一致。在速度0.1~0.5 m/s范围内:1)拖曳AUV的领航者和追随者阻力系数相等,都小于自航单体和自航编队AUV,这源于拖曳AUV少了螺旋桨附体引起的阻力;2)编队AUV的领航者的阻力系数略微小于自航单体的。编队AUV的追随者阻力系数最大。在0.5~1 m/s范围内:1)拖曳AUV的追随者阻力系数开始下降,相反,拖曳AUV的领航者阻力系数开始增加,当拖曳AUV领航者的速度超过0.75 m/s左右,拖曳AUV领航者的阻力系数开始大于自航单体的阻力系数;2)编队AUV的领航者阻力系数开始增加,大于自航单体的阻力系数。编队AUV的追随者阻力系数最大。在1~1.6 m/s范围内:拖曳AUV领航者阻力系数甚至大于编队AUV的领航者阻力系数。拖曳AUV的追随者阻力下降显著;2)编队AUV的领航者阻力系数渐趋于自航单体,编队AUV的追随者阻力系数最大,但是下降显著,也渐趋于自航单体。从编队AUV和拖曳编队AUV的阻力系数变化可见,阻力系数呈现阶段性,与AUV的速度、相对间距相关。

图6 单体,拖曳和自航编队AUV的阻力变化
推力方面,由图7相应的进速系数下的推力系数对比可见,在进速系数小于0.3时,自航编队追随者的推力系数和领航者,单体自航AUV保持一致;随着进速系数增加,自航编队追随者的推力系数下降显著。而自航编队领航者的推进系数和单体自航AUV始终保持一致,受追随者影响较小。图8是领航者和追随者的间距,1 s之前,两者的距离基本保持不变,表明两者具有相同速度,而后距离逐渐增加,表明领航者速度大于追随者。
