水下滑翔机半实物仿真系统设计与实现
2020-09-07潘昊东王志光刘纯虎
潘昊东, 王志光, 刘纯虎, 连 琏
水下滑翔机半实物仿真系统设计与实现
潘昊东, 王志光, 刘纯虎, 连 琏
(上海交通大学 海洋工程国家重点实验室, 上海,200240)
为提高水下滑翔机的研究开发效率, 降低研发成本, 文中设计了一种水下滑翔机的半实物仿真系统。该系统首先仿真水下滑翔机水下运动时的运动状态及水下环境等信息, 然后将其送入水下滑翔机的主控系统, 主控系统输出对应的控制信息, 再经由仿真系统采集处理后送入系统管理软件保存, 方便用户对控制过程进行分析处理。最后, 主控系统通过RS232串口将数据上传到数据接收处理软件, 以仿真水下滑翔机与岸站的通信过程。通过相关测试可知, 文中设计的半实物仿真系统可高效完成水下滑翔机控制系统、通信系统等的工作任务, 满足设计要求, 显著降低了研发成本, 具有理想的应用前景。
水下滑翔机; 半实物仿真; 数据接收处理; 主控系统
0 引言
水下滑翔机作为一种新型的海洋观测平台, 通过改变自身浮力来提供驱动力, 采用内置的姿态调整机构改变姿态, 并利用水平翼产生前进的推力, 以实现滑翔运动。其具有噪声低、能耗小的特点, 可携带测量海水温度、盐度和深度等参数的传感器进行持续海洋观测, 时间可长达几个月, 航程可达上千海里, 这使得水下滑翔机的研发在国内外都备受重视[1]。
目前, 国外研究机构已研发出Seaglider和Tsukuyomi等水下滑翔机[2-3], 国内学者也研发出Petrel和Seagull等水下滑翔机[4-5]。近年来, 水下航行器半实物仿真研究不断深入, 张禹等[6]搭建了自主水下航行器(autonomous undersea vehic- le, AUV)半实物仿真平台, 进行AUV的实时仿真和研制工作; 赵加敏等[7]搭建了遥控水下航行器(remotely operated vehicle, ROV)集成仿真系统, 可以较为真实地模拟ROV的工作过程; 甘永等[8]搭建的水下机器人半实物运动仿真系统, 可以验证系统的硬件体系、数据接口和可靠性。现有水下机器人的仿真系统可以用于特定AUV、ROV等的仿真, 但针对水下滑翔机特殊的运动形式、通信模式及所采用的硬件设备已不能很好地满足其仿真要求。
