双层平筛式半夏收获机设计与试验
2021-11-03张锋伟张陆海杨小平
王 锋,张锋伟,戴 飞,张陆海,赵 伟,杨小平,*
(1.甘肃农业大学 机电工程学院,甘肃 兰州 730070; 2.甘肃省农业机械化技术推广总站,甘肃 兰州 730070; 3.定西市三牛农机制造有限公司,甘肃 定西 743022)
半夏为天南星科植物,药用历史悠久,为大宗中药材之一,具有消痞散结、燥湿化痰和降逆止呕等功效,在健康养生和防治未病等领域发挥着重要作用,市场需用量大,经济效益好。随着半夏野生资源的急剧减少,栽培半夏已成为药用的主要来源[1-3]。我国半夏主产于山东、贵州、甘肃和云南等地的丘陵山区地带[4]。道地产区——甘肃的药农仍选用传统的人工翻抛捡拾方式收获[5],劳动强度大,效率低,收获期长,收获损失率高,降低了半夏种植的经济效益[6-7]。
目前,关于半夏收获机的研究相对较少。半夏为根茎类作物,收获的关键环节为挖掘、升运和筛分,可借鉴机型包括马铃薯、大蒜、菊芋、黄芪等收获机[8-11],但因挖掘深度、种植密度和分离尺寸与半夏不匹配,上述机型均不适用于半夏收获[12]。郑德聪等[13]针对半夏的种植特点和块茎性状设计了4SB-800型半夏收获机;李海等[14]针对收获效率和收获精度进行改进,仿真设计了半夏收获机。然而,上述设计出的半夏收获机在实际应用中仍存在着采收不彻底、分离效果不佳、二次除杂工作量大等问题。
近年来,离散元法被用来模拟物料筛分[15],不少学者应用离散元法对筛分效果进行研究[16-17],但在本研究检索范围内,关于半夏筛分的研究鲜见报道。
为此,本研究结合半夏物性与种植农艺,以及现有研究,设计一种双层平筛式半夏收获机。该收获机采用“升运装置+筛分装置”的整机结构设计,对升运装置和筛分装置分别进行结构设计与参数选择,对所选参数平筛的筛分效果进行仿真分析,并用所设计的双层平筛式半夏收获样机展开收获试验,以期为半夏等浅根茎类农作物收获机的设计和试验提供参考。
1 总体结构与工作原理
1.1 半夏种植农艺与机械化收获要求
甘肃省内的半夏种植区主要分布在清水县和西和县,多小块地、山坡地和水平梯田。当地的半夏生产一般采用条播种植的方式,繁殖方法分为块茎繁殖和株芽繁殖。块茎繁殖,行距160~200 mm,株距60~100 mm,穴深50 mm,覆土厚度30~50 mm;株芽繁殖,行距100~160 mm,株距60~100 mm,覆土厚度10~20 mm。在田间管理阶段,除施肥外,培土厚度10~20 mm[18]。人工种植条件下,半夏收获期的深度为70~80 mm;机械种植条件下,半夏收获期的深度为50~60 mm。
