机器人低位直肠癌前切除手术的要点和经验
2022-01-05马晓龙陈刚
马晓龙,陈刚
1 概况
手术机器人在国内正逐渐普及,很多地级市医院都已装机,大型三级医院已装机两台或更多的亦不在少数。随着国产手术机器人投放临床以及新一代产品的研发,可以预见,今后数年内国内医院手术机器人装机量及手术量均将呈现爆发式增长。手术机器人是裸眼3D视野,影像平台能提供放大10~15倍的高清三维图像,赋予手术视野更真实的纵深感;术者无须站立,不用扶镜手配合,操作更加舒适自如;其器械臂可540°旋转,腕关节有7个自由度,能做出人手无法完成的动作,特别适合在狭小的空间进行精细的操作;系统能过滤掉术者手部的震颤,让操作更加稳定[1]。未来5~10年机器人必将替代腹腔镜成为直肠外科的主流手术方式。
手术机器人非常有利于神经的保护;非常有利于筋膜层面的解剖,非常有利于盆底和括约肌间沟的分离[2]。掌握腹腔镜技术对于开展机器人手术大有裨益,但并非必须。开放手术的经验才是不可或缺的基础。机器人手术并非高不可攀的技术,万事开头难,对外科医生而言,第1台机器人手术的意义超过之后99台的总和。
2 机器人低位直肠癌前切除手术的要点和经验
2.1 体位与布孔[3]取剪刀位或改良截石位,头低脚高,右侧倾斜。适当降低患者左腿高度以避免与器械臂碰撞。镜孔C在中线偏右2~3 cm、脐上3~4 cm处,安放12 mm Trocar,建立气腹,气腹压8~15 mmHg。使用机器人镜头进行腹腔探查,若有影响Trocar安放的组织粘连,先用腹腔镜器械予以松解。调整体位,用腔镜肠钳将小肠尽量推移至右上腹,以能看到十二指肠水平部为准,充分显露手术野,安装器械臂。
Trocar孔以术野为中心,呈环抱式分布。包括:镜头孔C,器械臂操作孔R1、R2、R3(笔者常规用3号臂),辅助孔A。
1号臂操作孔R1(8 mm Trocar):置于右侧麦氏点;2号臂操作孔R2(8 mm Trocar):置于左锁骨中线,平镜头孔或稍偏头侧处;3号臂操作孔R3(8 mm Trocar):置于左髂上方、腋前线处。为避免和2号臂打架,R3与R2至少应旁开一拳的距离,上下位置可根据病灶所在进行调整;辅助孔A(12 mm Trocar):置于过R1的垂线或稍偏外侧处,与镜孔C和R1呈等边三角形(图1)。有些术者习惯于在耻骨上正中再加一个5 mm Trocar孔。Trocar孔位置均应在气腹建立后再确定;镜孔位置相对固定,其他Trocar孔可根据肿瘤位置、患者体形及术者习惯适当调整。

图1 达芬奇Si系统用于直肠癌根治术的Trocar布局
笔者采用从患者左腿外侧进机器(也有从两腿中间进的),中线与镜孔C和左髂前上棘的连线重合,器械臂呈“环抱”姿态:镜头臂居中,双侧器械臂关节向外伸展,臂上数字正对前方,避免交叉磕碰。器械臂与trocar连接后须适当调整位置以释放张力。