针对水下滑翔机所采用硬件设备的开发、独特运动形式下的控制系统设计、特殊通信模式的测试等, 文中设计了一种水下滑翔机的半实物仿真系统。通过主控系统采集处理水下滑翔机水下环境以及运动状态等信息, 并上传到数据接收处理软件, 仿真水下滑翔机与岸站的通信过程, 可以实现水下滑翔机控制系统、通信系统的仿真测试。该系统可以大大提高水下滑翔机的研发效率, 显著降低其研发成本。
1 系统总体结构
水下滑翔机半实物仿真系统总体结构如图1所示, 具体包括虚框外主控系统的实物仿真部分和虚框内的仿真系统、仿真系统管理软件及数据接收处理软件组成的虚拟仿真部分。
其中在主控系统上可以进行水下滑翔机的运动控制仿真、各类搭载传感器数据采集的仿真和与岸站进行通信的仿真等实物仿真。成功仿真后主控系统的备份可以直接用于水下滑翔机的控制。虚拟仿真部分主要由可以仿真科学传感器系统、航行传感器系统、应急处理系统、运动控制系统、全球定位系统(global positioning system, GPS)模块的仿真系统和安装在计算机上的仿真系统管理软件及数据接收处理软件组成。水下滑翔机搭载的各类传感器模块都通过仿真系统仿真实现, 能节省大量用于采购传感器、通信设备等的经费, 也能快速进行各模块的更新与改进。数据接收处理软件与主控系统相互配合仿真水下滑翔机的通信过程, 并且对数据接收处理软件稍做改进, 即可作为实际水下滑翔机的岸站数据接收处理软件。

图1 半实物仿真系统总体结构图
文中针对水下滑翔机所搭载电导率-温度-深度(conductivity-temperature-depth, CTD)传感器、倾斜补偿三轴罗盘模块(tilt compensated 3-Axis compass module, TCM3)姿态传感器等硬件设备的开发均通过仿真系统实现。在主控系统中, 针对水下滑翔机的“锯齿形”运动进行其控制算法的设计。水下滑翔机半实物仿真系统可以完成水下滑翔机的控制系统、通信系统及所搭载传感器数据接口等的仿真测试。具体仿真过程为: 通过仿真系统管理软件配置水下运动时水下环境、水下滑翔机运动状态等信息, 并由仿真系统将这些信息送入水下滑翔机的控制器, 控制器输出对应的控制信息, 再经由仿真系统采集处理后送入仿真系统管理软件保存。最后, 主控系统与数据接收处理软件进行通信, 仿真水下滑翔机与岸站接收机的通信过程。
2 系统硬件结构
水下滑翔机半实物仿真系统的硬件结构, 由虚线框内的虚拟仿真部分和虚线框外的实物仿真部分组成, 如图2所示。虚拟仿真部分由一台计算机和一款STM32F429开发板构成。计算机上安装仿真系统管理和数据接收处理两款仿真软件。仿真系统以STM32F429开发板作为硬件平台, 此硬件平台包含计算处理模块、串口通信模块、A/D和D/A转换模块等, 可以满足GPS仿真模块、科学传感器仿真系统、航行传感器仿真系统、应急处理仿真系统和运动控制仿真系统等的需求。

