机器人输送链参数与基坐标系校准融合方法
2021-09-05李亚萍刘春鹏张黎燕王云飞杜全斌侯守坡
李亚萍,刘春鹏,张黎燕,王云飞,杜全斌,侯守坡
(河南机电职业学院,河南郑州 451191)
0 引言
工业机器人作为先进制造业中不可替代的重要装备和技术手段,已经成为衡量一个国家制造业水平和科技水平的重要标志。分拣机器人工作站因具有刚度高、速度快和柔性强的特点,广泛应用于食品、电子、药品和轻工等行业。在安装调试分拣机器人的过程中,需要校准输送链CountsPerMeter参数,即输送链每前进1 m 控制器实际采集到的脉冲信号(Count)个数。CountsPerMeter 是用于计算输送链行进距离的参数,知道了每米采集到的脉冲个数,同时就能求出采集到N 个脉冲数时输送链移动了多少距离。编码器只要将脉冲数传递给控制器,控制器就可以准确计算出任意时间内输送链行进的距离。
基坐标系是以机器人安装基座为基准、用来描述机器人本体运动的直角坐标系。任何机器人都离不开基坐标系,基坐标系也是机器人TCP 在三维空间运动空间所必需的基本坐标系(面对机器人前后:X 轴,左右:Y 轴,上下:Z 轴)。
在校准输送链CountsPerMeter 参数时,也需要校准基坐标系。因为基坐标系影响输送链的跟踪精度。当前,工程人员所采用的技术手段为首先分别开启和停止输送链2 次,同时校准CountsPerMeter 参数。然后再分别开启和停止输送链4 次,校准基坐标系。两步校准操作方式在步骤上存在局部接近,调试过程不够精炼,比较费时。
1 校准输送链CountsPerMeter 参数方法
校准CountsPerMeter 主要目的是让机器人控制器能够准确知道输送链行进距离。通过测量计算CountsPerMeter的真实大小,并在示教器上设置此参数,来告诉机器人有关输送链的相对位置数据。
启动输送链,工件通过同步开关。
第一步,示教校准CountsPerMeter 参数所需的第一点:停止输送链,记录示教器上输送链装置坐标值。把机器人末端示教至工件上方,校准针对准工件的特征点,记录示教器上机器人装置的当前坐标值,机器人末端位置如图1 所示。
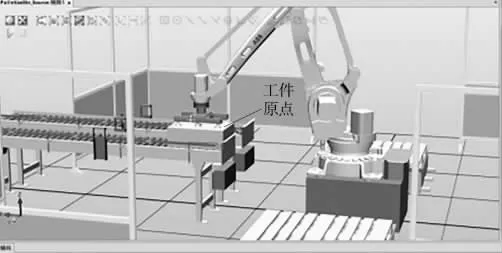
图1 机器人末端位置
第二步,示教校准CountsPerMeter 参数所需的第二点:启动输送链,目测工件移动0.5~1.5 m 时,停止输送链,记录示教器上输送链装置坐标值。把机器人末端示教至工件上方,校准针对准工件的特征点,机器人末端校准值如图2 所示,记录示教器上机器人装置当前坐标值。
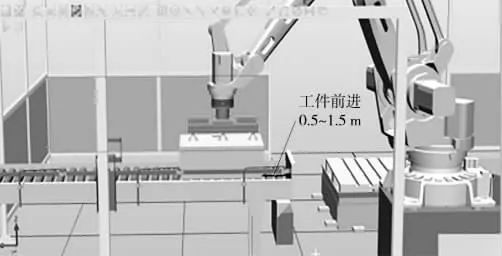
图2 机器人末端校准值
第三步,校准CountsPerMeter 参数:根据第一和第二步中输送链装置坐标值计算出两点间输送链距离,再根据上述机器人装置坐标值计算两点间实际距离。由公式CountsPerMeter=输送链距离×初始值/实际距离,以此计算参数,并输入工业机器人。
2 基坐标系校准方法
基坐标系是设置在机器人基座中的坐标系,坐标原点一般为基座中心点。可以通过在基座标X 轴、Y 轴、Z 轴上的位移和旋转角来确定机器人末端法兰或抓手的位置和姿态。
第一步,示教校准基坐标系所需的第一点:把工件坐标切换到与输送链关联的工件坐标,执行激活输送链指令后,启动输送链。工件通过同步开关和0.0 m 位置后,等待连接工件坐标系指令完成,停止输送链。把机器人末端示教至工件上方,校准针对准工件的特征点,在校准基座选项的第一点上修改位置。
