半挂车机械爬梯装置的设计与研究
2020-12-24林成欢周新红冯海青
林成欢 周新红 冯海青
湖北三江航天万山特种车辆有限公司 湖北孝感 432000
1 前言
爬梯装置是在半挂车尾部与地面之间形成斜坡过渡的过渡装置。借助爬梯装置,轮式和履带式车辆可以顺利上下半挂车货台。爬梯装置在运输重型工程装备的低平板半挂车上有广泛运用,目前市面上的机械爬梯装置或多或少都存在一些问题,主要有以下几个方面;一是外形不美观,细节粗糙;二是强度不足,市面上的机械爬梯装置,经过一段时间的使用,普遍会出现较大的变形,变形位置主要集中于承载本体纵梁、面板和爬梯与车架连接结构处;三是操作费力,爬梯装置的收回和放下都需操作人员手动操作,十分费力。因此,笔者通过对半挂车机械爬梯装置的分析研究,总结研发了一套设计方法,并对机械爬梯装置的复位弹簧机构进行了优化改进。
2 爬梯装置总体布置设计
爬梯装置由左右爬梯本体、复位弹簧机构和系留装置等组成。
爬梯本体是爬梯装置的承载结构,主要由纵梁、横梁、支耳等结构组成。当爬梯本体放下时,可在半挂车尾部与地面之间形成斜坡过渡。根据爬梯本体分段数的不同,爬梯本体可分为单级爬梯和二级爬梯。
复位弹簧机构由压缩弹簧、导向杆和支撑结构组成,弹簧两端分别支撑在爬梯本体与车架尾部支耳上,在爬梯本体放下时弹簧受压将爬梯势能转化成弹簧压缩能而起到缓冲作用,在爬梯本体收起时弹簧则将压缩能转化为爬梯势能而起助力作用,使爬梯本体收放平顺、省力,改善爬梯装置的操作性能。
机械爬梯装置布置图如图1所示。
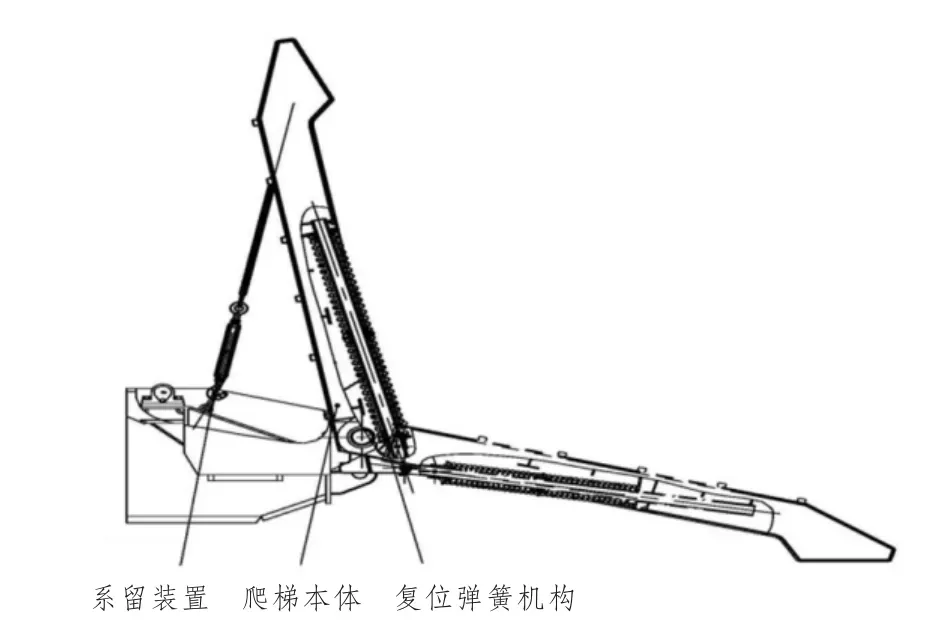
图1 机械爬梯装置布置图
3 爬梯本体设计
3.1 纵向外形轮廓设计
爬梯本体设计时,首先需要根据爬梯安装位置与斜坡角度要求,规划其纵向外形轮廓,并兼顾复位弹簧机构的空间需求,为后续设计提供依据。根据爬梯本体斜坡面前端是否设置过渡斜坡,可将纵向外形轮廓分为3种,如图2所示。

