舰载平台交叉眼干扰设备作战应用分析
2020-11-26顾力伟
顾力伟,刘 咏,王 坚
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
单脉冲雷达是20世纪50年代初期出现的一种精密跟踪雷达。它利用比较水平方向上2个波束的幅度和相位信息的方法确定方位,利用垂直方向上2个波束来确定仰角。理论上,单脉冲雷达可利用单个目标回波定向,其对不具备角度欺骗能力的自卫式干扰具有免疫能力。传统的噪声压制不能有效干扰单脉冲雷达,反而会将实施者暴露在单脉冲雷达信号截获范围内,因此单脉冲测角雷达具有很强的抗干扰性,给飞机和舰船带来极大的威胁。为了有效对抗单脉冲雷达,电子对抗研究人员设计了交叉眼干扰技术,主要用于飞机、舰船等武器平台上对来袭的雷达末制导导弹进行角度诱偏。交叉眼干扰是一种相干干扰,它依据单脉冲雷达测角原理,将单脉冲体制雷达测角引导至干扰源连线之外,对单脉冲雷达有较好的欺骗干扰作用,被认为是当前对单脉冲雷达最有效、最具发展前景的干扰方式之一。交叉眼干扰通常作为作战平台的自我防卫手段,在战斗机、军舰等执行任务时,其造成的欺骗干扰效果能够在敌方导弹制导末段提供有效保护。
1 交叉眼干扰原理
交叉眼干扰采用2个在空间上相隔一定距离的干扰辐射源,发射模拟雷达回波,并使其在功率、相位等参数上满足一定条件,各发射信号合成雷达天线相位中心所在空间点的局部特殊辐射场[1]。交叉眼干扰根据实现不同可以分为2种模型:非反向交叉眼干扰和反向交叉眼干扰。非反向交叉眼是指通过一个接收机接收雷达信号,然后通过功分器将信号分为2路,经过放大、反相调制,通过2个干扰机发射出去。反向交叉眼是指通过2个接收机接收雷达信号,经过放大调相后,通过2个反向路径发射出去[2]。这2种模型的干扰信号传输路径不同,从而导致干扰效果出现差异。
下面先从单脉冲雷达接收信号回波过程的角度出发,对交叉眼干扰信号进行建模与仿真。以单脉冲雷达接收机同时接收目标回波与交叉眼干扰信号作为分析对象,其原理图如图1所示。
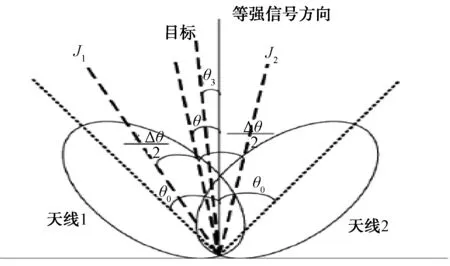
图1 雷达接收机截获的干扰信号与回波示意图

(1)
经过波束形成网络,得到和差信号EΣ,EΔ:
(2)
根据单脉冲雷达测向的原理,其鉴相器输出的误差信号为:
(3)
线性分布近似后有:
F(θ0±θ)=F(θ0)∓|F′(θ0)|θ
(4)
abcos(φ1-φ2))+θ3·(a2+acosφ2+
abcos(φ1-φ2))]
(5)
由于单脉冲雷达测角的工作机理,其雷达指向通过将误差信号不断逼近于0进行调整,当se(t)=0时,设J1、J2干扰波形的角平分线与目标回波信号之间的夹角为α,即α=θ-θ3,目标回波与雷达的实际指向角之间的偏差θ′为[3]:
(6)