Xi系统既可采用与Si系统相同的布孔位置,也可采用其特有的布局:4个操作孔基本沿一直线排列,自左肋弓下缘与左锁骨中线交点至右髂前上棘;镜孔R2位于脐上方;其他操作孔水平间隔6~8 cm;R1距离肋缘及R4距离右髂前上棘应>2 cm;辅助孔A采用12 mm Trocar,多置于右锁骨中线外侧,与R3、R4呈等边三角形(图2)。镜孔R2位置相对固定,对于低位直肠癌等盆底操作为主的手术,操作孔连线可较为“水平”。对于高位乙状结肠癌等需要游离脾曲的手术,操作孔连线可较为“垂直”,必要时也可将操作孔整体向右平移;游离脾曲时,无需调整机器人位置,配合可旋转吊臂调整机械臂角度,将操作中心置于脾曲即可。

图2 达芬奇Xi系统用于直肠癌根治术的Trocar布局
2.2 直肠后间隙的分离 R3安放机器人专用肠钳,夹起直肠右侧系膜向腹侧、尾侧牵引;R2安放圆头双极电凝钳,R1安装电剪。助手经辅助孔置入腔镜肠钳,夹住小纱布卷,与R2圆头钳共同维持张力,以电剪打开乙状结肠系膜根部右侧的腹膜,分离直肠后间隙,保持直肠固有筋膜完整。注意不要错入骶前间隙,以免损伤腹下神经和盆神经。从右上向左下推进,打开直肠骶骨筋膜,进入肛提肌上间隙。特别要注意两侧的髂内静脉,一旦被电剪损伤,后果严重。
2.3 保留左结肠动脉的253组淋巴结清扫 用R3肠钳夹持游离开的乙状结肠系膜根部及直肠上动脉,向腹侧、尾侧牵引。清扫肠系膜下动脉和左结肠动脉夹角区的253组淋巴结。不宜过深,注意保护肠系膜下动脉根部两侧的上腹下丛。充分裸化肠系膜下动脉和左结肠动脉后,断扎直肠上动脉和乙状结肠动脉,保留左结肠动脉。充分裸化肠系膜下静脉,尽量靠头侧断扎。
2.4 Toldt间隙的分离 调整R3和R2位置,向外侧、头侧拓展Toldt间隙,注意辨认Gerota筋膜,保持Gerota筋膜和Toldt融合筋膜完整;注意保护左侧输尿管和生殖血管。离断直肠固有筋膜延续筋膜,与直肠后间隙贯通,完成中间入路分离。放置腔镜纱布后转向外侧入路。打开Monk白线,以留置的纱布为标志与中间入路贯通,先向头侧拓展,再转向尾侧。以R3肠钳夹持左侧腹膜反折处,与R2圆头钳和辅助肠钳共同维持三角牵拉,打开直肠左侧腹膜,至直肠左侧韧带。
2.5 盆底的分离 按照“先后方再前方,最后做两侧”的顺序游离直肠。于腹膜反折上方0.5~1.0 cm处打开腹膜,进入邓氏筋膜前间隙,显露精囊腺或阴道后穹窿,保留精囊腺被膜,保持邓氏筋膜完整;注意保护精囊腺或阴道后穹窿外上方的神经血管束(neurovascular bundles,NVB);悬吊子宫或膀胱以利操作,于精囊腺或阴道后穹窿下方0.5~1.0 cm处离断邓氏筋膜,进入直肠前间隙(邓氏筋膜后间隙);以直肠前、后间隙为指引,离断直肠左、右侧韧带,环周裸化直肠肠管;距离肛缘12 cm以内的直肠癌,应完整切除直肠系膜,故分离时两侧应至肛提肌裂孔的Hiatal韧带,后侧至肛尾韧带(直肠后方操作时可将30°镜朝上),再反向头侧裸化肠管;位置较高的直肠癌需要离断直肠系膜,直肠两侧裸化时采用从前上斜向后下的路径离断系膜较为有效。注意分离断扎左右两侧的直肠下血管(靠近盆底时有3支:左侧、右前、右后)。