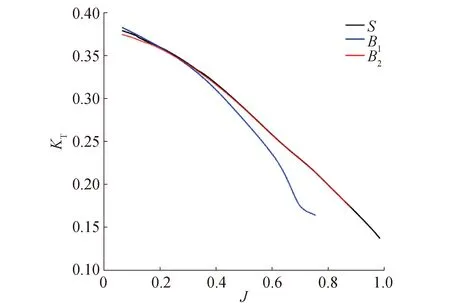
图7 单体和双体AUV的推力系数

图8 自航编队双AUV的间距变化
图9给出了达到相同速度所需要的能耗,自航编队过程中,在速度小于0.5 m/s临界点之前,自航编队领航者和单体自航AUV的能耗相等,随着航速增加,领航者的能耗略有增加。相对而言,追随者从开始时刻,能耗相对自航单体和领航者都较大,在航速1 m/s左右,能耗增量最大。拖曳AUV编队中,追随者在速度大于0.9 m/s左右,出现低能耗,而相应的领航者出现高能耗。
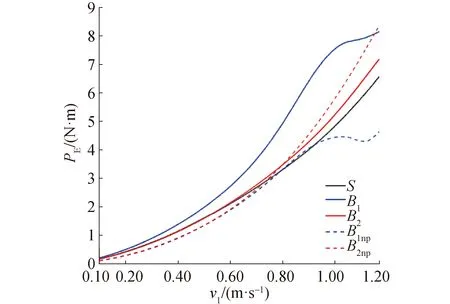
图9 单体、拖曳和自航编队AUV能耗对比
在自航编队过程,领航者的尾迹(包括螺旋桨的梢涡和桨毂的毂涡)会传递到追随者,尤其是螺旋桨的梢涡呈螺旋形向后传播,引起追随者横滚力矩变化,此力矩与螺旋桨的扭矩幅值相当,导致追随者产生横滚。追随者的横滚力矩变化呈现3个阶段,如图10所示。第1阶段,约3 s之前,在领航者的螺旋桨艉迹未传递到追随者之前,追随者横滚力矩几乎为零。第2阶段,3.5~4.0 s,当领航者的艉迹部分传递给追随者,追随者的横滚力矩呈现增加趋势;第3阶段,t>4.0 s之后,当领航者的螺旋桨尾迹完全传递给追随者,追随者的横滚力矩呈现稳定下降趋势,下降的原因是由于领航者与追随者间距增加,领航者的螺旋桨尾迹强度变弱引起的。此外,追随者的横滚力矩呈现周振荡特性,在第2阶段幅度较小,第1和第3阶段较大。领航者横滚力矩较小,在零附近振荡。

