一种异步电机全阶磁链观测器设计方法
2021-11-08贾国涛张炜权刘国庆
贾国涛, 张炜权, 刘国庆
一种异步电机全阶磁链观测器设计方法
贾国涛, 张炜权, 刘国庆
(中国船舶集团有限公司 第705研究所昆明分部, 云南 昆明, 650101)
随着新型水下电动混流泵发射动力技术的不断发展, 对高速电机驱动提出了新的要求。但传统全阶磁链观测器设计会引发系统极点产生正实部, 造成无速度传感器控制系统不能在低转速区域保持稳定, 促使装置启动失败。针对此, 文中提出一种新的异步电机全阶磁链观测器设计方法, 设计了一种基于全阶磁链观测器的误差反馈矩阵, 可同时保证观测器极点实部和估计转速传递函数的零点实部都小于零, 从而保证了观测器以及估计转速的稳定。实验验证了该方法的有效性。
异步电机; 全阶磁链观测器; 无速度传感器; 矢量控制; 转速估计
0 引言
但是无速度传感器矢量控制技术在电机低速(5 Hz)运行时, 存在不稳定区间, 该区间是由于观测器极点存在正实部所导致[1]。因此, 如何设计高鲁棒性和高稳定性的磁链观测器是无速度传感器矢量控制研究的关键问题。各国学者对多种观测器进行了研究: 文献[2]~文献[3]采用低通滤波器取代电压模型法中的纯积分环节, 从而对电机磁链进行观测, 当定子频率远大于低通滤波器的截止频率时, 此观测方法具有较好的精度; 文献[4]~文献[6]通过在同步旋转轴系下采用电压模型和电流模型分别作为模型参考自适应系统(model reference adaptive system, MRAS)的参考模型和可调模型, 算法计算量小; 文献[7]~文献[9]采用全阶磁链观测器方法, 选取定子电流和定子磁链作为状态变量, 观测出定子磁链以用于直接转矩控制。
