直线模拟加载系统的研究进展与发展趋势
2021-01-18侯文国卢锦康徐照平
朱 乐,刘 梁,牛 禄,侯文国,卢锦康,徐照平
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.上海航天动力技术研究所,上海 201109)
0 引言
在航空航天、国防、武器装备等工业领域中,都需要对产品所受阻力载荷进行测试,以保证设计的产品能满足使用要求。在早期的测试环节,都需进行破坏性很强的全实物现场实验,不仅造成研究成本的提高及人力、物力的浪费,而且在实际环境中进行研究,难以在线实时测试阻力载荷,因此,迫切需要在实验室环境中进行测试来降低研究成本和缩短研发周期。模拟加载技术就是能够在实验室环境下,模拟外界各种载荷,将破坏性高的全实物现场实验转变为可控性强、无破坏性、全天候及操作简单的半实物仿真实验,可大大减少产品研发的成本和周期。
模拟加载系统就是用负载模拟器模拟承载对象工作过程中所受的各种力载荷谱,完成承载对象的带载试验。该系统按照加载执行元件不同,可分为机械式、电液式和电动式模拟加载系统。机械式模拟加载系统是最先出现的负载模拟器。20 世纪70 年代初,日本长岗科技大学的池谷光荣最早建立了电液式模拟加载系统。近年来,电动模拟加载系统的研究也得到了国内外学者的广泛关注。在模拟加载系统中,按照加载电机的运动状态可以分为旋转式和直线式,当承载对象做直线运动时,旋转式负载模拟器将电机输出的力矩通过减震弹簧杆作用到摆杆上转化为力,经摆杆将圆周运动转换为直线运动,将力作用到承载对象上。直线式负载模拟器直接将电信号转化为直线运动,不需要任何的中间转化装置便可以提供直线运动,因此,系统结构简单、运行可靠、效率高,在驱动装置中无机械磨损。另一方面,与旋转式负载模拟器相比,直线负载模拟器在运动过程中,各部分结构不会受到离心力的作用,直线运动的速度不会受到限制。由于直线模拟加载系统存在上述优势,因此,本文主要对直线模拟加载技术出现以来国内外的研究进展与发展趋势进行总结。
本文归纳分析了不同加载执行元件的直线模拟加载系统,分别介绍了机械式、电液式和电动式直线模拟加载系统研究现状,并分析了多余力产生机理及多余力抑制研究的关键技术和发展趋势。最后,结合直线模拟加载系统的研究进展和发展趋势进行展望并给出结论。
1 机械式直线模拟加载系统研究现状
机械式直线模拟加载系统早在20 世纪50 年代就已出现,其加载原理是利用弹性元件变形所产生的回弹力模拟承载对象工作时所受的负载力,弹性元件通常为疲劳特性高的板式弹簧、弹簧杆等构件。某研究所基于某型号导弹舵机测试设计的一种弹簧杆式直线负载模拟器(如图1 所示),主要包括进给机构、弹簧杆、力传感器、支架及直线舵机组成。加载原理为将弹簧杆与直线舵机连接,舵机直接带动弹簧杆产生对应的挤压变形,弹簧杆产生一个成比例的弹性变形力,实现对舵机加载[1]。
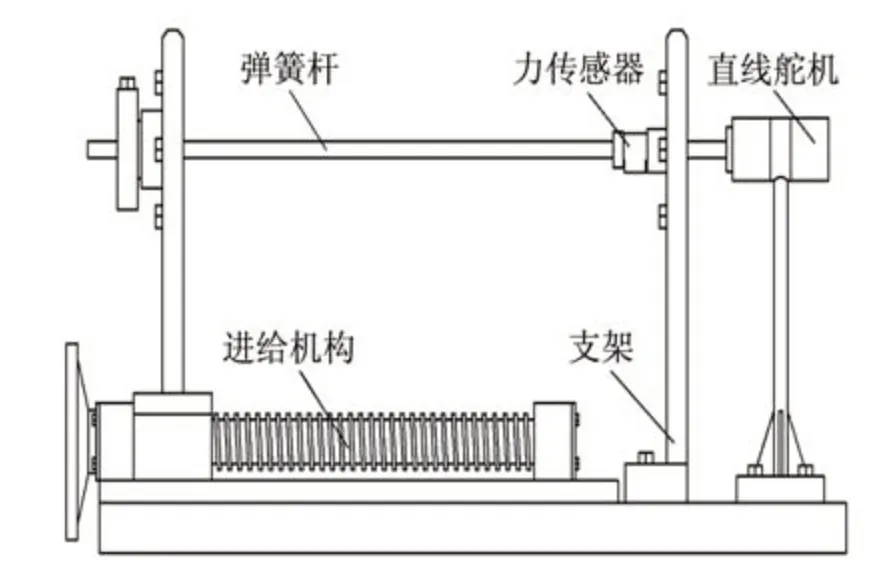