第二步,示教校准基坐标系所需的第二点:启动输送链,目测工件移动0.1~0.3 m 时,停止输送链,把机器人末端示教至工件上方,校准针对准工件的特征点,在校准基座选项的第二点上修改位置。
第三步,示教校准基坐标系所需的第三点:启动输送链,目测工件移动0.1~0.3 m 时,停止输送链。把机器人末端示教至工件上方,校准针对准工件的特征点,在校准基座选项的第三点上修改位置。
第四步,示教校准基坐标系所需的第四点:启动输送链,目测工件移动0.1~0.3 m 时,停止输送链。把机器人末端示教至工件上方,校准针对准工件的特征点,在校准基座选项的第四点上修改位置。
第五步,校准基坐标系:确认上述第一到第四步,即确认机器人末端四次对准工件上的特征点时,输送链的坐标值,从而确定基坐标系。
3 输送链CountsPerMeter 参数与基坐标系融合校准方法
通过对比校准输送链CountsPerMeter 参数方法和基坐标系校准方法,发现两者在操作步骤上存在相似之处,可以对重复的操作步骤进行融合,简化操作流程。
第一步,示教校准CountsPerMeter 参数和基坐标系所需的第一点:激活输送链指令后,启动输送链,执行等待连接工件坐标系指令。工件通过同步开关和0.0 m 位置后,停止输送链,把工件坐标切换到机器人固定坐标,把机器人末端示教至工件上方,校准针对准工件的特征点,记录示教器上机器人装置当前坐标值,并记录示教器上输送链装置坐标值。把工件坐标切换回与输送链关联的工件坐标,在校准基座选项的第一点上修改位置。这一步合并了校准CountsPerMeter 参数所需的第一点和校准基坐标系所需的第一点。
第二步,示教校准基坐标系所需的第二点:启动输送链,目测工件移动0.1~0.3 m 时,停止输送链,把机器人末端示教至工件上方,校准针对准工件的特征点,在校准基座选项的第二点上修改位置。这一步只针对基坐标系校准,不涉及CountsPerMeter参数的校准。
第三步,示教校准基坐标系所需的第三点:启动输送链,目测工件移动0.1~0.3 m 时,停止输送链,把机器人末端示教至工件上方,校准针对准工件的特征点,在校准基座选项的第三点上修改位置。这一步也是只针对基坐标系校准,不涉及CountsPerMeter 参数的校准。
第四步,示教校准基坐标系所需的第四点和CountsPerMeter 参数所需的第二点:启动输送链,目测工件移动0.1~0.3 m时,停止输送链,把机器人末端示教至工件上方,校准针对准工件的特征点。在校准基座选项的第四点上修改位置,基坐标系初步校准。切换工件坐标到机器人基坐标,记录示教器上机器人装置当前坐标值,记录示教器上输送链装置坐标值。这一步合并了校准基坐标系所需的第四点和校准CountsPerMeter 参数所需的第二点。
第五步,校准CountsPerMeter 参数:根据第一步和第四步中输送链装置坐标值计算两点间输送链距离,根据上述机器人装置坐标值计算两点间实际距离。由公式CountsPerMeter=输送链距离×初始值/实际距离计算参数,并输入机器人。
第六步,校准基坐标系:调用基坐标系调整程序,根据初校准的基坐标系和修正上述第一到第四步中,机器人末端四次对准工件上的特征点时输送链在校准CountPerMeter 参数后的坐标值,从而确定基坐标系。基坐标系调整程序,可开发成机器人系统例行程序。
4 结束语
通过研究分拣机器人工作站输送链CountsPerMeter 参数和基坐标系校准的方法,合并两步校准的部分操作,精炼了调试操作,克服了必须分别校准的技术偏见。