半夏收获时,要求完整掘出半夏与土壤复合物,待提升至一定高度后,分离半夏与土壤,完成收集等作业。机械化收获要求半夏收获机具有成本低廉、适宜推广、分离效果好、作业性能稳定、功耗小、操作简单、适用于丘陵山地的特点。
1.2 整机结构、工作原理和主要技术参数
双层平筛式半夏收获机主要由挖掘装置、旋转耙齿、升运装置、筛分装置、支撑轮装置、收集箱、传动系统和机架组成(图1)。其中,挖掘装置由条形铲[13]、铲托、分石栅、固定板和固定螺栓组成,并由铲托两端与侧面板开口焊接固定于机架上,固定螺栓连接条形铲与固定板,固定板与铲托焊接,分石栅等间距焊接于铲托后侧;筛分装置主要由上下2层平筛、偏心装置、弹簧等组成,工作过程中,由偏心装置中偏心轮的撞击与弹簧形变实现周期性筛分;支撑轮装置由支撑轮杆、支撑轮、支撑轮调高手柄等组成,可根据工况需要,对支撑轮高度进行调节。样机主要技术参数整理于表1。
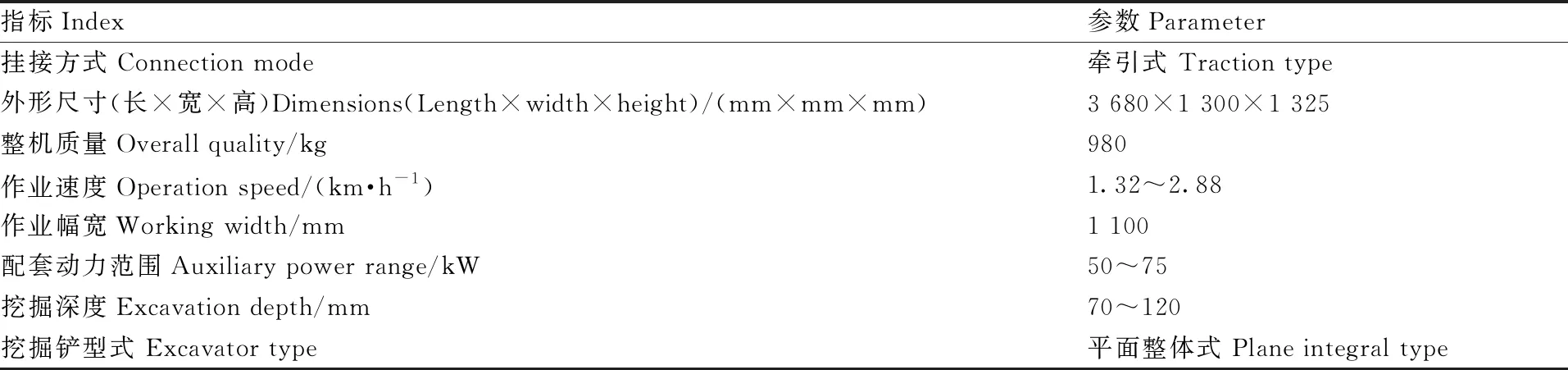
表1 主要技术参数
样机作业时,挖掘装置切入土壤,被掘起的土壤与半夏复合物划过铲托、分石栅,与升运装置接触,升运装置将复合物提升,旋转耙齿将土垡切开,在升运装置运动下,实现土壤与半夏块茎的初次分离。提升后的复合物经升运装置末端以一定速度落至筛分装置的筛面,半夏与土壤复合物在筛面完成抛起、回落、前后滑移等过程[19]。随着双层平筛的周期性运动,较大块的土壤逐渐变小,粒径小于上层筛孔尺寸的半夏与土壤透过上层筛网,进入下层筛网完成进一步筛分。之后,半夏块茎与少量未透过筛网的土块一起落入位于筛分装置后方的收集装置,完成收获。
2 关键部件设计
2.1 升运装置设计与参数选择
2.1.1 结构设计
升运装置由输送链、托链轮组和主动链轮组组成(图2)。其中,输送链由3条节距、长度相等的套筒滚子链和L形刮板组成,套筒滚子链由内链板、外链板与销轴组成,L形刮板由螺栓固定在套筒滚子链的外链板上;托链轮组由方钢、硬质塑料托链轮、螺栓和支撑轮固定板组成;主动链轮组由3组同型号的主动链轮等间距地分布在链轮轴上。升运装置位于挖掘装置后方,工作过程中,位于轴端的传动链轮将动力传递给主动链轮组,带动输送链转动,在L形刮板作用下,将挖掘装置掘起的半夏与土壤复合物提升至所需高度。
2.1.2 升运装置参数选择
升运装置的倾角为55°,根据幅宽和样机结构布置方式,设定输送宽度为980 mm,工作长度为1 160 mm,输送高度为950 mm。输送链由3条双边带耳套筒滚子链与多个L形刮板组成。输送链上的L形刮板宽度为980 mm,齿高为38 mm,厚度为2.5 mm。滚子链的节距增大,承载能力会增强,多边形效应更显著,冲击振动也随之变大。为使机具结构紧凑、链条寿命长,选择节距较小的单排套筒滚子链[20],型号为12A-1(GB/T 1243—2006),节距为19.05 mm。主动链轮的分度圆直径(d1,mm)为