图1 机械式直线负载模拟器结构图Fig.1 Structure diagram of mechanical linear load simulator
机械加载方式简单易行,不会产生多余力,但只能模拟变化规律较简单的负载,无法实现任意力及变力函数加载。机械式直线负载模拟器成本低、结构简单、操作方便,可以模拟恒定的负载力,在早期的小回路仿真中应用较广泛。目前国内研发的机械式直线负载模拟器在开展飞行器的环境试验中,存在可靠性较低、测试时间常数较大、不能够很好跟踪气动载荷等问题,在航空航天领域应用较少。由于电液式、电动式直线模拟加载技术兴起,可以对任意力及变力函数进行加载,机械式直线模拟加载技术正逐步被前两类加载方式替代。
2 电液式直线模拟加载系统研究现状
电液式直线模拟加载系统是以液压马达或者液压泵为系统动力执行元件,从而输出加载力。20世纪70 年代初,日本学者池谷光荣最早搭建了电液式直线模拟加载系统[2]。该系统的结构原理如图2所示,模拟加载系统主要由承载系统与加载系统两部分组成。
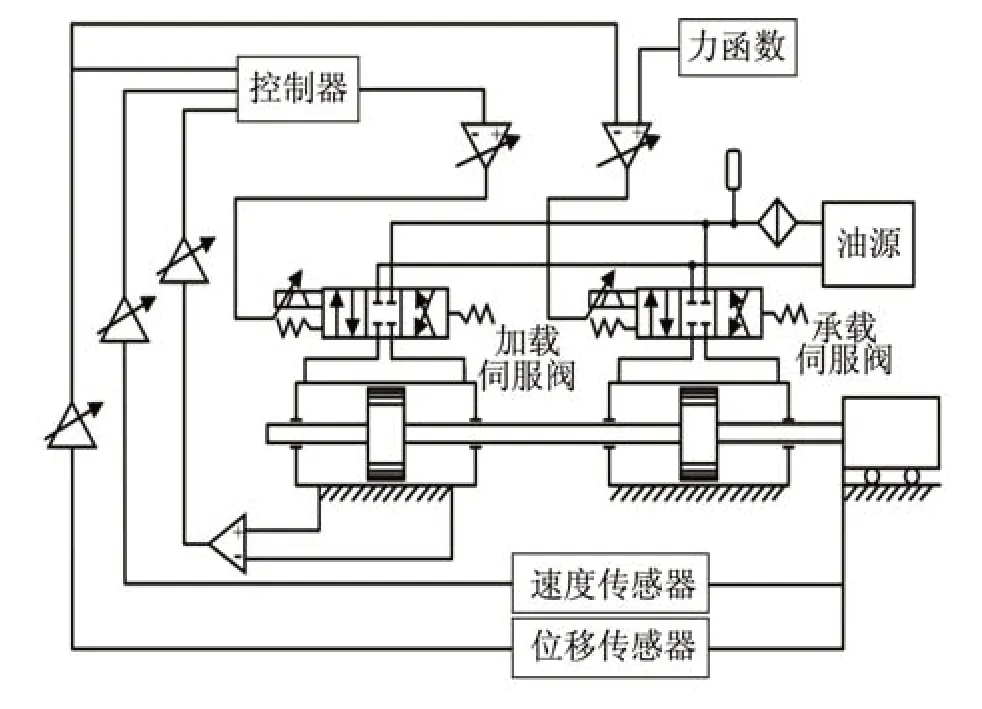
图2 电液伺服加载系统控制原理框图Fig.2 Control principle block diagram of electrohydraulic servo loading system
工作原理为承载系统通过位移传感器来检测位移信号,将位移信号发送给系统控制器,实现位移的闭环控制。加载系统可以实现位置、速度及压差反馈,压差反馈主要通过两个压力传感器分别采集加载液压缸的两工作腔的油压,并通过运算器计算两工作腔的压差,将压差作为反馈信号经模数转换发送给控制器,控制器信号处理后由数模转换器输出给加载伺服阀,以此代替力传感器形成力闭环控制。此类模拟加载系统的发明开启了被动加载方式的新纪元,随后各国相继研制了电液式直线模拟加载技术。
20 世纪八九十年代,美国CARCO 公司研制了S105 系列四轴空气动力电液式直线负载模拟器[3],首次应用到导弹舵机测试中,保证了美国航空航天技术持续发展。瑞士CONTRAVES 公司研发的ADFL-2 型导弹舵面电液式直线模拟加载试验台,在实验室环境中模拟该型导弹所受的空气动力。2004 年,韩国釜山大学研制的一套无阀控电液式直线负载模拟器(如图3 所示),由伺服电机带动液压泵直驱液压缸,输出力的范围可达±5 000 N,该系统主要对低频率、大载荷的对象提供模拟加载[4]。此外,意大利、德国、澳大利亚等国家也在电液式直线模拟加载技术方面取得一定研究成果。

图3 电液式直线负载模拟器原理图Fig.3 Schematic diagram of electro hydraulic linear load simulator