但是以上观测器均在电机低速范围存在正实部极点, 即均存在低速不稳定区域。相比其他观测器, 全阶磁链观测器的低速不稳定区域最小[10], 文中利用全阶磁链观测器的误差反馈矩阵系数, 通过对观测器的极点和估计转速传递函数的零极点进行配置, 同时保证观测器极点实部和估计转速传递函数的零点实部都小于零, 使系统极点收敛, 以保证系统在低速区域的稳定性。
1 异步电机数学模型
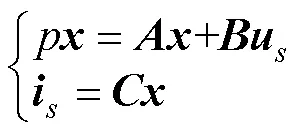
在同步旋转坐标下, 选择定子磁链和转子磁链作为状态变量, 异步电机的状态方程为
2 全阶磁链观测器设计
为解决异步电机无速度传感器系统在低速区域的不稳定性, 设计一种基于全阶磁链观测器的误差反馈矩阵, 该矩阵可同时保证观测器极点和转速估计开环传递函数零点具有负实部, 解决无速度传感器系统在低速区域的不稳定性。
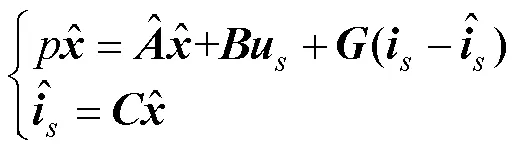
全阶磁链观测器方程
新时代背景下,国内市场经济持续快速发展,市场竞争不断加剧,各个企业在生产经营中所面临的风险也不断增加。同时,面对新的市场形势,不少企业仍然沿用传统财务会计管理模式,导致在实际运营过程中风险相对增多。而财务会计风险管理工作是企业日常管理工作的重要内容,对企业的长远发展有非常重要的影响。因此,各个企业必须加强优化自身的财务会计风险管理,以保证自身健康、顺利发展。
全阶磁链观测器系统框图如图1所示。图中, 转速估计自适应律可由李雅普诺夫稳定定律得到

通过对误差反馈矩阵的设计可以进行观测器极点配置, 以及估计转速传递函数的零极点配置, 控制系统收敛速度并保证系统稳定。
为了加快观测器的收敛速度, 在设计误差反馈矩阵时将观测器极点向左半平面平移, 使观测器的极点位置如图2所示[9]。
