基于自抗扰控制的大跨速鱼雷横滚控制建模与仿真
2021-11-08郑薇,吕瑞,田莘
郑 薇, 吕 瑞, 田 莘
基于自抗扰控制的大跨速鱼雷横滚控制建模与仿真
郑 薇1, 吕 瑞2, 田 莘3
(1. 西安明德理工学院 通识教育学院, 陕西 西安, 710124; 2. 中国船舶集团有限公司 第705研究所, 陕西 西安, 710077; 3. 西安文理学院信息工程学院, 陕西 西安, 710065)
为了解决大跨速鱼雷速度的大范围变化对精确控制的影响, 设计了线性自抗扰控制器。首先, 为了便于设计, 对鱼雷横滚控制数学模型进行了重新推导; 然后将自抗扰控制应用到鱼雷横滚控制中, 实现了对总扰动的估计和实时补偿。仿真结果表明, 该控制器可适应鱼雷28~70 kn速度的大范围变化, 不仅能很好地估计并补偿总扰动, 而且对鱼雷参数的不确定性具有较强的鲁棒性, 可满足大跨速鱼雷横滚通道控制要求, 性能指标明显优于比例-积分-微分控制。
鱼雷; 大跨速; 自抗扰控制
0 引言
随着科学技术的飞速发展, 世界各国的高性能潜艇和水面舰艇在航速、机动性和隐蔽性等领域的技术进步得到了极大的提高。相应地, 现代鱼雷武器系统及反鱼雷技术也有了长足发展, 鱼雷大跨速技术成为未来鱼雷的重要发展方向之一。大跨速鱼雷速度在28~70 kn内变化, 其既能以足够低的速度巡航以节约能源, 使隐蔽性和远航程得到保障, 又能在发现目标后进行快速打击[1]。常规鱼雷速制跨度小, 六自由度动力学模型相对固定, 控制难度不大。而大跨速鱼雷由于速度的大范围变化, 流体动力和失衡力矩会呈现出显著的不同, 空间六自由度运动导致鱼雷动力学方程存在非线性和强耦合性, 要实现鱼雷全速度范围内姿态稳定可控, 传统的鱼雷控制技术已不能满足需要, 给鱼雷控制技术带来了很大的挑战。
长期以来, 以比例-积分-微分(proportional integral differential, PID)控制为代表的经典控制理论形成了完整的理论体系和控制设计方法, 在鱼雷控制的研究和发展中起到了巨大的作用。但随着各种新型鱼雷技术的出现, 经典控制理论已表现得有些乏力[2]。对于现代控制方法应用于鱼雷等水下航行器的控制系统设计中, 已有一些研究成果。自适应滑模控制方法[3-4]综合了自适应与滑模控制的优点, 不需要精确的模型, 有超调量小、响应快及对外界扰动具有很好的鲁棒性等优点。与PID控制相比, 最优控制方法[5]在动态性及稳态指标方面都具有一定优势, 但因其鲁棒性差限制了在控制领域中的应用。反馈线性化[6-7]是通过状态变换将非线性系统动态特性转化成线性系统的动态特性, 从而通过线性控制方法来分析解决问题, 但由于其不具备鲁棒性, 往往需要与鲁棒控制等方法结合使用。
基于此, 文中针对大跨速鱼雷模型参数随速度变化的特性, 重点研究横滚控制通道, 设计了2阶线性自抗扰控制器, 并通过动态响应试验、抗干扰试验及参数摄动试验, 验证了所设计控制方法的有效性和鲁棒性。
1 大跨速鱼雷数学模型
鱼雷的动力学模型是高度耦合的非线性模型,为便于交流, 采用国际通用的坐标系和流体动力参数形式表示, 鱼雷横滚控制通道动力学方程为(相关参数含义详见文献[8])
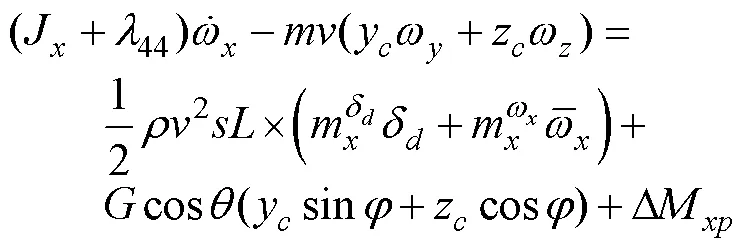
简记为