我国电液式直线模拟加载技术发展起步较晚,20 世纪80 年代末才开始有对直线模拟加载技术的相关研究。1989 年,洛阳014 中心自主研发了一台应用于导弹空气动力舵机的电液式直线负载模拟器[5],该负载模拟器的加载系统由一对液压缸对舵机进行加载,系统通过压力流量伺服阀控制两个加载液压缸,使得两个液压缸运动方向始终相反,可有效抑制多余力。2000 年,哈尔滨工业大学研制出一套舵机电液式直线模拟加载系统,该系统包括力加载系统、惯性加载系统及舵机系统[6]。2012 年,西北工业大学设计了电液式直线负载模拟器,并对其进行控制系统设计研究。2014 年,辽宁工业大学研制了直线舵机电液伺服加载系统[7],模拟飞机舵机工作中的空气阻力载荷谱。随着我国经济的发展,电液式直线负载模拟器也得到快速发展,北京航空航天大学、北京理工大学、中国航天二院17 所等都对电液式直线负载模拟器发展作出很大贡献。
由于电液式直线模拟加载技术具有工作频带高、输出能力强、功率质量比大及易于与电气控制相结合等特点,常应用于大回路仿真,所以成为直线模拟加载技术的首选方案。目前,国内外广泛将电液式直线模拟加载技术应用于模拟各类飞行器运动时舵机及起落架表面所受的空气负载力,以考核产品各项性能指标能否达到使用要求。
电液式直线模拟加载技术应用于模拟各类飞行器舵机的空气负载力。中国民航大学采用双液压缸同步加载技术,研究了飞机舵机电液式直线负载模拟器[8],如图4 所示。双液压缸同步加载原理是将两个伺服阀控液压缸并联,同时对一个舵机进行加载。加载系统采用完全相同的两套阀控液压缸,因此,输出加载力比单套液压缸加载系统增大约1 倍,技术难点在于随着负载增大,易出现液压缸不同步问题。

图4 双液压缸同步控制液压系统Fig.4 Dual hydraulic cylinders synchronous control hydraulic system
电液式直线模拟加载技术用于模拟飞机起落架表面所受的空气负载力。2004 年,西北工业大学采用电液式直线负载模拟器模拟起落架气动负载力[9]。飞机起落架在收起前将受到气动负载力影响,针对负载力非线性特点采用反馈线性化将其变为可控线性系统。模拟加载系统采用电液伺服系统模拟起落架的气动负载力,控制原理如图5所示。
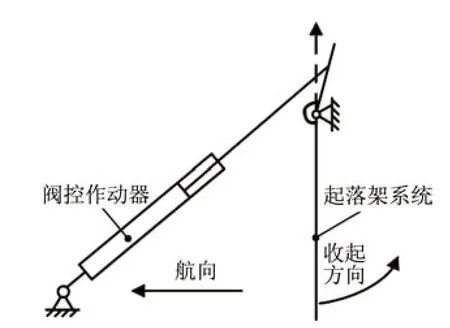
图5 起落架系统控制原理框图Fig.5 Control principle block diagram of landing gear system
电液伺服系统主要通过反馈线性化得到目标气动负载力,并与反馈的实际负载力比较,得出误差信号,转换成液压信号,通过阀控作动器将液压能转变为机械能,实现电液式直线负载模拟。
电液式直线模拟加载技术虽然具有工作频带高、输出能力强、功率质量比大及易于与电气控制相结合等特点,目前在直线负载模拟器中占主导地位,常应用于加载力大且精度要求不高的场合。但其机械结构复杂、易漏油、维护成本较高,且需要油泵或液压站等辅助设施。当加载力较小时,系统加载精度较低,因此,不适合在中小载荷系统中应用。
3 电动式直线模拟加载系统研究现状
