一种适用于水下距离徙动目标的稳健自适应检测算法
2021-11-08郝程鹏侯朝焕
宋 琼, 闫 晟, 郝程鹏, 侯朝焕
一种适用于水下距离徙动目标的稳健自适应检测算法
宋 琼1,2, 闫 晟1, 郝程鹏1, 侯朝焕1
(1.中国科学院 声学研究所, 北京, 100190; 2.中国科学院大学 电子电气与通信工程学院, 北京, 100049)
在水下目标自适应检测中, 目标的高速运动会引起距离徙动(RCM)现象, 从而导致检测性能下降。同时, 由于水下环境的复杂性, 还面临着辅助数据严重不足的问题。为解决以上问题, 文中提出一种新的自适应检测算法, 首先基于模型阶数选择方法, 将声呐回波信号表示为多个时域序列形式, 随后利用对称线阵协方差矩阵的斜对称结构对RCM目标的多元假设检验模型进行改进, 进一步提出基于斜对称广义信息准则自适应匹配滤波(PG-AMF) 检测算法。仿真结果显示, PG-AMF算法降低了对辅助数据的依赖, 能够较为准确地估计出RCM目标回波的分布情况, 进而取得良好的目标检测性能。
水下目标; 距离徙动; 自适应检测; 多元假设检验; 声呐
0 引言
水下目标检测技术[1]作为水声信号处理技术的一个重要领域, 是后续对目标进行跟踪、识别的基础。其主要任务是对声呐接收数据进行处理, 判断目标的有无, 并对一些目标参数进行估计。根据声呐工作方式不同可分为主动和被动检测技术, 其中主动检测技术通过主动声呐向特定方向发射声波并对回波信号进行处理来检测目标有无, 具有设计灵活、准确高效的优点[2]。