图2 爬梯本体的纵向外形轮廓
a.单一斜坡本体外形。此种外形爬梯斜坡角度较小,长度较长,主要用于待装载的车辆接近角较小或其车体长度很长的场合。因爬梯本体较长,此种外形结构通常需设计成二级爬梯结构,才能满足挂车总高限制要求;
b.带小过渡斜坡的本体外形。增加过渡斜坡可以截短爬梯本体长度,同时被装载车辆采用牵引方式下车完毕时,不易压住爬梯本体前端。此种外形结构主要用于挂车货台高度可调(货台低位装载)或采用二级爬梯结构场合;
c.带较大过渡斜坡的本体外形。此种外形特点与带小过渡斜坡的本体外形相近,差别在于过渡斜坡更大,本体长度可以更短。此种外形结构主要用于挂车货台高度较高且要求必须采用单级爬梯结构场合。
对于爬梯本体长度较长,爬梯装置收回后整车高度不满足挂车总高限制要求的情况,爬梯本体需采用二级爬梯结构,二级爬梯的折叠方式有向前折叠和向后折叠二种。
a.向前折叠,如图3所示。此种方式便于手动折叠,爬梯收起前,第二级爬梯已折叠,操作安全,收起过程中质心平稳,适用于机械爬梯;
b.向后折叠,如图4所示。此种方式爬梯收起前二级爬梯无法提前折叠,只能在收起过程中折叠第二级爬梯,此方式适用于液压爬梯。

图3 向前折叠的二级机械爬梯示例

图4 向后折叠的二级机械爬梯示
3.2 承载结构设计
爬梯本体承载结构主要采用箱形结构和框架式结构两种结构形式。
a.箱形结构如图5所示。与框架式结构相比,箱形结构外形简洁,占用空间较小,但在相同承载能力条件下,其结构质量较大。为加强爬梯斜坡面承载能力,箱形结构内部需沿纵向设置多条加强筋,因空间有限,其焊接操作性不是很好。箱形结构主要用于对外观要求较高的场合。
b.框架式结构如图6所示。框架式结构爬梯本体一般由纵梁、横梁和面板组成,当外观要求不高且主要装载履带式车辆时也可以不设面板。框架式结构是爬梯本体通常采用的结构型式,一般有双纵梁和三纵梁两种布局形式。

图5 采用箱形结构的爬梯示例

图6 采用框架式结构的爬梯示例

图7 采用三纵梁结构的爬梯本体示例
3.3 与车架连接结构设计
3.3.1 连接结构形式
爬梯本体与挂车尾端通过耳板-销轴结构连接,根据销轴数量不同,有单轴连接和多轴连接两种型式。
a.单轴连接如图8所示。此种结构采用一根通轴,将爬梯本体所有耳板与挂车尾端所有耳座连接在一起;
b.多轴连接如图9所示。对于此种结构,本体上每一根纵梁均有一根销轴与车架连接。 两种结构中,单轴结构相对简单,零件数量少,但结构质量较大,加工成本较高,装配较困难。通常情况下爬梯本体应采用多轴结构,对于需要左右调节的爬梯装置来说,则只能采用单轴结构。
由于爬梯装置长期露天工作,粉尘较多,为确保爬梯收放顺畅,其耳板与销轴应采用大间距配合。当耳板与销轴无相对转动时,配合间距取0.5~