由式(6)可知,对于交叉眼干扰条件下的单脉冲测向雷达,其雷达指向角与正确目标位置之间的误差角θ′主要与6个参数有关:(1)J1、J2干扰波形的角平分线与目标回波信号之间的夹角α;(2)2个干扰信号J1、J2的振幅强度比b(分立干扰机的一致性);(3)目标回波与其中一个干扰信号(比如J1)的振幅强度比(干信比的倒数)a;(4)2个干扰信号J1、J2的相位差φ1;(5)目标回波与其中一个干扰信号(比如J1)的相位差φ2;(6)2个干扰信号J1、J2到达雷达接收机所构成的张角Δθ。下面将对上述6个参数以及这些参数与干扰空间位置分布等因素进行仿真,得到干扰效果与干扰信号参数之间的对应关系。
2 交叉眼干扰分析
考虑舰载自卫式干扰,2个干扰源分别位于载舰的舰艏与舰尾。此时信号回波近似在2个干扰源中间,即近似满足α=0的状态。下面对典型场景下的交叉眼干扰进行仿真,并分析各参数对干扰效果的影响。
2.1 相位差φ1对干扰效果的影响
仿真参数设置:a=-20 dB(即单台干扰机的干信比为20 dB),Δθ=0.1°,φ2=0,α=0,b=[0.8,0.85,0.9,0.95,1,1.05,1.1,1.15,1.2],天线指向角θ′与b、φ1的关系仿真结果如图2所示。

图2 θ′与两干扰信号相位差φ1的关系
由图2可知:
(1)φ1越接近180°,b越接近1,指向角θ′的值越大,干扰效果越好。
(2) 在b取9个不同值时,φ1在180°附近,天线指向角明显偏出2个干扰源实际构成的张角之外,取得优于非相干干扰的干扰效果。
(3) 在φ1=π附近变化时,天线指向角θ′减小的速度非常快,当相位差φ1偏离π超过5°后,干扰效果就下降很多[4]。

图3 θ′与两干扰信号幅度比b的关系
2.2 幅度比b对干扰效果的影响
仿真参数设置:a=-20 dB(即单台干扰机的干信比为20 dB),Δθ=0.1°,φ2=0,α=0,φ1=[178,178.7,179.4,180.1,180.8,181.5],天线指向角θ′与b、φ1的关系仿真结果如图3所示。
由图3可知:
(1) 在φ1=180°,b≈1.01时,指向角偏差达到最大值,稍微有所偏离b=1是由于目标回波信号引起的。
(2) 在φ1≠180°时,指向角的极大值点所对应的b值也将偏离b=1.01并随着φ1向180°靠近而向b=1.01靠近。
(3) 在φ1=π附近变化时,天线指向角θ′减小的速度非常快,当相位差φ1偏离π超过5°后,干扰效果就下降很多[5-6]。
2.3 幅度比a对干扰效果的影响
仿真参数设置:a=[-25,-20,-15,-10]dB,Δθ=0.1°,φ2=0,α=0,φ1取178°和179°(虚线)2种情况,天线指向角θ′与b、φ1的关系仿真结果如图4所示。
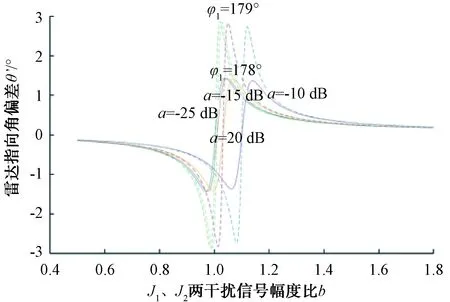
图4 θ′受到回波、干扰信号幅度比a的影响