根据对接收数据处理方式的不同, 主动检测手段可分为2类[3]: 一类是在时频域或空域对接收信号滤波后进行能量检测, 如从空域角度处理的波束形成器[4], 从时频域角度处理的匹配滤波器[5]等; 另一类是从统计信号处理角度提出的自适应目标检测技术[7], 首先对检测问题中的接收数据进行分类, 构建目标与背景干扰模型, 随后依据不同的检验准则设计检验统计量。该技术采用与待检测单元(cell under test, CUT)相邻的辅助数据来估计背景干扰的功率水平, 通过算法设计来保证恒虚警率(constant false alarm rate, CFAR), 从而实现目标检测的自动化[8]。准确的背景干扰功率水平估计依赖于充足的辅助数据, 根据RMB准则[9], 为保证估计性能损失不超过3 dB, 辅助数据量应为系统维度的2倍以上, 但这一条件在实际应用中往往难以保证。为解决该问题, 许多基于先验知识的改进算法被提出, 所利用的先验知识包括干扰的功率谱对称特性[10]、干扰协方差矩阵的斜对称结构[11]以及干扰秩信息[12]等, 它们有效降低了对辅助数据的依赖性。
对于水下高速运动目标, 能量检测方法将面临时频域的失配问题, 需要对发射波形重新设计[13]来减小失配影响, 或对多普勒频移进行估计[14]后再进行匹配滤波等后续工作, 这些方法在取得一定效果的同时也提高了目标检测的复杂度。对于自适应目标检测算法, 目标的高速运动将引起距离徙动算法(range migration algorithm, RCM)现象, 即接收数据中目标回波长度及位置发生变化, 不再处于所划分的同一距离单元内, 导致CUT内的目标能量减少, 检测性能随之下降[15-16]。
