基于VC6.0的相控阵雷达视频仿真系统
2020-11-26刘德龙
张 琛,刘德龙,戴 健
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
雷达的工作原理是辐射电磁能量并检测反射体反射回波,通过对回波信号中的时间、回波到达角等参数的计算可以得到目标的距离、方位等信息[1]。
相控阵雷达天线具有波束快速变化的特点,易于形成多个波束[2]。本文针对相控阵雷达体制,根据雷达点迹处理的要求,针对相控阵雷达特征,对雷达视频进行方位向、俯仰向上的模拟,同时进行距离上的分裂模拟,以达到尽可能接近真实环境的视频仿真效果。
1 问题描述
为了更好地验证点迹提取、凝聚算法的真实可行性,本文介绍了基于相控阵雷达的视频模拟器的算法实现,该模拟器在方位向以及俯仰向上的视频分布符合相控阵雷达天线方向图。当按照天线扫描区域构建完雷达视频回波数据之后,将回波数据以网络报文形式发送给数据处理模块进行算法的验证。
仿真系统基于VC6.0,通过图形界面输入模拟目标的距离、方位、仰角、航速、航向、俯冲角等参数,系统根据目标参数构建目标航路,根据扫描周期、波束间隔将航路分割成点迹,再将点迹按照雷达工作频率、波束宽度、波束步进、扫描周期、扫描方式等相关区域参数分解成相应的回波幅度信息。
