履带式起重机执行机构型综合及运动学分析
2021-09-013
3
(1.北部湾大学 机械与船舶海洋工程学院, 广西 钦州 535011;2.广西科技大学 机械与交通工程学院, 广西 柳州 545000;3.华南理工大学 机械与汽车工程学院, 广东 广州 510641)
0 引言
履带式起重机是一种采用履带行走驱动机构的动臂旋转式起重机械[1- 4],在船舶修造、港口作业、施工建设等领域发挥了重要作用,传统履带式起重机的执行机构主要由液压传动或齿条螺杆式驱动,且多为单自由度结构,存在加工装配要求高、维护保养成本高、漏油、结构单一、轨迹不灵活且输出无柔性等缺点,已无法满足日益增长的高精度、重载起重作业要求。
机构创新设计[5]的目标就是设计产生符合实际要求的新机构构型,进而打破了传统机构构型设计方法,使选型设计过渡到构型设计。其中一种便是在原型机构的基础上进行创新设计,总结归纳传统机构构型的机构特性,然后采用相应的类型综合方法进行机构运动链的型综合,确定可行的运动链型与之替换,从而产生新型机构[6]。针对平面机构的型综合,张林等[6]利用胚图插点法对九杆内只含单铰转动副的平面闭环两自由度机构进行了型综合研究,设计得到适用于装载作业的可控机构新构型;王汝贵等[7]基于变胞机构概念,设计一种能够在两多自由度和一个单自由度间灵活变换的新型变胞机构。针对空间机构的型综合,蔡敢为等[8-10]提出了面向工作任务的构型约束综合方法,设计了一系列空间可控机构式装载机;李秦川等[11]采用李群李代数理论对三自由度RPR等效并联机构进行了型综合;QU等[12]采用螺旋理论和李群李代数理论对2T1R并联机构进行了型综合。这些研究工作均为履带式起重机起重执行机构的结构设计与理论研究奠定了理论基础和应用参考。以履带式起重机为例,在其功能分析的基础上,基于多自由度可控机构[13]及平面基础闭环子结构进行了机构型综合研究,并对综合出的一种九杆十一副的平面二自由度可控起重机构采用Jacobian矩阵法进行奇异性分析,在有效奇异位形内求解得到其理论可达工作空间,并结合具体工况进行虚拟样机轨迹仿真分析。
1 原始构型及功能分析
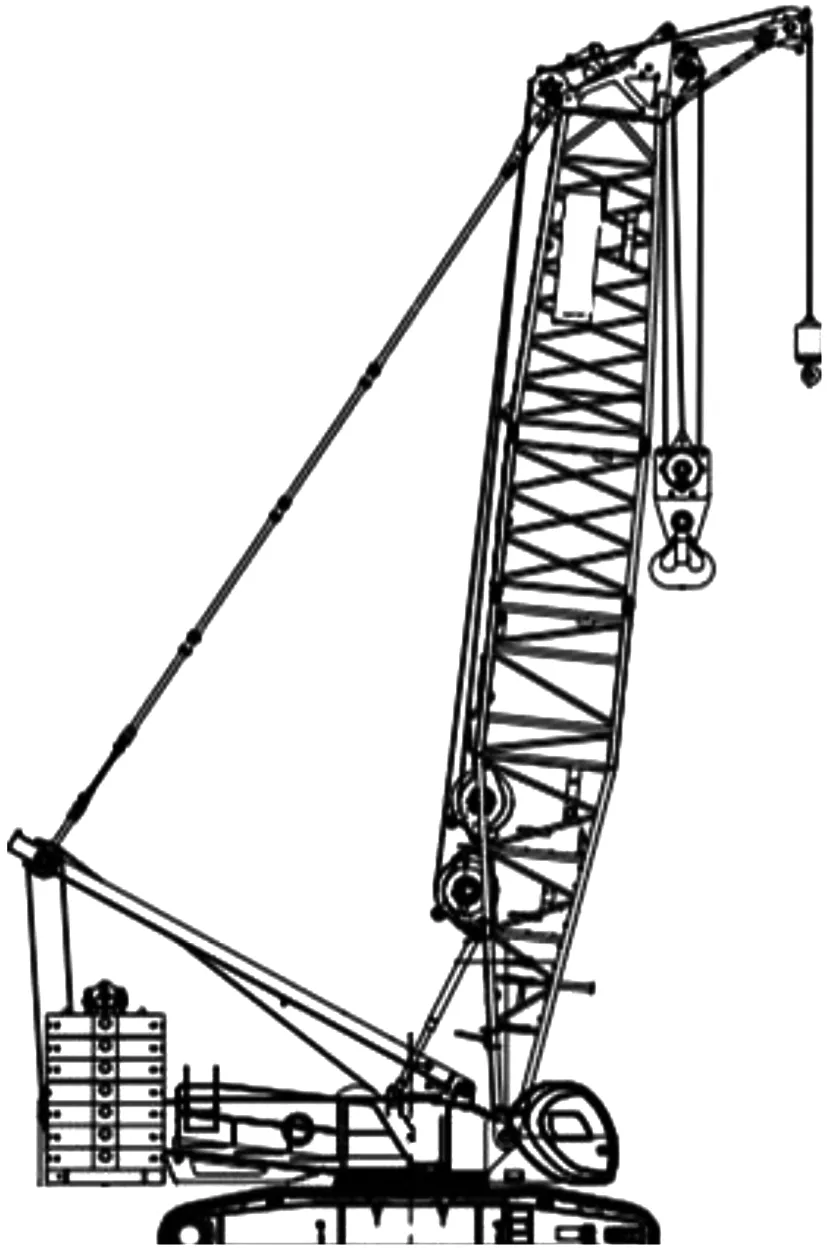
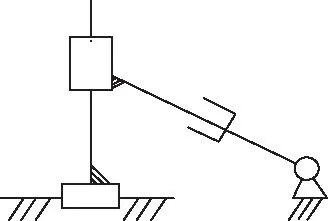
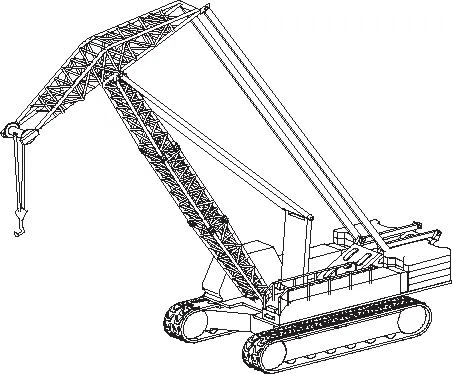
传统履带式起重机构均为液压系统和卷扬系统联合驱动完成任务。如图1所示,主要包括液压系统、提升机构、变幅机构、回转机构以及履带行走机构,变幅机构中的主臂由变幅马达驱动控制起重臂的起臂和落臂动作,顶部安装滑轮组,由卷扬马达驱动可完成吊钩的提升和下降动作,均采用钢丝绳传动方式。