在雷达信号处理领域, 对RCM现象的处理主要包括基于Hough变换[17-18]和Keystone变换[19-20]的相关算法。其中Hough变换主要思想是通过多维空间数据处理实现对CUT之外的信号能量加以利用, Keystone变换则试图通过数据坐标系的尺度变换来实现对距离徙动的补偿以减少能量损失。这些方法在声呐图像处理中也得到了一定的应用[21], 但是它们通常需要有充分的目标运动先验信息, 在实际应用中很可能难以获得。针对这一问题, Addabbo等[22]考虑了RCM现象对CUT内信号成分的影响, 把目标检测模型构建为多元假设检验形式, 结合模型阶数选择(mo- del order selection, MOS)方法[23]提出自适应检测算法。其优点是无需考虑目标运动的先验信息, 在提高目标检测概率的同时, 可估计出目标回波的位置分布情况, 从而给后续的目标定位、跟踪等任务提供了先验信息。
针对水下RCM目标检测问题, 文中首先参考水下空时模型[24], 将主动声呐单脉冲体制的目标回波表示为多个时域采样的形式, 建立针对水下RCM目标的多元假设检验模型, 随后结合干扰协方差矩阵的斜对称结构这一先验知识对模型进行改进, 然后利用MOS方法对该模型进行求解, 估计目标回波的分布情况, 提高对目标回波能量的积累效果, 最后提出了利用斜对称结构的稳健检测算法。仿真结果显示, 文中提出的斜对称广义信息准则自适应匹配滤波(persymmetric generalized information criterion adaptive matched filter, PG-AMF)算法相比不进行目标回波分布估计的广义匹配滤波(generalized AMF, GAMF)算法[25]具有3 dB以上的检测性能提升, 并在辅助样本数量不足的情况下表现出稳健的检测性能。