随着电子技术、传感器技术、控制策略的发展,以及机械式与电液式直线负载模拟器存在加载精度低等问题,20 世纪70 年代末进入电动伺服控制技术时期,电动式直线负载模拟器应运而生。该类型负载模拟器采用直驱电机取代液压缸来实现对被测对象的加载,系统主要包括直线加载电机、直线承载电机、力传感器、位移传感器、控制器及驱动器组成,该系统是典型的被动式力控制系统。力加载系统工作原理如图6 所示,加载电机动子、力传感器通过连接轴与承载电机刚性连接,试验时,加载电机被动地跟随承载电机共同运动,并对后者产生模拟加载力。加载系统通过控制器控制加载电机的输出力,承载系统所受的模拟力通过力传感器再反馈给控制器,形成力闭环控制。承载电机的位移信号也反馈给控制器,形成位移闭环控制。

图6 电动伺服加载系统控制原理框图Fig.6 Control principle block diagram of electric servo loading system
2001 年,TEMLTAS 研究了某型机器人手臂的非线性电动式直线模拟加载技术的半实物仿真系统,利用两台直驱电机模拟关节受力情况[10]。2004年,荷兰FCS 公司研制了E-Cue660 型电动式直线负载模拟器,最大加载力可达140 kN[11-12]。国内电动式直线模拟加载技术发展起步较晚,但发展迅速。2003 年,哈尔滨工业大学控制与仿真中心为北京航天三院制造出ET04B 电动式直线负载模拟器[13]。2008 年,西北工业大学提出一种某型电动直线舵机加载系统[14],舵机可完成12~18 mm 直线运动,最大加载力可达100 N。2009 年,哈尔滨工业大学崔铁铮等[15]研制了一套双通道直线舵机加载系统,可同时对两台不同型号的舵机进行电动式直线加载。2016 年,南京理工大学研制出一种电动式直线负载模拟器[16],成功应用于模拟汽车发动机的气门的负载力。
由于电动式直线负载模拟器比机械式或电液式直线负载模拟器加载精度高、跟踪能力强、加载分辨率高,因此,常用于航空航天领域,用于模拟工作中小型飞行器的舵机、姿轨控发动机燃气调节阀所受的气动负载力。
电动式直线负载模拟器广泛应用于模拟小型飞行器的舵机在工作状态下所受的气动负载阻力。2017 年,湖北工业大学研究了电动直线负载模拟器模拟直线舵机所受的气动负载阻力[17]。该系统是典型的被动式力控制系统,力加载系统原理如图7所示,直线电机通过力传感器对舵机输出直线加载力。系统对直线电机部分进行力闭环控制,可以较精确地模拟舵机工作过程中的气动负载阻力,对舵机部分进行位移闭环控制,模拟舵机正常工作时的运动状态。
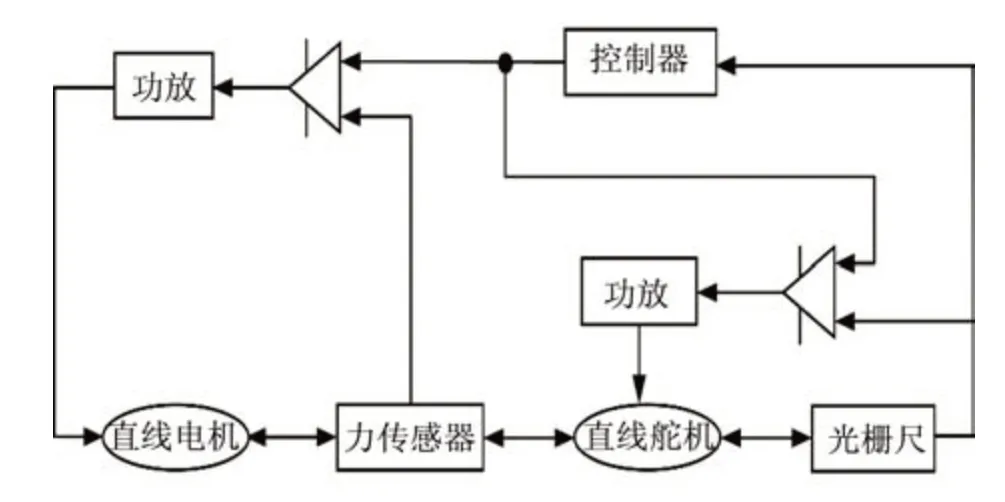
图7 力加载系统原理图Fig.7 Schematic diagram of force loading system
当舵机加载频率达到10 Hz 时,直线伺服液压缸难以实现加载,而摆杆和凸轮机构可在高频率下实现力加载。2010 年,西北工业大学研发了一种某型气动舵机的电动式直线负载模拟器[18],采用摆杆机构将电机的扭转转换成直线运动。舵机加载测试系统是由力矩电机、弹簧杆、力矩传感器、旋转编码器和摆杆5部分组成,其安装示意图如图8所示。

图8 舵机加载测试系统结构图Fig.8 Structural diagram of servo loading test system