功能分解:①通过履带行走机构行走至工作地点;②通过回转机构旋转起重执行机构至待工作方位;③液压系统供油,变幅马达驱动卷筒,收放钢丝绳调整主臂的前倾和下放;④液压系统供油,卷扬马达驱动卷筒,通过钢丝绳完成吊钩的提升和下降动作;⑤驱动系统联合工作,抬升主臂,提升吊钩,进行货物起吊工作;⑥通过行走机构、回转机构、液压系统和变幅、卷扬马达共同调整,将货物下放至指定地点。
此类履带式起重机过分依赖液压传动,其液压系统存在着零部件加工装配要求高、制造、维护、保养成本高、寿命不长、漏油等缺点,并且,其执行机构只有平面单自由度,轨迹单一,还需配合收放钢丝绳完成定位,无柔性化输出,已无法满足现在多变化、高精度、大范围的起重作业要求。
2 型综合
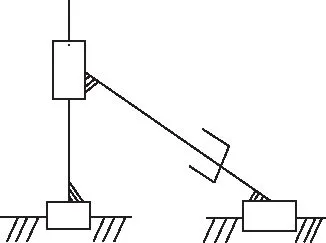
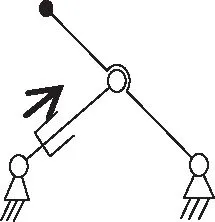
机构型综合是机构设计的重要步骤,也是机械创新设计的核心内容之一。其目的就是针对工程应用场合的工作任务,计算并枚举出可满足拓扑结构学、自由度数、运动学等作业要求的机构构型。在对传统履带式起重机功能分析的基础上,针对具体起重工况,选用转动副(R副)和移动副(P副)进行型综合,可获得机构构型有:4P、1R3P、2R2P、3R1P和4R等5种类型,如图2所示。
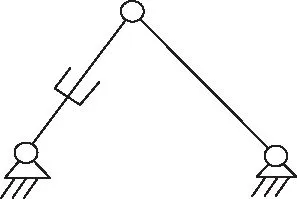
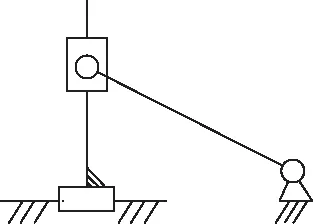
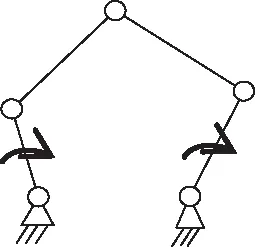
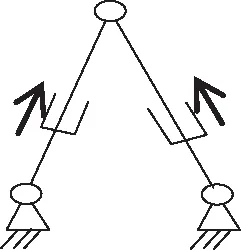
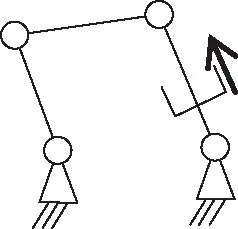
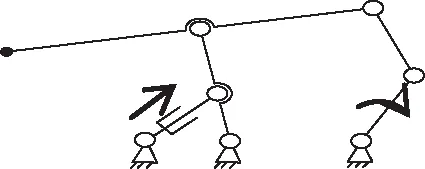
对于不同类型的机构,根据活动关节的连接顺序,可再细分为不同的子结构[14],图3中(a)、(b)、(c)、分别为四杆机构3R1P、2R2P和1R3P类型的部分不同子结构。以4R结构为例,针对典型起重工况采用点输出类型或边输出类型,对闭环子结构进行型综合,如图2(a)、图3(a)、图4(a)、图4(b)所示。对于五杆机构,其运动副种类可分为以下类型,即1R4P、2R3P、3R2P、4R1P和5R类型。改变其运动关节连接顺序,又可获得不同的子结构,同样可将其拓展为以点输出和以边输出两种输出方式,以图5(a)为例,以边输出形式如图5(d)、图5(e)所示。

