基于QFT的永磁同步电机伺服系统PID控制器的设计
2021-10-26李浩东何焯毅罗伟维
刘 冬,李浩东,何焯毅,罗伟维
(广东工业大学 自动化学院,广东 广州 510006)
0 引 言
永磁同步电机(PMSM)因其体积小、结构简单、功率因素大、转动惯量小以及易控制等优点广泛应用于数控机床、航空航天、汽车以及机器人等领域[1]。PMSM伺服系统在运行过程中,系统的转动惯量会因环境的改变而发生变化,进而影响伺服系统的控制性能。因此,为了获得良好的控制性能,有必要提升系统的鲁棒性来抑制转动惯量变化给系统带来的不良影响。
当PMSM伺服系统在运行过程中负载转动惯量发生变动时,系统的动态响应会受到影响。当转动惯量增大时,系统加速度会减小,从而使系统的调节时间增大,甚至会出现不稳定现象;转动惯量减小时,系统加速度会增加,而使系统的超调增大,甚至可能会出现振荡现象[1]。传统的PI控制器的参数整定使用的是转动惯量的初始值,并未考虑系统转动惯量发生变化的情况。当伺服系统的转动惯量发生变动时,其控制性能会受到一定的影响。因此,对于伺服系统转动惯量变化这一问题,有必要采取有效可靠的方法来抑制其带来的不良影响。
国内外学者对系统转动惯量变化所带来的影响的抑制提出了许多解决方法,主要有滑模控制[2-3]、自适应控制[4-7]、智能控制[8]和鲁棒控制[9-10]等。文献[2-3]均使用自适应滑模变结构的速度控制方法,通过模型参考自适应系统(MRAS)辨识出系统的转动惯量,然后将辨识后的值应用于滑模控制(SMC)中,增强了系统的鲁棒性,并抑制了惯量扰动的影响。但该方法实现较为复杂,且控制性能与辨识精度有关。在[4-5]中作者通过辨识方法在线辨识转动惯量,然后将辨识后的值给PI控制器,得到了可以依据转动惯量变化在线改变参数的自适应PI控制器,提升了系统的鲁棒性。文献[6]将模糊推理与积分反步控制结合,能够根据转速误差和变化率自调整增益,提高了系统对内部参数摄动的鲁棒性,但该结构复杂,不利于工程实际应用。文献[7]通过梯度下降法在线调整PID控制器的增益,能有效处理系统参数不确定性的问题,但其收敛的快慢对系统的性能有一定的影响。在文献[8]中作者提出了一种基于直接电压控制的自适应径向基函数(RBF)神经网络的控制策略,该方法无需电流控制回路,且对系统参数摄动具有较好的鲁棒性,但该方案的实现过程复杂。文献[9]中利用H∞控制理论设计鲁棒控制器,提升了系统的鲁棒性,但该方法设计复杂,需要一定的理论基础,不利于实际应用。文献[10]将定量反馈理论(QFT)与H∞控制理论结合,有效抑制了转动惯量的扰动,但该方法设计的控制器结构复杂,不适合工程应用。
以上文献实现过程较为复杂或者设计的控制器结构复杂,导致实际应用困难。本文在考虑实际应用的前提下,将系统转动惯量的变化考虑在内,运用QFT,设计性能指标,在Nichols图上合成鲁棒控制器。最后通过仿真以及试验,论述了本文所提方案的有效性和可行性。
1 QFT
1.1 简 介
QFT是由以色列教授Horowitz在20世纪60年代初提出的[11]。起初由于其大量复杂的计算而未受到太多的关注,而后由于计算机和工具包的快速发展才得以广泛应用。
QFT是一种频域的设计方法,将经典控制理论中的频域校正思想推广应用到了对不确定性系统的鲁棒控制率设计,将对象的不确定性用定量的形式在Nichols图上形成边界,进而设计控制器[12]。
基于QFT的控制系统通常为二自由度控制系统,其控制结构如图1所示。