为了克服惯性摩擦转矩与加速转矩,达到对输出转矩的精确控制,常采用双闭环控制方案,即外环为力环,内环为电流环。双闭环控制实现对转矩的实时控制,有利于减小电机的波动力。RADHAKRISHNAN 等[19]研究的冲击疲劳试验机主要由永磁同步电机、凸轮、滚子、顶杆及脉冲发生器组成,其结构如图9 所示,冲击疲劳试验机采用顶杆机构将凸轮的旋转运动变为直线运动,进而对工作台上的对象输出冲击加载力,广泛用于国内外枪炮及航天飞行器关键部件的寿命试验。
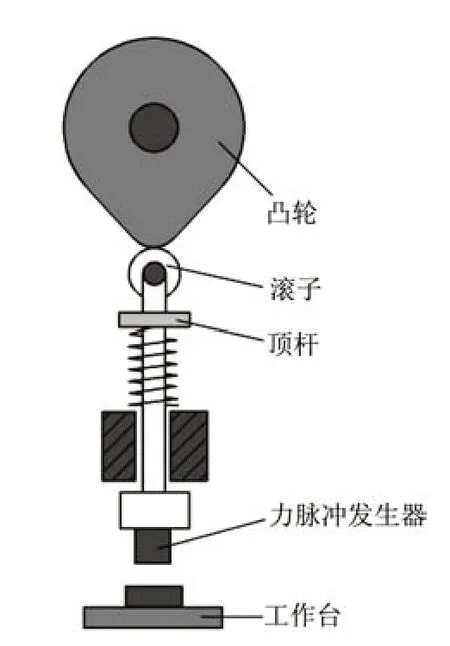
图9 冲击疲劳试验机结构简图Fig.9 Structural diagram of impact fatigue testing machine
电动缸相较于液压缸、气缸,具有控制精度高、维护工作量小及环节污染小等优点,在越来越多的场合中得到应用。目前,国际上生产电动缸比较知名的公司有美国的Exlar、Danaher Motion,丹麦的Linak,日本的Cosmic 以及德国的Bosch,其中Exlar公司在采用滚珠丝杠驱动电动缸方面做得十分出色[20]。由于电动缸的良好控制优势,2018 年燕山大学研究了一套电动缸载荷系统(如图10 所示),该系统通过自抗扰控制器可准确模拟极端条件下载荷谱要求,实现在极端条件下载荷谱精确控制,可对航空飞行器中关键部件的性能和寿命进行试验与评价[21]。
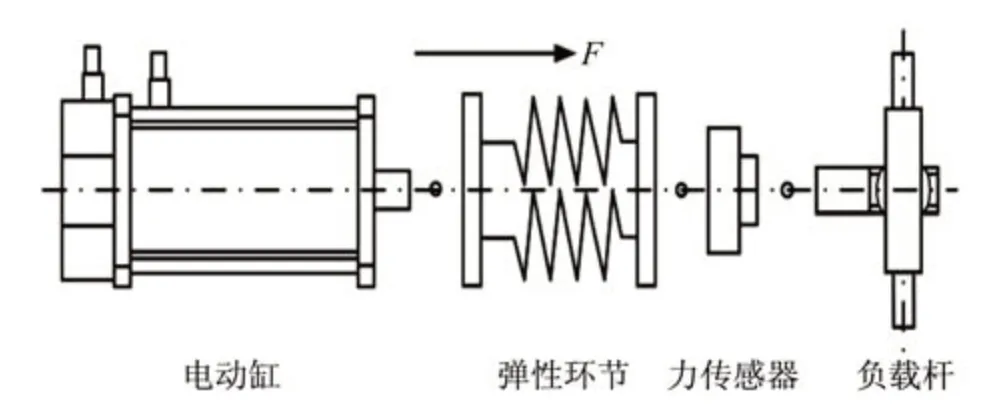
图10 电动缸载荷系统结构简图Fig.10 Structural diagram of load system of electric cylinder
电动式直线模拟加载技术常应用于姿轨控发动机的燃气调节阀方面。姿轨控发动机主要是给火箭、导弹弹头及各类航天器的调姿、变轨、对接提供动力。燃气调节阀作为姿轨控发动机的重要组成部分,工作环境中存在气动负载阻力的影响,本课题组自行研制出一套四通道电动式直线负载模拟器,能够同时对四路燃气调节阀进行模拟加载,其单路模拟加载系统控制原理如图11 所示。

图11 电动式直线模拟加载系统控制原理框图Fig.11 Control block diagram of electric linear analog loading system
燃气调节阀模拟加载系统主要由燃气调节阀、DSP 控制器、信号调理单元、电磁直线负载模拟器、力传感器及上位机组成。燃气调节阀作为承载对象,通过连接轴力传感器及电磁直线执行器刚性连接在一起。当燃气调节阀按照预定曲线运动时,电磁直线负载模拟器通过轴被动跟随燃气调节阀共同运动,对位移进行了被动跟随。控制器根据采集到的燃烧室压强信号及燃气调节阀的位移信号确定目标加载力,采集实际输出力与目标加载力进行比较,通过智能算法进行计算。功率驱动模块将接收的脉冲宽度调制(PWM)信号转为大的电流信号输出给电磁直线负载模拟器,从而将输出的电磁力主动加载到燃气调节阀上,进而模拟输出气动负载力特性。
