基于对数型滑模面分数阶Rucklidge系统的自适应滑模同步
2021-05-26范贺花周永卫雷腾飞毛北行
范贺花, 周永卫, 雷腾飞, 毛北行
(1. 郑州航空工业管理学院 数学学院, 郑州 450015; 2. 齐鲁理工学院 机电工程学院, 济南 250200)
混沌系统及其同步已引起人们广泛关注, 滑模方法对未知系统及不确定参数具有极强的鲁棒性. 目前, 针对非线性系统的滑模同步已取得较多的研究成果[1-19]: 文献[11]研究了Newton-Leipnik不确定分数阶混沌系统滑模同步的两个设计方案, 给出了滑模和积分滑模两种滑模控制技巧; 文献[12]研究了不确定分数阶混沌系统的终端滑模同步; 文献[13]研究了不确定Sprott混沌系统的自适应滑模同步, 设计了控制律和适应规则; 文献[14]研究了一类时滞不确定分数阶金融混沌系统的滑模同步, 给出了滑模函数的构造; 文献[15]构造了一类纠缠混沌系统并研究了比例积分滑模同步问题; 文献[16]研究了Rucklidge混沌现象的演示器设计; 文献[17]研究了分数阶Rucklidge混沌系统的同步控制; 文献[18]研究了Rucklidge系统的同步及其在保密通信中的应用; 文献[19]研究了Rucklidge混沌系统的分岔与电路实现. 由于引入分数阶微积分, 因此使分数阶系统建模时更符合工程实际要求, 应用滑模方法可使系统具有良好的鲁棒性能, 由于实际系统均需考虑模型的不确定及外部扰动的影响, 且针对分数阶不确定Rucklidge混沌系统设计滑模控制的研究较少, 因此本文通过设计对数型滑模面研究不确定分数阶Rucklidge混沌系统的自适应滑模同步, 得到了不确定分数阶和整数阶Rucklidge系统滑模同步的两个充分条件.
1 主要结果
定义1[19]分数阶α阶导数Caputo定义为

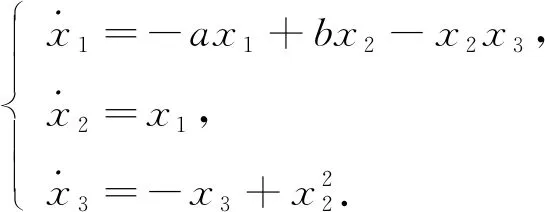
分数阶不确定Rucklidge系统[17]可描述为

(1)
当a=-2,b=6.7,q=0.978时, 系统(1)的吸引子如图1所示.
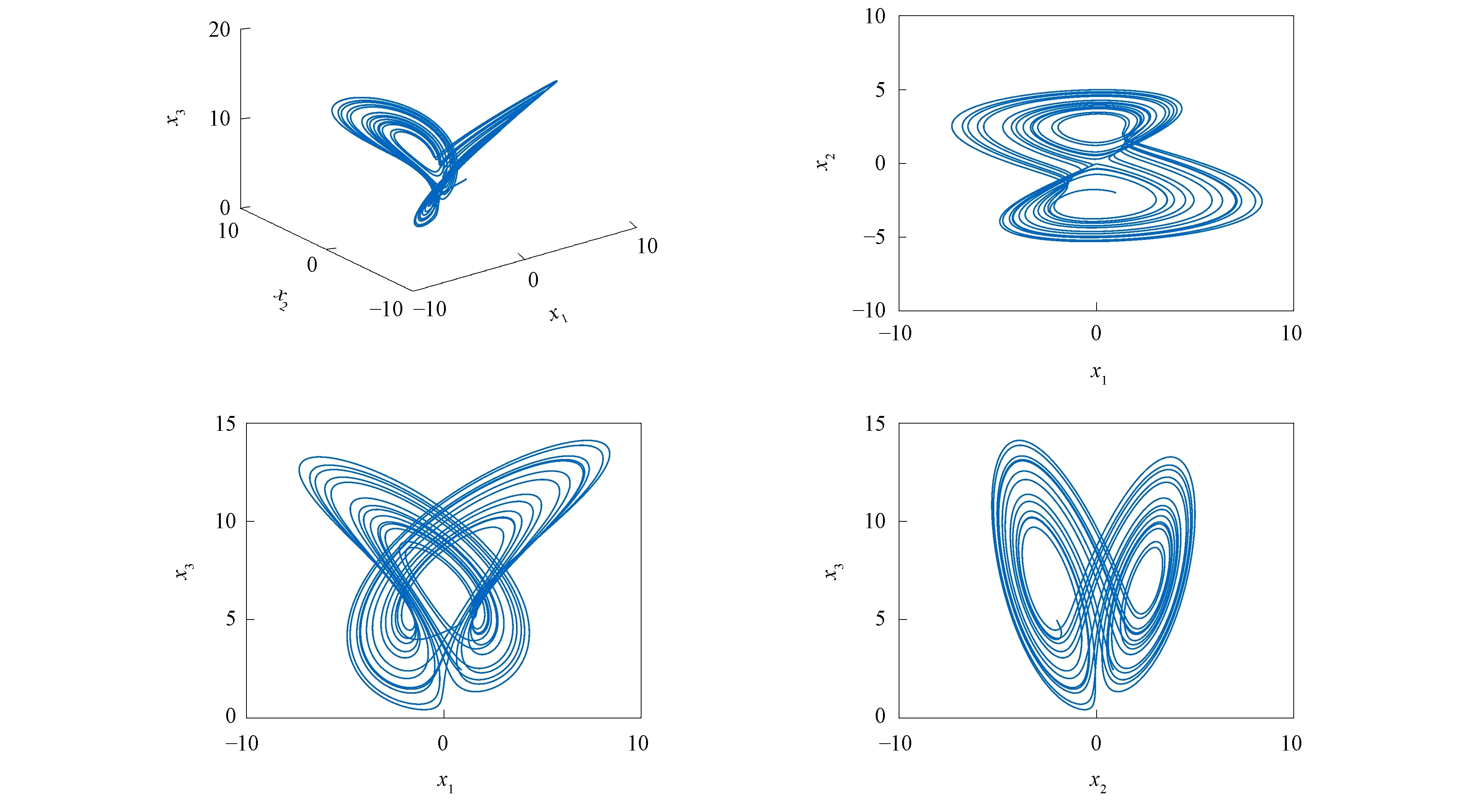
图1 系统(1)的混沌吸引子
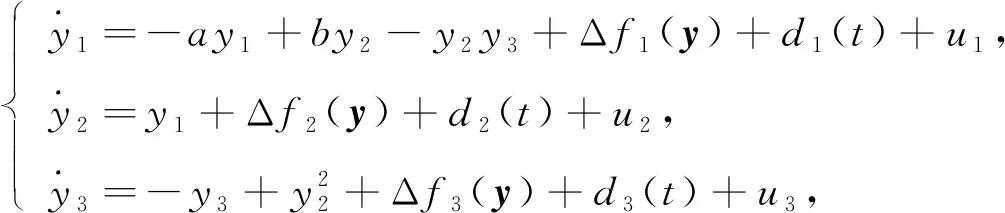
以系统(1)为主系统, 设计从系统为