虽然图2中观测器的极点全部具有负实部, 即观测器是收敛的, 但如图3所示, 转速估计传递函数的部分零点具有正实部, 因此根据系统极点分布规律, 当转速估计传递函数中的增益大于一定条件后, 会导致转速估计传递函数具有正实部极点, 即转速估计是发散不稳定的。因此, 为了完全保证异步电机的稳定性, 需要满足条件: 观测器全部极点和转速估计开环传递函数的全部零点均具有负实部。

图2 传统观测器与电机极点分布

图3 传统转速估计开环传递函数零点分布
为满足该条件, 需要得到转速估计传递函数。由式(1)减去式(2)可得

由式(4)可得转速估计传递函数

由式(3)和式(5)可得转速估计传递函数框图如图4所示。为了完全保证异步电机的稳定性, 转速估计开环传递函数的全部零点均具有负实部。
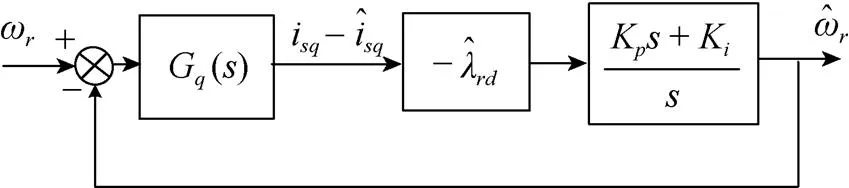
图4 转速估计传递函数框图
联合式(3)和式(5), 得到如图5所示劳斯-赫尔维兹稳定判据示意图。

图5 劳斯-赫尔维兹判据
由图5得估计转速传递函数具有正实部零点的充分条件为

由于同步转速ω既可以是正数也可以是负数, 为简化式(6), 令
1) 由=0知, 反馈矩阵系数1和2必须满足
2) 由条件>0可知, 为保证估计转速的稳定性, 反馈矩阵系数1必须满足
3) 由>0知, 反馈矩阵系数1和3须满足
由以上条件, 设计误差反馈矩阵参数如下
由式(11)可得观测器极点分布如图6所示, 转速估计开环传递函数零点如图7所示。

图6 新设计的观测器与电机极点分布
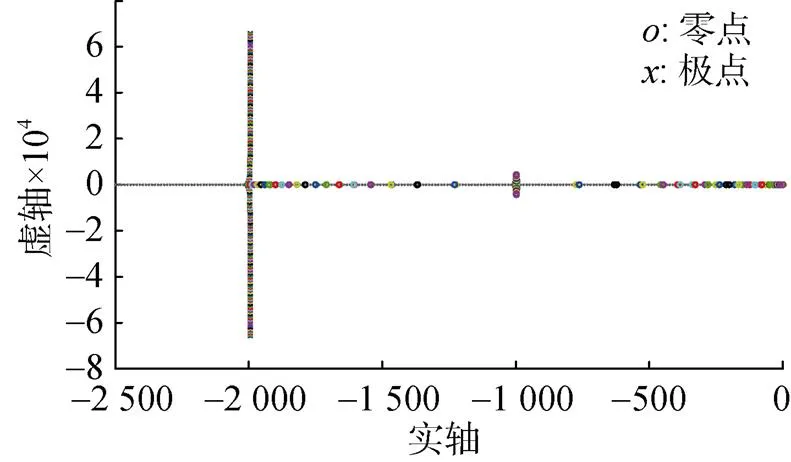
图7 新设计的转速估计开环传递函数零点分布
由图6和图7可知, 文中设计的误差反馈矩阵能够同时保证观测器极点和估计转速开环传递函数零点具有负实部, 即能够保证系统在所有转速范围下的稳定性。