2.6 离断直肠 用大号哈巴狗夹在肿瘤下方夹闭肠管,经肛门冲洗直肠后,以腔镜用切割闭合器离断直肠,切缘距离肿瘤下缘通常应>2 cm。离断直肠可以经辅助孔操作,此时术者可用左手的圆头钳和右手的针持(R1电剪换成针持)予以帮助;低位直肠也可下掉R1,右下腹穿刺孔安放12 mm Trocar后经此孔操作,此时离断直肠主要靠台上的助手一人完成,助手左手经辅助孔置入腔镜肠钳,牵引直肠,术者左手的圆头钳可予以辅助。
多数情况下一个钉仓不能完全离断直肠,因此第一次切闭时,钉仓应适当后撤,以保证两次切闭的交汇点在直肠残端的中间,吻合时能被打掉。第2次切闭时,要尽量让两次的闭合缘在一条线上,不要打成T字形的闭合缘,这样会增加瘘的风险[4]。
使用切割闭合器离断直肠,应将肠管完全含入仓口,千万不能将钉仓误插入肠管内(尤其在视野不佳的直肠后方);钉仓锁死后,尽量不要再松开调整位置;锁死后等待10~15 s再激发,手动的器械需要激发3~4次方能完成整个操作,两次激发之间均应等待10~15 s。
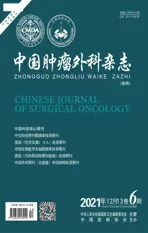
2.7 切除标本 撤机,取下腹正中5 cm切口,安放80 mm切口保护套,拖出肿瘤,离断近端系膜,距肿瘤上缘10 cm离断乙状结肠,移除标本;检查乙状结肠断端血供良好,评估吻合后没有张力,置入吻合器钉砧头,荷包结扎后修整“蘑菇头”,去除多余的系膜和脂肪垂,缝闭通向吻合区的血管;对拢缝合“蘑菇头”系膜缘两侧的浆膜,以免吻合时此处受机械力量压榨而至浆肌层外溢(图3);还纳近端肠管,双层手套封闭切口保护套,重建气腹,二次装机,R1安放机器人专用针持。
3A:荷包结扎后修整“蘑菇头”;3B:对拢缝合“蘑菇头”系膜缘两侧的浆膜;3C:避免吻合时此处受机械力量压榨而至浆肌层外溢 图3 吻合口近端肠管处理细节
2.8 吻合与“直肠端角及危险三角吊角缝合技术” 操作至此,笔者采用一项独创技术即“直肠端角及危险三角吊角缝合技术”,基本可以规避低位直肠吻合口瘘,亦无须做保护性造口。低位直肠的吻合口瘘,轻者引起局限性的腹盆腔感染,重者需要手术干预,清理腹腔并做造口改道,不仅增加了住院时间和费用,也极大增加了患者的痛苦,同时医生也将为此承受巨大的压力。低位直肠吻合口瘘的发生率,国外报道10%~20%不等,国内在6%~8%[5-7]。有些国家和地区甚至常规要做保护性造口,以期减少吻合口瘘的发生,或降低其并发症的严重程度。
外科医生一直在探索规避低位直肠吻合口瘘的方法。低位直肠手术之所以容易发生吻合口瘘,是由其吻合方式决定的。低位直肠的吻合,既不是端端吻合,也不是端侧吻合,更不是侧侧吻合,而是一种“双吻合(double stapling technique,DST)”,即在直肠残端闭合缘的基础上进行的吻合。这种吻合方式存在天然的缺陷,即直肠残端两侧的端角,所谓的“猫耳朵”或“狗耳朵”,以及吻合口与直肠残端闭合缘的交汇点,也就是“危险三角”[8]。这是因为直肠端角是外翻式闭合,吻合口瘘的概率显著高于内翻式吻合;“危险三角”处是缝钉摞缝钉,难免造成吻合钉成型不良,吻合时间合缘缝钉如未被完全切断,在退出吻合器时会导致撕拽,成为引发吻合口瘘的薄弱点(图4)。