图10 自航编队AUV横滚力矩变化
3.2 拖曳编队流场特性
为了和自航编队对比,给出了图11的拖曳AUV编队不同时刻速度云图。随着领航者速度增加,其扰动流场范围扩大,当t=2.8 s之前,领航者艉迹还未传播到追随者,对追随者的流场无影响。随着领航者航速增加,其艉迹继续往后传播,当t=3.5 s, 领航者的艉迹和追随者的首部流场干扰,由于领航者艉迹呈现向前运动趋势,因此其具有吸附追随者的作用,从而导致追随者速度增加,功耗降低,而领航者由于额外拖曳追随者,导致阻力和功耗增加。
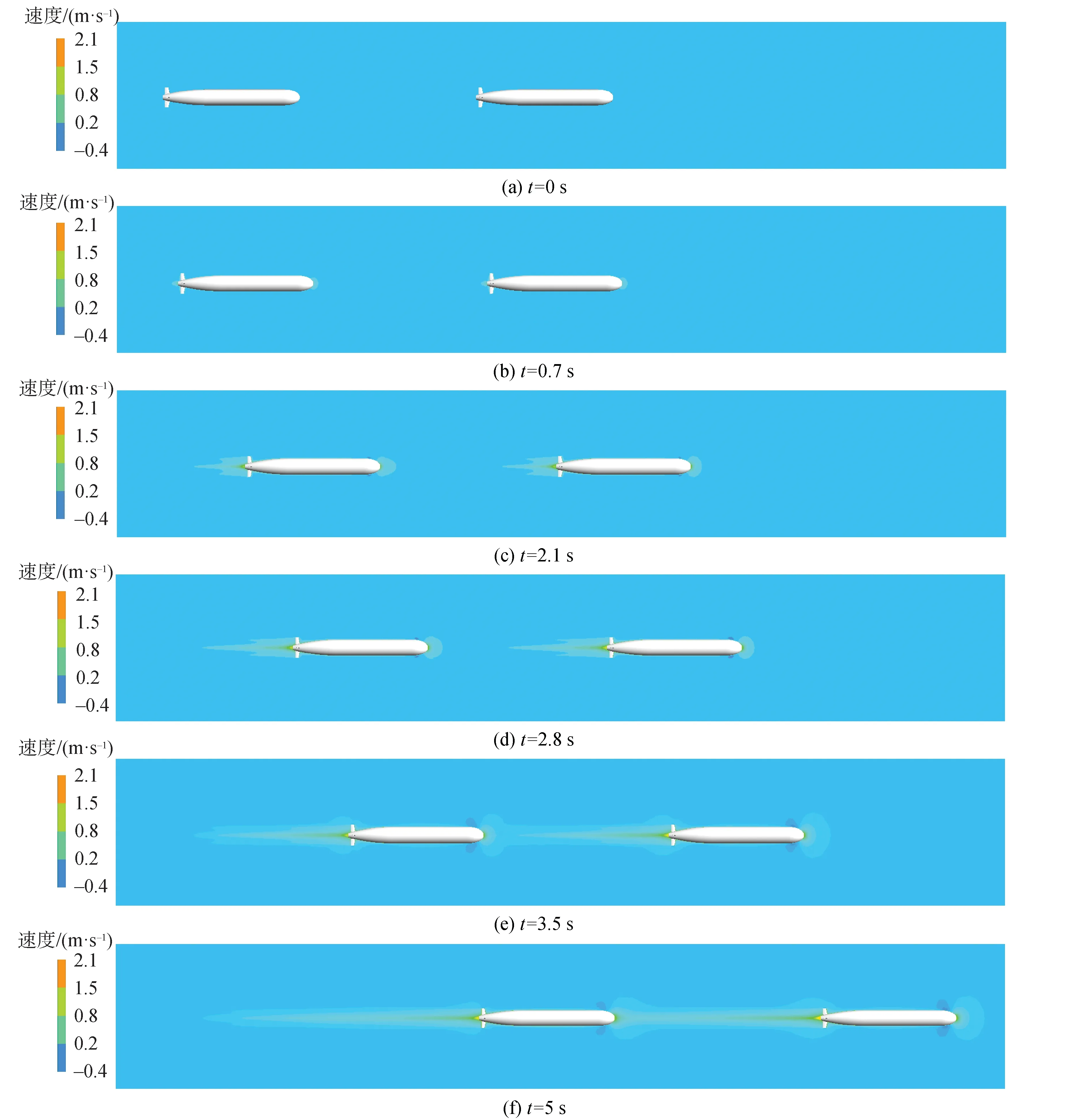
图11 拖曳编队AUV的瞬时速度
3.3 自航编队流场特性
图12为自航编队AUV的瞬时速度云图。从左到右依次是追随者首部放大图,自航编队AUV全图和领航者AUV艉部放大图。由右图可见,领航者的艉迹包括螺旋桨梢涡和毂涡,梢涡在毂涡的外围,梢涡向后传播,毂涡向前传播。随着时间增加,领航者梢涡和毂涡强度减弱;随着领航者速度增加,其进程增加,则梢涡重叠度降低,梢涡清晰可见。从中部图可见,领航者AUV的前体部分流场未受两者流场干扰,后体部分的螺旋桨和AUV的艉迹严重影响追随者的流场。