1 系统模型
由于声呐采用声波作为发射信号, 相较于雷达系统, 声波传播速度较慢, 接收时延较长, 无法满足多脉冲相干累积的条件。因此声呐通常采用单脉冲工作方式[1], 即在一个检测周期内发射一个脉冲信号。对于一个单脉冲声呐系统, 为准确得到RCM目标的回波分布, 参考水下空时模型的处理方式[24], 对接收数据进行连续采样, 并分为若干距离单元, 如图1所示。将采样得到的数据分为两部分: 一部分是CUT数据, 又称主数据, 其中包含背景干扰, 由噪声和混响组成, 并可能包含目标回波; 另一部分是辅助单元数据, 其中仅包含背景干扰, 并与CUT中的背景干扰独立同分布。
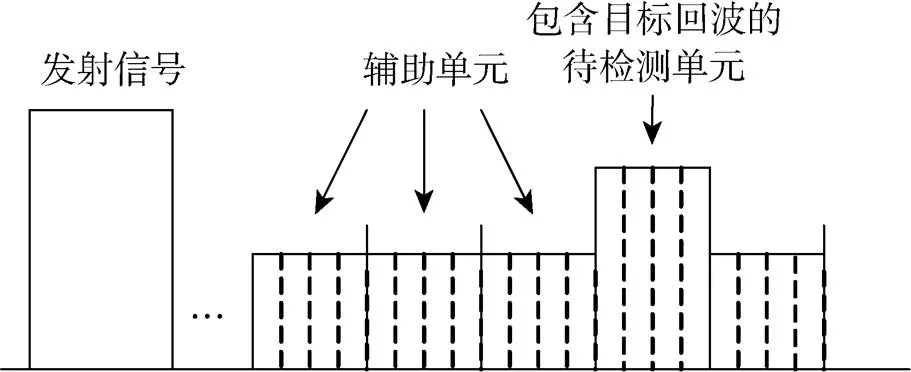
图1 接收数据采样示意图
设发射脉冲信号为


式中: 为包含信号幅度的系数; 为时域频率, 为多普勒频率, 为多普勒系数; 为信号压缩系数; 为空域频率, 为目标方位角。
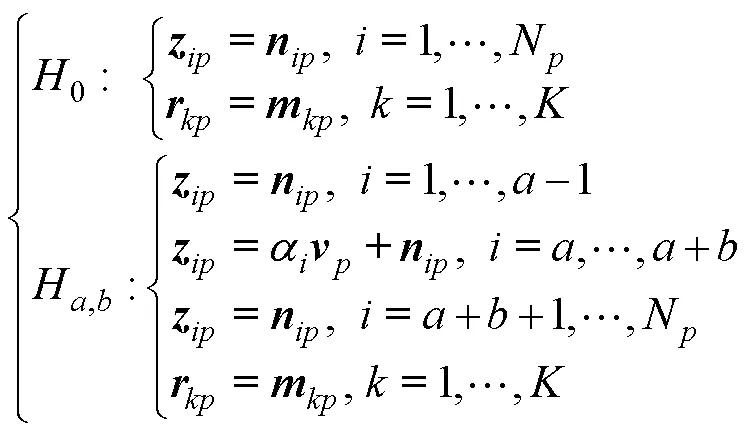
在水下空时模型中, 理想化地认为距离单元长度选取适当, CUT仅存在有目标回波和无目标回波2种情况。但RCM现象发生时, 目标的高速运动会导致回波长度及位置发生变化, CUT内的采样点可能出现的情况如图3所示, 其中蓝色色块代表包含目标回波的采样点。即RCM目标的回波不再总处于同一距离单元内, CUT内信噪比将会下降, 进而导致检测性能的下降。为解决该问题, 对接收信号建立多元假设检验模型[22], 如式(3)所示。