(2)


(3)
假设1设不确定项Δfi(y)和外部扰动di(t)有界, 即存在未知参数ki>0, 使得
|Δfi(y)+di(t)| 引理1[20]若x(t)为连续可微函数, 则对∀t≥t0, 有 定理1在假设1条件下, 设计滑模面si(t)=ln|1+ei(t)|, 控制律为 (4) 自适应律为 (5) 不在滑模面上时, 设计 (6) 其中|1+ei(t)|=(1+ei(t))sgn(1+ei(t))=esi(t), e为无理数. 考虑整数阶不确定Rucklidge系统 (7) 以系统(7)为主系统, 设计从系统为 (8) 其中Δfi(y)为系统的不确定项,di(t)为有界的外部扰动,ui为控制律, 定义ei(t)=yi(t)-xi(t), 从而 (9) 定理2在假设1条件下, 设计滑模面si(t)=ln|1+ei(t)|, 控制律为 (10) 自适应律为 (11) 对式(12)两边积分可得 利用引理3可得si(t)→0, 从而ei(t)→0. 用MATLAB进行数值仿真. 参数为a=-2,b=6.7,q=0.978, 初始值设为(x1(0),x2(0),x3(0))=(0.5,0.2,0.8), (y1(0),y2(0),y3(0))=(0.4,0.6,0.2), Δf1(y)=0.5cos(2πy1), Δf2(y)=0.6cos(2πy2), Δf3(y)=0.5cos(2πy3). 有界外部扰动d1(t)=0.5cos(t),d2(t)=0.4sin(t),d3(t)=0.5cos(2t). 定理1和定理2中系统参数分别为 在假设1条件下, 设计滑模面si(t)=ln|1+ei(t)|, 控制律为式(4), 自适应律为式(5). 在假设1条件下, 设计滑模面si(t)=ln|1+ei(t)|, 控制律为式(10), 自适应律为式(11). 图2 定理1中的系统误差曲线 定理1和定理2中的系统误差曲线分别如图2和图3所示. 由图2和图3可见, 系统误差在初始时相差较大, 且距原点较远, 一段时间后逐渐趋近于坐标原点. 定理1和定理2中滑模函数的变化曲线分别如图4和图5所示. 由图4和图5可见, 对数型滑模面比其他滑模面趋近原点的速率更快, 系统可在更短时间内趋于坐标原点, 与传统的自适应滑模方法相比, 本文采用的滑模函数及控制器对整数阶系统均适用, 且形式简便易于操作. 图3 定理2中的系统误差曲线 图4 定理1中滑模函数的变化曲线 图5 定理2中滑模函数的变化曲线 综上, 本文研究了不确定分数阶Rucklidge混沌系统适应滑模同步, 通过设计对数型滑模面和控制律与适应控制律得到了不确定分数阶和整数阶Rucklidge混沌系统自适应滑模同步的充分条件.









2 数值仿真





