无刷力矩电机零位设计技术研究
2021-07-12尹胜利江晓波杨光力
尹胜利,江晓波,杨光力,卓 亮
(1.贵州航天林泉电机有限公司,贵州 贵阳 550000;2.空装驻贵阳地区第一军事代表室,贵州 贵阳 550000;3.国家精密微特电机工程技术研究中心,贵州 贵阳 550000)
0 引言
永磁无刷力矩电机具有输出力矩大、过载能力强、运行平稳、伺服控制性能好的特点,广泛应用在机器人、机床、阀门、卫星转台、雷达导向等需要高精度位置或角度调节的伺服系统中[1]。永磁无刷力矩电机的转子磁极中心线与定子的某相磁势中心线对齐时的位置即为无刷力矩电机零位,永磁无刷力矩电机要可靠起动,必须要精确确定其零位,从而根据零位确定反馈元件的安装角度。理论上零位数量与其极数相同,在生产制造过程中,为了便于识别零位位置和安装位置感应元件,通常以电机定子圆周某点为基准确定一个唯一的零位位置。零位可以采用测试的方法确定,但其测试难度高,测量误差大,例如分装式的无刷力矩电机,若采用测试法,需要制造专门的测试工装,安装定子和转子,同时由于定子和转子之间可标记的位置空间小,难以在规定的位置精确标记出电机的零位线。另外,电机处于通电状态,对测试人员的安全存在一定的隐患。
在电机零位设计研究方面,张帅[2]提出利用直流通电方式寻找电机零点的方法,并给出旋变结构的设计意见。刘红伟等[3]探析了初始零位误差对采用Id=0控制策略的表面正弦波永磁同步电机双闭环调速系统的影响。胡任之等[4]分析了位置传感器零位偏差对转矩模型的影响。张树林等[5]提出基于电机线电感基波分量与二次谐波分量的转子初始位置计算方法。陈程等[6]结合变频器电压脉冲激励信号与开路电感值,实现转子初始位置的推算及在线检测。
针对永磁无刷力矩电机零位确定多采用试验方法的现状,本文采用有限元仿真研究永磁无刷力矩电机的零位设计方法,以实现对永磁无刷力矩电机定子和转子之间零位确定方法的研究,得到了基于有限元精确确定电机定子和转子零位的方法,并通过实测验证了该方法的有效性,本文设计方法可实现永磁无刷力矩电机零位的正向设计,具备一定的工程应用价值。
1 永磁无刷力矩电机零位分析