图8 单轴连接结构示例
3.3.2 支耳结构设计
支耳设计时,其结构有整体耳板、耳板+单(双)侧环板和耳板+套管3种结构形式,如图10所示。

图9 双轴连接结构示例
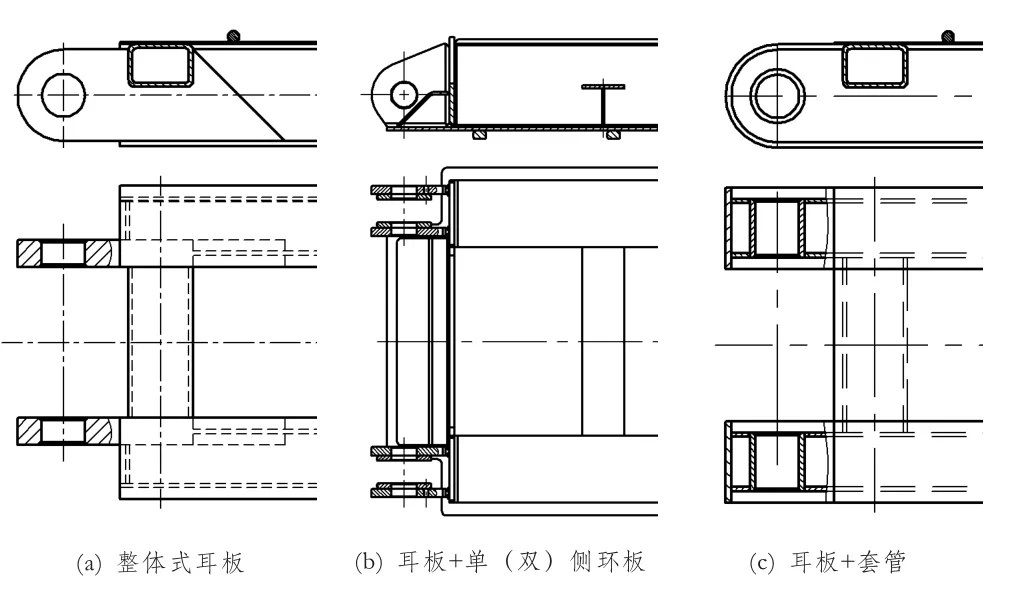
图10 爬梯本体支耳结构类型示例
a.整体耳板结构。其结构简单,但结构质量较大,主要用于采用单轴连接结构的爬梯本体;
b.耳板+单(双)侧环板结构。设计时,其耳板按强度需求选择板厚,并设置单(双)侧环板满足接触应力需求,其结构质量小于整体式耳板,是爬梯支耳通常采用的结构形式;
c.耳板+套管。此种支耳实际上是纵梁的一部分,通过增加套管来满足接触应力需求,其结构质量最小,但因纵梁腹板厚度较小,其与套管连接处易出现应力集中,主要用于载荷较小的爬梯本体。
当支耳采用整体耳板和耳板+单(双)侧环板结构型式时,需考虑耳板与纵梁的连接结构。
a.当一根纵梁仅设置一块支耳时,可将耳板与纵梁腹板沿斜向对拼焊接,确保耳板有足够焊缝长度,如图10 (a)所示;
b.当一根纵梁设置两块支耳时,因支耳间距需按车架尾部尺寸确定,耳板与纵梁腹板对正有困难,此时可在纵梁端部设置挡板,再在挡板上布置支耳,如图10(b)所示,此种结构必须校核耳板焊缝强度。
4 复位弹簧机构设计
4.1 爬梯装置收放力矩特性
压缩弹簧的作用就是让弹簧力矩匹配重力矩,使爬梯装置能平稳落下和轻松收回,爬梯装置的工作过程就是弹簧力矩和爬梯重力矩相互作用的过程。图11为爬梯装置弹簧力矩和爬梯重力矩的力矩特性图,图中纵坐标为爬梯重力矩和弹簧力矩,横坐标为爬梯角度α,以爬梯本体与铅垂方向的夹角表示。

图11 爬梯力矩特性图
由图11可知,爬梯装置整个工作过程中弹簧力矩和爬梯本体重力矩有A、B、C3个平衡点,这3个平衡点将整个工作过程分为4个区域,现以爬梯装置放下过程为例说明。A点之前,弹簧力矩大于重力矩,爬梯斜靠在车架尾部,需要操作力将爬梯推倒;AB之间,重力矩大于弹簧力矩,爬梯加速落下;BC之间,弹簧力矩大于重力矩,爬梯减速落下,会在BC段某处静止,需操作力将爬梯放下;C点之后,重力矩大于弹簧力矩,爬梯落地静止。
爬梯装置收回和放下两种工作过程在4个区域都需要操作力。操作力的大小等于弹簧力矩和爬梯重力矩的差值/操作力力臂,弹簧力矩和重力矩差值越小,操作力越小,爬梯装置放下和收回越省力。
AB段的操作力力臂小于BC段操作力力臂,在操作力一定的情况下,BC段弹簧力矩和重力矩差值应大于AB段弹簧力矩和重力矩差值。
爬梯装置收回后斜靠在车架尾部,没有系留的情况下要保证爬梯不会在车辆启动时落下,爬梯要以一定角度斜靠在车架上。半挂车启动加速度较低,一般为0.15g左右,爬梯倾斜10°左右时即可保证爬梯不会在车辆启动时落下,增加了爬梯装置系留的可靠性。同时此倾斜角度推动爬梯所需的操作力也较为适中。
综上所述,爬梯装置工作过程的力矩特性应同图11类似。
4.2 压缩弹簧参数选取
图12为爬梯装置处于水平位置的点位示意图,爬梯支点作为坐标原点,(X1,Z1)为弹簧固定支点坐标, (X2,Z2) 为弹簧运动支点参数,G1为爬梯本体质心,G2为弹簧和支撑杆质心。由于爬梯本体质量和质心已知,可得到长度LOG1和角度β。预估弹簧和支撑杆质量可以获得长度LOG2和角度ε。
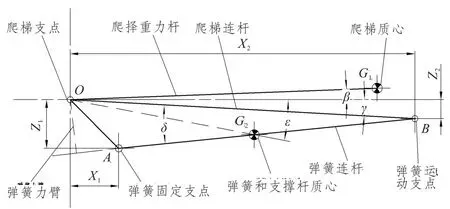
图12 水平位置弹簧示意图

图13 α角度位置弹簧示意图
由图12可计算出以下参数。

由图13可计算出以下参数。
爬梯本体质心横坐标:

