孤岛微电网频率μ-H∞鲁棒控制
2021-12-29吴丽珍丁安邦陈伟郝晓弘
吴丽珍,丁安邦,陈伟,3,郝晓弘,3
(1.兰州理工大学 电气工程与信息工程学院,兰州 730050; 2.甘肃省工业过程先进控制重点实验室,兰州 730050;3.兰州理工大学 国家级电气与控制工程实验教学中心,兰州 730050)
0 引 言
微电网(microgrid,MG)是将各种分布式电源(distributed generation,DG)、负荷、储能单元以及控制设备结合起来的可控独立系统,既可以与大电网并网运行,也可以孤岛运行,是分布式电源接入配电网的桥梁与纽带[1-3]。微电网由于自身容量小、惯性弱、出力不确定性强、频率调节能力和阻尼特性差等原因,使频率稳定问题日益凸显[4]。对于微电网频率稳定控制问题,国内外已开展许多相关研究。微电网主要有主从控制、对等控制和分层控制等三种控制方式[5]。传统下垂对等控制方式受线路阻抗影响难以实现有功和无功功率的精确分配,导致稳定状态下微电网频率偏离额定值。分层控制方法已成为微电网稳定控制的主要形式,频率二次控制得到深入研究。文献[6]提出了一种基于变步长自适应的分散协调控制方法,实现了直流母线电压和频率的零误差调节。但该方法未考虑多模式间切换及环流对分配精度的影响问题,并且控制器设计较为复杂。在文献[7]中,采用Hopfield模糊神经网络方法和粒子群优化(particle swarm optimization,PSO)与模糊逻辑相结合的方法来调节频率偏差,但该方法具有模糊性不能保证所设计控制器的控制精度。
微电网运行方式的改变,将导致网络等值参数和运行参数的变化,将引起微电网内控制对象参数摄动的问题,给系统频率控制带来困难。文献[8]通过考虑多目标约束问题,得到PID控制器优化参数,但无法解决对于系统中参数摄动的问题。鲁棒控制是一种实用性较强的现代控制方法,其中H∞控制理论是目前解决鲁棒控制问题中较优越的理论体系,已应用到了变流器的线性控制器中。文献[9]提出了一种分散鲁棒控制策略,为每个发电单元设计了鲁棒控制器。文献[10]设计出负荷频率H∞鲁棒控制器,并利用线性矩阵不等式方法来求解鲁棒控制器。在文献[11]中,为了提高在不确定性情况下的频率控制鲁棒性能,提出了基于混合H∞/H2和PSO的混合H∞/H2参数整定方法。文献[12]设计了一种H2/H∞控制器对柴油发电机进行有功功率调节,对风能和负荷的变化而引起的功率偏差进行补偿,达到了微电网频率控制的目的。文献[13]针对交直流混合微网提出了一种基于H∞混合灵敏度的交直流混合微网频率控制方法,解决了频率波动及控制对象参数摄动的问题。在文献[14]中针对孤岛微电网频率稳定性问题提出了一种基于μ综合的鲁棒控制器设计方法,但没有讨论不确定性建模对控制性能的影响。
上述文献的建模过程中,均没有考虑网络延时对微电网系统性能的影响。然而,网络化的微电网系统二次控制中,网络延时不可避免,将降低系统鲁棒性,甚至导致系统不稳定[15]。为此,文献[16]针对多区域互联微电网中的时滞负荷频率控制问题,设计了基于线性矩阵不等式方法的输出反馈鲁棒控制器。文献[17]则采用马尔可夫过程估计延时和数据包丢失,提出了基于粒子群优化算法的PI控制器,来保证负载频率稳定。但均未考虑系统结构不确定性问题。
本文在考虑微电网频率二次控制中网络通信延时、系统参数摄动以及结构不确定性的基础上,提出了一种基于μ-H∞综合的微电网系统频率控制方法。首先,将参数摄动与闭环控制通信延时作为非结构不确定性扰动整合到H∞控制中。其次,在设计的H∞控制器基础上考虑结构不确定性问题,结合D-K迭代法设计出μ-H∞控制器。最后,通过Matlab/Simulink仿真与dSPACE1007半实物仿真平台实验,验证了所提μ-H∞控制方法在参数摄动、通信延时和结构不确定的情况下系统有较好的鲁棒性能。
1 微电网系统动态建模
1.1 孤岛微电网结构
本文研究的孤岛交流微电网由风力系统(wind power,WP)、光伏系统(photovoltaic,PV)、柴油发电机(diesel engine generator,DEG)、微型涡轮(micro-turbine,MT)、燃料电池(fuel cell,FC)以及储能(battery energy storage,BES)、交流负载等组成,如图1所示。