(1)
式(1)中:p为链条节距,mm;z为齿数,由传动关系选取主动链轮的齿数为12齿。经计算,分度圆直径为73.604 mm。
为将挖掘装置掘起的复合物及时输送给后续筛分装置,并减少挖掘装置末端土垡壅塞,输送链的速度应满足如下关系[21]:
v2cosθ-v1≥0。
(2)
式(2)中:v1为半夏收获机前进速度,半夏收获速度不宜过快,可取0.37~0.8 m·s-1,本机设计值为0.5 m·s-1;v2为输送链的线速度,m·s-1;θ为升运装置与水平方向的夹角,为使机具结构紧凑,取θ为55°。
忽略链轮的跳动,将链轮的运动近似为圆周运动,则有
(3)
式(3)中:n1为输送链主动轴转速,r·min-1。
输送链主动轴的转速应满足如下关系:
(4)
由式(4)计算可知,n1≥226.2 r·min-1。当拖拉机动力输出轴以标准转速540 r·min-1输出时,设计输送链主动轴转速为235 r·min-1。将其代入式(3),得出v2=0.906 m·s-1。
升运装置的升运量(Q,kg·s-1)[19]为
Q=B1hv2ζψk×10-6。
(5)
式(5)中:B1为刮板宽度,同输送宽度,980 mm;h为L形刮板高度,设定为38 mm;ζ为输送物料单位容积的质量,取1 500 kg·m-3;ψ为充满系数,当v2=0.906 m·s-1时,ψ取0.93;k为倾斜系数,取0.15~0.85,根据升运装置倾角,用插值法确定k为0.33。
根据式(5)计算得出,升运装置的升运量Q为15.5 kg·s-1。升运装置需用功率(P′,kW)为
P′=Qg(L3W+H1) ×10-6。
(6)
式(6)中:g为重力加速度,m·s-2;L3为升运装置水平投影长度,mm;H1为升运装置垂直高度,mm;W为运动阻力系数,其中套筒滚子链为1.05~2.25,此处根据升运量,选取W为1.05。
经测算,升运装置需用功率P′为0.25 kW,则传递功率(P,kW)为
(7)
式(7)中:η为链传动效率,取0.8。经计算,传递功率P为0.312 5 kW,则计算功率(Pca)为
(8)
式(8)中:KA为工况系数,取1.3;Kz为主动链轮齿数系数,取2.25;Kp为多排链系数,取2.5。将其代入式(8),得出计算功率Pca为0.366 kW。
2.2 筛分装置设计与参数选择
2.2.1 结构设计