同时,在系统中内嵌了常用的雷达命令功能:雷达二次命令(航迹的撤批、改批等)、雷达录取回放功能。本系统作为验证相控阵雷达点迹数据处理、航迹数据处理的输入源已经得到了深入的验证。在处理过程中通过本系统模拟出视频、点迹,以网络形式将相应的数据发送给数据处理。
仿真系统可以通过自建航迹来达到分解航迹的目的,根据项目需求,系统可以模拟径向运动目标、静止目标、圆周运动目标、3G加速度目标以及多批目标运动静止等等,以此多方面地验证雷达数据处理算法的可行性。同时系统接收数据处理分机发送的点迹航迹数据,并在显示屏以及列表中显示。
2 视频模拟算法
2.1 系统算法概述
仿真系统通过对雷达传播方程的模拟,来实现对目标方位俯仰距离上的分裂,从而形成视频回波。
本文以相控阵雷达的一种扫描方式(先方位扫后俯仰扫)为例,分析视频仿真算法,其他扫描方式类似。仿真系统工作流程如图1所示。点迹解算流程图如图2所示。视频解算流程图如图3所示。

图1 仿真系统工作流程图
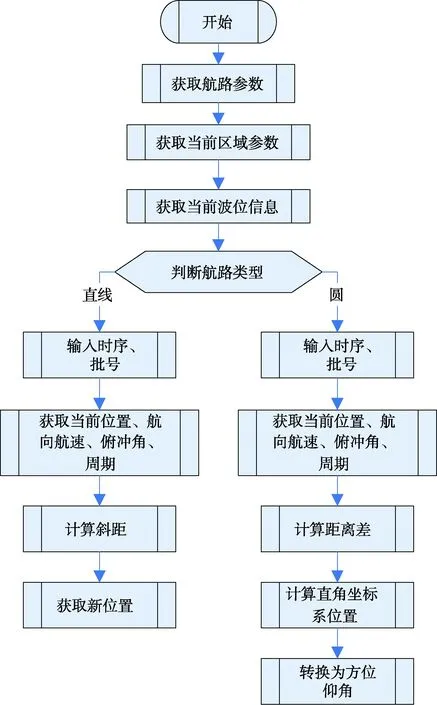
图2 点迹解算工作流程图
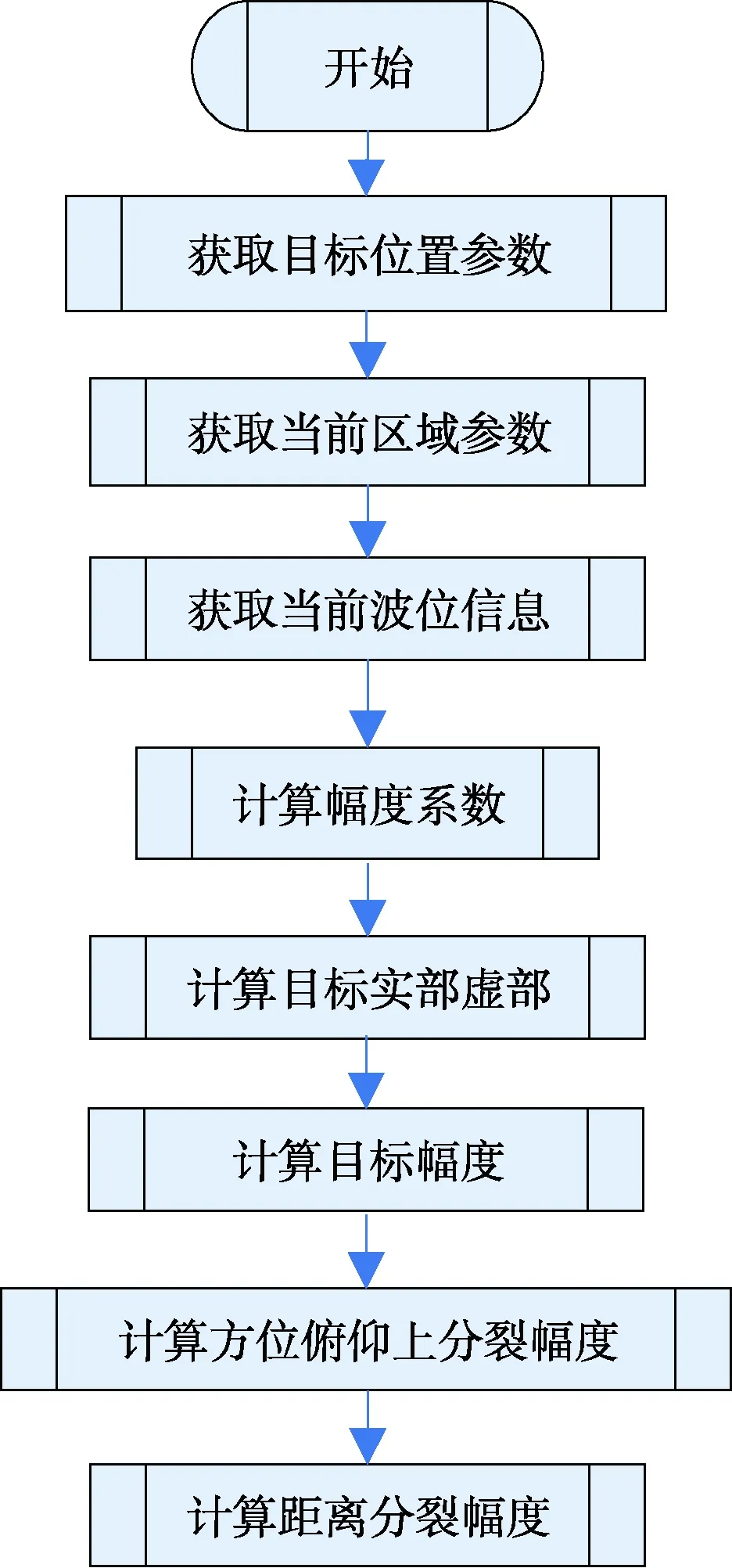