由图4可知:在φ1接近π时,随着a的增大(干信比减小),为使干扰效果达到最佳,其所对应的两干扰机振幅比b不断远离b=1(b≈1+a)。当φ1不断接近180°时,各个幅度比a条件下总体干扰效果均显著提升。另一方面,随着φ1不断逼近180°,θ′的突变范围变得越来越窄,在突变区间内产生的指向角度偏差变得越来越大(曲线斜率增加)。此时2个干扰信号J1、J2的幅度比b极小的变化都会产生巨大的干扰效果,但一旦离开突变区则会迅速失去干扰作用。这对2台干扰机的幅度控制精度要求很高。为了保证稳定的干扰效果,建议在干扰过程中保持2台干扰机输出波形J1、J2的幅度比b在突变区内进行随机变化。这样不仅使得雷达的指向角偏差处在剧烈变化之中,增加抗干扰难度,同时也避免因信号传播衰减等过程因素导致幅度比b离开突变区域而丧失干扰能力。
仿真参数设置:Δθ=0.1°,φ2=0,α=0,φ1=180°,b=[0.8,0.85,0.9,0.95],天线指向角偏差θ′与a的关系仿真结果如图5所示。
由图5可知,随着a的不断增加(干信比不断减小),雷达指向角偏差θ′不断减小。所以为了达到对单脉冲雷达的干扰效果,需要保证每台干扰机20 dB的干信比。

图5 θ′ 与回波、干扰信号幅度比a的关系
2.4 目标回波偏离两干扰源角平分线程度α对干扰效果的影响
J1、J2干扰波形的角平分线与目标回波信号之间的夹角α为雷达回波与2个干扰机波形角平分线之间的偏差。根据目标RCS在不同照射波形角度下的统计特性,α往往不等于0。该角度的大小反映了上述交叉眼理想数学模型与真实环境下实际干扰情景之间的差距。
仿真参数设置:a=-20 dB,Δθ=0.1°,φ2=0,φ1=180°,b=[0.93,0.94,0.95,0.96,0.97,0.98,0.99],天线指向角θ′与α的关系仿真结果如图6所示。

图6 θ′ 与雷达回波、两干扰波角平分线差值的关系
由图6可知,雷达天线指向角θ′与α成线性关系,且变化范围较小。α对天线指向角的影响效果与b的大小有关,随着b的增大而增大。上述仿真结果表明交叉眼干扰系统具有较好的鲁棒性,即使在真实自卫作战环境下非对称平台的RCS与两台干扰机的角平分线不重合,通过合理调整干信比1/a、干扰信号幅度比b,干扰信号相位差φ1等参数,交叉眼干扰方案依然能够取得与对称平台相当的干扰效果,无需额外调整平台外形设计,降低了对2台分立干扰机的位置装配要求。
2.5 目标回波与干扰信号相位差φ2对干扰效果的影响
仿真参数设置:a=-20 dB,Δθ=0.1°,φ2=[0°,45°,90°,135°,180°],α=0,天线指向角θ′与φ1的关系仿真结果如图7所示。
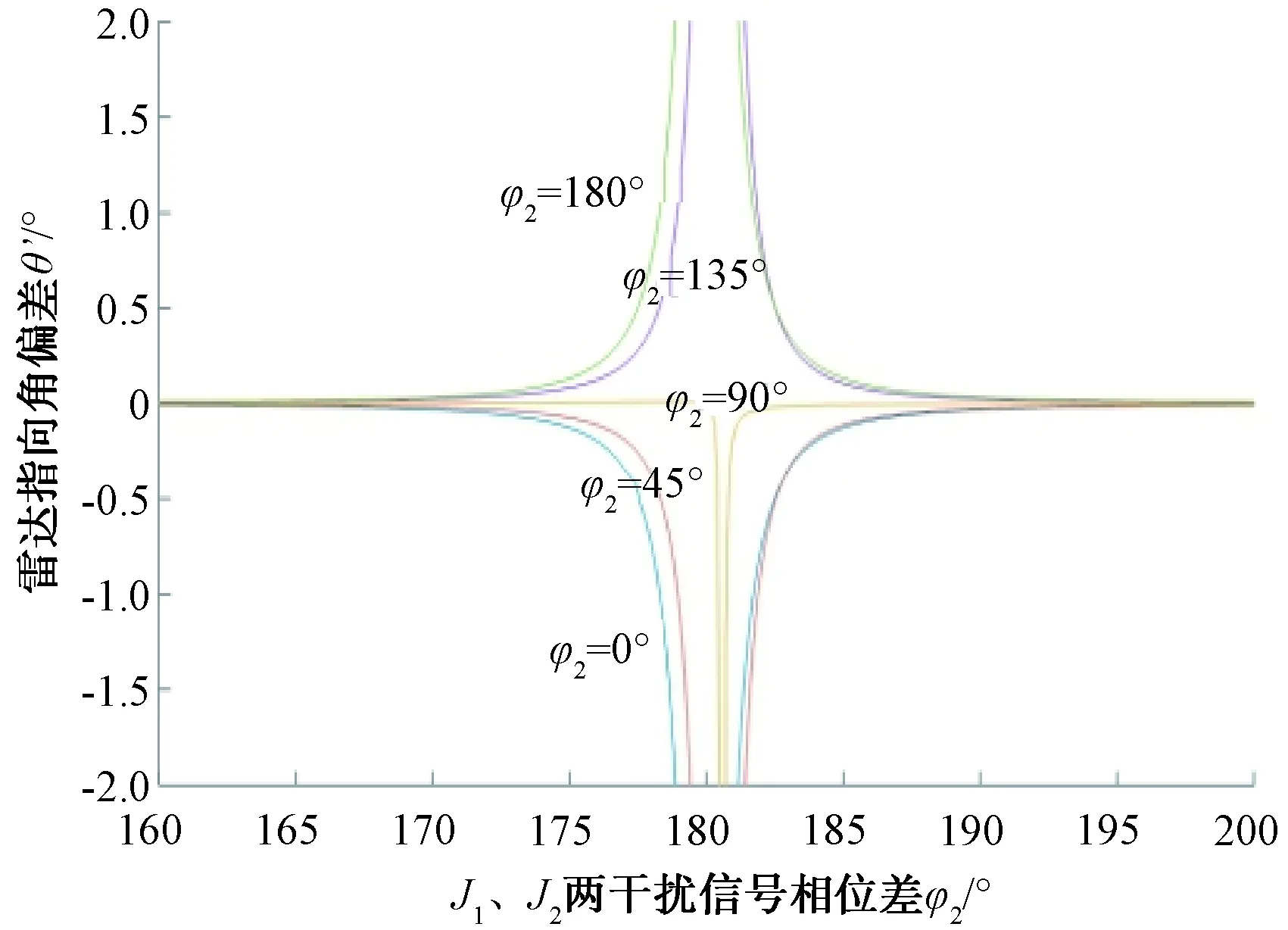
图7 θ′受雷达回波、干扰信号相位差φ2的影响
由图7可知,为了获得较大的雷达指向角偏差θ′,实现更好的干扰效果,J1、J22个干扰信号的相位差φ1通常为π,同时2个干扰信号的幅度比接近1,在此条件下,随着φ2不断接近90°,θ′的突变范围不断收缩并趋向于180°附近一个特定相位值(最佳干扰相位)。这种现象将对J1、J22个干扰信号的相位差带来极大的控制精度要求。当φ2=90°时,φ2只要偏离最佳干扰相位0.1°,就会使得θ′落入非突变区而接近于0,即无干扰效果。所以在实际干扰参数设置中,应该将φ2尽可能控制在远离90°(0°或180°)的状态。