其中
鱼雷横滚通道的运动学方程为

简记为

其中

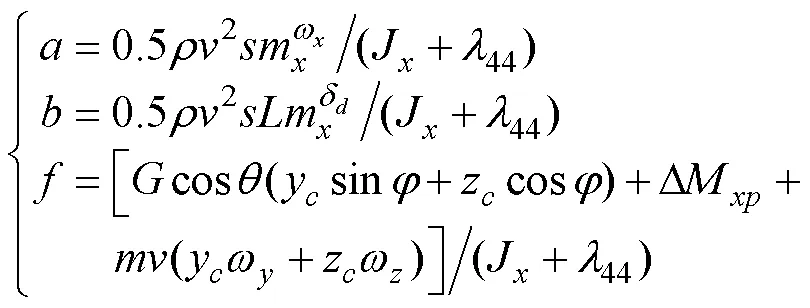
结合动力学方程与运动学方程, 经进一步推导, 鱼雷横滚通道的数学模型可改写为

其中

2 控制器设计
自抗扰控制(active disturbance rejection control, ADRC)技术是一种新型实用的非线性控制技术[9]。自抗扰控制律主要由跟踪微分器(tracking differentiator, TD)、扩张状态观测器(extended state observer, ESO)和非线性状态误差反馈律(no- nlinear law state error feedback, NLSEF)三部分组成[9], 其核心思想是利用ESO去实时估计被控对象的“内扰”和“外扰”(合称总扰动), 然后对总扰动进行补偿, 通过设计反馈控制律, 从而简化为积分器串联结构的系统, 达到预期的控制效果。由于有总扰动补偿的存在, 系统具有很强的抗干扰能力, 并且能够获得较强的鲁棒性。其原理框图如图1所示。
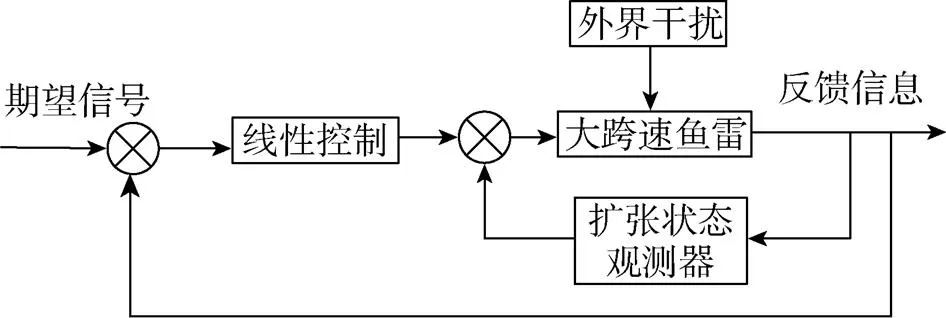
图1 ADRC系统原理框图
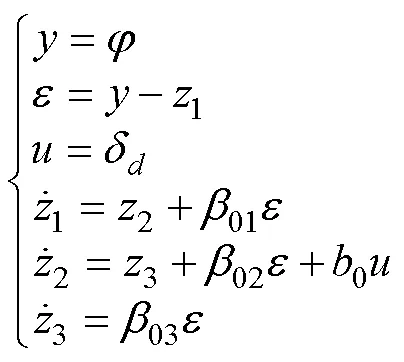
2.1 扩展状态观测器设计
由于线性的ESO简单且容易实现, 对系统输出以及总扰动具有很好的观测效果, 采用如下的参数化线性ESO设计方案[10-11]
2.2 自抗扰控制器设计
取控制律为
将控制律代入式(7)描述的数学模型中, 得

经过ESO对系统中总扰动估计补偿后, 被控对象被转换为2个积分串联环节。
控制量设计取如下PID控制器为

式中,为系统参考输入。
根据经典控制理论, 可知系统闭环传递函数为

线性ADRC继承了ADRC的优点, 不需要具体的数学模型, 且具有很强的鲁棒性。同时由于采用了带宽参数化设计思想, 使待设计参数数量大大减少, 提高了工程应用价值。
3 仿真与分析
仿真计算流程图如图2所示。

