一种用于农机无人驾驶自动控制系统的开发与应用
2022-01-25荆毅
荆 毅
(广东皓行科技有限公司,广东 佛山 528300)
1 主要内容和关键技术
农机主要涉及两大类型,一种是拖拉机,另一种是自走式农机(收获机、植保机、插秧机、青饲料收获机等)。前者主要体现在作为动力源,通过自身动力的输出,牵引和传递动力,挂接不同需求的农机具实现农业场景的耕、种作业;自走式农机作为自带动力,实现各种农作物的收割、植保等作业。现阶段两种主要类型农机作业过程中功能的实现,其操纵控制方式主要通过人工操纵来实现,辅助驾驶主要是AB线的作业路径,作业全程无法实现纯无人驾驶和远程控制。
无法实现全程无人驾驶控制技术,主要是由于机械本身的原理结构很大程度上限制了无人驾驶技术的实现。虽然近几年在收获机行驶系统中引入了静液压驱动技术,收获机的行驶速度可以通过单杆操纵手柄来实现加减速与车辆停止,极大地方便了机手的操作,减轻了机手的操作强度,由于操作的便利性,同时也提高了整机的工作效率,增加了机手的收益。但是真正要实现农机的无人驾驶进行农田作业,静液压驱动控制技术还远远不够,还需要一系列措施和技术方案的应用来替代机手的操作。
2 实施方案
农机实现无人驾驶和自动控制,关键是解决农机在多种场景下通过各种智能控制元件、传感器、集成控制器、农机通信设备(包括串口、CAN总线、4G/5G通信模块、电台、GNSS全球导航卫星系统等)、执行机构、电磁液压阀/比例阀、驱动执行器以及导航控制技术、融合算法,沿着规划的路径完成各种指令动作。
2.1 行驶系统
2.1.1 转向控制
转向控制硬件采用电动方向盘+角度传感器,通过安装在农机转向轮位置的角度传感器实时监测和反馈转向轮转过的角度。角度传感器将转过的角度信息上传到控制器,控制器根据导航定位到农机的姿态信息进行融合算法,计算车辆实际行驶轨迹与预设规划好的行驶路径进行对比,超出精度控制范围之外的数据又进行融合分析计算,依据计算结果校正车辆的姿态。控制器将控制指令传送到方向盘电机上,接收到指令的电机输出转动,转动的电机通过连接的花键套驱动花键轴转动,转动的花键轴驱动全液压转向器提供液压输出,输出的油液驱动转向油缸的伸缩,从而使车辆转向轮按照要求完成转向,使受控车辆向左或者向右转向行驶,校正车辆的运行姿态,使车辆实际行驶路径无限趋近预设规划路径,保持重合,其控制流程框图,如图1所示。除电动方向盘和角度传感器的组合控制转向以外,还有电液比例阀与角度传感器的组合,实现同样的转向控制,角度传感器监测转向轮转过的角度,将转过的角度信息上传到控制器,通过控制器的融合算法,将控制信号传送到电液比例阀组,通过电液比例阀的开启和流量大小控制转向油缸,从而完成转向。
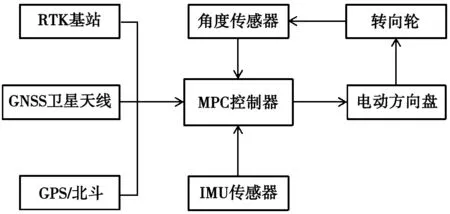
图1 自动驾驶转向系统架构流程
2.1.2 北斗/GNSS定位设备