(a)

(b)

(c)

(d)
(e)
(a)
(b)
(c)
(a)

(b)
(a)
(b)
(c)

(d)

(e)
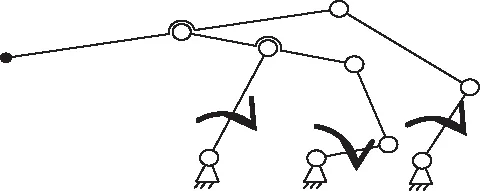
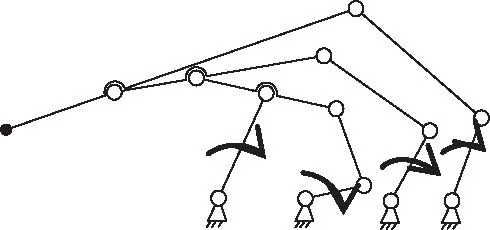
以图5(e)为例对其两驱动单元进行替换,可得到如图6(a)、6(b)所示的二自由度七杆闭链机构构型。在此基础上,使用不同子结构替换其驱动杆件,还可分别得到如图6(c)所示的三自由度八杆闭链机构,如图6(d)和6(e)所示的四自由度十一杆闭链机构,以及如图6(f)所示的四自由度五杆开链机构。
(a)

(b)
(c)
(d)