图2 仿真计算流程图
3.1 动态响应试验
模型参数取标称值, 横滚控制通道进行阶跃响应试验, 仿真工况分别为: 1) 鱼雷速度28 kn; 2) 鱼雷速度70 kn。
动态响应仿真曲线如图3所示。由图可知, 线性ADRC与PID动态响应相近, 均能良好地实现指令控制, 没有明显的稳态误差。
3.2 抗干扰试验
1) 恒值干扰
模型参数取标称值, 横滚控制通道增加恒值干扰进行抗干扰试验。恒值干扰为鱼雷失衡力矩, 随速度变化而变化。仿真时间为100 s、50 s时速度由28 kn变成70 kn。恒值干扰下横滚通道响应曲线见图4。
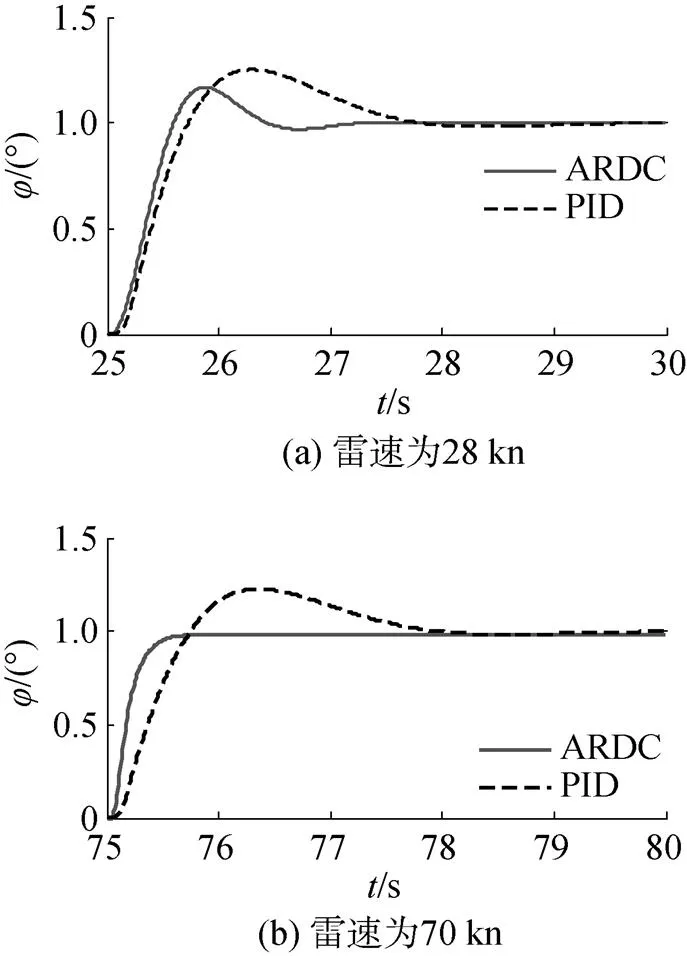
图3 动态响应曲线
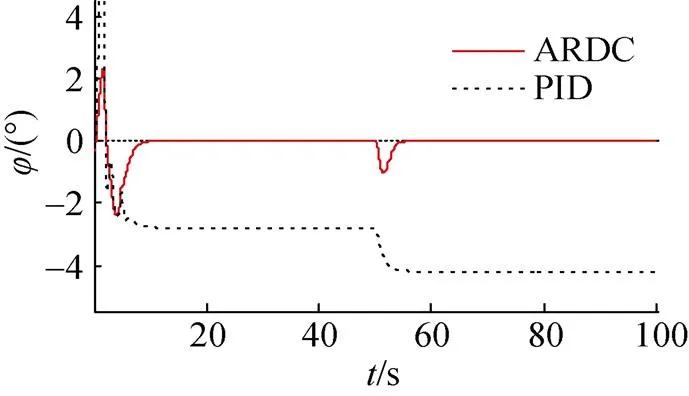
图 4 恒值干扰下横滚通道响应曲线
由图4可知, 在恒值干扰存在下采用PID控制的横滚角响应曲线有明显的稳态误差, 相比较而言, ADRC对恒值干扰有很强的抑制能力。
2) 正弦干扰
模型参数取标称值, 横滚控制通道增加正弦干扰进行抗干扰试验。在横滚通道模拟周期性的正弦干扰, 频率为0.1 rad/s。仿真曲线见图5。
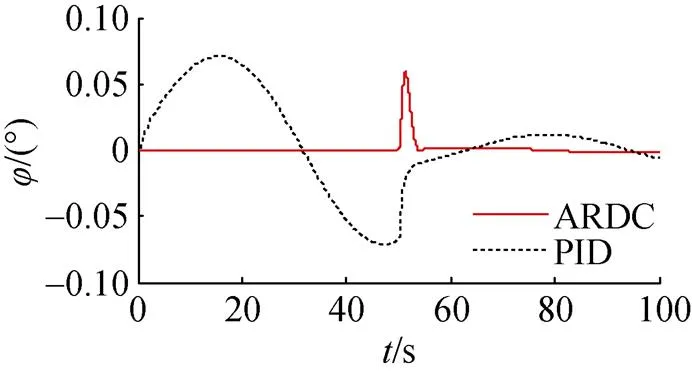
图5 正弦干扰下横滚通道响应曲线
由图5可知, 在正弦干扰作用下, PID控制下的横滚响应随干扰出现明显波动, 相比较而言, ADRC很好地估计了干扰值并进行了实时补偿, 系统稳态误差被控制在可以接受的范围内。
3) 白噪声干扰
模型参数取标称值, 横滚控制通道增加白噪声干扰进行抗干扰试验。白噪声干扰采样周期为5 s, 白噪声干扰归一化曲线和横滚响应曲线如图6~图7所示。