图3 视频解算工作流程图
要想做好视频仿真工作,首先要了解相控阵点迹处理的详细算法。在雷达工作时,天线按照波位扫描,扫描到目标时返回回波。由于波位扫描到目标的角度不同,因此产生的回波能量也不同。在波位分布不是太分散的前提下,点迹处理在方位向和俯仰向上多波位接收到的视频会形成抛物线轨迹,抛物线的顶点即可认定为目标所在位置。
以此为依据,结合目标运动规律、雷达方程、雷达工作参数,即可得到目标的幅度值。
2.2 点迹位置解算
2.2.1 直线题
首先计算出当前区域的相邻波束时间:
(1)
式中:ts为当前区域扫描周期;Na为当前区域方位向上的波束个数;Ne为当前区域俯仰向上的波束个数。
当前目标水平速度为:
Vh=Vcosθfc
(2)
当前目标垂直速度为:
Vv=Vsinθfc
(3)
式中:V为当前目标速度;θfc为当前目标俯冲角。
一个天线周期运动所经过的路程在水平面上的分量为:
Sh=VhtminNb
(4)
一个天线周期运动所经过的路程在垂直面上的分量为:
Sv=VvtminNb
(5)
式中Nb为当前波位个数。
当前最新时刻的水平距离为:
(6)

当前最新时刻的垂直距离为:
(7)
当前仰角值:
(8)
当前方位值:
(9)