图2 半实物仿真系统硬件结构图
实物仿真部分的主控系统由计算处理模块、电源转换模块、串口通信模块、A/D转换模块、电机驱动模块和数据存储模块等部分组成, 并通过RS232串口、A/D、D/A等硬件接口与虚拟仿真部分连接, 从而可以完成水下滑翔机的运动控制、与岸站接收机通信、传感器数据采集和存储等任务。
3 系统软件设计
3.1 主控系统软件设计
水下滑翔机主控系统软件基于Keil uVision5, 并使用FreeRTOS(嵌入式实时操作系统)进行开发。主控系统软件具体流程如图3所示。
主控系统软件首先进行系统时钟、中断和外设等初始化工作; 然后等待接收用户的控制命令, 接着根据接收到的控制指令执行浮力调节、俯仰调节、锯齿形周期运动、科学传感器数据采集及应急处理等任务; 最后, 当水下滑翔机处于水面通信状态时, 会给通信模块上电, 执行数据上传任务。
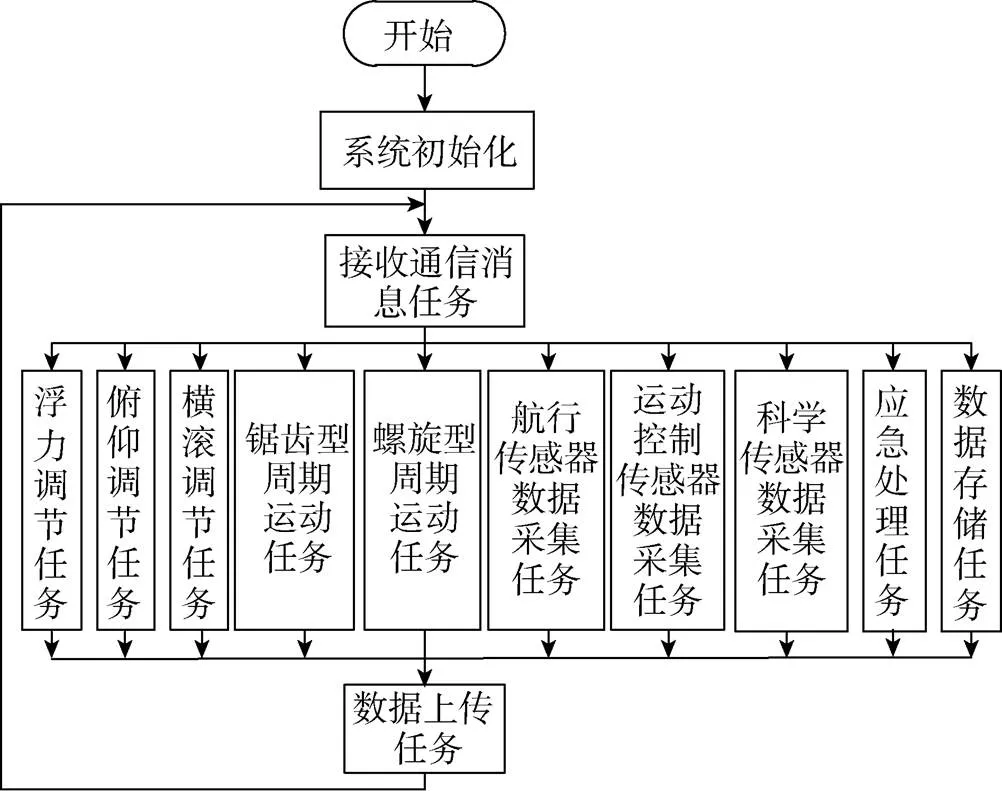
图3 主控系统软件流程图
面对水下恶劣危险的环境, 主控系统软件设计在满足水下滑翔机控制、数据采集和通信等基本任务要求的同时, 必须有足够的健壮性和可靠性。目前水下滑翔机在面临危急状况时, 大多采用抛载机构抛弃重物来保障水下滑翔机的安全, 在主控系统软件设计时, 针对危急状况的处理包括了超深抛载、超时抛载、漏水抛载、欠电抛载、通信超深抛载及系统错误抛载等多种状况。例如, 系统错误抛载是通过主控板与抛载控制板每隔一段时间进行通信一次, 超过设定时间, 主控板未与抛载板进行通信, 则认定系统出错误, 抛载板控制抛载机构立即抛载, 以此来保障水下滑翔机的安全。
3.2 仿真系统软件及仿真系统管理软件设计
仿真系统软件和仿真系统管理软件分别基于KeiluVision5、Visual Studio 2010进行开发, 其中Visual Studio 2010既具有强大的数据处理能力, 又具有便捷的界面设计功能, 可以满足仿真系统管理软件的开发需求。仿真系统软件与仿真系统管理软件之间的数据流程图和仿真系统管理软件分别如图4和5所示。