2.6 干扰信号张角Δθ对干扰效果的影响
由式(6)可知,当信号幅度比a、b,相位差φ1、φ2确定的条件下,雷达指向角偏差θ′与J1、J22个干扰信号张角Δθ成正比关系,张角Δθ越大,雷达指向角θ′越大,干扰效果越好。
3 交叉眼空间分布与干扰效果分析
在实际舰载交叉眼干扰系统与敌方单脉冲雷达进行对抗的过程中,与干扰效果直接相关的6个参数会受到干扰距离、干扰机间距、目标姿态角(雷达方位角)等多个因素影响。下面针对上述主要影响因素对雷达指向角偏差θ′进行仿真计算并评估干扰效果。
3.1 干扰距离对干扰效果的影响
在舰载平台尺寸确定、干扰机发射功率不变的条件下,干扰距离将会对J1、J22个干扰信号张角Δθ、干扰信号干信比1/a造成影响,从而产生不同的干扰效果。仿真参数设置:干扰距离R为5 km~30 km,典型舰载平台RCS为5 000 m2,根据常规驱逐舰长度,设2台分立干扰机的距离L=100 m,采用典型单脉冲雷达输出功率Pt=50 kW,其天线增益Gt=25 dB,5 km距离上干信比=1/a=20 dB,φ1=180°,φ2=0°,α=0(理想自卫干扰情景),b=[0.93,0.95,0.97,0.99]。天线指向角θ′与干扰距离R的关系仿真结果如图8所示。

图8 θ′与干扰距离R的关系仿真结果
由图8可知,雷达跟踪天线的指向角θ′随着干扰距离R增大而减小,即在R=5 km时交叉眼干扰效果要明显优于R=30 km的情况。与传统干扰机距离越远干扰效果越好的特点相反,由于干扰距离的缩短能够大大增加J1、J22个干扰信号在单脉冲雷达接收机处形成的张角Δθ,进而大大提升指向角θ′,即显著改进了干扰效果。仿真设置不变,根据式(7)可以计算出典型单脉冲雷达对抗条件下,舰载交叉眼干扰机单台的输出功率为2.51 MW,包含舰艏、舰尾2台分立干扰机的总体干扰系统总输出功率不小于5 MW:
(7)
3.2 干扰机间距L对干扰效果的影响
J1、J22台分立干扰机的间距直接影响了干扰波形到达接收机的张角θ′,进而也直接关系到交叉眼干扰效果。仿真参数设置:干扰距离R为20 km,典型舰载平台RCS为5 000 m2,2台分立干扰机的距离L为10 m~100 m,采用典型单脉冲雷达输出功率Pt=50 kW,其天线增益Gt=25 dB,单台干扰机功率为2.5 MW,φ1=180°,φ2=0°,α=0(理想自卫干扰情景),b=[0.93,0.94,0.95,0.96,0.97,0.98,0.99]。天线指向角θ′与干扰机间距L的关系仿真结果如图9所示。

图9 θ′与干扰机间距L的关系仿真结果
由图9可知,雷达跟踪天线的指向角θ′与两干扰机距离L成线性关系,θ′随着L的增大而增大。在实际交叉眼干扰系统进行位置分布设计时,应该尽可能利用舰船长度,将2台分立的干扰机放置在尽可能互相远离的位置上。
3.3 目标姿态角(雷达方位角)θc对干扰效果的影响