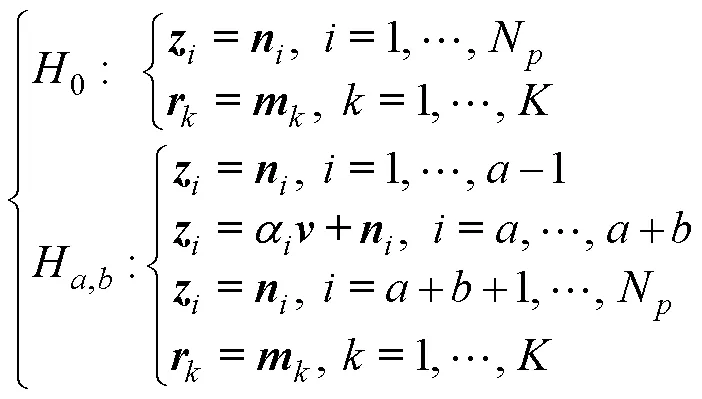
式中: 为主数据; 为CUT中的背景干扰, 服从零均值多元复高斯分布, 干扰协方差矩阵表示为; 为辅助数据; 为辅助单元中的背景干扰, 且与独立同分布, 记为; 表示第个采样点的幅度; 为包含目标回波的采样点序号, 定义集合为采样点的序号集, 则应满足, 且; 为CUT内采样点总数; 表示辅助数据个数, 为保证干扰协方差矩阵的非奇异性, 需满足。


利用辅助数据对干扰协方差矩阵进行估计, 估计值
而对于具有斜对称结构的干扰协方差矩阵, 可以进一步利用辅助数据中的信息, 得到更准确的估计值表达式

2 检测算法设计

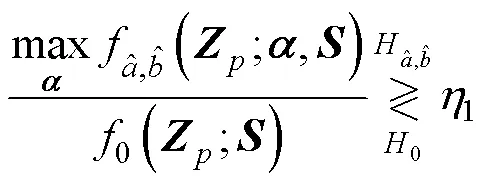
MOS方法是一种整数型参数[23]的估计方法, 这些整数型参数(如自回归滑动模型的阶数、阵列信号处理中的信源数等)决定了不同的模型维度。MOS方法引入数据拟合中常用的赤池信息量准则(akagami information criterion, AIC),广义信息准则(generalized information criterion, GIC)[22]等, 将参数估计问题转化为模型的选择问题, 并给出了统一的表达式如式(10)所示, 其中第1项为似然函数项, 考虑了模型与数据的似然程度, 第2项为罚函数项, 考虑了模型的复杂度, 根据不同的准则可以推导出不同的罚函数项。



则式(3)转化为
通过简单的数学推导可知式(15)与式(9)等价, 实现了对斜对称结构这一先验知识的利用。