电动式直线模拟加载技术适用于工作在载荷不大场合,并且具有加载精度高、系统响应速度快、便于维护、体积小及无污染等优势,适合在实验室环境中进行半实物仿真。但在高速度和大力载荷场合,设备可能因设计指标要求需较大的转动惯量,导致直线负载模拟器的加载精度降低。因此,电动式直线负载模拟器常应用在加载载荷不大、精度高及响应快的场合。
4 关键技术与发展趋势分析
4.1 直线模拟加载系统的关键技术
直线模拟加载技术主要分为机械式、电液式和电动式3 类。机械式直线模拟加载技术只能进行恒定力加载,无法进行任意力及变力加载,在航空航天领域逐步被电液式、电动式直线模拟加载技术取代。因此,本文主要讨论电液式、电动式直线负载模拟器关键技术,这两类负载模拟器的关键技术主要包括4 个方面[22]:
1)无扰加载时要能满足性能指标。根据实际工作要求,电液式、电动式直线负载模拟器在无扰跟踪情况下需满足双十指标,即在系统最高工作频率下输出力相角误差不大于10°,幅值误差不超过10%。使得系统频域特性在低频段中平坦,从而保证系统能够精确跟踪载荷谱。
2)动态加载时能有效抑制多余力。电液式、电动式直线负载模拟器是一种被动式力伺服控制系统,因此,存在难以消除多余力的问题。原因是承载对象会按照位置指令进行运动,负载模拟器与承载对象一般通过轴刚性连接,负载模拟器处于被动加载方式下,承载对象必然对负载模拟器产生强位置干扰,进而产生多余力。相关试验表明,多余力会降低系统加载精度,降低系统加载稳定性,严重影响其正常工作,因此,必须进行有效抑制。
3)动态加载时具有高精确性。直线负载模拟器的加载力函数是任意的函数,能精确地复现加载力函数,则加载系统应为高阶无静差系统。但负载模拟器工作时存在多余力,以及多余力的微分特性使得加载系统在承载对象高频运动时,难以实现高阶无静差加载。因此,要精确地实现动态加载,需要有效抑制多余力。
4)控制系统具有较强鲁棒性。直线负载模拟器的承载对象可能是飞行器的舵机、燃气调节阀阀芯及飞机起落架等,不同的承载对象可能导致加载系统的结构参数、系统控制性能发生变化,特别是导致多余力补偿控制环节的参数变化,因此,必须使控制系统具有较强的鲁棒性。
在承载对象有运动扰动情况下,电液式、电动式直线负载模拟器受到多余力的严重影响,使控制变得困难。因此,需要最大限度地抑制多余力,提高精确加载的控制性能。目前,国内外学者在研究直线负载模拟器时,都从抑制多余力入手,提出许多行之有效的方法,主要分为两大类:第一类是对硬件结构进行改进,即结构补偿法,通过改变系统机械结构或改变局部连接方式抑制多余力,从机械结构上削弱多余力;第二类是对软件控制策略进行改进,即控制补偿法,该方法是从控制策略上出发,在软件控制程序中采用高级或混合的智能补偿算法对多余力进行抑制[23]。