在实际舰船对抗敌方机载、弹载单脉冲测向雷达情景中,雷达相对于被保护对象往往不是垂直正对的,而是成一定的角度θc。对于舰载干扰机平台而言该角度为雷达方位角,对于雷达平台而言该角度为目标姿态角。相比雷达与干扰系统对称轴垂直正对的理想条件,该角度的存在将对干扰系统带来多方面的影响[7]。
首先,根据几何关系,在干扰距离R远大于干扰机间距L的典型对抗场景下,θc将减小J1、J2两干扰波形在雷达接收机处的张角Δθ,进而减小雷达指向角θ′,削弱干扰效果。在典型自卫干扰情景下(α=0),θ′与θc的关系为:
(8)
由上式可知,姿态角将2个分立干扰机之间的有效间距缩小为原来的cosθc倍。
除了有效间距外,对干扰信号之间以及干扰信号与回波信号之间的相位差会产生影响。这种影响会根据交叉眼干扰系统的接收机、发射机设置而不同,下面对非反向交叉眼干扰系统和反向交叉眼干扰系统进行分类讨论。
(1) 非反向交叉眼干扰系统
这种类型的干扰系统中使用1台公共接收机,2台分立干扰机的波形输出来源于这台接收机的截获信号。假设接收机截获雷达信号的时刻信号相位即为雷达回波的初始相位,记为φ0,该信号经过接收机数字储频、转发,一路沿长度为L/2信号电缆传输给J1干扰机。J1干扰机在接收到信号后立刻进行干扰信号的放大输出,之后经过R1的空间距离传播达到单脉冲雷达的接收机内,此时相位φJ1为(忽略上述过程中的相位偏移误差):
(9)
交叉眼系统的接收机信号在另一路通过长度为L/2的信号电缆后,再经过1个移相器传输给J2干扰机,移相器造成的相位变化即为Δφ。由于姿态角的存在,当干扰信号到达雷达接收机时,干扰机J2的信号相比J1在空间中需要额外传输Lsinθc的距离。由于2台分立干扰机的信号输入源相同,即起始相位均为φ0,所以J2干扰信号到达雷达接收机时刻的相位φJ2为:
(10)
联合式(9)、(10),可求得式(6)交叉眼模型中φ1、φ2的值为:
(11)
(12)
根据前文的分析,为了获得足够的干扰效果,φ1应当尽量趋近π,φ2应当为0或π。由于φ1的值与姿态角θc有关,所以需要根据干扰系统接收机的θc输入,通过移相器改变相移Δφ配合该值,保证在干扰过程中φ1的值稳定维持在π。
(2) 反向交叉眼干扰系统
这种类型的干扰系统中每一台干扰机都连接一台分立的接收机,且匹配一台干扰机的接收机其空间位置与另一台干扰机相同。每台干扰机的干扰信号发射取决于各自对应的接收机对雷达波的截获。在单脉冲雷达的对抗情景下,以雷达脉冲发射作为起始时刻,忽略数字储频、转发过程中的相位偏移误差与2路传输电缆的长度误差,则J1、J22个干扰波形从雷达波形发射到分别被各自接收机截获、存储、转发,再到经过长度L的线缆传输至发射机,最终再回到雷达接收机,2条链路经过的距离相同,均为R1+R2+L。所以φ1=Δφ=π与姿态角θc无关,无需动态调整。同时,干扰系统2台分立接收机的截获信号相位差为Lsinθc。利用该值可以辅助判断敌方单脉冲雷达的方位。
(3) 舰载干扰盲区