文中的PG-AMF算法实现步骤如图4所示。

图4 算法步骤图
3 仿真结果与分析
RMSE计算公式为

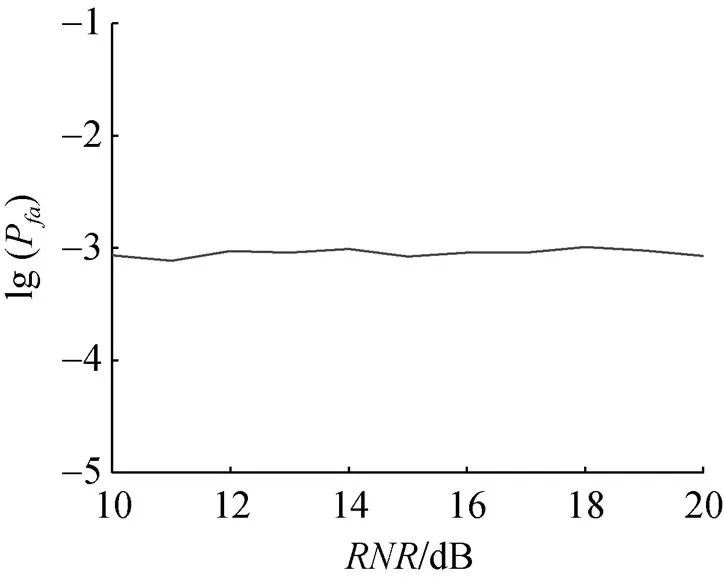
图5 PG-AMF的随RNR变化曲线
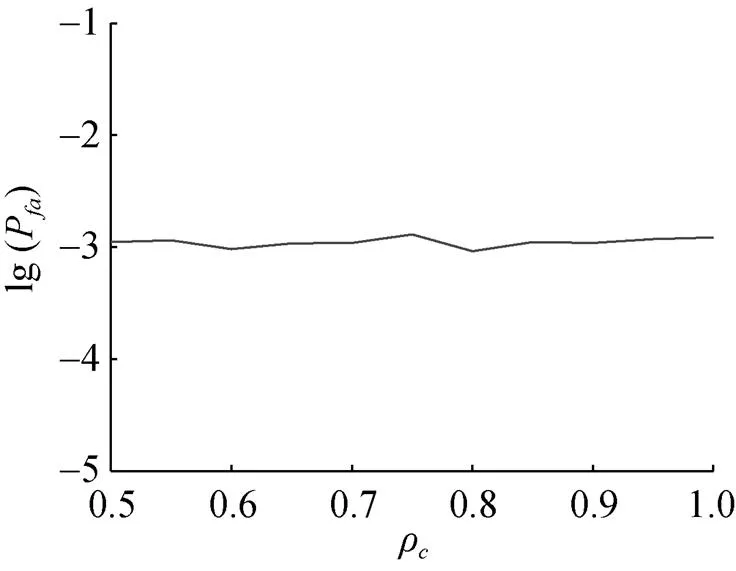
图6 PG-AMF的随变化曲线
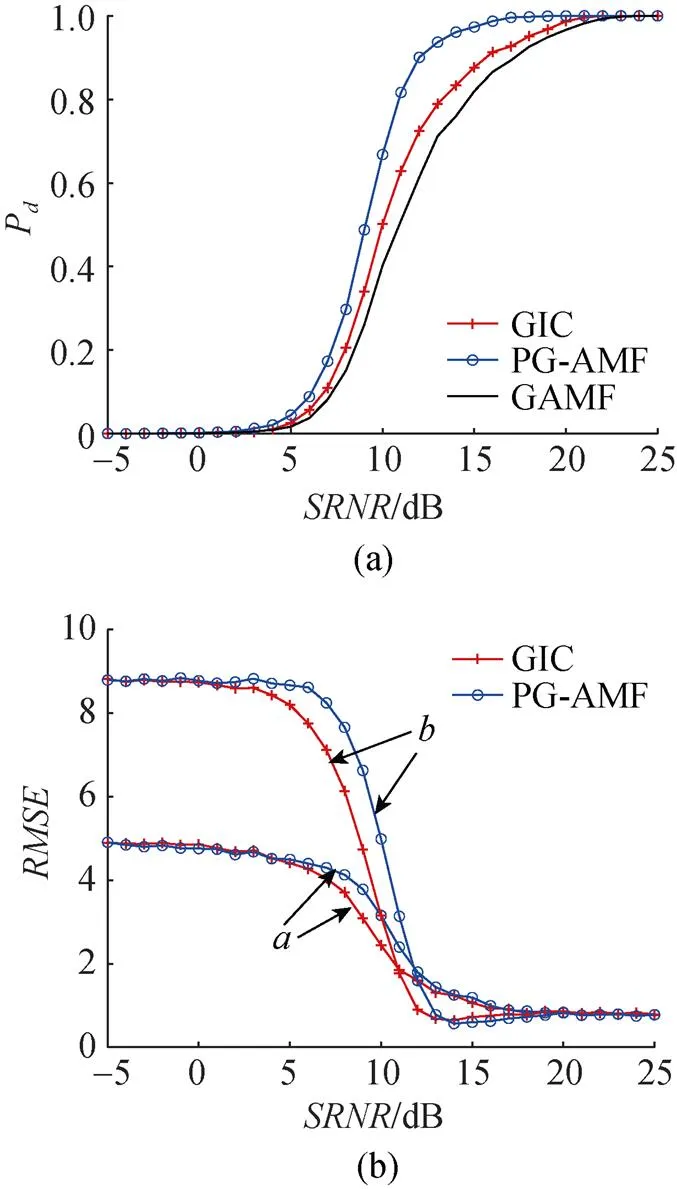
图7 K=20时各检测算法表现
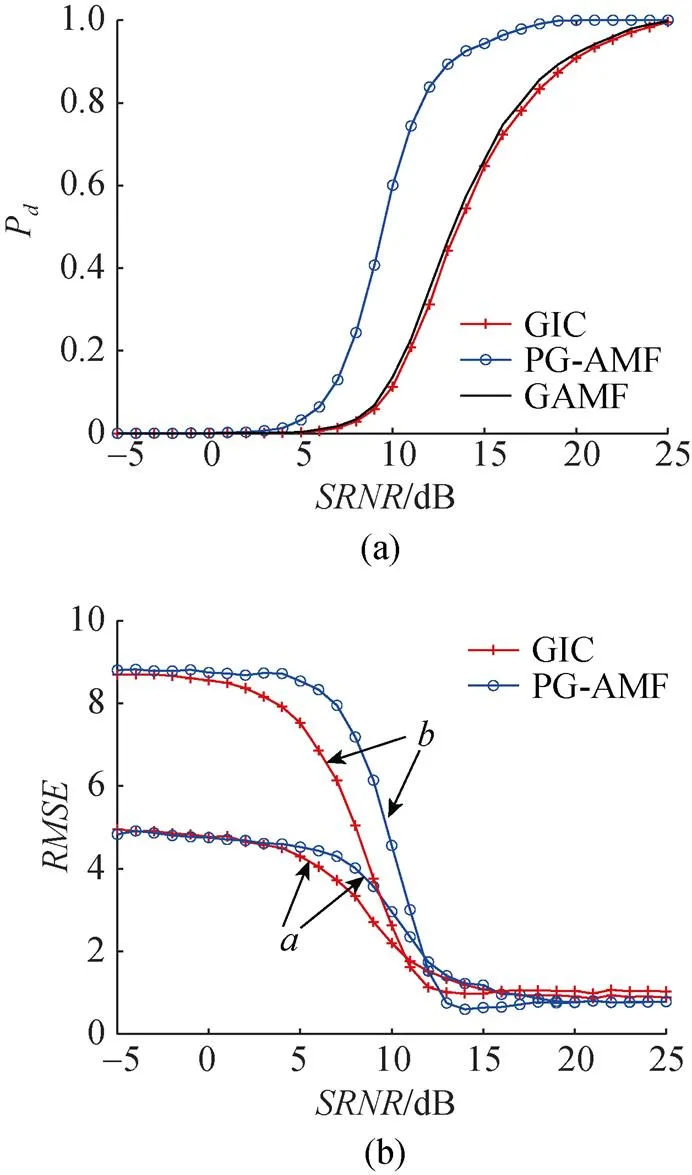
图8 K=16时各检测算法表现

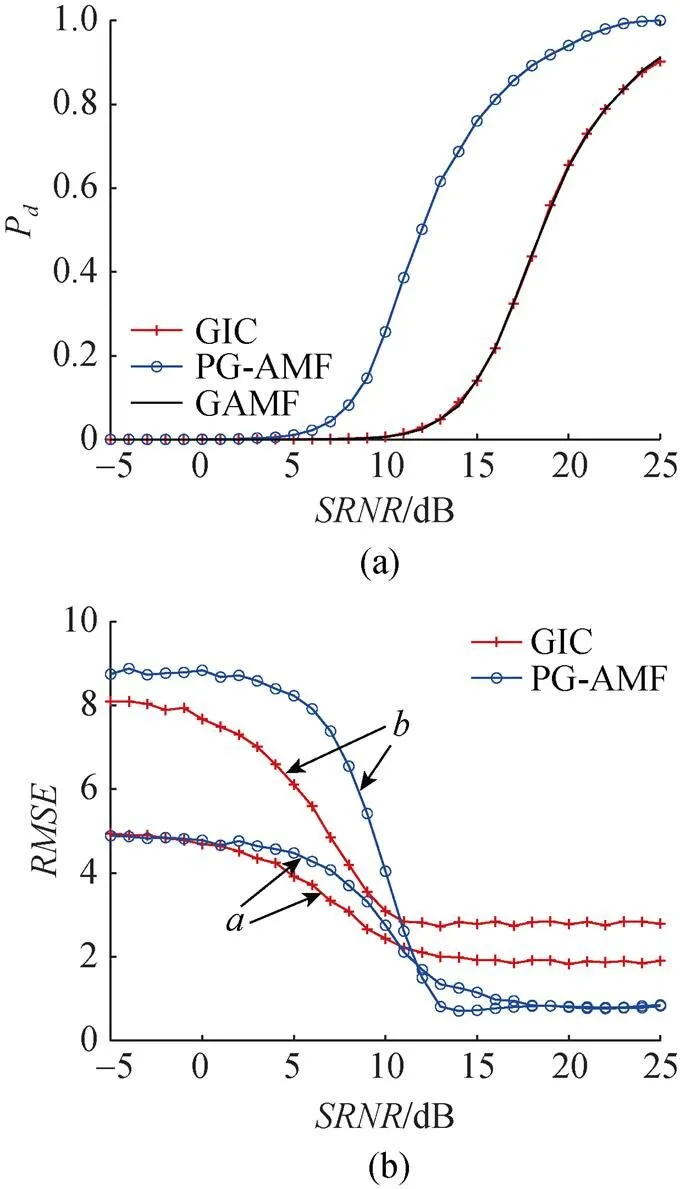
图9 K=12时各检测算法表现
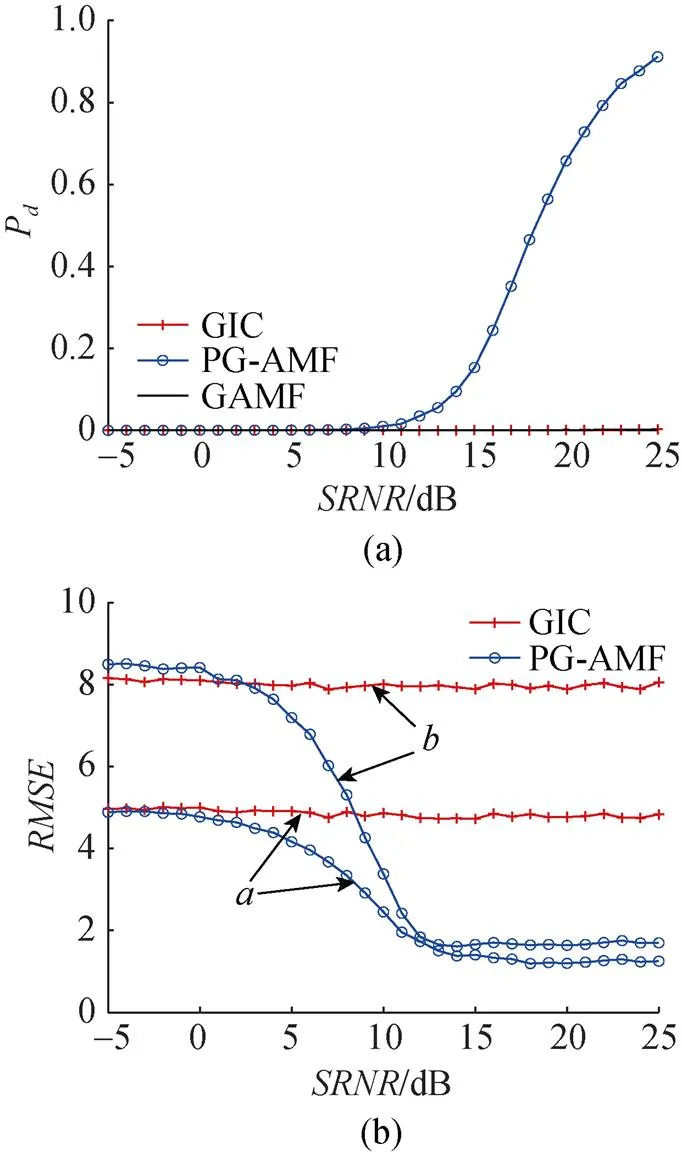
图10 K=8时各检测算法表现
4 结束语
针对水下目标高速运动引起的RCM现象,以及辅助数据量不足导致的检测性能下降问题, 文中利用干扰协方差矩阵的斜对称结构对RCM目标的多元假设检验模型进行改进, 提出一种新的水下目标自适应检测算法。仿真结果表明, 所提出的PG-AMF算法能够有效检测RCM目标, 比传统的GAMF算法有明显的性能提升, 与未考虑斜对称结构的GIC算法相比, 在辅助数据不足的场景下也具有更好的稳健性。
需要指出的是, 由于文中算法需要对多元假设的所有情况进行计算, 计算量比传统的自适应检测算法大, 因此在保证检测性能的同时降低计算量将是下一步的研究重点。
[1] 朱埜.主动声纳检测信息原理[M].北京: 科学出版社, 2014.