图1 QFT控制系统结构
其中,R(s)、Y(s)和D(s)分别为给定输入、输出和扰动输入信号,F(s)和G(s)分别为预置滤波器和控制器,P(s)为被控对象。
1.2 QFT鲁棒控制器设计步骤
1.2.1 建立标称模板
将控制对象的不确定性考虑在内建立不确定性模型,得控制对象的集合P(s),选取能够表现出对象不确定性的频率集合ω=ωi,(i=1,2,…,n),然后将P(s)绘制于Nichols图中即可得对象模板,取参数变化量的标称值即得标称模板,标称值的选取一般不做特殊要求。特定频率下标称模板的示例如图2所示。
图2中“○”围起来的区域体现出对象的不确定性,该区域越大,不确定性越大。“×”代表选取的标称值,0.5代表所选取的频率值。

图2 Nichols示例
1.2.2 设定性能指标
通过设定期望的性能指标可以获得期望的控制性能。常用的性能指标有鲁棒稳定裕度指标、抗扰动指标以及参考跟踪指标等。
鲁棒稳定裕度指标为

(1)
式中:δ1(ω)为期望的闭环传递函数上限。
通过设定其幅值Ws即可获得期望的幅值裕度Mg和相位裕度Mp,其关系式如下:

(2)
抗输入扰动指标为
(3)
式中:δ2(ω)为输入扰动传递函数的期望上限,既可为常数,亦可传递函数。
传递函数可取:

(4)
式中:ζ2和ωn2分别为阻尼比和自然频率;K2为一次项系数,与扰动幅值的抑制有关,该值越大,对扰动的抑制越弱,反之则越强。
参考跟踪指标包含上边界δup(ω)和下边界δlo(ω),如下:

(5)
其中,上下边界常取标准的二阶系统传递函数,并在上下边界分别加入远离虚轴的零点和极点,以扩大在高频输出的设计范围,上下边界限制分别如下:

(6)