图6 白噪声干扰下横滚通道响应曲线
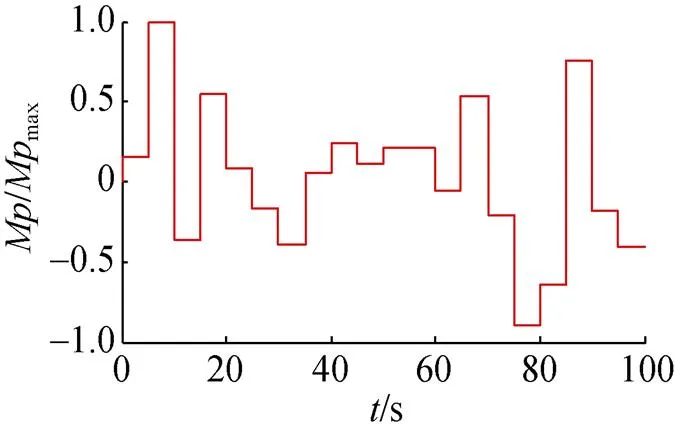
图7 归一化后白噪声干扰
由图6和图7可知, 在白噪声干扰作用下, PID控制下横滚响应随干扰出现明显的波动, 相比较而言, ADRC对白噪声干扰进行了实时估计和补偿, 虽然也有波动出现, 但控制效果更好。
3.3 模型参数摄动试验
4 结束语
文中针对大跨速鱼雷横滚稳定控制问题, 设计了自抗扰控制器, 对系统的总扰动进行实时估计和动态补偿, 很好地实现了大跨速鱼雷的稳定控制。仿真结果表明, 与经典PID控制相比, 所设计的控制器可以很好地估计和实时补偿总扰动, 在系统存在恒值、正弦等多种干扰作用和参数摄动不确定时, 仍能保持良好的控制能力。