[2] 杨崇林, 姚蓝.水下高速小目标探测中的信号波形设计研究[J].声学学报, 2001(5): 389-394.
Yang Chong-lin, Yao Lan.Study on the Signal Waveform Design to Detect an Underwater High-speed Small Target[J].Acta Acustica, 2001(5): 389-394.
[3] 郝程鹏, 施博, 闫晟, 等.主动声纳混响抑制与目标检测技术[J].科技导报, 2017, 35(20): 102-108.
Hao Cheng-peng, Shi Bo, Yan Sheng, et al.Reverberation Suppression And Target Detection for Active Sonar[J].Science & Technology Review, 2017, 35(20): 102-108.
[4] Lønmo T I B, Austeng A, Hansen R E.Improving Swath Sonar Water Column Imagery and Bathymetry with Adaptive Beamforming[J].IEEE Journal of Oceanic Engin- eering, 2020, 45(4): 1552-1563.
[5] 陈鹏, 侯朝焕, 马晓川, 等.基于匹配滤波和离散分数阶傅里叶变换的水下动目标LFM回波联合检测[J].电子与信息学报, 2007(10): 2305-2308.
Chen Peng, Hou Chao-huan, Ma Xiao-chuan, et al.The Joint Detection to Underwater Moving Target’s LFM Echo Based on Matched Filter and Discrete Fractional Fourier Transform[J].Journal of Electronics& Information Techn- ology, 2007(10): 2305-2308.
[6] 王静, 黄建国.水下小孔径阵列自适应匹配滤波检测方法[J].电子与信息学报, 2011, 33(6): 1385-1389.
Wang Jing, Huang Jian-guo.Adaptive Matched Filter Detection Method on Underwater Small Aperture Array[J].Journal of Electronics& Information Technology, 2011, 33(6): 1385-1389.
[7] Farrell M D, Mersereau R M.On the Impact of Covariance Contamination for Adaptive Detection in Hyperspectral Imaging[J].IEEE Signal Processing Letters, 2005, 12(9): 649-652.
[8] 沈福民.自适应信号处理[M].西安: 西安电子科技大学出版社, 2001.
[9] Reed I S, Mallett J D, Brennan L E.Rapid Convergence Rate in Adaptive Arrays[J].IEEE Transactions on Aerospace and Electronic Systems, 1974, AES-10(6): 853-863.
[10] Hao C, Orlando D, Foglia G, et al.Knowledge-Based Adaptive Detection: Joint Exploitation of Clutter and Sys- tem Symmetry Properties[J].IEEE Signal Processing Letters, 2016, 23(10): 1489-1493.
[11] Hao C, Gazor S, Foglia G, et al.Persymmetric Adaptive Detection and Range Estimation of a Small Target[J].IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 2590-2604.
[12] Wang Y L, Liu W J, Xie W C, et al.Reduced-rank Space-time Adaptive Detection for Airborne Radar[J].Science China Information Sciences, 2014,57(8): 106- 116.
[13] Hague D A, Buck J R.The Generalized Sinusoidal Frequency-Modulated Waveform for Active Sonar[J].IEEE Journal of Oceanic Engineering, 2017, 42(1): 109-123.
[14] Changcun S, Zhiliang R, Yaobo L, et al.An Algorithm for Estimating Doppler Frequency of Underwater High-speed Moving Target[C]//2010 IEEE International Conference on Intelligent Computing and Intelligent Systems,Xiamen, China: IEEE, 2010: 14-17.
[15] Brennan L E, Reed L S.Theory of Adaptive Radar[J].IEEE Transactions on Aerospace and Electronic Systems, 1973, AES-9(2): 237-252.