根据上文分析,为了追求尽可能好的干扰效果,需要提高2台分立干扰机的间距L,所以交叉眼干扰系统通常布置在舰载平台舰艏与舰尾2个地方。为了保护舰船左右两舷,需要2套阵面背靠背互成180°放置,如图10。由于敌方雷达的方位角θc会影响干扰效果,所以当方位角θc达到一定值之后,交叉眼干扰效果将无法满足对抗要求,所以将形成干扰盲区,如图11。另外,由于舰船的上层建筑遮挡,也会造成干扰盲区。实际交叉眼干扰系统的盲区取上述2种盲区并集,所以为了尽可能减小上层建筑的遮挡,交叉眼干扰阵面应尽量放置在靠近船舷边缘的位置。

图10 舰载交叉眼系统配置示意图

图11 舰载交叉眼系统干扰盲区
4 结束语
交叉眼干扰是针对机载、弹载单脉冲测角雷达的一种有效的相干干扰方案。其利用在空间距离上分立的2台干扰机设备,对接收机截获并数字存储的雷达信号波形进行精确的相位延迟控制,之后进行相干转发。单脉冲雷达接收机和差通道在同时接收干扰信号与雷达回波信号后,其雷达指向角误差信号将受到干扰信号的调控,最终导致误差信号为0时真实目标方位与雷达指向角存在大角度偏差,实现方位测角干扰偏离。
交叉眼干扰技术中,主要有5个参数对干扰效果产生影响,分别为两干扰设备输出信号波形的幅度比、干扰信号的干信比、两干扰信号的相位差、干扰信号与回波信号的相位差、两干扰波形到达雷达接收机的张角。为了达到理想的干扰效果,需要将2个干扰信号波形的相位差尽可能精确地控制在180°,2个干扰信号的幅度比应尽可能控制在1,干扰信号与回波信号之间的相位差应尽量远离90°,干信比和信号构成的张角应尽量大。
根据上述干扰效果与干扰系统参数之间的关系,构建实际舰载交叉眼干扰设备的注意点包括:为了最大化信号张角,应尽可能充分利用舰载平台的长度,2个分立干扰阵面建议放置于舰艏与舰尾,且在左舷和右舷各需要一对阵面以保障防护空间范围;为了保证两干扰信号的相位差严格为180°,除使用精度较高的移相器外,对于共用接收机的非反向交叉眼系统,需要根据雷达侦测的方位角进行相位补偿。另外,由于交叉眼干扰的容限较窄,当系统参数在容限内时可以达到很高的干扰质量,而一旦超出容限干扰效果又会迅速消失,故可以对干扰参数(比如两干扰信号幅度比)在容限范围内进行随机振荡,尽可能减少干扰系统出离容限的概率,同时通过对干扰信号的随机调制,在一定程度上也提高了敌方的抗干扰难度。
由于2个干扰信号在敌方雷达接收机处的相位差为180°,存在抵消效应,为了掩盖雷达回波,交叉眼干扰信号所需的干信比较大,通常不小于20 dB,而且干扰系统包含2台分立干扰机,整套系统的功率要求较高。以典型弹载单脉冲雷达作为对抗对象进行估算,为了防护RCS为5 000 m2的舰船,需要交叉眼干扰系统的输出功率为5 MW(单台2.5 MW)。
根据上述分析,对抗目标的方位角会减弱干扰效果,在方位角达到一定程度之后,干扰效果将小于设计预期,无法实现干扰目的,所以在舰载平台上交叉眼系统存在干扰盲区。盲区为以舰船中心纵轴为对称轴、以左右舷阵面中心为起点、张角为2倍最大可对抗方位角余角的扇形区域,即正对船艏与船尾附近的方位是交叉眼干扰防护的薄弱环节,需要舰上的其他设备进行配合防护。