图1 孤岛微电网结构Fig.1 Structure of isolated microgrid
有功功率的供需不平衡是导致微电网频率波动的主要原因,可通过平衡有功功率来减小频率的偏移。当孤岛交流微电网中风力、光伏发电输出功率不确定以及负荷的随机波动,导致系统功率不平衡,即式(1)左右不相等时,通过频率二次控制器对柴油发电机组、微型涡轮和燃料电池进行协调控制,进而控制微电网的功率平衡。
PLoad=PDEG+PMT+PFC+PWP+PPV±PBES。
(1)
式中:PLoad、PDEG、PMT、PFC、PWP、PPV、PBES分别为用户负荷、柴油发电机功率、微型燃气轮机功率、燃料电池功率、风力发电系统输出功率、光伏发电系统输出功率、储能输入/输出功率,其上下限表达式分别为
(2)
式中,左边变量为下限值,右边变量为上限值。
图2是微电网系统频率控制动态响应模型原理框图,其中:ΔPWP和ΔPPV分别是风力和光伏功率的变化量;D为阻尼系数;M是微电网频率响应的惯性系数,为不确定参数,作为输出乘性摄动施加于系统G(s),其模型参数如表1所示,其中Pini为初始功率,Pmax为最大功率,Pmin为最小功率,Pbase为微电网容量。

表1 模型参数Table 1 Model parameter

图2 微电网频率控制原理框图Fig.2 Block diagram of MG frequency control
实际用户负荷、风力发电系统、光伏发电系统功率预测会存在偏差,其中负荷偏差、风力发电输出功率偏差、光伏发电功率偏差[18]可表示为
(3)
功率偏差ΔP与频率偏差Δf的关系为
Δf=[1/(Ms+D)]ΔP。
(4)
1.2 微电网系统动态模型
微电网鲁棒控制中一种有效的模型表示方法是线性状态空间方程[19]。考虑通信延时的微电网状态空间模型为
(5)

(6)
(7)
当系统发生突变时,控制器迅速给出控制信号,控制微型涡轮,柴油发电机和燃料电池改变有功出力,维持微电网电压频率稳定。
2 微电网频率μ-H∞控制器设计
2.1 H∞与μ综合设计方法
H∞鲁棒控制标准框图如图3(a)所示,其中,w为外部输入信号(包括参考输入、扰动、噪声等),u为控制器输出信号;y为观测信号;z为性能输出信号;K(s)为控制器,G(s)代表广义被控对象。其中G(s)由式(8)表示,其传递函数Twz(s)表达为式(9)。