(7)
式中:z和p分别为远离虚轴的零极点;ωn_p和ωn_l分别为上下边界的自然频率;ζp和ζl分别为上下边界的阻尼比,且ζp<1,ζl≥1。
1.2.3 合成性能边界
求解不等式(1)、式(3)和式(5)可得G(s)幅值的取值范围,在-360°~0°之间按比例选取其相位值,与P(s)的幅值相乘、相位相加即可得开环传递函数L(s)的幅值和相位,将该幅值、相位与设定的频率集ωi绘制于Nichols图上可得合成控制器所需的性能边界。
1.2.4 控制器设计
通过给G(s)调整增益、加入零极点等环节,使得开环频率响应曲线在Nichols图中的ωi处高于性能边界即可。
1.2.5 预置滤波器设计
与控制器的设计同理,同样给F(s)添加零极点等环节。若闭环传递函数的Bode图处于参考跟踪指标的Bode图之中,则F(s)设计合理。
2 PID控制器的设计
2.1 性能边界生成
2.1.1 标称模板的建立
PMSM伺服系统双闭环结构如图3所示。
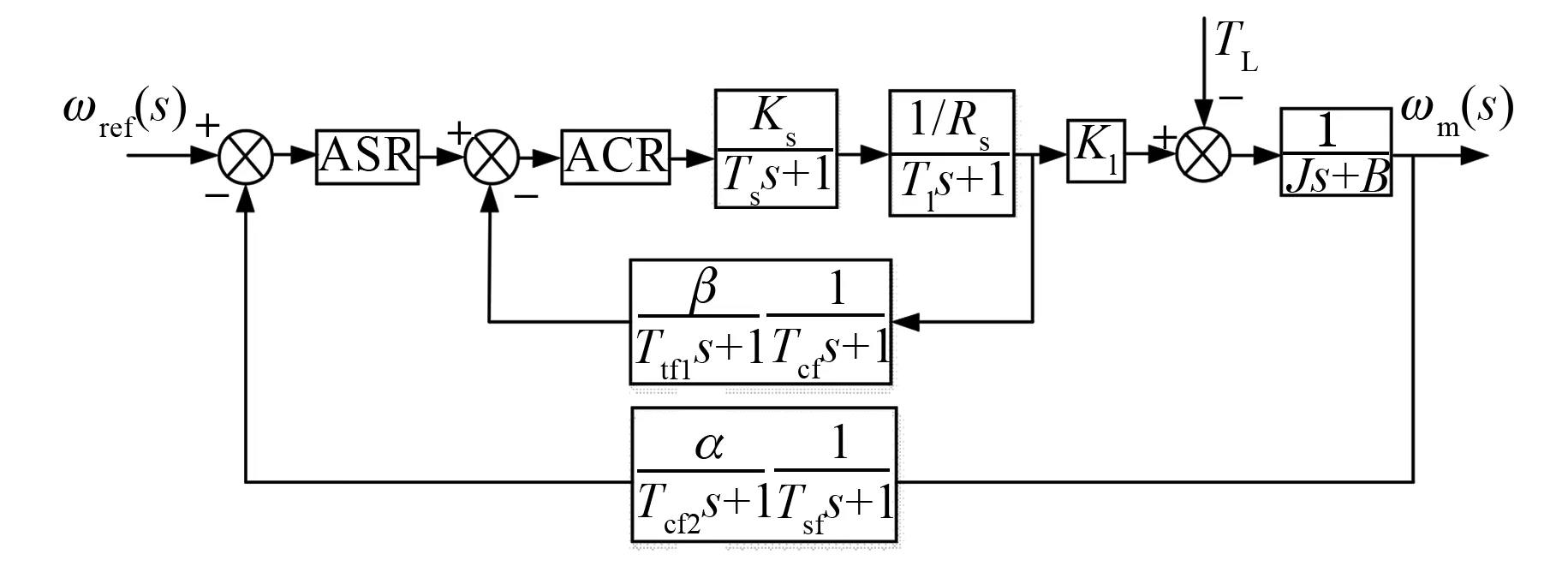
图3 PMSM伺服系统双闭环结构图
其中,ωref(s)和ωm(s)分别为给定和输出转速,ASR为转速控制器,ACR为电流控制器(本文为PI控制器),Ks、Kt、Rs、J、B和TL分别为功率变换器放大倍数、转矩系数、定子电阻、转动惯量、黏滞摩擦系数和负载转矩,Ts、Tl、Ttf1、Ttf2、Tcf和Tsf分别为功率变换器延时时间、电磁时间常数、电流采样延时时间、测速延迟时间、电流滤波时间常数和速度滤波时间常数,α和β分别为速度环反馈系数和电流环反馈系数。
将电流环等效为一阶惯性环节,因此速度环的控制对象为