3 实验验证
为了验证新设计误差反馈矩阵的有效性, 需要进行电机的极低速实验, 分别对改进前后的全阶磁链观测器稳定性进行对比, 实验平台采用7.5 kW异步电机对拖平台, 转速测量平台采用正余弦编码器, 编码器滤波时间常数为1 ms, 转速波形采样为1 ms/次。实验结果如图8和图9所示。实验所用被测电机参数如表1所示。
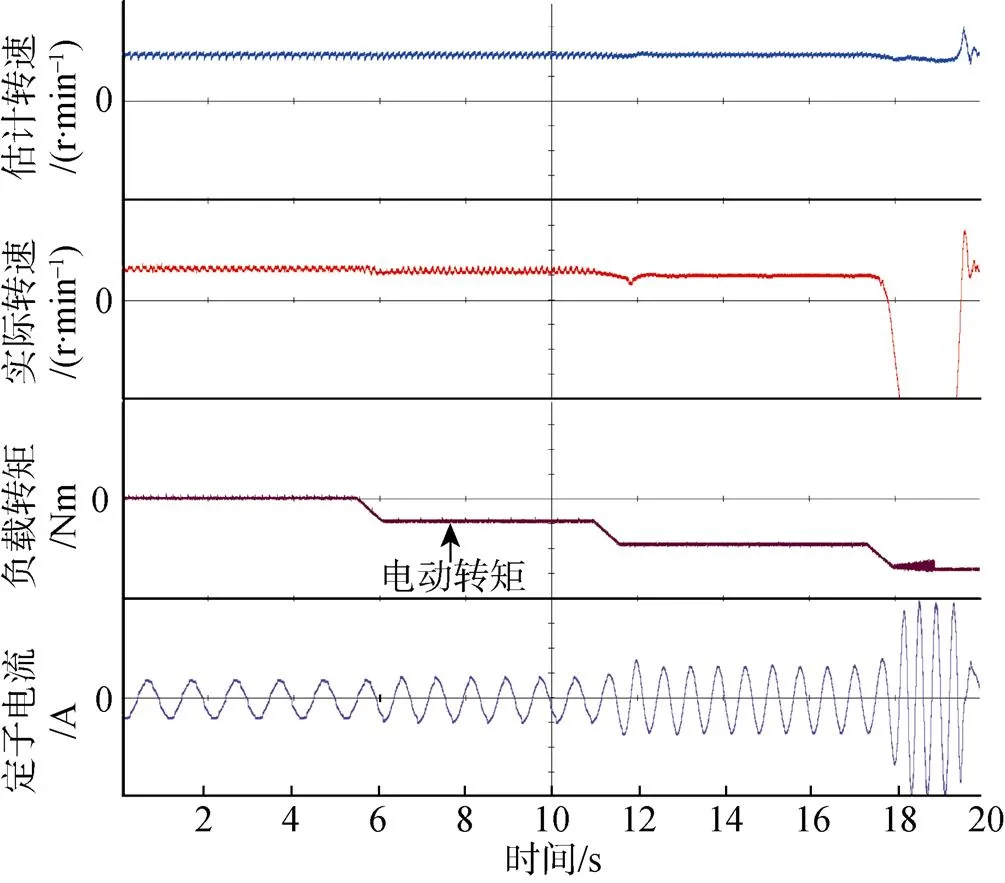
图8 传统全阶磁链观测器稳定性实验结果
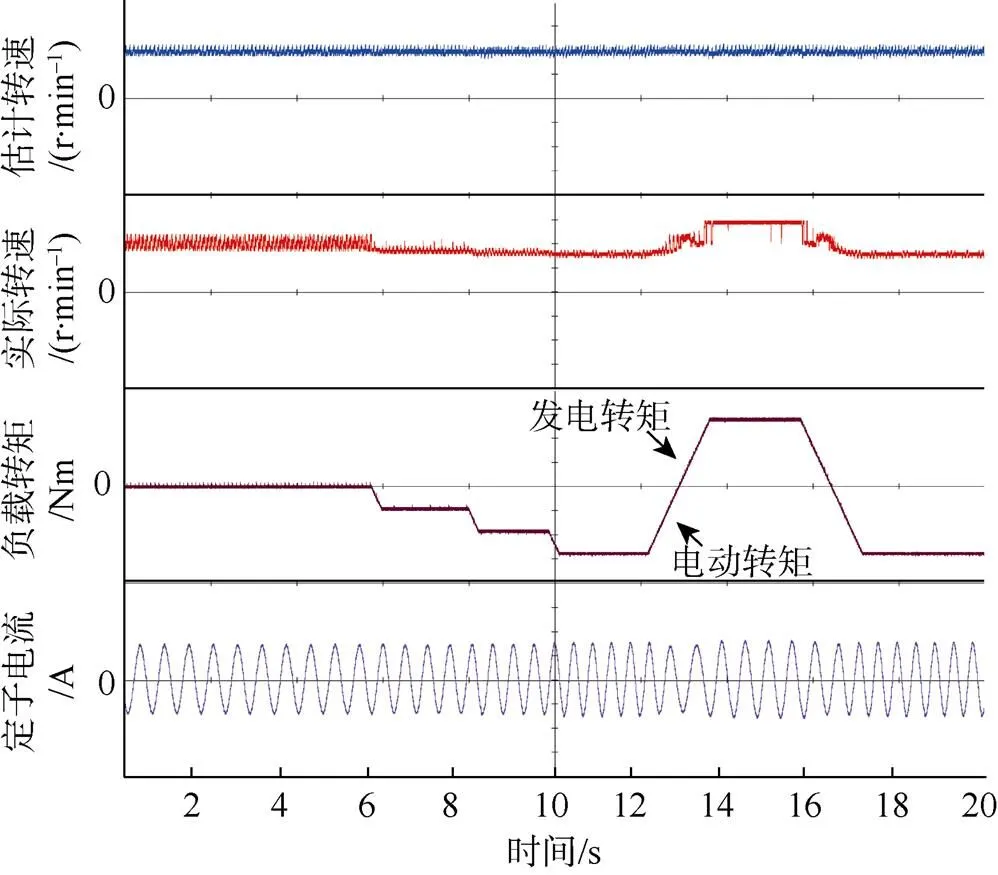
图9 基于误差反馈矩阵的全阶磁链观测器稳定性实验结果
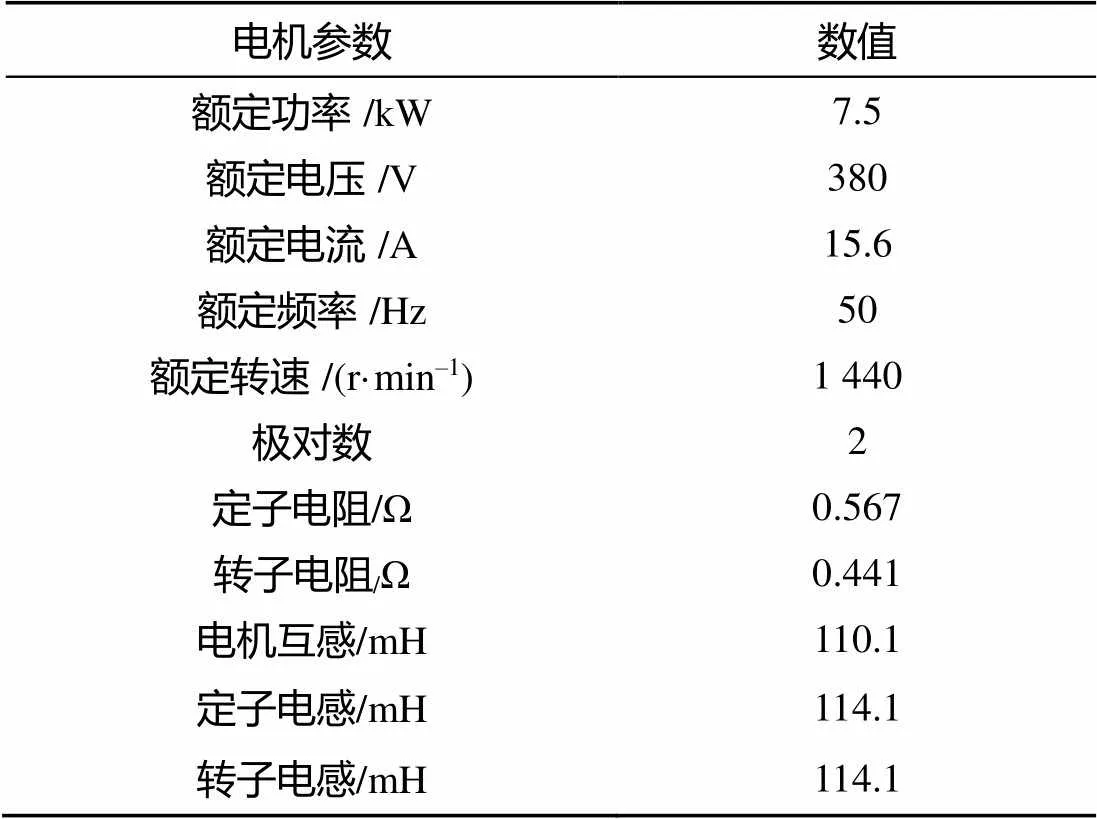
表1 被测电机参数
4 结束语
文中针对异步电机无速度传感器矢量控制系统具有低速不稳定性, 有可能造成装置启动失效的不足, 对传统全阶磁链观测器的不稳定问题进行分析, 提出一种新的异步电机全阶磁链观测器设计方法, 设计了一种基于全阶磁链观测器的误差反馈矩阵, 该方法可保证观测器和估计转速的稳定, 实验验证了该方法的可行性。
新型水下电动混流泵发射动力系统控制复杂且运行条件恶劣, 为了进一步提高系统运行的可靠性与鲁棒性, 在今后的研究中将针对电机参数的非线性特征设计参数在线辨识, 并结合实际动力系统验证控制方法的可靠性。
[1] Holtz J. Sensorless Control of Induction Machines—With or Without Signal Injection[J]. IEEE Trans. Industrial Electronics, 2006, 53(1): 7-30.