(e)
(f)
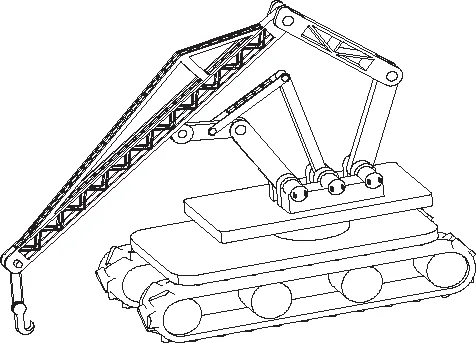
结合履带式起重机实际工作要求,综合考虑驱动构件、尺度和空间布局等因素,将机构各开环、闭环支链和子链的构件等进行零件化设计,可获得基于上述机构构型的新型履带式起重机虚拟样机模型,部分设计出的模型如图7所示。

(a)

(b)
(c)
(d)
3 运动学分析
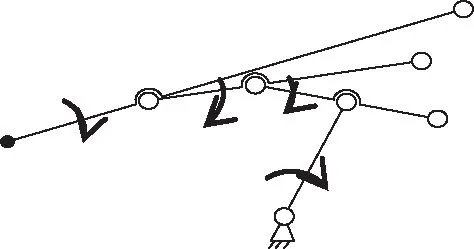
新型履带式起重机构在原始构型上增加了可动副臂结构,执行机构具有多自由度运动功能,末端可实现多轨迹柔性化输出,较传统的履带式起重机构更具稳定性与可靠性,具有更大的工作空间及更高的灵活性。以如图8所示的一种九杆十一副平面二自由度履带式可控起重机构构型为例,对其进行运动学分析。其中A点与E点采用同轴向错开布置,ABCDEA为一闭环五杆机构,分别由机架回转机构上E、I处电机驱动主动杆DE、HI,由闭环连杆组件传动,最终实现末端点J直接到达平面任意位置进行起重作业。
3.1 位置正逆解
如图8所示,GHIFG、ABGFA、ABCDEA分别构成环路T1、T2、T3,采用闭环矢量法[15],根据各杆件的矢量关系,li(i=1,2,…)表示各构件的长度矢量的模,角位置φi表示各矢量以起点为中心并绕逆时针旋转至x轴正方向时转过的角度。在环路T1中由主动杆HI输入角度φ9可求得φ7,环路T2中由φ7可求得φ1,从而得到B点位置坐标,环路T3中由主动杆DE输入角度φ4结合φ1及B点坐标可求得φ2,从而得到末端点J的位置,位置正解分析框图如图9所示。机构的位置正解如下:
(1)
由已知的末端点J位置结合式(1)可求得φ1和φ2及B点位置,结合环路T3可求得主动杆DE的角度输入φ4,结合环路T2可得φ7,进而通过环路T1可得主动杆HI输入角度φ9,完成执行机构的位置逆解。

图8 新型履带式起重执行机构简图Fig.8 Sketch of the novel crawler crane manipulator

图9 位置正解分析框图Fig.9 Forward position analysis block diagram
3.2 奇异性与工作空间
机构处在奇异位形处时会出现某种特殊现象,或处于死点位置无法运动或自由度发生改变或失去稳定,此外还会影响机构的受力状况,损坏机构等[16-17]。为让所设计的机构符合起重作业要求,开展相关奇异性研究尤为重要。本文采用Jacobian矩阵法进行奇异性分析,首先,机构的三环路T1、T2和T3存在以下约束方程:
(2)
(3)
(4)
此外,还存在C点的位置约束方程:
(5)
对公式(2)至公式(4)分别求偏导,对式(5)求微分,可得雅克比矩阵det(J)的行列式:
(6)
当其值为0或∞时,此机构发生奇异的条件为l1和l2、l2和l3、l3和l4、l6和l1、l6和l7、l8和l7、l8和l9其中任意一组共线。考虑起重机作业工程实际,结合机架底座约束给出10种实际可能出现的奇异位形,部分奇异位形如图10所示。
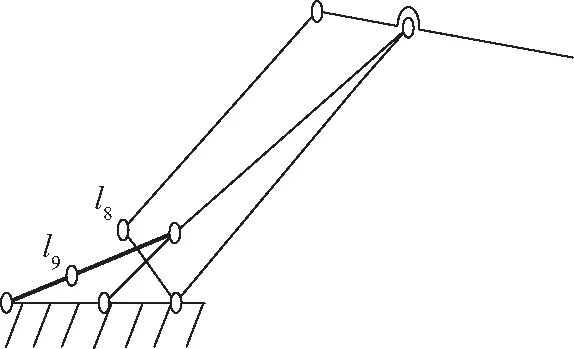
(a) l8、l9拉直
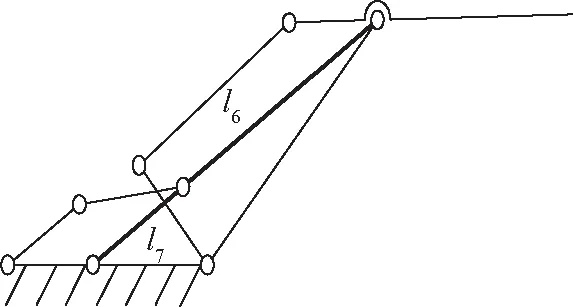
(b) l6、l7拉直