(8)
式中:T∑n为等效时间常数,T∑n=Ttf2+Tsf+1/KI;KI为电流环增益;系统转动惯量取值为J∈[0.001,0.01],取转动惯量标称值为电机本体转动惯量J0,即J=J0=0.001 25,此时式(8)为标称模型。频率集ωi选取为ωi=[0.1 0.3 0.6 1 4 10 20 50 100 200 500 1 000 2 000]rad/s。
将标称模型与ωi绘制于Nichols即为标称模板,如图4所示。
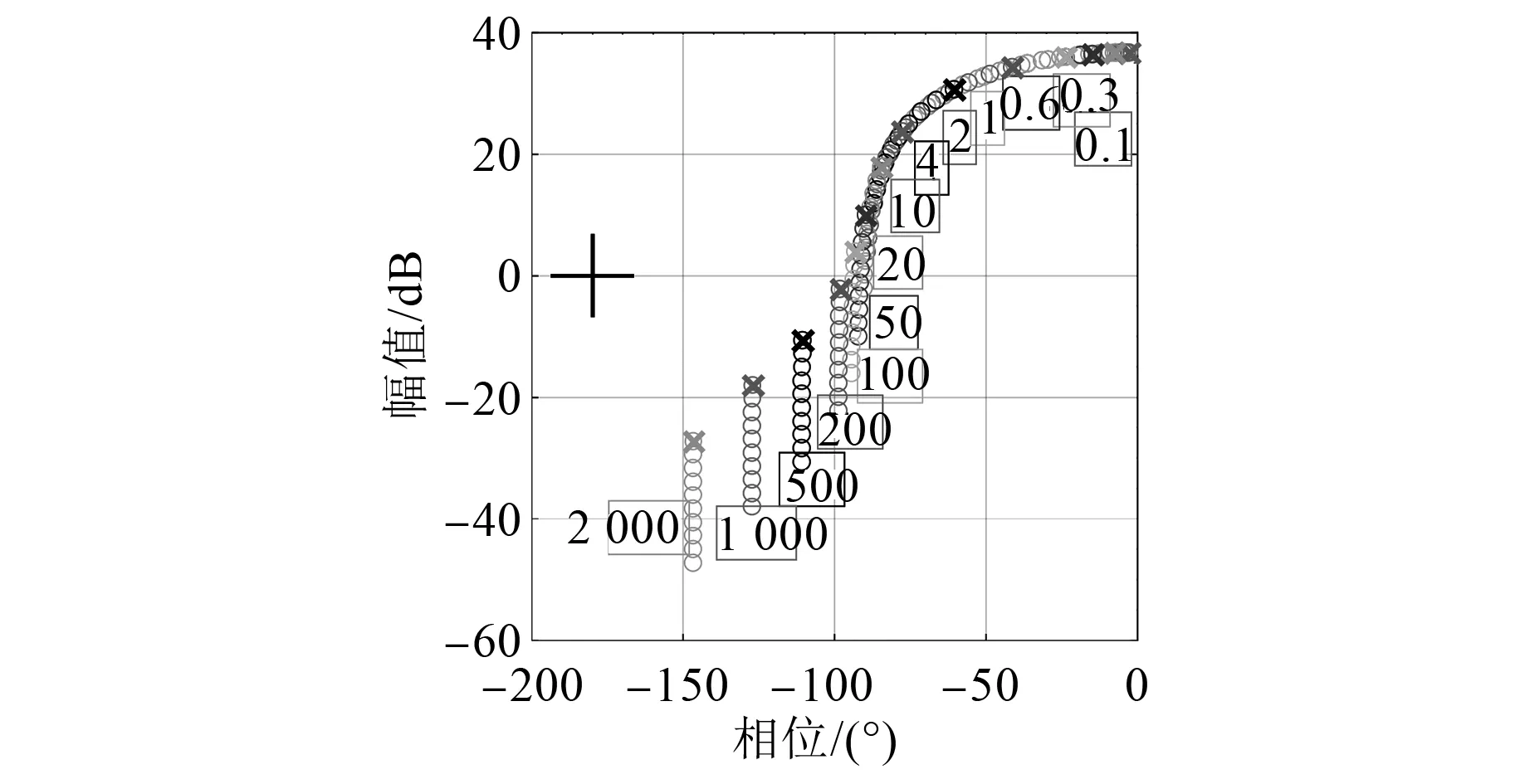
图4 被控对象模板
图4中“○”表示的为被控对象的取值,“×”表示的即为标称模板。
2.1.2 性能指标的选取及边界生成
鲁棒稳定裕度指标及边界。取Ws=1.25,由式(2)可得此时Mp和Mg分别为:Mp=5.105 5,Mg=47.156 4°。该性能指标在Nichols图上生成的边界如图5所示。