[16] Reed I S, Mallett J D, Brennan L E.Rapid Convergence Rate in Adaptive Arrays[J].IEEE Transactions on Aero- space and Electronic Systems,1974, AES-10(6): 853-863.
[17] Wu W, Wang G H, Sun J P.Polynomial Radon-Polynomial Fourier Transform for Near Space Hypersonic Maneuvering Target Detection[J].IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(3): 1306-1322.
[18] Erdogan A Y, Gulum T O, Durakata L, et al.FMCW Signal Detection and Parameter Extraction by Cross Wigner–Hough Transform[J].IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1): 334-344.
[19] Zhu D, Li Y, Zhu Z.A Keystone Transform Without Interpolation for SAR Ground Moving-Target Imaging[J].IEEE Geoscience and Remote Sensing Letters, 2007, 4(1): 18-22.
[20] Zeng C, Li D, Luo X, et al.Ground Maneuvering Targets Imaging for Synthetic Aperture Radar Based on Second-Order Keystone Transform and High-Order Motion Parameter Estimation[J].IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(11): 4486-4501.
[21] 刘慧敏.基于多普勒敏感信号声图像序列的水下运动小目标探测方法[D].哈尔滨: 哈尔滨工程大学, 2019.
[22] Addabbo P, Orlando D, Ricci G.Adaptive Radar Detection of Dim Moving Targets in Presence of Range Migration[J].IEEE Signal Processing Letters, 2019, 26(10): 1461-1465.
[23] Stoica P, Selen Y.Model-order Selection: A Review of Information Criterion Rules[J].IEEE Signal Processing Magazine, 2004, 21(4): 36-47.
[24] 李娜, 郝程鹏, 施博, 等.水下修正空时自适应检测的性能分析[J].水下无人系统学报, 2018, 26(2): 133-139.
Li Na, Hao Cheng-peng, Shi Bo, et al.Performance An- alysis of Underwater Modified Space-Time Adaptive Detection[J].Journal of Unmanned Undersea Systems, 2018, 26(2): 133-139.
[25] Conte E, Maio A D, Ricci G.GLRT-based Adaptive Detection Algorithms for Range-spread Targets[J].IEEE Transactions on Signal Processing, 2001, 49(7): 1336- 1348.
[26] Robey F C, Fuhrman D L, Kelly E J, et al.A CFAR Adaptive Matched Filter Detector[J].IEEE Transactions on Aerospace and Electronic Systems, 1992, 29(1): 208-216.
[27] Keh-Chiarng H, Chien-Chung Y.A Unitary Transforma- tion Method for Angle-of-arrival Estimation[J].IEEE Transactions on Signal Processing, 1991, 39(4): 975-977.
(责任编辑: 杨力军)
Robust Adaptive Detection Algorithm of Underwater Targets under Range Cell Migration
SONG Qiong1,2, YAN Sheng1, HAO Cheng-peng1, HOU Chao-huan1
(1.The Institute of Acoustics of the Chinese Academy of Sciences, Beijing 100190, China; 2.School of Electrical and Communication Engineering, University of Chinese Academy of Sciences, Beijing 100049, China)
The performance of target adaptive detectors decreases owing to range cell migration(RCM), which is caused by a target moving at high speed.When the detection occurs underwater, this environment also results in a lack of auxiliary data.To solve this problem, this study presents a new adaptive detection algorithm.First, the sonar echo is modeled as multiple time-domain sequences based on the model order selection theory.Then, the multiple hypothesis testing model of the target under RCM is improved by using the persymmetric structure of the covariance matrix of the symmetric array.Finally, a new detection algorithm based on the persymmetric generalized information criterion adaptive matched filter(PM-AMF) is developed.Simulation results show that the PM-AMF detection algorithm reduces the dependence on auxiliary data and accurately estimates the position of the target echo under RCM, achieving a good performance on target detection.
underwater target; range cell migration; adaptive detection; multiple hypothesis testing; sonar
TJ630; TN911.7
A
2096-3920(2021)05-0533-08
10.11993/j.issn.2096-3920.2021.05.004
宋琼, 闫晟, 郝程鹏, 等.一种适用于水下距离徙动目标的稳健自适应检测算法[J].水下无人系统学报, 2021, 29 (5): 533-540.
2021-02-08;
2021-03-09.
国家自然科学基金项目资助(61971412).
宋 琼(1997-), 女, 在读硕士, 主要研究方向为水声信号处理.