图3 控制标准框图Fig.3 Control standard configuration
(8)
Twz(s)=G11(s)+G12(s)K(s)(I-G22(s)K(s))-1G21(s)。
(9)
H∞控制问题实质上是求解一个控制K(s),使得在系统稳定的前提下满足‖Twz(s)‖∞≤1[20]。
图3(b)为μ综合标准框图。其中:P(s)为广义被控对象;K(s)为控制器;Δ为扰动块。图3(c)中,广义被控对象M(s)是由P(s)和K(s)共同组成的闭环系统。M(s)=Fu(P,Δ),由此将μ综合问题经转化为了H∞控制器设计问题。M(s)中包含不确定扰动模块Δ。Δ可用式(10)来表示。
Δ={diag[δ1Ir1,…,δkIrk,…,Δf],δi∈C,Δj∈Cki×kj}。
(10)
μ函数定义为
(11)
式中,σ为矩阵Δ的最大奇异值。稳定控制器K(s)应使得式(12)最小从而达到鲁棒性能。
(12)
式中,ω为系统角频率。
在求出的H∞控制器K(s)的基础上,结合μ综合中的D-K迭代法,使‖Twz(s)‖∞=‖Fl(M(s),K(s))‖∞值达到最小,即可设计出μ-H∞控制器。
2.2 控制器设计
H∞鲁棒控制中动态参数摄动的不确定性为“非结构不确定性”[21]。混合灵敏度控制是鲁棒控制器的设计方法之一。在设计过程中,同时考虑了外部扰动和内部参数摄动,能够满足系统的鲁棒性能[22]。为此,首先将状态空间方程式(5)中的通信延时转化为系统的一个不确定块Δ(τ),然后采用乘性摄动进行不确定性建模,进而采用混合灵敏度控制方法设计出鲁棒控制器。
所设计的H∞鲁棒控制结构框图如图4所示。
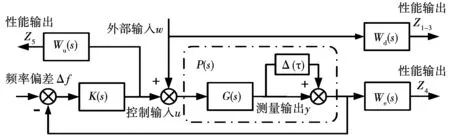
图4 H∞鲁棒控制结构框图Fig.4 Structure diagram of H∞ robust control
图4中:w,u,z{1-5},y分别是外部干扰输入,控制信号,期望性能信号和测量输出;We(s)、Wu(s)和Wd(s)为加权函数。若将闭环系统通信延时作为外部扰动集中到摄动模块Δ(τ)中,则考虑不确定性的系统P(s)=(I+Δ(τ))G(s)。
H∞鲁棒控制的目标是使系统输出对外部扰动和通信延时均不敏感,且当参数摄动时系统仍然保持稳定。在此,将系统灵敏度函数和互补灵敏度函数定义为

(13)
标准H∞控制问题是求解一个控制器K(s),使得在系统稳定的前提下满足式(14)。

(14)
由式(14)转化得
(15)
由式(15)可以看出,选择适当的加权函数We(s)、Wu(s)和Wd(s)可以改善系统的鲁棒稳定性和鲁棒性能,从而达到设计要求[23]。式(16)~式(18)为选定的加权函数。
(16)
Wd(s)=0.01I3×3,
(17)
(18)
μ-H∞控制器在考虑通信延时问题的同时,包含了不确定性系统P(s)的扰动不确定性,更好地满足了鲁棒性能要求,在H∞鲁棒控制基础上进一步提高了控制器的鲁棒性能[24]。
根据状态空间方程式(5),结合所设计的H∞控制器,可以得到μ-H∞控制结构框图如图5所示。

图5 μ-H∞控制结构框图Fig.5 Structure diagram of μ-H∞ control

D-K迭代法的思想是轮流令D或K最小化,同时使另一个保持不变。用D-K迭代法设计μ-H∞控制器的步骤为:
步骤1:确定D(s),根据min‖D(s)M(K)D-1(s)‖∞可以得到一个H∞控制器K(s)。

步骤3:将每个D(jω)带入后再重复迭代,直至‖D(s)M(K)D-1(s)‖∞<1或者无穷范数不再减小,则迭代结束。
3 仿真与实验结果分析
3.1 系统结构不确定情况下稳定性分析
本文考虑不确定参数M为具有±50%偏移,通过Matlab软件仿真分析50%M,100%M和150%M三种情况下系统动态响应能力,系统阶跃响应如图6所示。
从图6可以看出,系统调节时间短,超调量小,具有较强的动态响应能力,阶跃响应曲线都不发散,系统稳定。

图6 存在不确定性时的系统阶跃响应Fig.6 Step response of systems with uncertainties
系统频率响应特性如图7所示,表2是系统性能指标。从图7与表2可以看出在M存在±50%偏移的情况下,系统幅值裕度大于-40 dB,相角裕度大于50°,调节时间小,截止频率大。采用所设计的控制器,系统响应速度快,有较好的鲁棒性。