图5 鲁棒稳定裕度边界
抗输入扰动指标及边界。取峰值时间tp≤0.005 s,阻尼比ζ2=0.6,单位阶跃扰动输入信号的输出幅值小于0.15,则由式(4)可得:

(9)
该性能指标在Nichols图上生成的边界如图6所示。
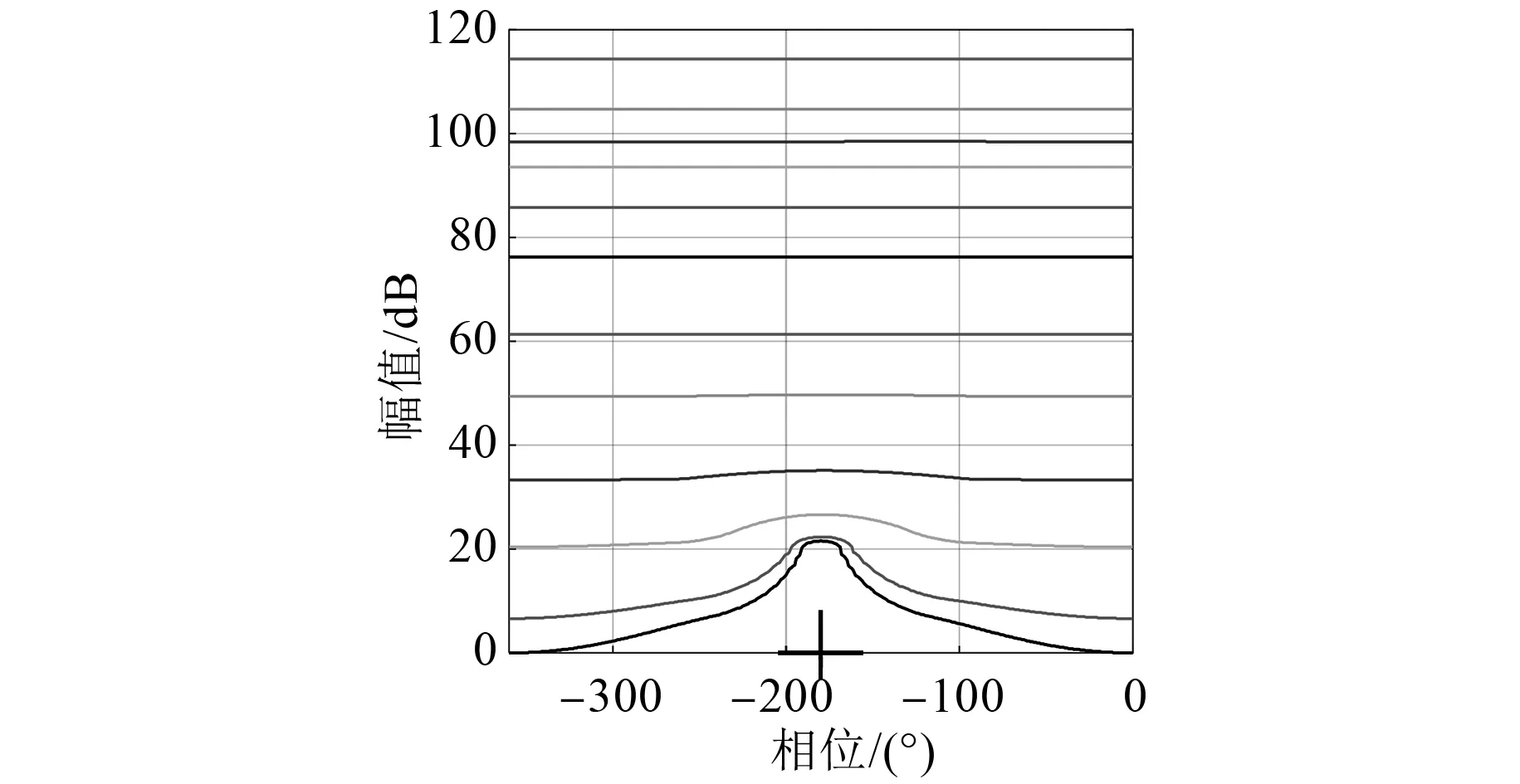
图6 输入扰动抑制边界
参考跟踪指标及边界。上边界,超调量σ≤5%,调节时间ts_u≤0.018 s,零点z=345.745,则由式(6)可得:

(10)
下边界,阻尼比ζl=1.05,调节时间ts_l≤0.05 s,极点p=1 000,则由式(7)可得:

(11)
该性能指标在Nichols图上生成的边界如图7所示。

图7 参考跟踪边界
2.1.3 合成性能边界
本文性能边界以及控制器的合成借助Garcia-Sanz教授及其团队开发的QFT工具箱(QFTCT)[13]。控制器合成的性能边界为图5~图7的交集,边界合成结果如图8所示。

图8 边界合成
2.2 PID控制器的合成
2.2.1 PID控制器结构
PID控制器的一般结构如下:

(12)
式中:e(s)和u(s)分别为输入误差信号和输出控制信号;Kp、Ki和Kd分别为比例系数、积分系数以及微分系数;Tn为滤波时间常数。
式(12)做等效变换,可得:

(13)