半夏块茎与土壤复合物分离的核心部件是筛分装置,采用偏心轮式双层摆动平筛,用偏心轮与弹簧组合的方式为平筛传递动力。筛分装置主要由偏心装置、双层平筛和弹簧等部分组成(图3)。其中,偏心装置由偏心轮轴、偏心轮、偏心轮外轴承和传动链轮组成;双层平筛由上层筛(粗筛)、下层筛(细筛)、筛架、前吊杆和后吊杆组成。
2.2.2 筛分装置相关参数选择
经实测,甘肃省半夏块茎的三轴尺寸分布区间为5~30 mm,结合半夏种植农艺和样机设计要求[16],选择平筛宽度为1 030 mm,长度为1 900 mm,上层筛网筛孔尺寸为24.5 mm×24.5 mm,下层筛网筛孔尺寸为24.5 mm×12.25 mm,前、后吊杆长度均为295 mm。
筛面复合物的运动状态直接影响筛分效率,因此筛面复合物应有很好的通过性和透筛性,若通过性差,会造成复合物堆积,导致筛面负载过大,不利于筛分。为满足筛面复合物的通过性和透筛性要求,需要筛面复合物以一定速度后滑、前移和抛起,从而实现筛分[19]。以下针对筛面上复合物的运动特性进行分析,以合理选择双层平筛的运动参数,其中,决定运动状态的主要参数包括偏心轮转速(n2,r·min-1)、偏心轮的偏心距(r,mm)、筛面倾角[α,(°)]、筛子摆动方向与水平面之间的夹角[γ,(°)]、筛子摆动方向与筛面夹角β[β=γ-α,(°)]。筛子的加速度决定筛面物料的运动形式和方向,筛子加速度(a,m·s-2)应满足如下关系[19]:
a=ω2rcos(ωt1)×10-3。
(9)
式(9)中:ω为偏心轮角速度,rad·s-1;t1为偏心轮转动时间,s。
复合物沿筛面向后滑移的条件为
(10)
式(10)中:f为滑动摩擦系数,可取0.43~0.80。
复合物沿筛面向前滑移的条件为
(11)
筛面复合物被抛起的条件为,筛子速度的法相分量和筛子加速度的法相分量的方向向下,筛子加速度的绝对值大于或等于重力加速度的法相分量,可得:
(12)
为保证良好的输送能力,β可取15°~25°。
对设计中的平筛,选取筛面倾角α=0。筛分装置在升运装置之后,位于机具中后部,选取β为25°、滑动摩擦系数f为0.6,则满足复合物沿筛面向前、向后和抛起的平筛加速度不应小于23.18 m·s-2。
偏心轮转速(nr)为
(13)
式(13)中:K为保证抛起土垡和土块飞越时间等于偏心轮转动整圈所需时间的系数。偏心轮的偏心距即为振幅,适宜的振幅可取15~25 mm,K可取3.3~4.0[19]。
相应计算出满足复合物抛起的偏心轮转速为530~753 r·min-1。当拖拉机动力输出轴以标准转速540 r·min-1输出时,设计偏心轮的转速为540 r·min-1,偏心距为20 mm。