(c) l7、l8拉直
将环路T1和T2位形控制在a、b、c三处范围内即可避免两环路其余奇异位形,在满足机构装配条件下,按照Grashof准则[18]中四杆机构和五杆机构杆长之间的关系,结合在完成典型起重运输作业要求时机构的传动角和压力角等要求,机构尺度参数见表1给定,由环路T3的奇异位形分析可知,只需将其位形控制在l3、l4拉直、l2、l3拉直两处之内,既满足工作需求,又可避免此环路其余奇异位形。考虑到机架底座约束,结合杆长参数,HI杆输入角度φ9的工作区间理论上可在0~180°,并将DE杆输入角度φ4控制在l3、l4拉直、l2、l3拉直两处奇异位形内,计算可得末端执行机构的理论可达工作空间,如图11所示。对比图2和图11可知,传统单自由度履带式起重机轨迹单一,工作范围有限,而新型履带式起重机可以输出柔性化的运动规律,并且具有更大的工作空间。在同等尺度条件下,其横向可达工作范围为2.3~9.8 m,纵向可达工作范围为-4.2~7.8 m。

表1 机构尺度参数Tab.1 Dimensional parameters of the manipulator 单位:mm
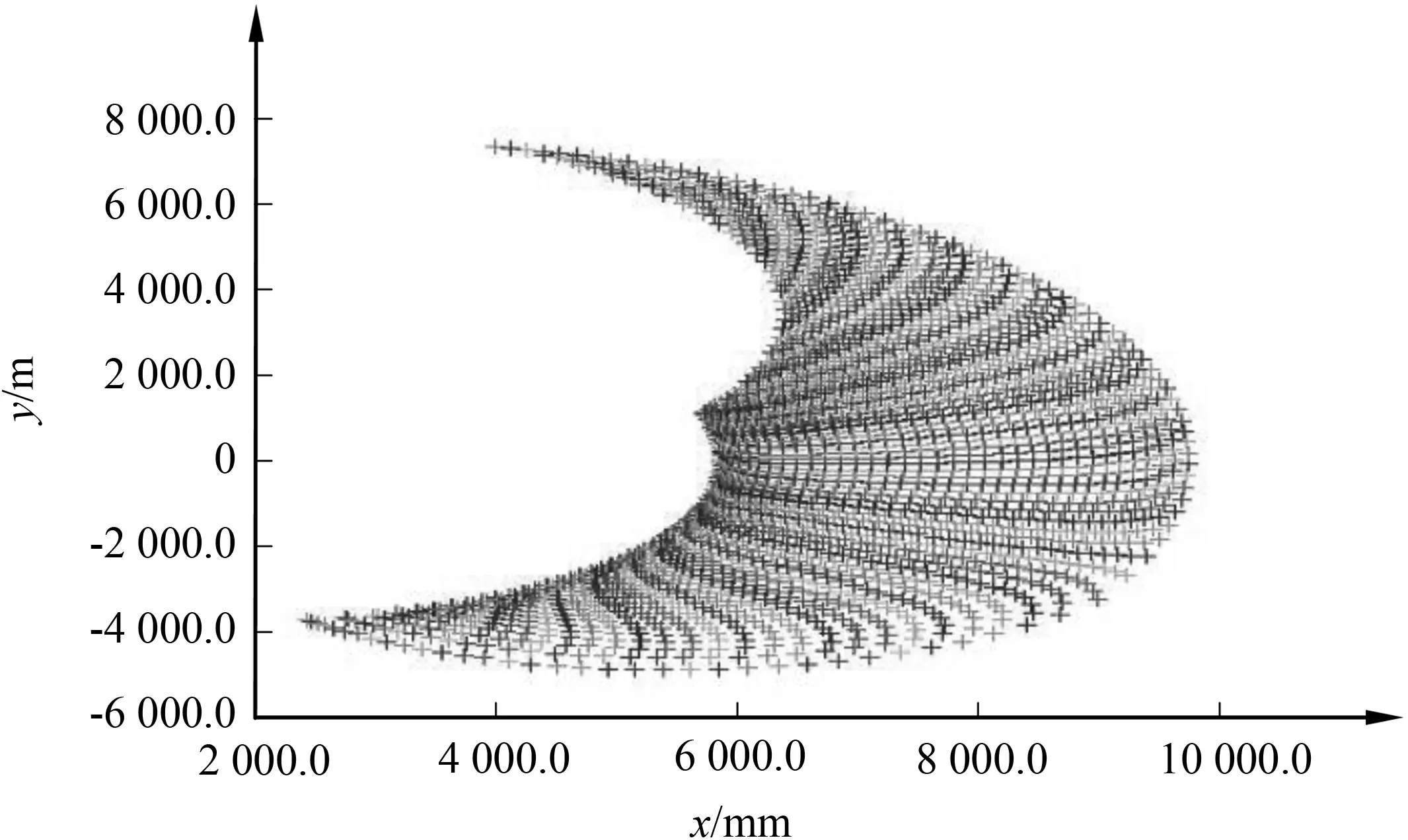
图11 末端执行机构理论可达空间Fig.11 Theoretical reachable workspace of end-effector
4 仿真分析
由上述分析可知联合两电机驱动时,末端执行点可完成实际工作空间内的给定运动,输出轨迹多样,更具柔性化。对机构末端J点施加驱动函数,得到图12所示的轨迹位移、机构末端移动速度和主动件相对角位移变化规律。观察图12(a)可知,在0~48 s时,J点x方向轨迹位移保持不变,48~148 s时,x方向轨迹位移保持平缓增长和降低。在48~75 s、102~125 s时,J点y方向轨迹位移保持不变,0~148 s、75~102 s、125~148 s时,y方向轨迹位移保持平缓增长和降低。