水下滑翔机主控板通过仿真系统板通知仿真系统管理软件仿真开始, 然后仿真系统管理软件读取包含水下环境、水下滑翔机状态等参数的配置文件(通过水下滑翔机数学建模或试验获得), 将配置文件信息依次通过串口发送给仿真系统板进行水下环境、滑翔机状态等状况的仿真, 并将相关仿真信息送入水下滑翔机的主控系统。而后仿真系统板采集水下滑翔机的控制信息, 如俯仰、横滚机构的控制信号等, 并将采集到的信息发送到仿真系统管理软件进行存储。用户也可以通过仿真系统管理软件设置水下滑翔机漏水、超深等突发状况, 以此来测试水下滑翔机控制系统的应急处理功能是否满足设计要求。
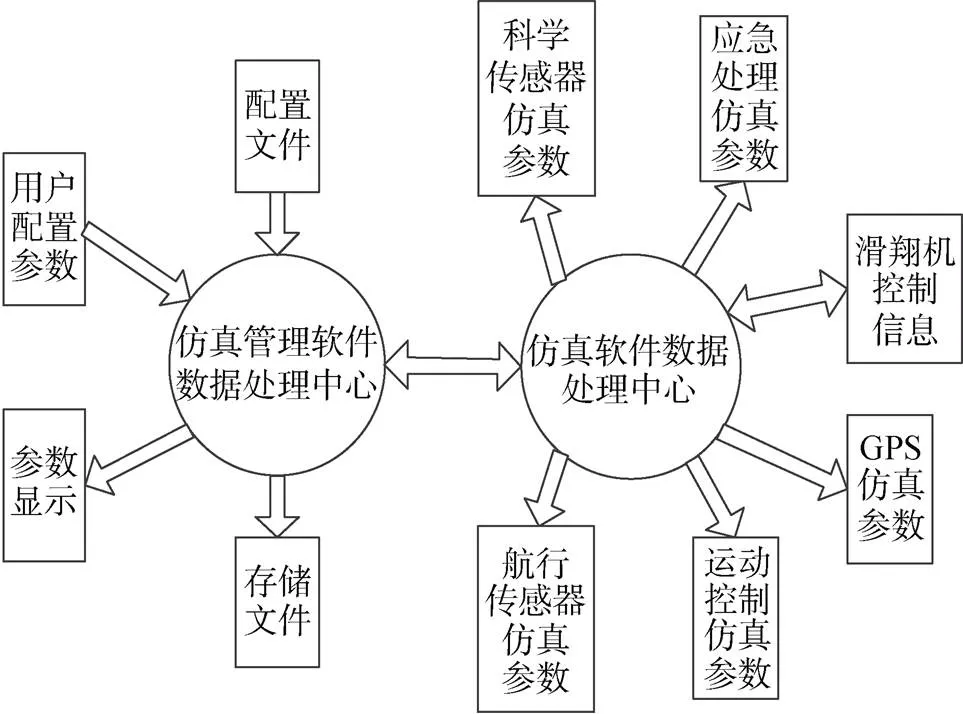
图4 仿真系统管理软件与仿真系统软件数据流程图

图5 仿真系统管理软件
3.3 数据接收处理软件设计
水下滑翔机的数据接收处理软件同样采用Visual Studio 2010开发, 它主要负责将水下滑翔机上传的环境传感器数据(如温度、盐度和深度)、运动姿态数据和GPS数据等进行解析、显示和存储。同时, 还可以向水下滑翔机下达任务规划命令, 规划水下滑翔机的下潜深度、俯仰角度及航向等, 具体的数据接收处理软件流程如图6所示。
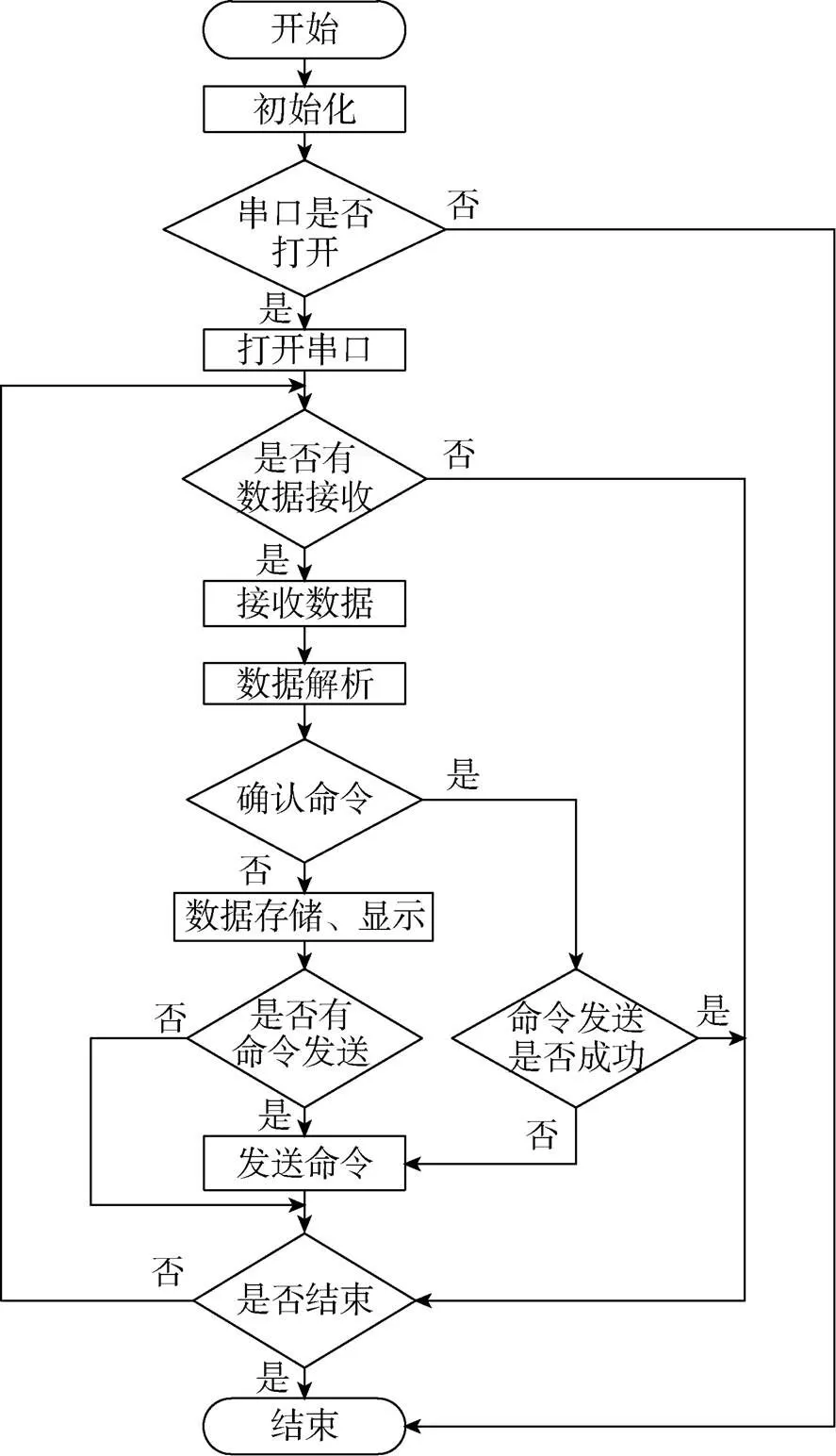
图6 数据接收处理软件流程
开发数据接收处理软件时, 首先创建一个对话框的工程, 然后使用Visual Studio 2010提供的各类控件来设计程序的界面, 其中串口通信使用MSComm控件来实现, 使用该控件非常高效、方便, 只需简单的配置即可实现串口通信[9]。
如图7所示, 数据接收处理软件采用图形化界面设计, 便于用户对水下滑翔机运动状况进行观察与分析。

图7 数据接收处理软件
通过自定义绘图类实现水下滑翔机深度数据曲线、俯仰角度数据曲线和航向角数据曲线的绘制。数据接收处理软件还会将数据存储到以任务号(水下滑翔机每执行一次任务会有唯一1个任务号)命名的.txt文本文件中。这样方便用户使用更专业的软件对数据进行进一步的分析和处理。
4 系统测试
水下滑翔机在进行湖试或海试前, 通常需要先在岸上进行虚拟周期测试。为此在水下滑翔机半实物仿真系统进行测试前, 首先进行主控系统的虚拟周期测试, 然后进行数据接收处理软件和仿真系统管理软件等的测试, 最后在确保各子系统没有问题的情况下再进行水下滑翔机半实物仿真系统的系统测试。
水下滑翔机半实物仿真系统测试所使用的水下环境和水下滑翔机状态等参数的配置文件, 根据“海鸥”号水下滑翔机在千岛湖某测试基地测试时的实测数据生成[10]。
水下滑翔机进行转向仿真测试时, 当未达到设定的航向时, 可记录到控制重块旋转电机仿真信号量的持续输出; 而当达到设定航向时, 控制重块旋转电机的仿真信号量停止输出, 如图8所示。