图4 DST技术“猫耳朵”及危险三角形成的示意图
“吊角缝合”技术,是专为加强“猫耳朵”和“危险三角”而设计的,不需要进行整圈或半圈的吻合口加强缝合,操作简单易行。直肠离断后,在吻合前,先用两根4-0倒刺线将直肠残端的两个端角各连续缝合2~3针予以加强,每针适度收紧,注意针距与边距要均匀;缝线收紧的位置可以1针在侧面,1~2针在正面,保证端角的加强更为牢靠;缝合完毕后将倒刺线悬吊于两侧盆壁腹膜备用。这种方法比吻合后再行加强缝合要确切、容易得多,吻合时还能牵引两侧预留的倒刺线帮助暴露。
冲洗直肠残端,经肛置入吻合器,在机器人手术系统下完成吻合。吻合应保证没有张力;注意检查近端乙状结肠的方向,切勿成圈扭转。吻合时将系膜缘朝右,肠管朝左摆放较为平顺。吻合器中心杆在靠近直肠残端交汇角的部位顶出,以保证将其打掉。整个过程应小心轻柔,以免损伤甚至撕裂直肠残端。能看清圆形的吻合面后再对合钉砧头。旋紧钉砧头,至橙色游标进入指示窗的后1/3位置,旋紧钉砧头时吻合器枪身应稍稍后撤,以免过分撑顶直肠残端而至吻合口狭窄;打开保险,激发,完成吻合;吻合后将尾部旋钮反向旋转3/4圈(270°),松开钉砧头(吻合后钉砧头与枪身之间是真空状态,松开过度会吸入肠管,难以取出);将整个吻合器顺时针、逆时针各旋转90°,轻柔地从肛门退出。特别要注意3个停顿,即旋紧钉砧头后、握紧扳手激发后、松开激发扳手后,应各停顿10~15 s,以保证吻合的质量。最后检查两个吻合圈是否完整。
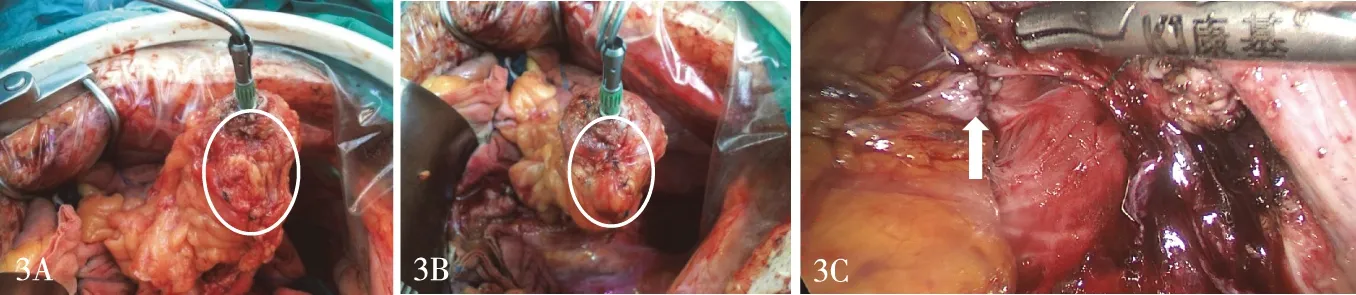
吻合完毕后,牵出预留的右侧直肠端角倒刺线,继续连续缝合,加强直肠右侧端角的闭合缘,再用倒刺线继续连续缝合加强右侧的“危险三角”也就是吻合口和闭合缘交汇的右侧这个点,“危险三角”区缝合2~3针即可,每针还是适度收紧,针距和边距要均匀;可适当带一点吻合口旁边的脂肪组织使加强更加牢靠;牵出预留的左侧直肠端角倒刺线,同样方法加强直肠左侧端角的闭合缘和左侧的“危险三角”。左侧端角往往偏后方,操作较右侧困难。助手可用肠钳牵引近端肠管帮助暴露。如果不能施行垂直于闭合缘和吻合口的连续缝合,也可采用水平褥式连续缝合加强(图5);如果位置特别低,端角和危险三角难以加强时,可以用预留的倒刺线将直肠端角缝合悬吊于近端乙状结肠系膜或脂肪垂上,缝1~2针,收紧倒刺线,用系膜或脂肪垂填塞、覆盖端角和危险三角区域。
机器人手术最大的优势就是镜下的缝合非常容易,它的器械臂可以540°旋转,腕关节有7个自由度,能做出人手都不能做出的动作,同时机器人成像系统可以放大10~15倍,看得特别清楚,在机器人下完成直肠端角及危险三角吊角缝合是十分轻松的。
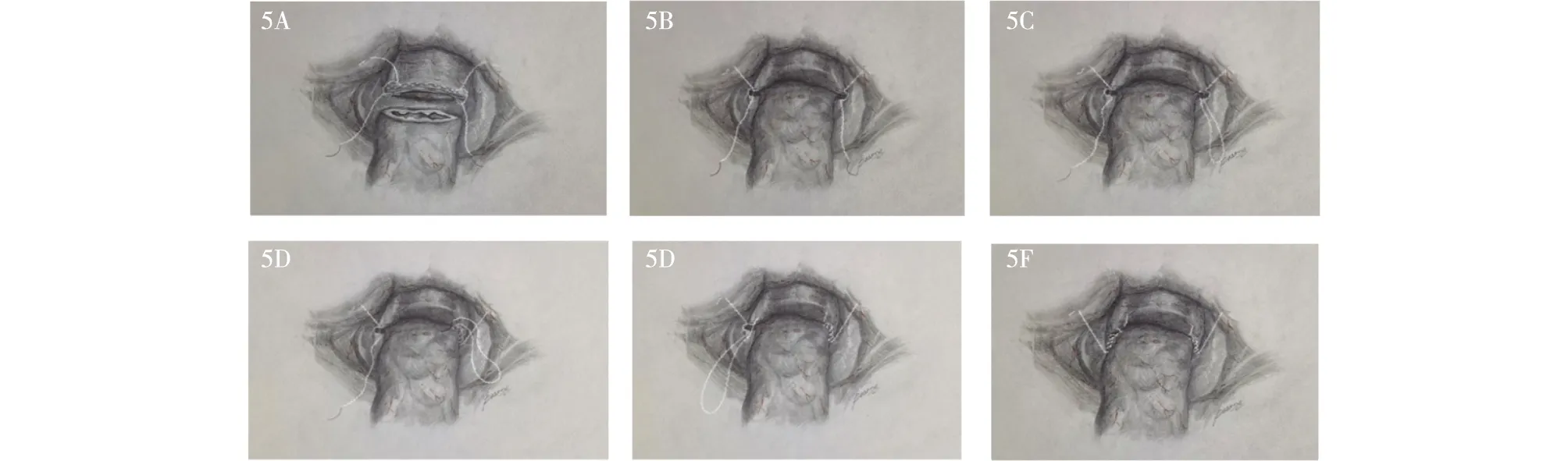