图7 存在不确定性时的系统波特图Fig.7 System Bode diagram with uncertainty

表2 性能指标Table 2 Statistic of performance indicators
3.2 具有延时情况下系统稳定性分析
在建立的H∞鲁棒控制器系统中,假设时间延迟分别为:τ=0.5 s,τ=0.8 s,τ=1.2 s,τ=1.5 s,相应的仿真结果如图8所示。
从图8中可以看出,当延迟时间τ=0.5 s,τ=0.8 s和τ=1.2 s时,系统仍然可以保持稳定。但随着延迟时间的增加,系统动态性能也随之变差。当延迟时间为τ=1.5 s时,系统输出最终变得发散不稳定。 由此可见,所提出的频率控制方法,在具有时延的情况下并不保守,仅在一定的通信延时范围内才能保证控制系统的稳定,并满足相应的控制指标。
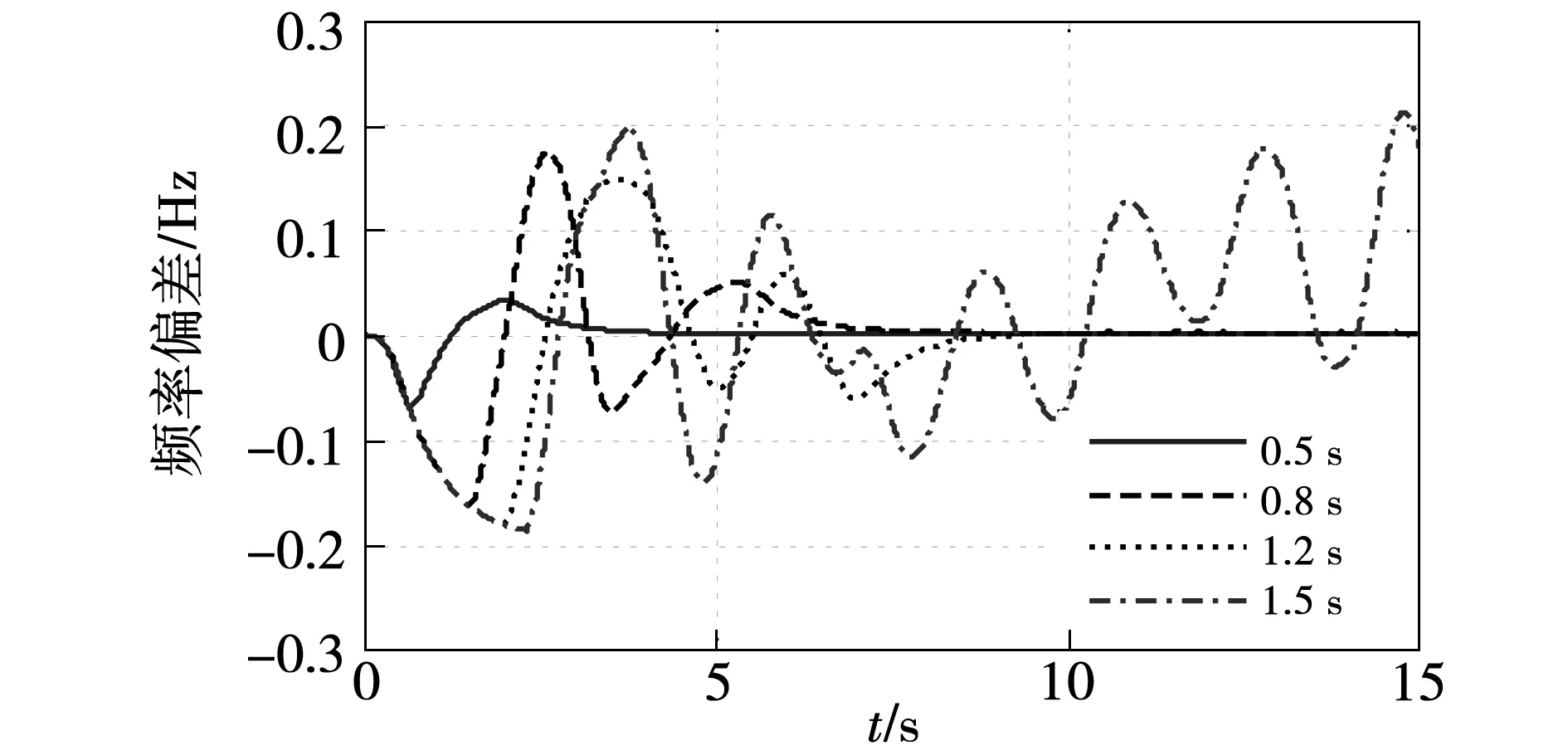
图8 具有延时情况下微电网频率阶跃响应Fig.8 Frequency step response of time delay
3.3 具有延时与参数摄动情况下稳定性分析
系统在风、光、荷功率发生突变(ΔPwind,ΔPPV和ΔPLoad)和参数摄动的情况下,考虑通信延时τ=0.5 s时,分别对系统采用μ-H∞控制、H∞控制以及PI控制方法进行仿真比较,分析系统动态响应及频率波动情况。
为了验证所提的控制方法能有效平抑间歇性电源出力和负荷的随机波动性等引起的频率偏差,设置了四种有功功率波动场景,分别是:场景1,风电输出功率PWP降低0.4 pu运行情况;场景2,光伏发电输出功率PPV下降0.45 pu运行情况;场景3,负载波动PLoad上升0.06 pu运行情况;场景4,PWP下降0.3 pu,PPV上升0.3 pu,PLoad下降0.5 pu运行情况。分别对比分析采用PI控制方法、H∞控制方法和μ-H∞控制方法,其仿真运行结果如图9所示。
从图9(a)~图9(d)中可以看出,间歇性电源(如风力发电、光伏发电)出力的不确定性和负荷的波动性均会使得微电网的频率产生偏差,造成系统频率不稳定。采用PI控制方法、H∞控制方法和μ-H∞控制方法均能使系统频率逐渐稳定。但是采用PI控制方法,系统稳定时间达12 s,系统动态响应时间长,超调量较大。采用H∞控制方法,系统能在8 s内达到稳定;而采用μ-H∞控制方法频率波动较小,系统在6s内就能达到稳定,相比于H∞控制方法,系统响应速度快,其超调量小。