筛分装置的布置位置对整机结构和筛分效果均有影响。经升运装置末端抛出的复合物会受到重力影响,为研究复合物由升运装置末端下落时的运动特性和落至筛面的力学特性[22],选单个半夏颗粒为研究对象(图4)。半夏在升运装置末端以输送链线速度v2抛出,忽略空气阻力,在重力作用下做匀变速曲线运动,建立坐标系,以摆动筛上升至最高位置进行分析:
vx=v2,vy=gt2;
(14)
(15)
(16)
(17)
式(14)~(17)中:v3为半夏块茎与筛面初次接触速度,m·s-1;vx为v3的水平分量,m·s-1;vy为v3的垂直分量,m·s-1;H2为筛面距升运装置末端垂直距离,mm;t2为半夏块茎运动H2高度所需时间,s;x为升运装置末端在水平方向投影与半夏落点距离,mm。
输送链线速度不变时,H2增大,初次碰撞筛面的水平距离增大,整机长度尺寸变大,对筛面冲击增大。考虑整机结构,选择筛面距升运装置末端垂直距离H2为350 mm,升运装置末端在水平方向投影与半夏落点距离x为242 mm。
2.2.3 筛分过程模拟
运用EDEM软件模拟筛分过程,以验证筛分装置运动参数选取的合理性。对频率为9 Hz(偏心轮转速为540 r·min-1)、幅值为20 mm(偏心轮的偏心距为20 mm)所对应的被筛分复合物在筛面的分布情况、标记颗粒竖直方向运动情况和半夏与土壤颗粒竖直方向总速度变化情况进行分析。
半夏块茎与土块为不同属性的物体,与筛面作用复杂,考虑建模的复杂性与仿真的有效性,在不影响仿真结果的前提下,均用单个球型颗粒代替。设置颗粒尺寸服从高斯分布,采用系统默认的Hertz-mindlin(no-slip)模型进行分析。根据输送链线速度,设置工厂生成颗粒初速度为0.906 m·s-1,方向为EDEM坐标系中的Y轴方向,颗粒工厂距离筛面高度为350 mm,筛子运动形式为正弦运动。将主要仿真模型参数整理于表2[23-24]。
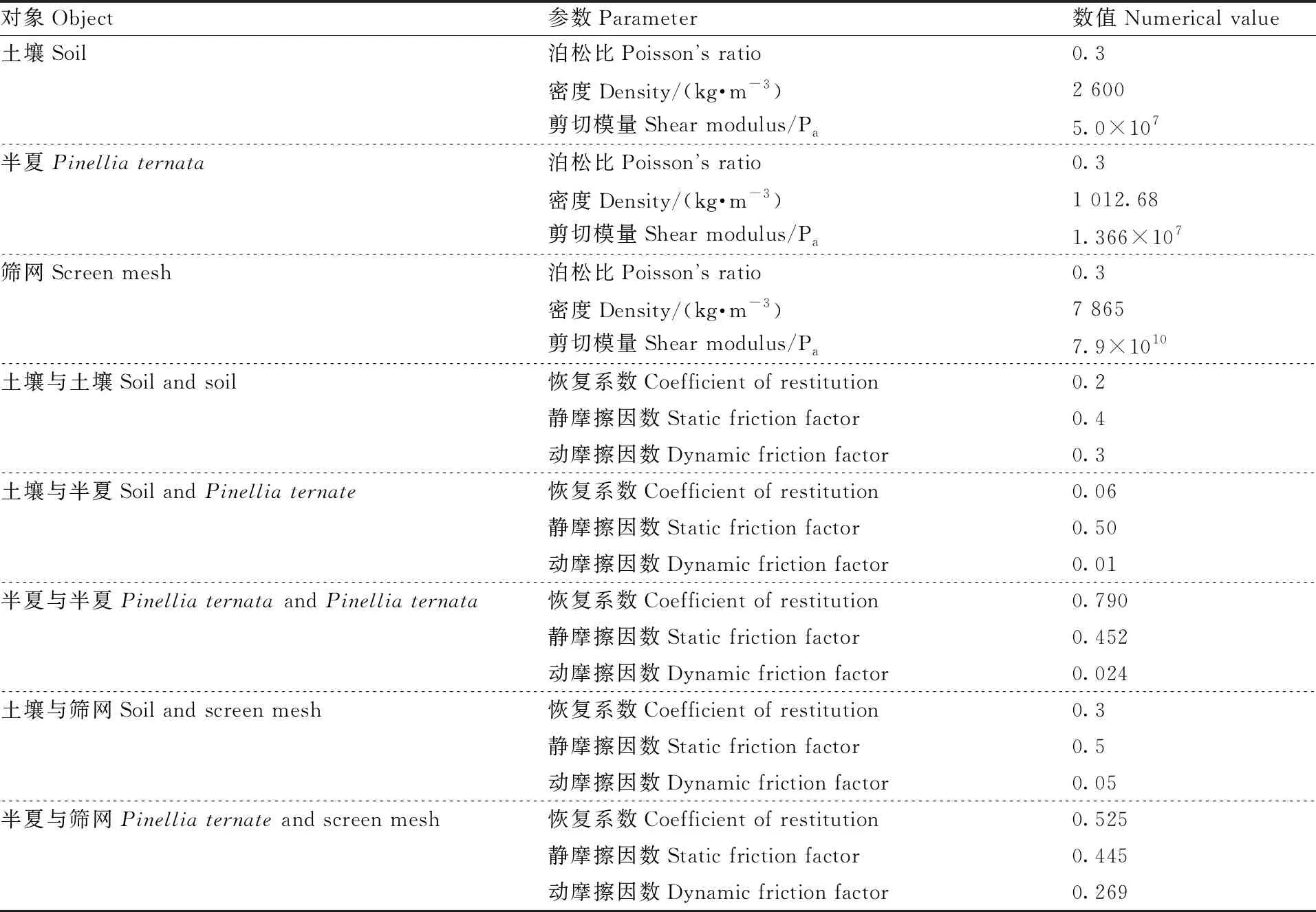
表2 仿真模型参数
利用软件仿真双层平筛筛分过程的颗粒速度(图5),筛面颗粒分布均匀,图5中箭头的方向和流向表明半夏与土壤复合物具备很好的流动性,筛面复合物可以完成后滑、前移和抛起运动,所选幅值和频率参数可避免复合物在筛面淤积导致的筛分不畅现象,所选参数合理。
频率和振幅影响筛分效果,复合物颗粒与筛面的接触次数影响透筛概率。频率增大,复合物颗粒与筛面的接触次数增加,透筛概率增加,这有利于筛分效率的提高。振幅增大,可以减少筛孔堵塞,有利于复合物分层,但复合物和筛网的接触次数减少,筛分效率降低;振幅减小,筛面复合物运动速率降低,复合物抛起运动减弱,同样影响筛分效率。选取竖直方向轨迹为研究对象(仿真系统Z轴方向),标记颗粒Z轴坐标值随时间的变化(图6)。结果显示,复合物颗粒与筛网平均接触12次,筛面上复合物运动速率适中,在Z轴方向有明显的周期性跳动,说明所选参数合理。