5A:吻合前,先用4-0的倒刺线缝合悬吊直肠残端的两个端角,每侧缝合2-3针收紧,将倒刺线悬挂于盒壁腹膜上备用;5B:牵引两侧倒刺线,充分显露术野,完成吻合;5C:牵引预留的倒刺线,连续加强缝合右前方的直肠端角,注意每针的针距均匀,边距适当,每针缝完后,适度收紧;5D:继续用倒刺线连续缝合,加强右侧的“危险三角”越过交汇点后,再缝合1-2针即可。每针缝完后,适度收紧;5E:牵引预留的倒刺线,连续加强缝合左后方的直肠端角,可让助手用平口钳牵引倒刺线以利暴露,每针缝完后,适度收紧;5F:继续用倒刺线连续缝合,加强左侧的“危险三角”越过交汇点后,再缝合1~2针即可。每针缝完后,适度收紧。图5 直肠端角及危险三角吊角缝合技术示意图
不论是在基层医院,还是肥胖、骨盆狭小、肿瘤位置非常低的患者,采用这项技术都能很方便地加强低位直肠吻合口。这项技术“一听就懂,一看就会,一用就灵,一试就信;能缝则缝,难缝则吊(将直肠端角悬吊于近端乙状结肠系膜或脂肪垂上并收紧,即便有小的渗漏,也能很快封堵);简单易学,普遍适用”;能减少低位直肠吻合口瘘的发生率。笔者一年完成近500例腹腔镜和机器人的结直肠肿瘤手术,其中一半左右是直肠手术,采用这项技术后,笔者不再做保护性造口,基本无吻合口瘘的发生。
机器人直肠手术术中不便变换体位,难以进行充气试验。可在吻合口处环绕干净纱条,从肛门注入美蓝或碘伏,检查吻合口有无渗漏;放置肛管,术野适当冲洗后放置引流,撤机,关闭切口和Trocar孔。
2.9 机器人手术中一些操作体会 ①熟练使用离合:两手的离合对机器人手术非常重要,可随时调整让手臂保持舒适的位置,也可调节器械的远近;②熟练使用电剪:电剪是最能体现机器人手术优势的器械,但也有相当大的风险,特别是在解剖重要血管时。使用电剪要做到眼疾手快、毫厘不差、蜻蜓点水、浅尝辄止。尽量不要用电剪大范围的划扫分离;解剖血管时多用挑的动作,剪断血管时不要带电能量;③器械失控应对:器械失控是由于手指脱离了操作环,器械因自身重量继续向前推动;若电剪等器械正对着重要的血管或器官,是非常危险的。此时应迅速将头抬起,器械的移动会立即锁死。然后套上指环控制住器械,再将头部贴近操控台继续手术;④器械臂失控和不灵活:可能是器械安装或更换时没有完全契合,可取下器械重新安装;或是Trocar脱出,应重新安放Trocar再连接器械臂;⑤器械臂无法到达目标区域:检查各器械臂之间是否有接触影响其活动,检查Trocar体外部分是否过长或已滑出体外;如果距离目标区域不太远,可以将Trocar连同器械臂一起往腹腔内再送入一些即可;⑥器械臂相互磕碰:台上助手适当调整器械臂的方向和角度,多数情况下可以解决;⑦紧急中转开放:大出血需紧急中转开放手术时,不用完全撤除机器人系统,仅需将器械臂移出开放手术区域即可。
3 结语
机器人手术在低位直肠癌手术中具有很大优势。在临床操作中应熟练掌握机器人操作技巧,合理布局Trocar,充分利用各器械臂,注重双吻合技术操作中的细节。吊角缝合技术可对吻合口区域的“猫耳朵”及“危险三角”进行加强,降低吻合口瘘的发生率,其操作简单实用,值得推广。