通过安装在车辆上的北斗/GNSS设备,主要包括北斗/GNSS天线、组合导航X1、4G路由器、4G天线和控制线束,通过硬件设备接收的信号进行差分融合计算,确定受控车辆的姿态位置。
2.1.3 线控底盘
车辆底盘控制是无人驾驶很重要的一项控制,控制精度的优劣直接影响农机的作业性能和精确度,机器本身的性能优势也是需要线控底盘的控制性能决定。线控底盘的控制主要涉及车辆的离合、制动、油门、挡位的综合联动控制。农机挡位在动力换向方面已经有成熟的技术和实际应用,无人驾驶模式下的控制可以通过CAN总线直接控制其换向执行机构,实现车辆的前进、停止和后退功能的改变。动力换挡和CVT换挡在国内机型上还没有完全实现在农田作业中的大量使用,其技术和车辆本身的可靠性目前还处于试验测试阶段。这也是目前农机真正实现纯无人驾驶操作的技术攻关阶段。随着控制技术的发展和车辆制造水平的提高,通过CAN总线方式控制农机实现换挡是实现农机无人驾驶操作的必要前提。
在传统换挡技术与动力换挡、CVT换挡过渡阶段,实现农机的无人驾驶操作,就需要解决农机操作过程中离合、制动和油门线性控制,通过CAN总线方式控制执行机构按照功能需求完成动作的执行与过程控制。通过控制离合、制动和油门,可实现车辆的自动点火、熄火、启动、停止、加速、减速等联动动作,完成农机在无人操作模式下的远程控制。
根据图2离合、制动和油门控制结构图技术方案,离合、制动以及油门的控制实现自动与手动操纵并存,集成控制器接收车辆反馈信息,根据车辆所处状态,进行数据分析,同时根据功能需求,下发执行机构的控制指令,执行机构完成离合、制动与油门的动作。
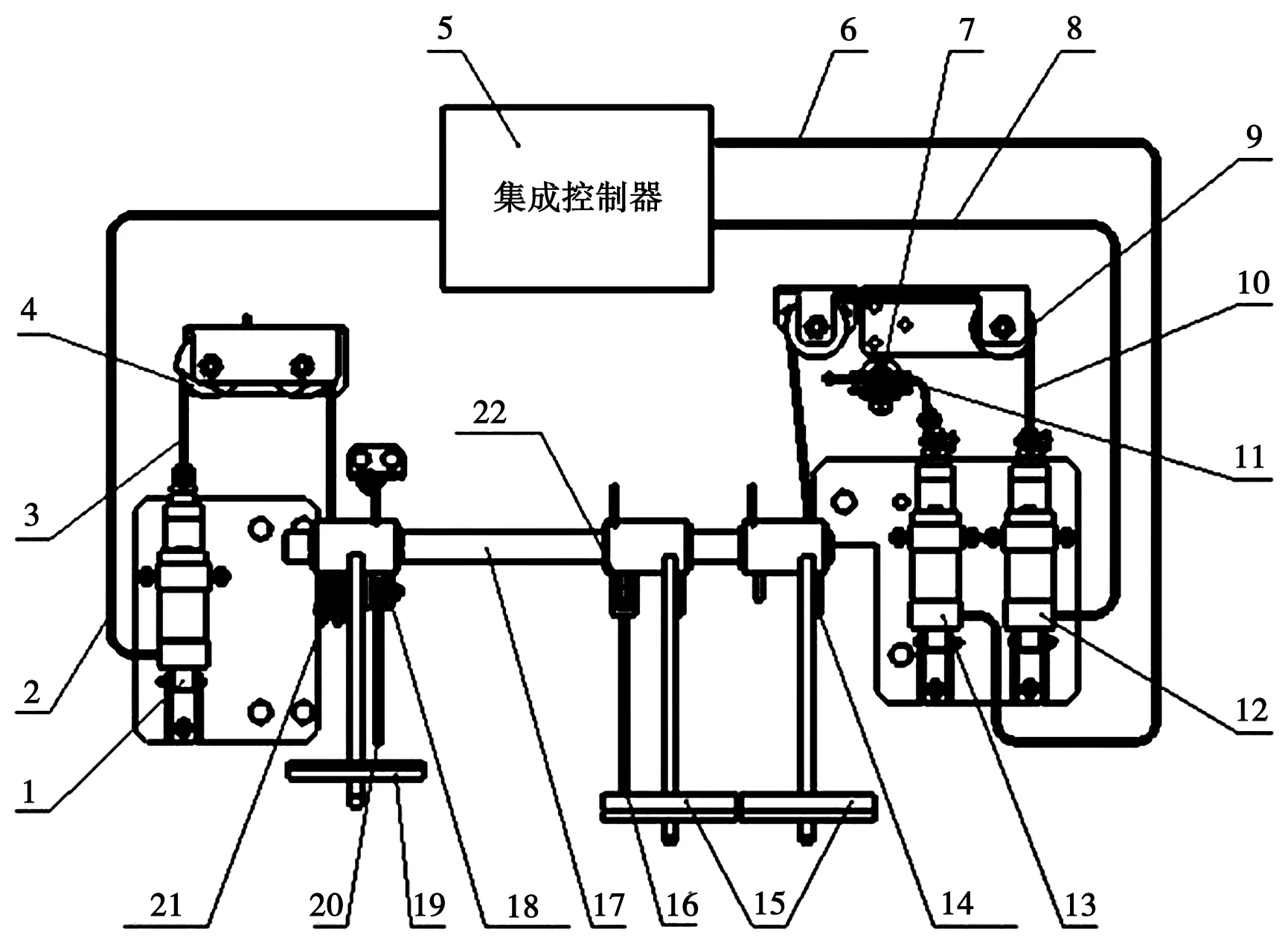
1.离合电动推杆;2.离合控制信号线;3.离合拉线;4.离合拉线滑轮;5.集成控制器;6.油门控制信号线;7.油门拉线滑轮;8.制动控制信号线;9.制动拉线滑轮;10.制动拉线;11.油门拉线;12.制动电动推杆;13.油门电动推杆;14.制动拉线支座;15.制动踏板;16.制动拉杆;17.支承轴;18.离合软轴支座;19.离合踏板;20.离合控制软轴;21.离合拉线支座;22.制动拉杆支座
该方案中执行机构采用带有霍尔编码器的电动推杆,通过连杆机构和拉线实现离合、制动与油门的自动控制。电动推杆内置霍尔编码器,能够精准控制其位移行程,可以使受控车辆控制达到定量控制,特别是车辆在启动时,能够缓慢平稳起步。
当进入手动操纵状态时,集成控制器断电,离合、制动和油门电动推杆完全释放,所有推杆全部伸出,车辆控制状态切换为手动操作。集成控制器上电,车辆控制状态切换为无人驾驶控制状态,离合、制动和油门推杆电机进行上电复位自检,完成复位自检后,电动推杆的初始状态信息进入集成控制器。
离合进行自动控制时,集成控制器下发指令给离合电动推杆,接到控制信号的离合电动推杆进行伸缩,伸缩的电动推杆带动连接在其上的离合拉线进行移动,离合拉线的另一端通过滑轮连接到离合踏板的支座上,离合拉线带动离合踏板绕着支承轴转动,转动的离合踏板带动其上的支座转动,随之带动固定在其上的离合控制软轴控制变速箱体中离合器的断开与啮合。