半夏块茎与土块为不同属性的物体,分析其在竖直方向上总速度随时间的变化情况(图7)。在所选频率和幅值参数下,半夏与土壤总速度分布区间差别明显,有利于复合物分层,说明按照所选频率可以实现筛分。
3 田间试验与分析
3.1 试验条件
双层平筛式半夏收获样机性能试验于2020年8月下旬在甘肃省天水市清水县杨湾村半夏试验田进行。试验田为平坦梯田地,土壤为砂壤土,含水率13%,容重1.15 g·cm-3,土壤松散,土粒黏结力适中,此时半夏茎块容易与土壤分离。
供试半夏品种为旱半夏。试验田种植密度符合半夏种植农艺技术相关要求,半夏茎块深度为65~80 mm,配套动力为沃得奥龙854拖拉机,功率为56.3 kW。
3.2 试验方法
按照NY/T 3481—2019《根茎类中药材收获机 质量评价技术规范》和NY/T 648—2002《马铃薯收获机质量评价技术规范》规定的方法开展田间试验(图8),分别测定挖掘深度、挖净率、伤损率和含杂率。
试验过程中,样机前进速度控制在0.5 m·s-1,调试后挖掘深度平均值为83 mm。每组试验选3个试验小区,结果取测试小区平均值,并保证参数选取均在有效理论分析范围之内。
3.3 试验结果
结合甘肃西和县和清水县半夏种植的特点,要求半夏的挖净率≥95%,损伤率≤5%,含杂率≤5%。取双层平筛式半夏收获样机进行性能试验,按照试验所定的标准,人工测量并计算出各试验数据(表3),挖净率、伤损率和含杂率均符合上述要求。
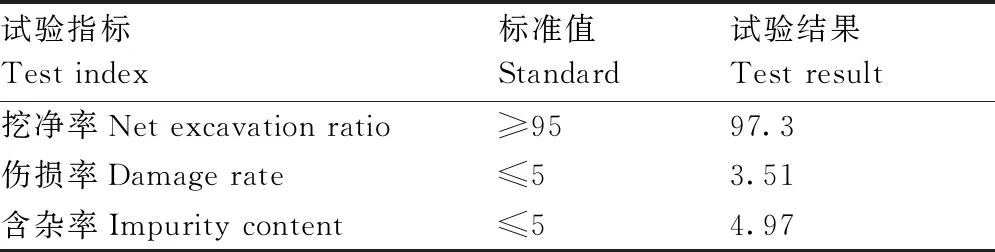
表3 双层平筛式半夏收获机收获指标
4 结论
针对丘陵山地人工收获劳动强度大、效率低、收获期长、收获损失率高,现有半夏收获机械采收不彻底、分离效果不佳等问题,结合半夏种植农艺,设计双层平筛式半夏收获机。该样机能实现半夏的挖掘、筛分和收集等作业功能。为实现半夏与土壤的有效筛分,结合半夏物理特性,确定双层平筛的结构参数;通过动力学理论,确定双层平筛的运动参数;应用EDEM软件模拟了理论计算参数内双层平筛的动态筛分过程,验证了运动参数选取的合理性。田间试验表明,双层平筛式半夏收获机完成收获作业后,半夏的挖净率为97.3%,伤损率为3.51%,含杂率为4.97%,试验指标符合NY/T 3481—2019《根茎类中药材收获机 质量评价技术规范》要求,样机作业过程平稳,可进行半夏收获作业。研究结果可为半夏收获机的设计与试验提供参考。