图8 ADRC控制下横滚响应曲线

图9 PID控制下横滚响应曲线
下一步将开展ADRC参数优化技术和工程应用研究, 用嵌入式计算机技术实现ADRC控制方法, 并通过试验验证控制效果。
[1] 吴和声, 徐杏钦.高科技背景下的鱼雷武器[J].鱼雷技术, 2003, 11(3): 1-2.
Wu He-sheng, Xu Xing-qin.Torpedo Weapon Against Hi- tech Back Ground[J].Torpedo Technology, 2003, 11(3): 1-2.
[2] 张西勇, 李宗吉, 王树宗. 基于变结构控制的反鱼雷鱼雷姿态解耦控制[J].控制理论与应用, 2012, 29(11): 1501-1506.
Zhang Xi-yong, Li Zong-ji, Wang Shu-zong.Decoupling- control System Based on Variable-structure Control for Anti-torpedo Torpedo Poses[J].Control Theory & Applications, 2012, 29(11): 1501-1506.
[3] 严卫生, 高剑, 张福斌, 等. 无级变速鱼雷的自适应滑模控制研究[J]. 鱼雷技术, 2006, 14(2): 12-15.
Yan Wei-sheng, Gao Jian, Zhang Fu-bin, et al. Adaptive Sliding-Mode Control of Stepless Speed Torpedo[J]. Torpedo Technology, 2006, 14(2): 12-15.
[4] 王子健, 严卫生, 高剑, 等. 三速制鱼雷自适应滑模控制研究[J]. 兵工学报, 2012, 33(3): 340-346.
Wang Zi-jian, Yan Wei-sheng, Gao Jian, et al. Adaptive Sliding-mode Control of Tri-speed Torpedo[J]. Acta Armamentarii, 2012, 33(3): 340-346.
[5] 郭勍, 党涛立, 范奎武. 基于广义功极小值原理的鱼雷最优控制问题[J]. 鱼雷技术, 2006, 14(5): 38-41
Guo Qing, Dang Tao-li, Fan Kui-wu.Optimization Con- trol of Torpedo Based on Generalized Work Minimum Principle[J]. Torpedo Technology, 2006, 14(5): 38-41.
[6] 张凯, 刘雁集, 马捷. 水下滑翔机的反步与反馈线性化控制对比研究[J]. 舰船科学技术, 2015, 37(12): 139-143.
Zhang Kai, Liu Yan-ji, Ma Jie. Pitch Control of Underwater Glider: Performance Comparison Back Stepping.Input-output Feedback Linearization[J].Ship Science and Technology, 2015, 37(12): 139-143.
[7] 齐霄强, 赵琳, 赵玉新, 等. 反馈线性化在潜器悬浮控制系统中的应用[J]. 系统仿真学报, 2009, 21(8): 2391- 2394.
Qi Xiao-qiang, Zhao Lin, Zhao Yu-xin, et al. Hovering Control for Underwater Vehicle Based on Feedback Linearization[J]. Journal of System Simulation, 2009, 21(8): 2391-2394.
[8] 严卫生. 鱼雷航行力学[M].西安: 西北工业大学出版社, 2005.
[9] 韩京清. 自抗扰控制技术[M].北京: 国防工业出版社, 2009.
[10] Gao Z Q. Active Disturbance Rejection Control: A Paradigmshift in Feedback Control System Design[C]//Pro- ceedings of the 2006 American Control Conference. Minneapolis, Minnesota: IEEE, 2006: 23992405.
[11] Sun B S, Gao Z Q. A DSP-based Active Disturbance Rejection Control Design for a 1 kW H-bridge DC-DC Power Converter[J]. IEEE Transactions on Industrial Electr- onics, 2005, 52(5): 1271-1277.
Modeling and Simulation of Roll Control for a Wide-Speed-Scope Torpedo Based on ADRC
ZHENG Wei1, LÜ Rui2, TIAN Xin3
(1. College of General Education, Xi’an Mingde Institute of Technology, Xi’an 710124, China; 2. The 705 Research Institute, China State Shipbuilding Corporation Limited, Xi’an 710077, China; 3. Information Engineering Department, Xi’an University, Xi’an 710065, China)
To overcome the difficulties of a large range of variations in the velocity of a wide-speed torpedo on precise control, a linear active disturbance rejection control(ADRC) method is designed. First, the mathematical model of rolling control is derived for a wide-speed torpedo for a convenient design. Next, the proposed ADRC is used for the rolling control of the torpedo to estimate and compensate for the total disturbances in real time. Simulation results show that the designed controller can adapt to a wide speed range of 28~70 kn. Furthermore, it can accurately estimate and compensate for the total disturbances and account for the uncertainty of the torpedo parameters. Thus, the proposed controller fulfills the requirements of a controller of the roll channel for a wide-speed-scope torpedo and its performance is superior to that of a proportional-integral-differential control.
torpedo; wide-speed-scope; active disturbance rejection control(ADRC)
郑薇, 吕瑞, 田莘. 基于自抗扰控制的大跨速鱼雷横滚控制建模与仿真[J]. 水下无人系统学报, 2021, 29(5): 575-579.
TJ630; TP13
A
2096-3920(2021)05-0575-05
10.11993/j.issn.2096-3920.2021.05.009
2020-04-09;
2020-06-09.
西安市科技计划项目(2020KKJWL14)
郑 薇(1984-), 女, 副教授, 研究方向为非线性系统建模与仿真技术.
(责任编辑: 杨力军)
