电子对抗无人机作战目标威胁评估
2020-11-26孙和强赵国林唐飞飞
孙和强,赵国林,唐飞飞,王 强
(空军预警学院,湖北 武汉 430019)
0 引 言
在未来空中作战中,战斗机在执行各种作战任务时,将同时面对上百部雷达的照射,这将对战机的生存构成极大的威胁。电子对抗无人机由于零伤亡、费效比高、持续作战能力强、作战效果好等优点,成为空中典型的电子进攻作战力量重要组成部分,在未来信息化空中作战中,为确保战机安全执行作战任务时发挥了重要作用。随着高技术在电子战领域的发展与进步,电子对抗无人机集群作战将成为未来无人机作战的主要作战样式,而电子对抗无人机作战目标协同分配将成为电子对抗无人机集群作战的重点研究方向,通过对电子对抗无人机作战目标威胁进行评估,可以科学高效地对电子对抗无人机打击力量进行编组,有助于有效地发挥电子对抗无人机集群作战效能。
作战目标威胁评估是电子战制定干扰决策、进行干扰资源分配的前提。电子对抗作战目标选择是电子对抗作战决策的重要环节,通过对作战目标威胁进行准确评估,判定目标威胁等级,可以辅助指挥员精准选择目标和打击顺序,提高电子对抗无人机作战效能[1]。本文以空袭作战中电子对抗无人机执行电子对抗支援行动为战术背景,重点关注雷达对抗无人机和反辐射无人机2种主要机型的作战目标威胁分析,基于模糊层次分析法,采用定性与定量相结合的方式,实现对作战目标威胁程度的量化评估[2]。
1 构建目标威胁评估指标体系
在空袭作战中,空袭飞机在突击突防中被敌方防空体系中警戒引导雷达发现,将基本信息传递给防空导弹制导雷达或战斗机火控雷达,最终引导敌方实施火力拦截。由此可见,电子对抗无人机执行电子对抗支援作战任务时,主要作战目标是敌方防空体系中的各类型雷达目标,降低敌防空体系雷达作战性能,掩护我空袭飞机完成作战任务。图1给出了多层次评估指标体系结构。按空袭作战要求,目标雷达威胁程度可分为任务要求、生存威胁和发现威胁3个主要因素[3],如图1所示。

图1 作战目标威胁评估指标体系
任务要求包括任务目标、目标类型和暴露时间,其中目标类型有远程警戒引导雷达、地面制导火控雷达、舰载雷达、预警机机载雷达、战斗机火控雷达等;暴露时间指空袭飞机在某目标雷达探测范围内暴露的时间。生存威胁是目标雷达在防空作战中引导防空武器系统或战斗机发现、跟踪、击毁空袭目标的综合作战能力,主要包括杀伤范围、毁伤概率和跟踪能力3个因素。发现威胁是目标雷达发现空袭目标的能力,主要包括发现时间、作用距离、探测精度和工作状态几个因素,其中工作状态有静默、搜索、跟踪、瞄准和制导等[4]。
2 确定作战目标威胁评价矩阵
在目标雷达威胁评估指标体系中,因素数值的大小不同对目标雷达威胁程度的影响也不同,因此本文引入模糊隶属度的概念,对各个因素数值进行归一化处理,可以得到目标威胁评价矩阵,模糊隶属函数如下[2]:
(1)
式中:gs为指标因素模糊隶属度;fs为因素数值(ms≤fs≤Ms);Ms为理想最大值;ms为理想最小值;ft为最理想的适中值。
式(1)中的3种情况是:(1)因素数值越高,目标雷达威胁度越高;(2)因素数值越贴近理想适中值,目标雷达威胁程度越高;(3)因素数值越小,目标雷达威胁度越高。
任务目标采用“1”和“0”表示,分别代表任务中已明确的目标和任务中未明确的目标。
各指标经过模糊处理后,可得到作战目标的威胁评价矩阵:
G=(gij)n×m
(2)
式中:gij表示第i部雷达对第j个因素的模糊隶属度。
3 层次分析法确定各因素权重[2]
3.1 建立层次结构模型
根据战术背景任务和层次分析法的要求,建立作战目标威胁评估体系,如图1所示。
3.2 构造判断矩阵
根据萨蒂提供的同级因素两两比较时相对偏好判断的九级标准,采取同级因素两两比较建立判断矩阵,并采用数字1~9作为因素相对偏好的定量赋值,如表1所示。
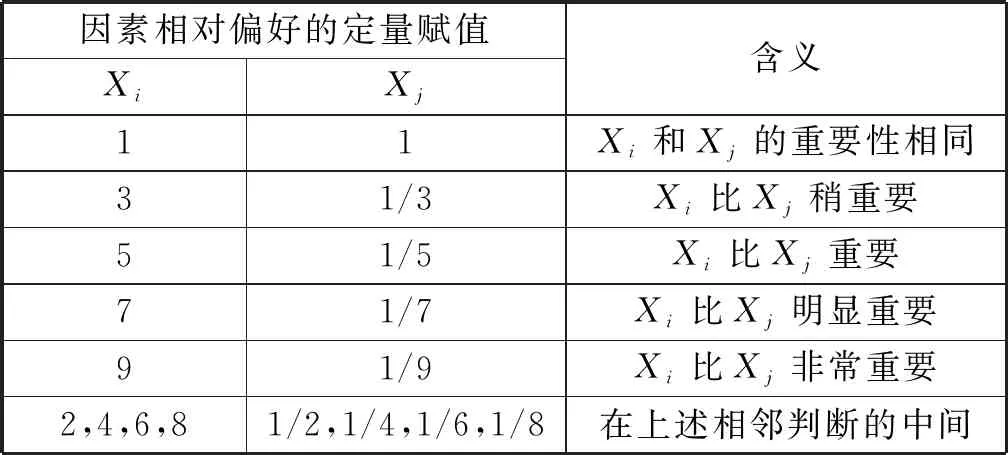
表1 因素两两相比较时相对偏好判断的九级标度
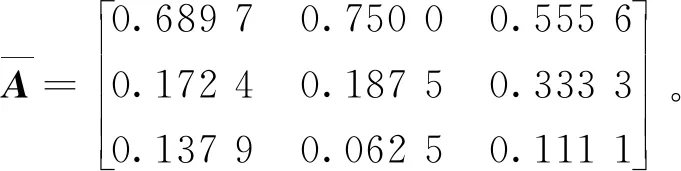
综合军事专家和部队指挥员的调查统计数据,采取专家打分的方式,得到准则层B各因素相对于目标层A的判断矩阵:

同理我们可以得到准则层C各因素对准则层B各因素的判断矩阵,如下所示:
3.3 确定各层级的权重系数
以判断矩阵A为例,采用规范列平均法,计算矩阵特征值和特征矢量。
根据下式对判断矩阵A中的各列进行如下规范化:
(3)
得到矩阵:
(4)
根据如下公式:
(5)
Wi即为判断矩阵A的特征矢量,W=[w1,w2,…,wn]T的第i个分量。

计算判断矩阵A的最大特征值可用下列公式:
(6)
式中:(AW)i为向量AW的第i个分量。
可得到:αmax=3.087 1。
按照相同的步骤,可得到判断矩阵B1、B2和B3的特征向量及最大特征值分别为:
W1=[0.639 3,0.273 7,0.086 9]T,αmax1=3.054 1
W2=[0.648 0,0.122 2,0.229 9]T,αmax2=3.013
W3=[0.185 7,0.251 5,0.099 4,0.463 4]T,
αmax3=4.125 5
3.4 一致性检验
对判断矩阵进行一致性检验,使用判断矩阵偏离一致性的相对指标,利用下列公式计算:
(7)
式中:IR为随机一致性指标,可通过查表得到。
IC=(αmax-n)/(n-1)
(8)
式中:IC为相容性指标,当RC<0.1时,符合一致性要求;反之,当RC>0.1时,则应重新进行元素的两两比较,对已建立的判断矩阵进行修正。
经计算可得:RC=0.075<0.1;RC1=0.047<0.1;RC2=0.022<0.1;RC3=0.046<0.1。
因此,这4个判断矩阵符合一致性要求,是可以接受的。
3.5 进行层次综合
在计算准则层的权重系数后,还需要计算所有指标对总目标的权重系数,这里采取自上而下的层次综合,计算公式如下:
ϖi=Wi×W,i=1,2,3
(9)
式中:Wi为准则层B各要素Bi(i=1,2,3,4)对目标层A的特征值;W是以准则层C对准则层B的特征矢量中各分量Wij为列组成的矩阵,即为:
W=[0.639 3 0.273 7 0.086 9 0.648 0 0.122 2
0.229 9 0.185 7 0.251 5 0.099 4 0.463 4]T
由此可得到准则层C对目标层A的特征矢量:
ϖ=[0.425 2 0.182 0 0.057 8 0.149 8 0.028 2
0.053 1 0.019 3 0.026 1 0.010 3 0.048 1]T
3.6 目标雷达威胁程度综合评估
采用模糊层次分析法评估目标威胁程度主要是确定模糊判断矩阵和各指标的权重。由前节已计算出各指标的权重,将作战目标的威胁评价矩阵与各指标权重向量相乘即可得到目标雷达威胁程度综合评估:
R=Gϖi
(10)
式中:G可由式(2)计算得出;ϖi为各指标相对于总目标的权重系数。
4 实例分析
假设在某次空袭作战任务中,空袭飞机编队需要穿越由远程警戒雷达、预警机机载雷达和地面防空系统所属的各型雷达构成的防空反导雷达网,其各目标雷达的指数数值如表2所示。
将各指标按公式(2)计算后进行模糊归一化处理,其中任务目标、目标类型可以直接使用,工作状态指标中威胁程度排序为:制导>跟踪>搜索>静默。发现时间、探测精度数值越小,目标威胁程度越高;暴露时间、杀伤范围、毁伤概率、跟踪能力、作用距离数值越大,目标威胁程度越高。可以得到目标雷达的威胁程度评价矩阵为:

表2 目标指数数值

根据3.5节得到的准则层C各元素对目标层A的权重系数,根据公式(10)可得到各目标雷达的威胁程度为:
R=[0.137 1 0.922 2 0.213 4

可以得出6个目标雷达的威胁排序为:目标2>目标4>目标6>目标3>目标5>目标1,即用于制导、火控的雷达威胁程度最高,而用于搜索警戒的雷达威胁等级较低,此结果与实际作战中的一般经验和事实吻合[5]。
5 结束语
本文以空袭作战中电子对抗无人机执行电子对抗支援作战为战术背景,运用模糊层次分析法,分析了雷达对抗无人机和反辐射无人机2种主要电子对抗无人机作战目标雷达的威胁程度,并通过实例计算和分析,验证了该方法的有效性和可行性,为作战指挥员的指挥决策提供了依据。