弹簧和支撑杆质心横坐标:

弹簧运动支点横坐标:

弹簧运动支点纵坐标:

弹簧连杆长度:

解∆OAB,求得角度δ值。
弹簧力臂:

由4.1可知,弹簧力矩和爬梯重力矩应符合图11中的力矩特性,爬梯本体初步设计完成后,通过预估弹簧和支撑杆质量可以得到爬梯重力矩曲线,弹簧力矩与弹簧力臂、弹簧压缩量和弹簧刚度相关;弹簧力臂和弹簧压缩量由图12(图13)中的∆OAB决定,在图13中,B点往右移,弹簧压缩量变大,反之变小;考虑到复位弹簧安装机构安装空间,X2值不宜过大,依据经验初选X2为爬梯本体长度一半,X2初定为0。A点往右下角移动,弹簧力臂变大,反之变小;在满足车架尾部安装条件和整车离去角的情况下,X1、Z1尽量取大,从而初步确定X1、Z1初始值。
(X1、Z1) 、(X2、Z2) 取值依据计算结果可做相应调整,优先调整(X2、Z2) 值,且X2作为粗调,Z2作为微调。为了计算方便,假设α为0°时压缩弹簧为自然状态。
图11的理想状态即是弹簧力矩曲线和爬梯重力矩曲线完全重合,爬梯装置在收回和放下过程中的任意角度位置弹簧力矩和爬梯重力矩平衡,整个工作过程中人所施加的操作力为0,可以达到完全省力的效果。
工作过程中每隔1°计算一次力矩平衡,可以计算出任意角度位置弹簧所需的刚度,由于选取的压缩弹簧为单一刚度,故可以计算出所有角度位置的弹簧刚度值并取其均值作为压缩弹簧理论刚度值。具体计算公式如下:

α角度位置弹簧力:
弹簧自由高度:

弹簧压缩量:

弹簧刚度:

弹簧理论刚度:

弹簧压缩行程:

弹簧最大工作负荷:

实际工作中,爬梯在0°位置时弹簧仍处于压缩状态,故弹簧实际自由高度应略大于理论计算值。爬梯装置落地后,压缩弹簧处于整个工作过程中的最大压缩量和最大工作负荷状态,为了防止地面不平导致弹簧压缩量不够,实际弹簧压缩行程和最大工作负荷应大于理论计算值。
压缩弹簧参数选取按以下步骤进行:
a. 根据弹簧最大工作负荷,按照标准GB/T 2089-2009选取弹簧线径d、中径D和标准节距t;
b. 根据弹簧理论刚度计算弹簧有效圈数;
c. 计算弹簧自由高度和弹簧压缩行程;
d. 若弹簧自由高度和弹簧压缩行程均符合要求,则选择弹簧基本合格;若不符合要求,则需更改初始参数(X1、Z1) 、 (X2、Z2)值重新计算并选取弹簧参数直至符合要求。
4.3 压缩弹簧参数和安装点位优化
若选取弹簧判定为基本合格,则需将实际弹簧参数带入公式中验算,计算任意爬梯角度位置弹簧力矩和爬梯重力矩,并绘制同图11的力矩特性图。分析爬梯力矩特性图,判断力矩特性是否符合以下2个条件:
1.曲线特征。力矩曲线走势应与图11类似,有3个平衡位置4个工作区域,BC段弹簧力矩和爬梯重力矩差值大于AB段弹簧力矩和爬梯重力矩差值,爬梯角度为0时弹簧还有一定压缩量。
2.操作力。操作力等于弹簧力矩和爬梯重力矩差值/操作力臂,分别计算A点之前、AB之间、BC之间、C点之后共4个区域的最大操作力(一般不大于20 kg)。
依据对比结果,对弹簧参数进行优化:
a.若力矩特性同时满足第1、2条或仅满足第2条,则弹簧参数和安装点位合理,完成弹簧设计。
b.若力矩特性仅满足第1条,首先须微调X2、Z2值使力矩特性满足第2条,若仍不满足,需按照弹簧参数选取步骤重新选择弹簧线径、中径,直至力矩特性同时满足第1、2条或仅满足第2条。
c.若力矩特性同时不满足第1、2条,则需从4.2开始重新设计弹簧安装点位,重新选取压缩弹簧参数,直至同时满足第1、2条或仅满足第2条。
5 结语
本文通过对当前市面上半挂车机械爬梯装置的研究,对爬梯装置本体承载结构设计进行了分析研究,指出了爬梯本体设计过程中应注意的问题,对压缩弹簧的安装点位和主要参数进行了分析和计算,发明了一种弹簧参数选取方法,优化了复位弹簧机构,使爬梯的放下和收回过程更省力。