以38极36槽的分装式永磁无刷力矩电机为例,其定子和转子结构分别如图1和图2所示,将定子槽进行逆时针方向编号,根据电机安装的位置要求,电机的定子零位需要设计在1号槽和36号槽之间齿的中心线上,同样将转子的磁钢按逆时针方向进行编号,N极磁钢和S极磁钢的位置交替分布,转子的零位需要设计在1号磁钢(N极)与38号磁钢(S极)之间的磁轭中心线上。当A相通正电,B、C相通负电时,电机的定子和转子的零位线在水平中心线对齐。
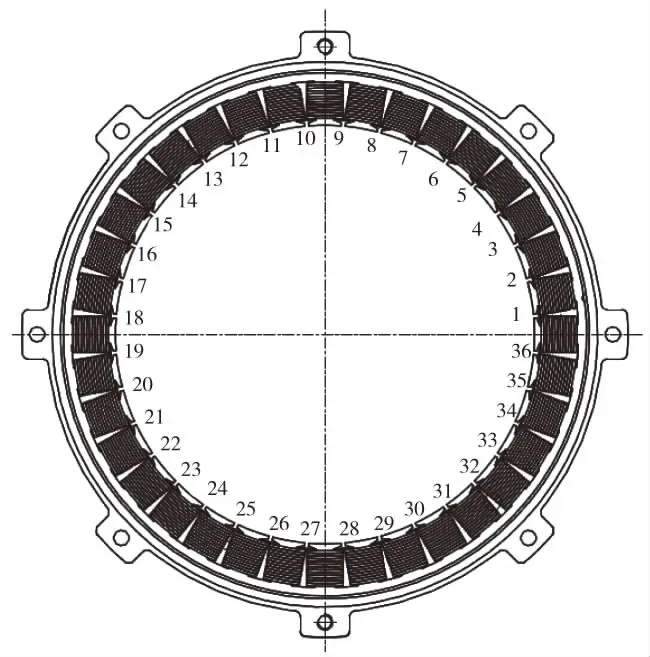
图1 永磁无刷力矩电机的定子结构图

图2 永磁无刷力矩电机的转子磁极关系图
2 永磁无刷力矩电机的建模与仿真
2.1 电机的建模
以一台38极36槽的永磁无刷力矩电机为研究对象,其主要参数见表1。
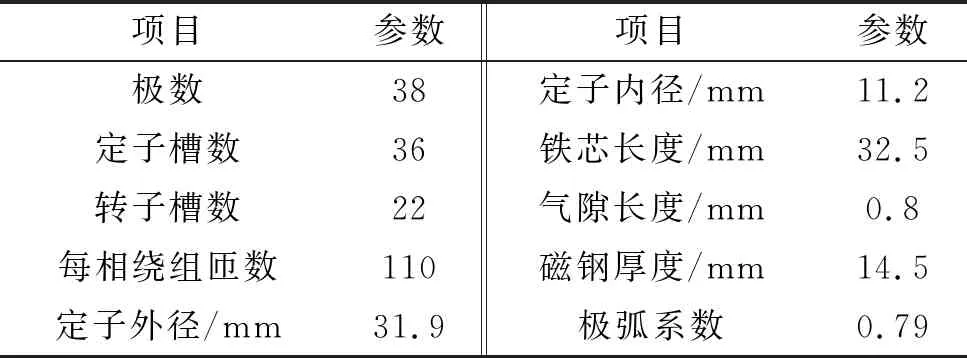
表1 永磁无刷力矩电机的主要参数
在ANSOFT Maxwell中建立永磁无刷力矩电机的二维有限元全周期分析模型如图3所示。定子永磁绕组分别用红色、黄色、绿色表示,转子N极磁钢用蓝色表示,S极磁钢用青色表示。
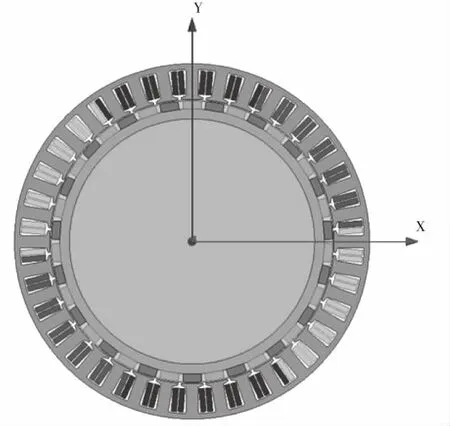
图3 电机的有限元模型
永磁无刷力矩电机的仿真模型建立以后,根据无刷力矩电机零位的定义,对电机的定子永磁绕组施加直流电流激励,A相通+5A,B相和C相通-5A,以定子的预定零位为基准,仿真转子的零位线位置,仿真流程如图4所示,仿真定子和转子的定位转矩,得到其过零点的位置角度,转子逆时针方向旋转对应的过零点位置角度,即获得转子S极和N极磁钢的零位。
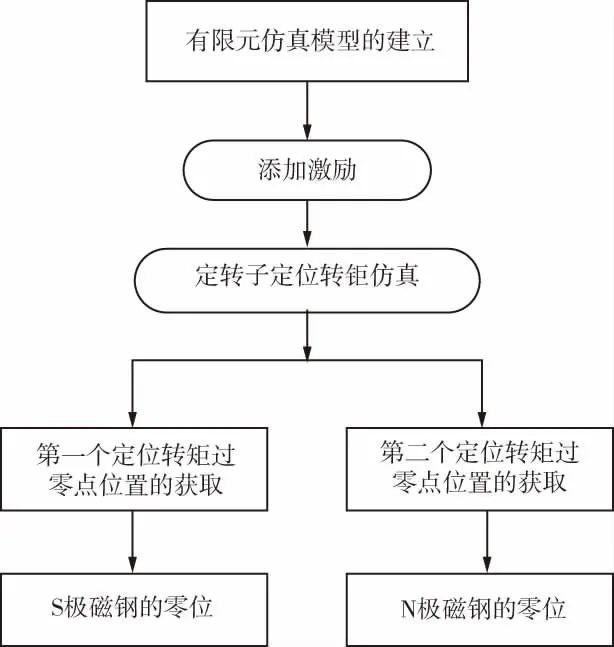
图4 仿真分析流程
2.2 零位仿真分析
图6中的位置为永磁无刷力矩电机定子和转子的初始位置,设置初始位置角度为0°,转速为1°/s,在一个周期45 s内运行,经过仿真得到定子和转子的定位力矩变化曲线,如图5所示, 可看出在一个旋转周期范围内,定转子的定位力矩两次出现过零点,第一个过零点的位置角度为6.58°,第二个过零点的为16.06°,两个过零点角度分别是S极磁钢和N极磁钢零位线的位置角度。

图5 定子和转子定位力矩变化曲线
当转子从初始位置逆时针转过6.58°后,定子和转子的位置如图6所示,S极磁钢在X正方向与定子预定零位线对齐,该位置点即为S极磁钢的零位线位置。当转子从初始位置逆时针转过16.06°后,定子和转子的位置如图7所示,N极磁钢在X正方向与定子预定零位线对齐,该位置点即为N极磁钢的零位线位置。38极36槽永磁无刷力矩电机共有38个零位位置,S极磁钢和N极磁钢的零位在图6和图7的位置上重复交替分布。