因此,由式(13)可知,在合成PID控制器时,只需要给控制器G(s)调整增益K、添加零点z1和z2、极点p以及积分环节1/s即可获得PID控制器。
2.2.2 PID控制器合成步骤
未加入控制器G(s)(或G(s)=1)的开环频率响应曲线L(s)与性能边界的Nichols图如图9所示。
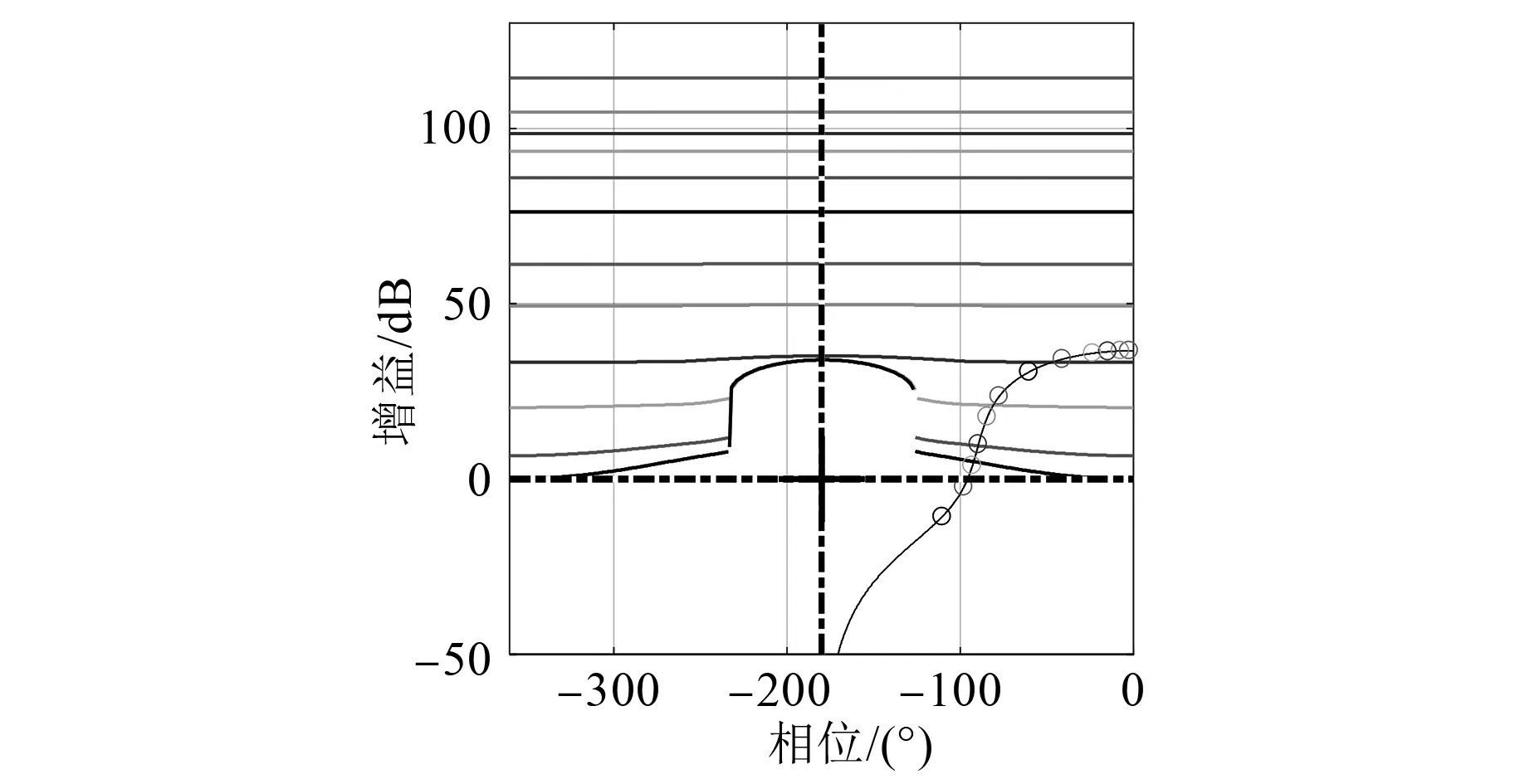
图9 开环频率响应曲线与性能边界Nichols图
基于QFT的PID控制器的合成分为调整增益K、添加积分环节1/s、零点z1、零点z2以及极点p5个环节,其合成步骤如下。
(1)给控制器添加积分环节1/s。
(2)调整控制器增益K,直到L(s)在频率点ωi处高于性能边界。
(3)加入零点z1。零点的加入会增加系统的相位,可以让L(s)向右边移动,且零点较小时主要影响L(s)的低中频,较大时则影响高频。z1取值较小,先满足低中频要求。
(4)加入零点z2。z2取值较大,满足高频要求,且L(s)在高频处不应穿越稳定裕度边界。
(5)加入极点p,给PID控制器增加滤波环节。极点会降低系统的相位,使L(s)向左边移动,p取值通常较大。
PID控制器的设计结果如下:

(14)
图10为PID控制器合成结果。

图10 PID控制器合成结果
2.3 预置滤波器的设计
通过给预置滤波器添加零极点等环节,系统闭环传递函数的Bode图处于参考跟踪指标的Bode图之中,如图11所示。