图8 水下滑翔机转向仿真测试
至于水下滑翔机的浮力驱动、姿态调节设定参数与运动速度、俯仰角等运动参数的关系, 通常在前期由水下滑翔机的动力学建模、水动力仿真等确定。在水下滑翔机的试验中, 也可以通过控制系统测量一段时间内水下滑翔机的深度变化(与浮力驱动相关), 得到水下滑翔机的垂直速度分量, 进而估算出其水平速度(不考虑海流), 间接得到水下滑翔机浮力驱动与运动速度的关系; 此外, 试验时设定俯仰角可以应用比例-积分-微分(proportion-integral-derivative, PID)算法(通常只采用P)得到与姿态调节参数的关系。经过对水下滑翔机“锯齿形”运动进行多个周期的测试, 测试结果显示水下滑翔机半实物仿真系统可以较好地满足设计要求。
针对水下滑翔机的下潜超深、载体漏水、电池欠电等主要故障进行了全面仿真测试, 水下滑翔机半实物仿真系统能很好地满足仿真要求。图9为进行载体漏水故障仿真测试。
长时间测试表明, 该水下滑翔机半实物仿真系统整体性能稳定, 实现了文中所设计的功能, 可以满足水下滑翔机半实物仿真的要求。
5 结束语
文中设计了一种水下滑翔机的半实物仿真系统。通过主控系统采集处理水下滑翔机水下环境以及运动状态等信息, 并上传到数据接收处理软件, 仿真水下滑翔机与岸站的通信过程, 可以实现水下滑翔机控制系统、通信系统的仿真测试。使用该系统可以高效率地进行水下滑翔机控制系统、传感器系统和通信系统等的研发测试。有效降低水下滑翔机的研发成本, 使更多科研人员和学生有机会进行水下滑翔机的研究, 具有教育及教学意义。同时, 该系统整体性能稳定, 升级与维护方便, 可以较好地满足设计要求, 具有理想的应用前景。
下一步工作还需考虑水下滑翔机多种通信方式及其之间的切换, 并进一步开展水下滑翔机仿真数据分析软件的开发。
[1] 俞建成, 刘世杰, 金文明, 等. 深海滑翔机技术与应用现状[J]. 工程研究-跨学科视野中的工程, 2016, 8(2): 208-216.Yu Jian-cheng, Liu Shi-jie, Jin Wen-ming, et al. The Pres- ent State of Deep-sea Underwater Glider Technologies and Applications[J]. Journal of Engineering Studies, 2016, 8(2): 208-216.