制动进行自动控制时,集成控制器下发指令给制动电动推杆,接到控制信号的制动电动推杆进行伸缩,伸缩的电动推杆带动连接在其上的制动拉线进行移动,制动拉线的另一端通过滑轮连接到制动踏板的支座上,制动拉线带动制动踏板绕着支承轴转动,转动的制动踏板带动其上的支座转动,随之带动固定在其上的制动拉杆控制制动器的打开与关闭。
油门进行自动控制时,集成控制器下发指令给油门电动推杆,接到控制信号的油门电动推杆进行伸缩,伸缩的电动推杆带动连接在其上的油门拉线进行移动,油门拉线的另一端通过滑轮连接到发动机本体油门控制端口,通过电动推杆的伸缩带动油门拉线移动,移动的拉线控制发动机油门的增减,完成油门的自动控制。
该技术方案与控制机构原理既可以实现手动操纵,也可以实现远程自动控制;由于采用带有内置编码器的电动推杆,既实现了高精度控制,又实现了闭环反馈控制。利用上述行驶系统的控制方案与技术路线,完成了农机远程自动点火、熄火、转向、车速、启停、制动的自动控制,实现了农机行驶系统的无人驾驶控制。
2.2 功能系统
2.2.1 感知系统
无人驾驶系统通过各种传感器、激光雷达、相机、超声波雷达、毫米波雷达进行图像信息的采集,采集的数据通过域控制器或者工控机进行融合计算,对识别到的图像数据甄别分类,实现农作物长势、机耕道信息,农机周围环境的感知和农机作业状态的实时控制。
2.2.2 规划系统
依据无人驾驶农机作业任务需求,其主要需求和任务完成的技术指标有多机作业任务、多机协同作业、农田中多个农机之间互相配合的规划路径。不同的作业场景涉及不同的路径规划,主要场景为农田作业的耕、种、管、收四个环节。为确保农机无人驾驶作业的安全性,需要在路径规划中引入电子围栏,规避由于信号和作业过程中特殊情况而引起的车辆失控风险。
农业场景中常采用的作业路径有鱼尾转弯掉头、梨形转弯掉头、套圈的规划路径,无人驾驶农机在农田中按照规划好的路径完成作业需求。
2.2.3 作业系统
依据上述行驶系统的控制技术路线与方案,农机功能系统的远程控制同样采用集成控制器、电动推杆执行机构、电液阀、执行液压油缸、角度传感器、压力传感器、非接触式接近开关等完成各项功能的远程自动控制、在线实时监测和闭环控制信息的反馈。
3 结论
通过农机无人驾驶自动控制系统的开发与应用,可以实现农机耕、种、管、收作业过程中的无人操控,提高农机的标准化作业水平,延长使用寿命,提高工作效率,缩短农作物各环节的作业时间,不仅提高了农作物的产量,而且降低了农作物的自然损失,同时避免人工作业过程中由于抢收而长时间疲劳驾驶导致的不当操纵引起对农机本体的损伤和人身的伤害。无人驾驶系统在农机上的应用,不仅推动了智慧农业的发展,同时也加速了大规模甚至超大规模无人农场的建设与发展,推动了农业现代化的发展进程。
(04)