图11 参考跟踪指标与闭环传递函数Bode图
F(s)的设计结果如下:
(15)
3 仿 真
基于MATLAB/Simulink的仿真平台搭建PMSM伺服系统仿真模型,采用id=0的控制策略,电流环采用PI控制器,电机参数如表1所示。

表1 PMSM参数
给定转速0.24pu(600 r/min),速度控制器采用QFT控制器,系统转动惯量J分别取1倍标称转动惯量J0、3倍标称转动惯量3J0和5倍标称转动惯量5J0时转速波形如图12所示。

图12 不同转动惯量下的转速波形
由图12可知,系统转动惯量取1~5倍的标称惯量时,系统的输出均处于上边界和下边界之间。因此,该控制器设计合理。
当J=5J0时,将QFT速度控制器与速度PI控制器对比,分别采用两者速度控制器的转速波形如图13所示,其他惯量下的转速波形比较如表2所示。
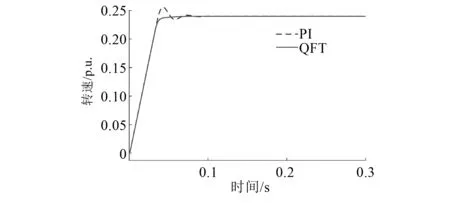
图13 J=5J0时转速比较

表2 不同转动惯量下转速波形比
从图13和表2可知,在加载不同的转动惯量时,基于QFT设计的PID速度控制器相比PI速度控制器具有更小的上升时间和调节时间,且无超调,拥有更好的鲁棒性能。
4 试 验
试验采用GSK公司的130SJT-M075D (A4I)型PMSM(电机参数同表1)、GR2050T型驱动器以及TI公司的TMS320F28377S型DSP处理器搭建PMSM伺服系统的试验平台。PMSM伺服系统平台与惯量台如图14所示。

图14 PMSM试验平台
电流环采用PI控制器,速度控制器使用QFT控制器,采样频率为16 K,给定转速为0.24pu,分别给系统从零加到4个惯量盘(一个惯量盘等于一倍的电机本体惯量)时,系统电流和转速波形分别如图15(a)和图15(b)所示。
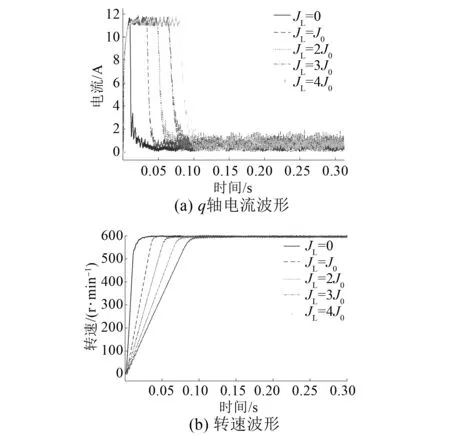
图15 不同转动惯量下的波形比较
图中JL为所加的惯量盘的大小,J0为一个惯量盘的大小。由图15可知,当系统从零增加四个惯量盘时,系统的转速均未产生超调,q轴电流和转速波形的稳态均没有大的波动。可以看出该控制器具有较强的鲁棒性,能够有效抑制转动惯量的扰动。
同样的条件下将QFT速度控制器与PI速度控制器进行比较,其中系统未加惯量盘的转速波形比较如图16所示,加入不同个数惯量盘时的数据情况如表3所示。

图16 未加惯量盘时转速波形比较

表3 不同控制器下的转速波形数据比较
由图16和表3可知,与PI控制器相比,使用QFT速度控制器时系统的上升时间、超调量和调节时间在不同的JL下均要优异,且均未产生超调。由此可知使用QFT速度控制器比使用PI速度控制器的鲁棒性强,对负载转动惯量的扰动具有更好的抑制效果。
将所得结果与文献[14]相比较而言,本文所提方法设计的控制器不仅结构简单、确定,设计目标明确,且具有较强的鲁棒性,更适合工程应用。
5 结 语
本文提出了一种基于QFT的PID控制器设计方法,设计过程不涉及较深的理论,实现过程简单,不仅适用于实际应用,而且能有效改善系统的鲁棒性。最后,在不同的负载转动惯量下进行了仿真和试验,验证了本文所提方法对转动惯量扰动抑制的合理性。此外,还将该方法与传统的PI控制器进行对比,结果表明所提方法的鲁棒性更为优异,对转动惯量扰动的抑制更加明显。