结构补偿法一般适用于电液式直线负载模拟器,常用的结构补偿法有:1)安装连通孔[24],如图12(a)所示。在伺服阀两个油腔间通过连通孔,减弱因流量变化导致的系统压力变化,使得多余力减小。2)蓄压器校正[25],如图12(b)所示。加载液压缸的两工作腔各连接一个蓄压器,当工作腔内压力升高时,蓄压器可以吸收部分压力,当工作腔内压力下降时,蓄压器可以释放存储的压力,吸收承载系统对加载系统的强迫流量,抑制多余力。3)反向同步补偿[26],如图12(c)所示。在加载与补偿液压缸之间加入一套动力装置,使得两个液压缸的位移X1和X2大小相等,方向相反,进而加载液压缸引起的强迫流量被补偿液压缸吸收,抑制了多余力。4)缓冲弹簧校正[27],如图12(d)所示。在加载液压马达和承载系统间加一个缓冲弹簧,通过弹簧吸收掉一部分冲击,强迫流量在低频段出现衰减,从而抑制多余力。5)位置同步补偿[28],如图12(e)所示。在加载液压马达后加一个同步液压马达,前者负责输出加载力,后者补偿位置变化,抑制多余力。6)双阀流量补偿,在执行机构前增加一个流量阀,其与液压缸伺服阀并联,在加载伺服阀引起强迫流量时,流量阀可将强迫流量转移至另一工作腔,从而抑制多余力。
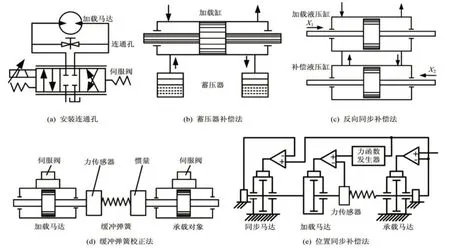
图12 结构补偿法原理图Fig.12 Schematic diagram of structural compensation method
从软件控制策略抑制多余力,也称控制补偿法。对于电液式、电动式直线负载模拟器,一般选择控制补偿法抑制多余力,常用的抑制方法主要有:1)结构不变性原理[29-30],又称为速度同步补偿法,如图13(a)所示。通过对位移干扰量进行观测,根据观测到的干扰规律设置合理的前馈补偿器,使用控制器消除干扰,从而抑制多余力。2)神经网络控制[31],如图13(b)所示。神经网络算法具有学习与自适应功能,在解决非线性问题方面具有很大优势,它将位置干扰作为输入,以目标力与输出力误差最小为目标,达到消除多余力作用。3)位置辅助同步补偿[32],将承载系统位置引入到加载系统,使两系统一同运动,消除位置干扰,使加载系统近似于处于静态加载状态,进而消除多余力。4)开‑闭环统一性理论[33],利用先开环后闭环控制,误差较大时利用开环控制快速缩小误差,误差较小时自动进入闭环状态。5)多变量解耦控制[34],将加载系统和承载系统看成多变量系统,分别取承载系统和加载系统的输入信号为两个输入量,输出作为系统的两个输出量。通过选择适当的解耦控制器,达到抑制多余力,但解耦控制器较复杂,完全实现解耦困难。6)混合控制方法[35],包括滑模变结构控制器部分、定常补偿部分和前向校正部分,其中,滑模变结构控制器作用是保证加载的快速性和鲁棒性,定常补偿部分主要用来抑制多余力产生。所有抑制多余力控制策略中应用最普遍的是结构不变性原理,又称为速度同步补偿法,由北京航空航天大学自动控制系提出,该方法某公司将该方法应用于3-4FM 型导弹气动负载仿真台上[36]。