由图12(b)可知,0~48 s时,J点x方向的速度为0,y方向速度为0.1 m/s,48~75 s、102~125 s时,J点y方向的速度为0,x方向速度为0.1 m/s。由此可知该执行机构能直接通过末端执行点J以阶段性匀速运动完成工作空间内的各直线轨迹,且各轨迹运动范围较大,末端输出运动灵活多变。由图12(c)可知,在0~48 s、48~102 s时J点x方向和y方向相对角位移增加和降低幅度平缓,由此表明期间两主动杆的相对角位移变化均在工作范围内且整体变化平稳,无剧烈突变情况,机构的整体运动特性能够满足日常所需的起重作业需求,具有实际可行性。
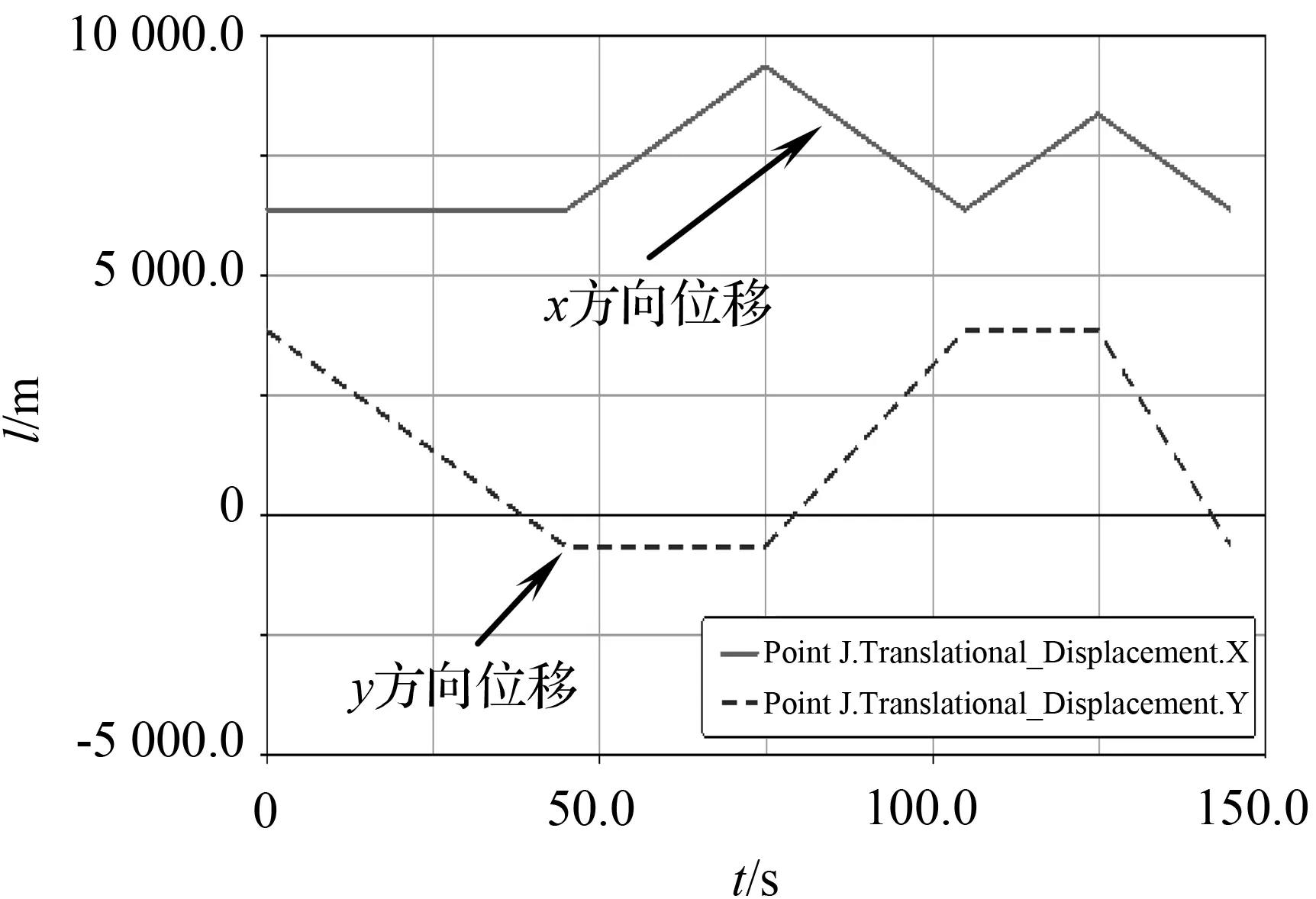
(a) 给定轨迹位移
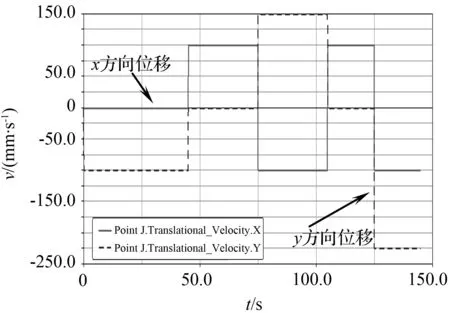
(b) 末端J点移动速度
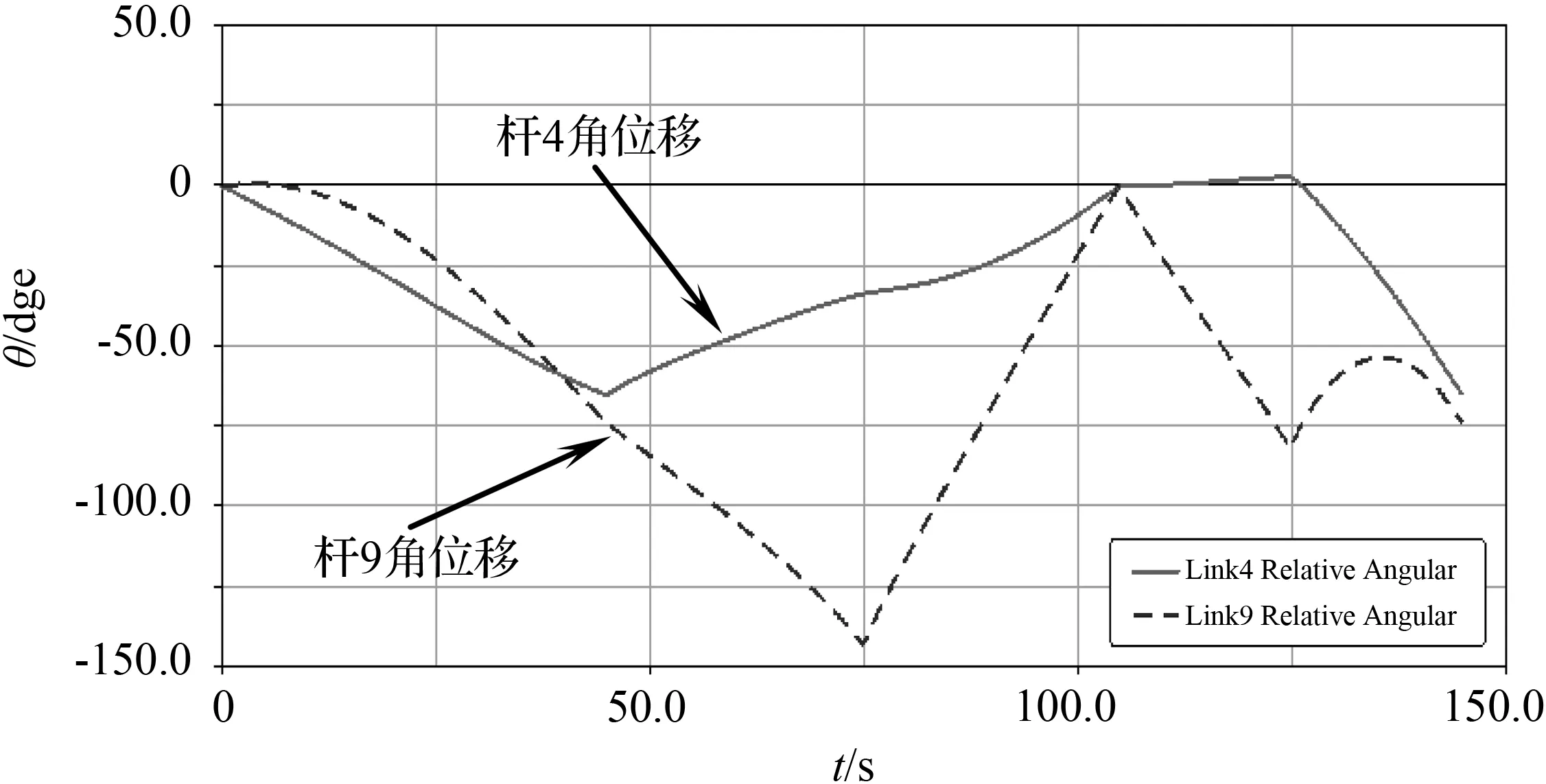
(c) 主动件相对角度位移
5 结论
① 以履带式起重机为例,基于其原始构型及功能分析,结合多自由度可控机构,采用平面基础闭环子结构作为基础驱动单元进行执行机构单一驱动杆件的替换,衍生出一系列新型多自由闭链机构构型,将其具体化获得了一类新型多自由度闭链式结构履带式起重机。基于此类快速成型法,亦可将新型多自由度闭链式机构作为新的驱动单元进行复杂并联机构的构型综合与设计。
② 以综合出的一种九杆十一副二自由度履带式起重机机构为例,采用Jacobian矩阵法对执行机构进行了奇异位形分析,将其控制在有效奇异位形内进行工作,结合数值算例,得到了理论可达工作空间。
③ 给出了具体运动轨迹,进行了执行机构的正、逆向运动学仿真分析。结果表明该执行机构不仅能完成常规起吊动作轨迹,还能实现连续变化的特殊工作路径,具有多轨迹灵活输出的功能。相关运动轨迹与运动规律可为此类变幅机构的进一步研究分析奠定基础,也可为其他工程机械的创新设计研究提供参考。