当领航者的艉迹传递给追随者,最先到达追随者AUV的艏部流场,干扰追随者艏部流场(如图左所示),使追随者AUV逆流航行(见左图2.8,3.5,5 s),使其阻力增加,航速降低。同时由于追随者AUV对领航者滑流的截断,这部分滑流扩大了追随者的绕流场,同时使追随者流场分布不对称,产生横滚扭矩作用。随着两者间距的增加,滑流的强度减弱;随着时间的增加,追随者被领航者的滑流完全包围,呈现较为稳定的流场,此流场范围仍然比领航者大,呈现较大的阻尼效应。
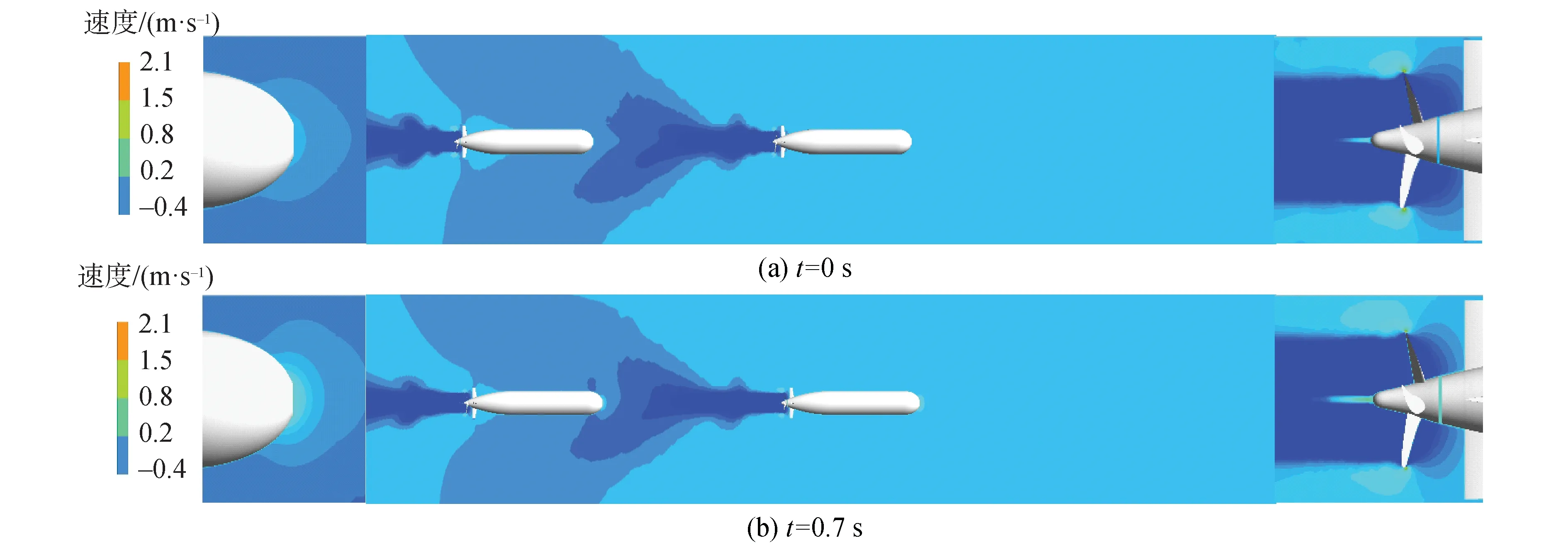
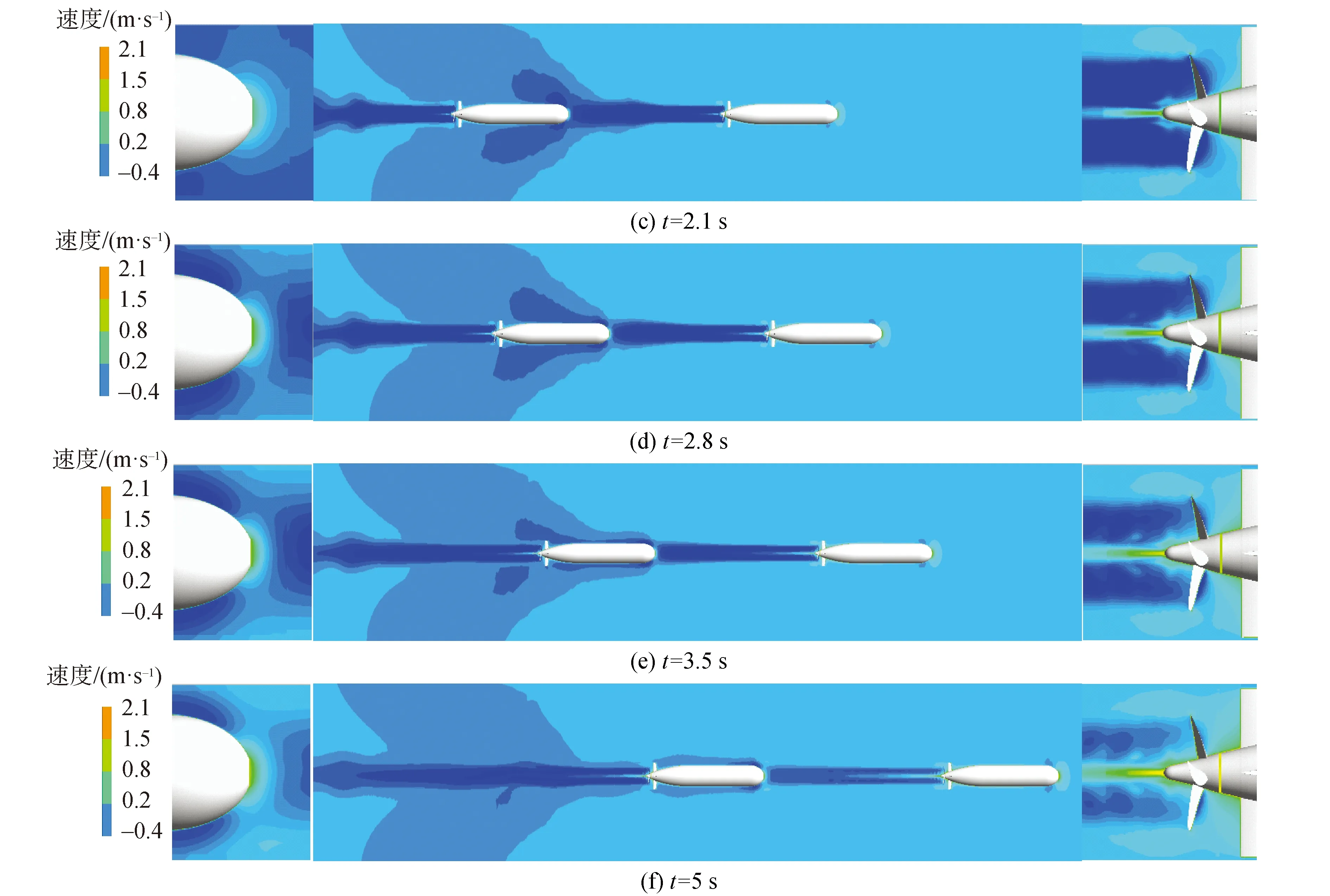
图12 自航编队AUV的瞬时速度
4 结论
1) 速度和间距:在临界速度0.5 m/s之前,领航者和追随者具有相同的速度,保持同步前进;超过临界速度0.5 m/s, 领航者速度和单体自航速度一致,而追随者速度显著下降,两者间距增加,追随者逐渐落后。
2) 阻力系数和能耗:编队AUV的领航者接近自航单体,而编队AUV的追随者阻力系数相对自航单体大大增加,表明领航者对追随者有斥力作用,随着两者间距增加,领航者对追随者的斥力减小,追随者的阻力系数开始下降。相同速度下追随者能耗增加。
3) 推力系数:领航者推力系数变化较小,而追随者超过临界进速系数,推力系数下降显著。
4) 横滚力矩:追随者受领航者滑流的影响,会产生周期性振荡、幅度变化的横滚力矩。