图9 风光荷功率波动下微电网输出频率偏差Fig.9 Output frequency deviation of microgrid under wind,photovoltaic and load power fluctuation
综合分析4个情景下的频率偏差,所设计的μ-H∞控制器控制性能优于H∞控制器和传统PI控制器,减小了调节时间,提高了系统频率稳定性和动态性能。
为了进一步验证所设计控制器的稳定性,搭建了一套基于Matlab/Simulink仿真软件、dSPACE1007及其Control Desk的半实物仿真实验平台,实验参数与仿真参数一致。其中,风力系统、柴油发电机、微型涡轮、燃料电池等在dSPACE1007中建模,而光伏发电则为2台5 kW的光伏并网逆变器并联组网系统,储能采用30 kW磷酸铁锂电池。为实验研究的方便,设定系统存在网络延时有上界为:τmax=1.2 s。
图10为所设计的H∞和μ-H∞控制器在系统存在风、光、荷功率波动,且存在网络延时的情况下,系统频率波动情况实验结果。

图10 考虑延时及功率波动情况微电网频率偏差(实验)Fig.10 Frequency deviation of microgrid considering time delay and power fluctuation (Experiment)
从图10中可以看出,采用H∞和μ-H∞控制方法均能使系统在较短的时间内达到稳定,频率恢复到额定频率值。但是两者相比较,采用μ-H∞控制方法,系统响应速度快,动态性能较好,这与仿真结果基本吻合。而采用PI控制方法,系统无法使频率恢复到额定频率值,存在偏差,主要原因微电网二次频率控制中,采用PI控制器无法解决通信延时对系统性能的影响。
4 结 论
为了解决孤岛交流微电网中风力、光伏发电的输出功率以及负荷的间歇性与波动性所引起的频率波动问题,本文提出了一种基于μ-H∞综合的微电网频率控制方法。通过考虑微电网中参数摄动、结构不确定性与通信延时问题,建立了考虑通信延时的微电网频率控制状态空间模型,将H∞与μ综合鲁棒控制方法应用到微电网频率控制中,所设计的控制器对一定范围内的通信延时能够保持系统频率稳定。最后,通过搭建Matlab/Simulink仿真与dSPACE1007半实物仿真平台,验证所提控制方法的有效性与可行性。仿真与实验结果表明,所提的μ-H∞控制方法在参数摄动、通信延时和结构不确定的情况下,系统有较好的动态性能,对微电网频率波动有很好的平抑作用,且对一定的通信延时具有较强的鲁棒性能。