一种特殊X型机器人点焊钳设计
2021-07-12余星星
余星星
(捷福装备(武汉)股份有限公司,湖北 武汉 430000)
汽车白车身生产线3D仿真设计时,工件和夹具的断面多种多样,常规焊钳经常无法满足特殊断面的焊接需求,因此需更改钳体结构,设计特殊焊钳以保证焊钳通过性。下文详细介绍了特殊X钳的总体设计及校核过程,通过理论计算及软件模拟,详细分析了焊钳的性能参数,为项目应用提供了有效的解决方案。
1 特殊X钳的总体设计
图1是一种典型的特殊断面结构,采用常规X钳仿真时,无法布局,焊钳尾部与工件严重干涉,仅通过修改焊钳前端的钳臂结构无法满足通过性。在实际项目应用中,通过改变焊钳的整体布局,将钳体的水平布置改为特殊的垂直布置,可很好解决此问题,见图2。在完成初步的尺寸设计后,还需要通过详细的校核,才能确保设计的合理性。
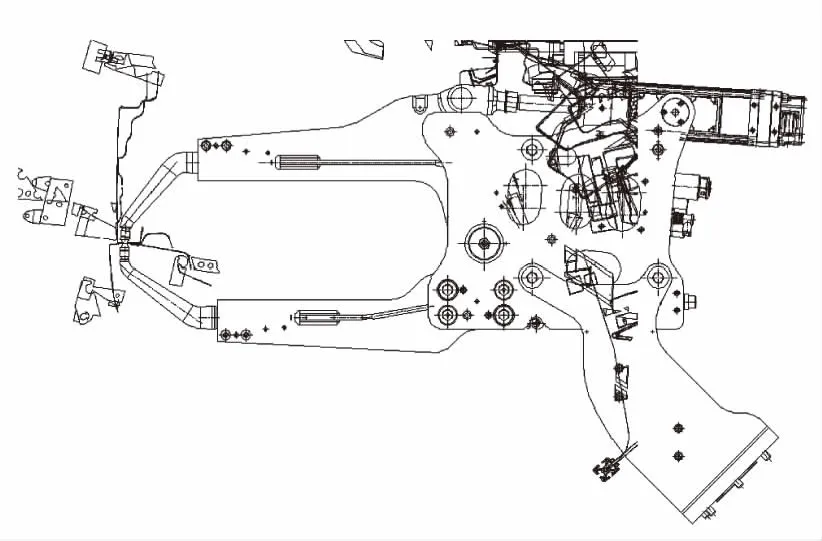
图1 常规X钳布局示意图

图2 特殊X钳布局示意图
2 特殊X钳的性能校核
2.1 校核电机最大推力
焊钳的驱动部件由直线伺服电机等组成,为焊钳提供焊接压力,并通过电极臂由电极帽传递到工件上。通常X型焊钳直线伺服电机最大推力为21 kN,白车身常规点焊[1]工艺焊接压力一般在5000 N以内,按照焊钳喉深1000 mm校核电机推力。
电机所需推力:
其中:L1为旋转中心到焊点的垂直距离,L1=1000 mm;L2为旋转中心与电机输出轴的垂直距离,L2=265.5 mm;F为电极帽输出压力,F=5000 N,
经计算:
P=18832.39 N
电机所需推力小于电机最大推力,说明电机满足要求。
2.2 校核电极帽在全行程中的速度波动量
X钳的行程由动臂最大可开启的角度来衡量,此特殊X钳的设计行程15度,根据图3计算全行程中的电极帽线速度波动量。

图3 电机推力计算示意图
速度波动量:
其中:a1为焊钳闭合时转动点到电机轴的垂直距离,a1=265.5mm;a2为焊钳打开时转动点到电机轴的垂直距离,a2=239.8mm。
经计算:
i0=9.7%
电极帽线速度波动量没有特定要求,也不会对焊钳的使用造成明显影响,只是理论上来讲越小越好,从工程经验来看,10%是完全可以接受的。
2.3 校核动、静臂电极帽在修磨过程中的水平偏移量
焊钳在使用时,每焊接一定数量的焊点,需要修磨一次电极帽,电极帽的修磨量通常为单侧8 mm左右,通过cad模拟修磨量,可以确定动、静臂电极帽的偏移量,如图4。

图4 修磨时的电极帽偏移量示意图
对于此特殊焊钳,修磨时的电极帽偏移量与常规焊钳一致,取决于电极帽到动臂转动中心的水平距离L4,以及电极帽偏离角度θ,从图4可知,在L4为450 mm,θ为5度时,偏移量k0为1.3 mm,满足要求,工程应用中控制偏离角度不超过5度即可。
2.4 校核动臂软连接行程
作为通用设备,统一不同系列产品中的核心备件型号,减少备件种类是一项关键工作,既可提高设备厂的生产效率,也可降低客户的备件成本。此特殊X钳需沿用常规X钳的动臂软连接型号,因安装形式变化,需重新校核其连接行程。动臂软连接结构及动作过程如图5。
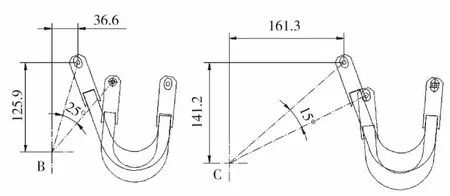
图5 软连接动作过程示意图
图5中左侧是常规X钳的动作过程,焊钳打开25度,B点为转动点;右侧是此特殊X钳的打开过程,焊钳打开15度,C点为转动点。显然,软连接的运动形态发生了明显变化,需要重新采用几何方法计算,找出新形态的理论解,计算的边界条件是软连接内外侧的长度不变。实际中采用catia软件的草图功能,进行函数运算[3],可直观形象地得到软连接的实际形态,如果catia草图在此过程中出现内部边界交叉,则说明软连接行程不够。图5清晰地给出了软连接的新形态,说明此特殊X钳打开15度时,软连接行程足够。
2.5 焊钳的整体变形校核
在完成钳臂参数校核后,还需计算钳臂的变形量[4],以验证焊钳钳臂布局的合理性。下面以一汽集团某一项目所应用的一把特殊X钳为例,通过CAE软件计算钳臂的总体变形量。
采用有限元软件ANSYS Workbench,使用实体单元[5],在电极帽处加载4000 N压力,计算钳臂受力变形,求解后得到的电极帽轴向位移云图见图6,电极帽轴向最大位移为0.9 mm。

图6 电极帽轴向位移云图
求解后得到的电极帽径向位移云图见图7,动臂电极帽径向最大位移为-1.41 mm,静臂电极帽径向最大位移为-1.17 mm,相对位移为0.24 mm。

图7 电极帽径向位移云图
焊钳设计中,电极帽的位移通常轴向不超过3~5 mm,径向不超过1.5 mm,相对位移不超过0.5 mm,以上计算结果满足此要求,说明此特殊X钳钳臂的布局合理。
通过此节分析,可认为此特殊X钳,在喉深1000 mm以下,焊接压力5000 N以内,最大行程不超过15度时,完全可满足设计要求,可以在实际项目中进行应用。
3 结束语
机器人焊钳3D设计主要是在焊钳自身可靠的情况下满足仿真通过性,而钳体布局的合理性,决定了钳臂设计的合理性,好的钳体要求整体结构协调,钳臂结构简单,电机输出力能满足不同焊接情况下的压力需求,并且电极帽速度平稳,波动小,电极帽相对滑移容易控制,备件型号少。本文介绍的一种特殊X型钳体,有效的解决了该特殊断面的焊接需求,在实际项目中也得到了验证,是一个很好的设计案例。