[2] Jansen P L, Lorenz R D. A Physically Insightful Approach to the Design and Accuracy Assessment of Flux Observers for Field Oriented Induction Machine Drives[C]//Industry Applications Society Meeting. Houston(USA). IEEE, 2002.
[3] Schauder C. Adaptive Speed Identification for Vector Control of Induction Motors without Rotational Transducers[J]. IEEE Trans. Industry Applications, 1992, 28(5): 1054-1061.
[4] Karanayil B, Rahman M F. An Implementation of a Pro grammable Cascaded Low Pass Filter for a Rotor Flux Synthesizer for an Induction Motor Drive[J]. IEEE Trans. Power Electronics, 2004, 19(2): 257-263.
[5] Maiti S, Chakraborty C. Model Reference Adaptive Controller Based Rotor Resistance and Speed Estimation Techniques for Vector Controlled Induction Motor Drive Utilizing Reactive Power[J]. IEEE Trans. Industrial Electronics, 2008, 55(2): 594-601.
[6] Cirrincione M, Pucci M. An MRAS Based Sensorless High Performance Induction Motor Drive with a Predictive Adaptive Model[J]. IEEE Trans. Industrial Electronics, 2005, 25(2): 532-551.
[7] Kubota H, Matsuse K, Nakano T. DSP-based Speed Adaptive Flux Observer of Induction Motor[J]. IEEE Trans. Industry Applications, 1993, 29(2): 344-348.
[8] Yang G, Chin T H. Adaptive Speed Identification Scheme for a Vector Controlled Speed Sensorless inverter Induction Motor Drive[J]. IEEE Trans. Industry Applications, 1993, 29(4): 820-825.
[9] Maes J, Melkebeek J. Speed Sensorless Direct Torque Control of Induction Motors Using an Adaptive Flux Observer[J]. IEEE Trans. Industrial Electronics, 2000, 36(3): 778-785.
[10] Ohyama K, Asher G M. Comparative Analysis of Experimental Performance and Stability of Sensorless[J]. IEEE Transactions on Industrial Electronics, 2006, 53(1): 178-186.
[11] Capolino G A. Induction Motor Drives[M]. New York: John Wiley & Sons, Inc., 1999.
New Design Method for an Asynchronous Motor Full-Order Flux Observer
JIAGuo-tao, ZHANG Wei-quan, LIU Guo-qing
(The 705 Research Institute, China State Shipbuilding Corporation Limited, Kunming 650101, China)
New technologies for electric underwater mixed-flow pump launch power are increasingly becoming an active research topic in the underwater attack and defense field, in which the reliability design of equipment is the key feature. However, the traditional design method of an asynchronous motor full-order flux observer leads to a positive real part of the poles of the system, resulting in a speed sensorless control system that is not stable in low-speed regions, and, thereby, in the failure of the start-up of the device. This study, therefore, proposes a new design method for an asynchronous motor full-order flux observer, which is designed based on a full-order flux observer while ensuring that the real part of the pole of the observer and the real part of the zero point of the estimated speed transfer function are less than zero. As a result, the stability of the observer is ensured while the speed is estimated. Finally, the effectiveness of the method is verified experimentally.
asynchronous motor; full-order flux observer; speed sensorless; vector control; speed estimation
贾国涛, 张炜权, 刘国庆. 一种异步电机全阶磁链观测器设计方法[J]. 水下无人系统学报, 2021, 29(5): 596-600.
TJ630; TM343
A
2096-3920(2021)05-0596-05
10.11993/j.issn.2096-3920.2021.05.012
2020-11-02;
2021-01-27.
张炜权(1981-), 男, 硕士, 高工, 主要研究方向为流体转动与控制.
(责任编辑: 杨力军)