图6 电机S极磁钢零位线位置
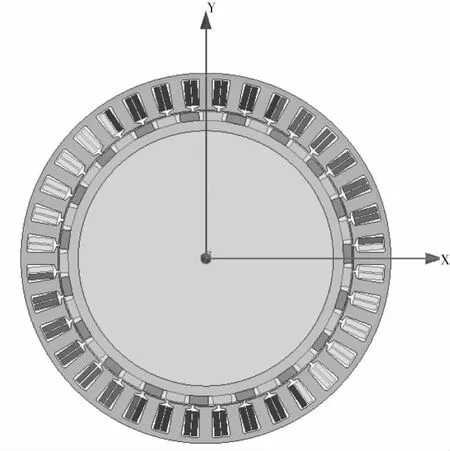
图7 电机N极磁钢零位线位置
3 试验验证
本文以一台38极36槽样机进行了定子和转子的零位测试,样机的转子上以刻线的方式标记出仿真的S极磁钢零位线和N极磁钢零位线,定子的零位线已预先设定,通过实验测试验证有限元法确定永磁无刷力矩电机零位的准确性和精度,从而为精确确定永磁无刷力矩电机零位提供设计依据。图 8为样机的定子和转子,图 9为样机零位的实测位置。
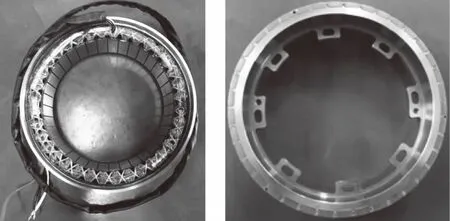
图8 试验样机的定子和转子
根据零位检测法,给样机的A相绕组施加+5A,B相和C相连接一起施加-5A的直流电流,且使转子S极零位线与定子零位线的夹角在一个较小角度范围内,此位置定义为定子和转子的初始位置,通电后,转子从初始位置转过一定的角度,定子和转子的相对位置稳定后,观察到转子的S极磁钢零位线与定子的零位线完全对齐,如图 9所示。断电后,重新调整初始位置,使转子N极磁钢零位线与定子零位线的夹角在一个较小角度范围内,再次通电,转子从初始位置转过一定的角度,定子和转子的相对位置固定后,观察到转子的N极零位线与定子的零位线完全对齐。试验结果说明,永磁无刷力矩电机通过有限元仿真方法确定的零位精度极高,完全能满足电机可靠起动对定子和转子零位偏差高精度的要求。

图9 样机S极磁钢零位线位置
4 结论
本文针对永磁无刷力矩电机零位确定方法进行了研究,提出了基于有限元精确确定永磁无刷力矩电机零位的方法,利用ANSOFT Maxwell对电机在直流电流激励下,定子和转子的定位转矩进行仿真和计算,分别得到了电机转子N极磁钢和S极磁钢的零位位置,并通过研制样机进行了试验验证,得到以下结论:
1)永磁无刷力矩电机的转子零位数量与电机的极数相同,仅存在N极和S极两种不同角度的零位,电机所有零位在定子圆周上中心对称、交替分布;
2)本文所采用的基于有限元分析永磁无刷力矩电机零位的方法准确,得到的零位角度精度高,实验测试结果与仿真结果的符合性达到97%以上。可以将此种仿真分析方法推广到永磁无刷力矩电机零位的设计中,对提高永磁无刷力矩电机的零位精度有较强的参考意义。