[2] Eriksen C C, Osse T J, Light R D, et al. Seaglider: A Long-range Autonomous Underwater Vehicle for Oceanographic Research[J]. IEEE Journal of Oceanic Engine- ering, 2001, 26(4): 424-436.
[3] Nakamura M, Asakawa K, Hyakudome T, et al. Hydrod- ynamic Coefficients and Motion Simulations of Under- water Glider for Virtual Mooring[J]. IEEE Journal of Oce- anic Engineering, 2013, 38(3): 581-597.
[4] Wang S X, Sun X J, Wang Y H, et al. Dynamic Modeling and Motion Simulation for A Winged Hybrid-Driven Underwater Glider[J]. China Ocean Engineering, 2011, 25(1): 97-112.
[5] Cao J J, Cao J L, Zeng Z, et al. Seagull——Designed for Oceanographic Research[C]//Oceans 2016. Shanghai: IEEE, 2016: 1-7.
[6] 张禹, 刘开周, 邢志伟, 等. 自治水下机器人实时仿真系统开发研究[J]. 计算机仿真, 2004, 21(4): 155-158.Zhang Yu, Liu Kai-zhou, Xing Zhi-wei, et al. Research on Real-time Simulation System of Autonomous Underwater Vehicle[J]. Journal of Computer simulation, 2004, 21(4): 155-158.
[7] 赵加敏, 秦再白, 庞永杰, 等. 一种水下机器人集成仿真系统的设计[J]. 计算机仿真, 2005, 22(10): 172-175.Zhao Jia-min, Qing Zai-bai, Pang Yong-jie, et al. Design of an Integrated Simulation System for AUV[J]. Journal of Computer simulation, 2005, 22(10): 172-175.
[8] 甘永, 毛宇峰, 万磊, 等. 水下机器人半实物运动仿真系统的设计[J]. 系统仿真学报, 2006, 18(7): 2026-2029.Gan Yong, Mao Yu-feng, Wan Lei, et al. Design of Semi- Physical Motion Simulation System of Underwater Vehicle[J]. Journal of System Simulation, 2006, 18(7): 2026- 2029.
[9] 唐原广, 王志光. 船舶运动姿态测量系统设计与实现[J]. 舰船科学技术, 2017, 39(13): 108-111.Tang Yuan-guang, Wang Zhi-guang. Design and Realization of Motion Attitude Measurement System for Ships[J]. Journal of Ship Science and Technology, 2017, 39(13): 108-111.
[10] 曹俊亮. 水下滑翔机多模态运动控制与路径规划研究[D]. 上海: 上海交通大学, 2016.
Design and Realization of Hardware-in-the-loop Simulation System of Underwater Glider
PAN Hao-dong, WANG Zhi-guang, LIU Chun-hu, LIAN Lian
(The State Key Laboratory of Ocean Engineering, Shanghai Jiaotong University, Shanghai 200240, China)
In order to improve the research and development efficiency of the underwater glider and reduce the cost of research and development, a hardware-in-the-loop simulation system for the underwater glider is designed. The system simulates the underwater environment and the motion states of the underwater glider during the motion and sends the information to the main control system of the glider. The main control system outputs the corresponding control information, and then collects the information through the simulation system. After processing, it is sent to the simulation system management software for storage which is convenient for users to analyze and process. Finally, the main control system uploads the data to the data receiving and processing software through the RS232 serial port to simulate the communication process between the underwater glider and the shore station. Through the proposed system, the research of the underwater glider control system and communication system can be efficiently performed, and the research and development costs of the underwater glider can be reduced.
underwater glider; hardware-in-the-loop simulation; data receiving and processing; main control system
TP242; TP391.9
A
2096-3920(2020)04-0440-06
10.11993/j.issn.2096-3920.2020.04.013
2019-09-17;
2019-12-27.
国家高技术发展研究计划(863计划)(2015AA09A112).
潘昊东(1990-), 男,硕士,主要研究领域为潜水器运动控制与仿真.
潘昊东, 王志光, 刘纯虎, 等. 水下滑翔机半实物仿真系统设计与实现[J]. 水下无人系统学报, 2020, 28(4): 440-445.
(责任编辑: 杨力军)