式中:δ在顺时针时为1,逆时针时为-1,径向为0。
由此可以计算出当前时刻目标所在位置,即目标点迹。
2.2.2 曲线题
将航路投影到直角坐标系。首先将航路投影到yz平面(假设原点位于圆心,随后再转换回来):
Dyz=Rcos(θa+Δθ)
(10)
式中:Δθ为2次计算的方位差。
目标在Z坐标中相邻2次运动的距离差为ΔZ=Dyzsin(θfc),其中θfc为当前目标俯冲角。
目标当前的距离:
(11)
目标相对坐标为:
(12)
转换为目标真实坐标:
(13)
最后再将直角坐标系转换为目标的方位、仰角、距离:
(14)
由此即可得出目标新的方位、距离、仰角。
2.3 视频解算

由Kerr提出的单基地雷达(发射接收同基地)方程[3]:
(15)

根据幅度系数、当前波位的波束指向、目标的位置即可得出目标在当前波位对应的幅度。
首先仿真出目标的实部、虚部[4]:
cosθecsinθac)+kDl(sinθe-sinθe)))
(16)
cosθecsinθac)+kDl(sinθe-sinθe)))
(17)
当前波位视频幅度:
(18)
式中:Dr、Dl为行列单元的间距;θe、θa为目标的方位、仰角;θec、θac为当前波束的波束指向。
在使用时,可根据真实目标回波幅度大小的不同对幅度值进行相应的扩大缩小。