结构补偿法的稳定性高,但会增加系统复杂性及成本,通用性差,且会牺牲系统控制性能,使响应变差,所以应用上受到很大限制。而控制补偿法采用智能补偿算法对多余力进行抑制,具有成本低、便于调试、灵活性高等优势,但需建立复杂准确的系统数学模型。综合两类方法优缺点,控制补偿法已成为直线负载模拟仿真台系统抑制多余力的主要方法。控制补偿方法多种多样,各有优缺点,现在国内外把焦点集中在复合控制方面,即经典PID控制与现代控制理论结合,PID 控制具有使用简单、鲁棒性强、适应性强等优点,现代控制理论适用于非线性、时变系统,还具有自学习、参数自调整及自适应等优点。两者相结合,可取长补短,在航空航天领域,加载系统实时性要求高,复合控制可显著提升负载模拟精度[37]。
4.2 直线模拟加载系统的发展趋势
三类直线负载模拟器各有优弊,且应用场合不同,见表1。早在20 世纪50 年代,机械式直线负载模拟器就已出现,具有成本低、结构简单且不会产生多余力等优点,但存在无法进行任意力及变力加载的问题,应用场合不多。在70 年代初,池谷光荣研制了电液式直线负载模拟器,具有工作频带高、输出能力强等特点,常应用于加载力大且精度要求不高的场合。但其机械结构复杂、易漏油、维护成本较高,并且需辅助设施油泵或液压泵,加载系统复杂。在70 年代末,由于电动伺服控制技术发展,电动式直线负载模拟器应运而生,其具有加载精度高、系统响应速度快、便于维护等优势,目前应用越来越广泛。但其输出的加载力有限,适合应用在加载精度高、中小载荷及响应快的场合。

表1 各类直线负载模拟器的比较Tab.1 Comparisons of different load simulators
如今,电液式与电动式直线负载模拟器依据各自加载特点在市场上占据主导地位。从满足加载指标要求出发,直线负载模拟器的发展趋势主要有以下3 个方面。
1)提高直线负载模拟器的加载精度。随着航空航天、国防、武器装备等领域的发展,对飞行器的稳定性、快速性及可靠性要求越来越高,因此,对飞行器系统重要组成部件舵机性能要求也变高。直线负载模拟器作为对舵机进行模拟加载的重要设备,需要提高其加载精度,以满足高性能飞行器的要求。
2)增大直线负载模拟器的加载梯度。随着飞行器的不断发展,其外形尺寸越来越大,行驶速度越来越快,因此,舵机、起落架等设备所受的空气阻力也呈现增大趋势。这就迫使直线负载模拟器要有更高的加载能力,增大加载梯度是直线负载模拟器的一种发展趋势。
3)发展电动式直线负载模拟器。近年来,随着直线电机行业的快速发展,电子技术、传感器技术、控制策略逐渐成熟,以及各领域对加载精度要求的不断提高,电动式直线负载模拟器应运而生。电动式直线负载模拟器还具有系统响应速度快、维护方便、体积小、无污染和泄漏问题等优势,因此,能获得更好的经济效益。在加载精度高、载荷不大及系统响应快的场合中,电动式直线负载模拟器将成为一种发展趋势。
5 结束语
本文对国内外直线模拟加载技术进行了综述。随着航空航天事业的发展,直线模拟加载技术广泛应用于导弹、卫星、火箭及飞机等航空航天器件的研发过程中,可大幅降低测试成本,缩短研制周期,保证所设计产品的性能,成为地面半实物仿真必不可少的重要试验系统。电动式直线模拟加载系统以高精度、快响应、低成本的优点,成为国内外模拟加载系统研究新的发展方向,对各类飞行器的研究与发展具有重要的应用价值与现实意义。