模拟5个接收波束,分别为中心波束、方位向上左右两波束、俯仰向上上下两波束。结构如图4所示。

图4 5个接收波束排列方式
在计算目标在其他4个波束上的回波幅度值的时候,只需要将θec、θac增加或减少相应的波束间隔即可。
之后为了验证数据处理的距离凝聚,将目标在距离向上进行分裂即完成视频仿真。
3 模拟视频效果
方位向、俯仰向的仿真结果(波束宽度2°,方位俯仰步进5°,方位向上17个波束,俯仰向上3个波束,共51个波束)如图5~图7所示。
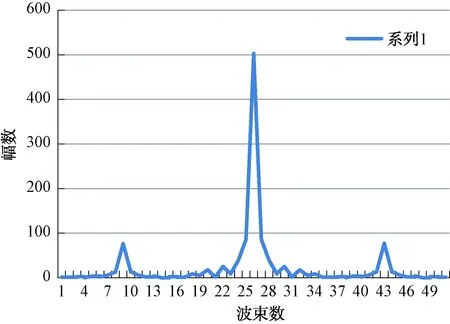
图5 一个周期内各个波束上的视频分布
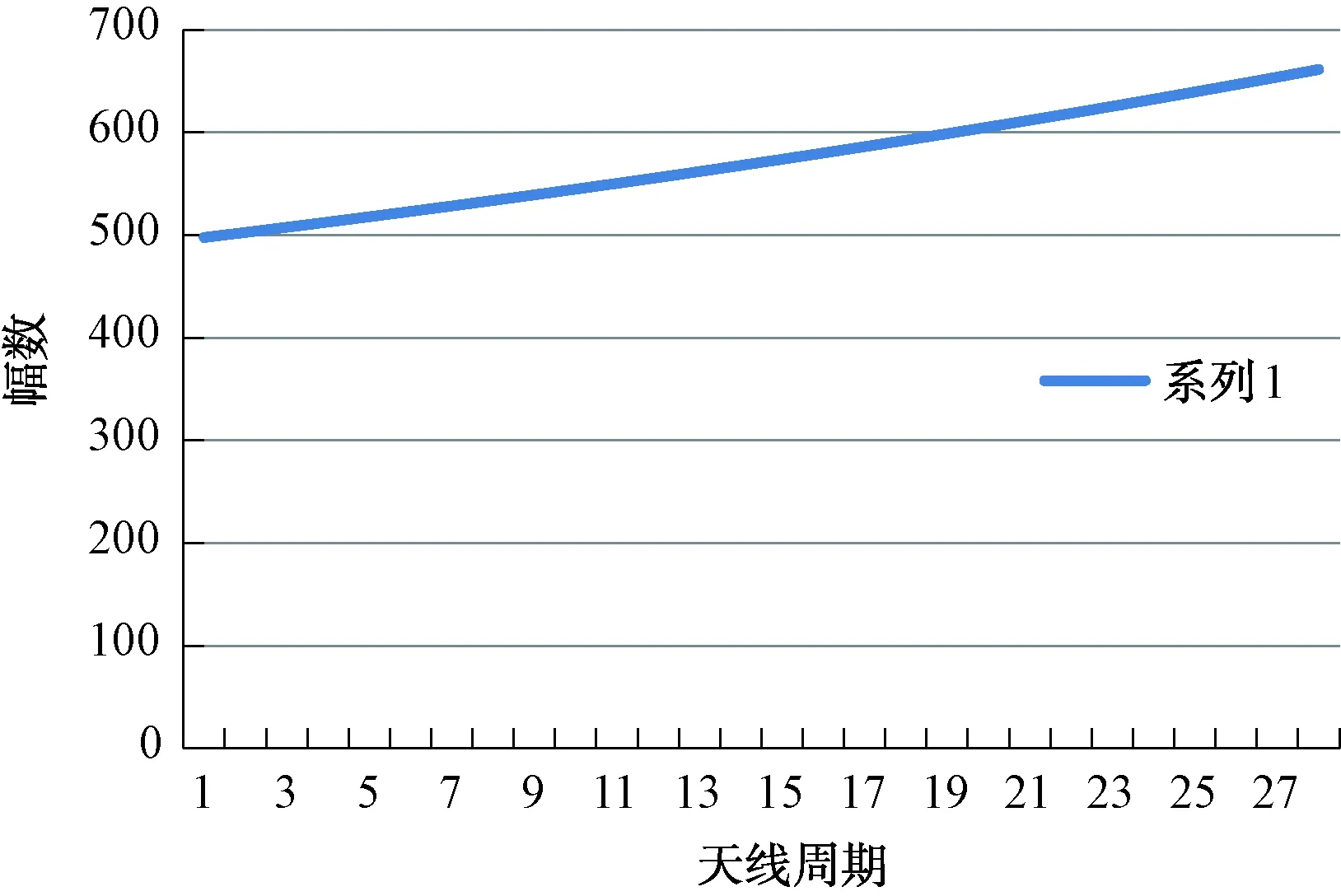
图6 径向向内目标不同周期幅度变化

图7 3G加速度仿真与验证结果
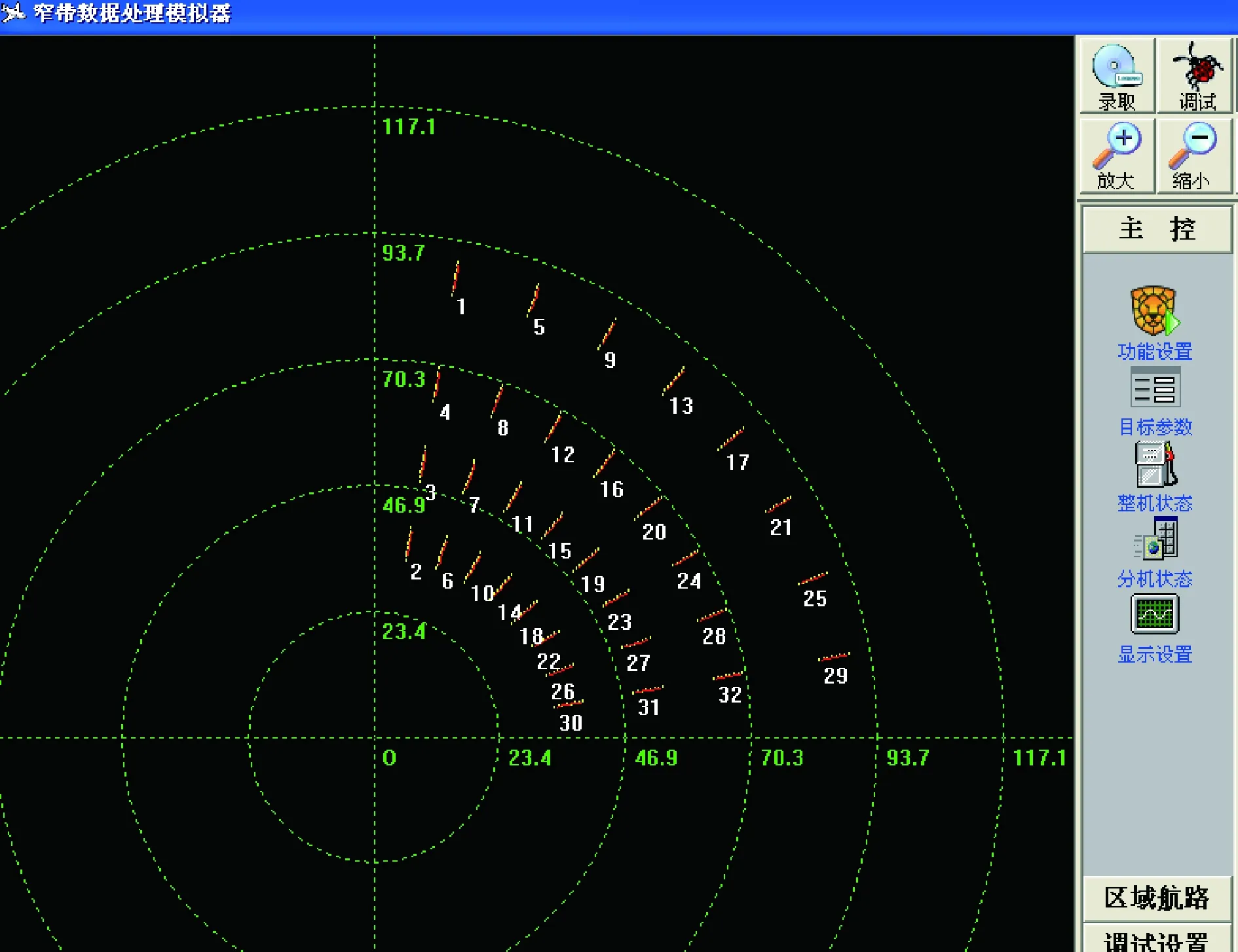
图8 32批径向目标仿真与验证结果
4 结束语
本文主要介绍了相控阵雷达视频仿真的整个流程,分析了点迹解析、视频解析,对距离、方位、俯仰分裂等问题作了详细的研究说明,最后对视频仿真结果进行了验证,同时利用将仿真结果通过数据处理进行真实性验证。
