一种移动感知的混合FSO/RF 下行链路方案*
2022-09-16朱志伟
朱志伟
(长沙民政职业技术学院电子信息工程学院,长沙 410004)
0 引言
将无人机(unmanned aerial vehicle,UAV)作为移动基站(movable base stations,MBS)可有效增强对地面用户的覆盖,其已在灾难救援、紧急通信场景中广泛使用。
尽管利用UAV 作为MBS 存在较多优势,但其仍存在一些技术挑战,如路径规划、干扰管理、能量效率以及建立与地面基站的稳定下行链路。UAV 的移动对下行链路性能有重要影响,设计稳定的下行链路是UAV-MBS 网络的关键。
目前,针对UAV-MBS 网络的下行链路有射频(radio frequency,RF)和自由空间光(free space optical,FSO)两种传输方式。然而,为了减少大气环境对面FSO 通信系统性能的影响,并提高无线光通信系统的可靠性和可用性,将FSO 链路和毫米波射频链路相结合,形成混合FSO/RF 通信系统受到广泛关注。
目前多数研究工作只是针对固定蜂窝网络讨论了混合FSO/RF 通信系统,只有部分研究工作关注了基于混合FSO/RF 的UAV-MBS 网络下行链路。例如,文献[7]面向UAV-MBS 网络,讨论了混合FSO/RF 链路的吞吐量。该系统利用UAV 作为转发节点。源节点至转发节点间采用FSO 链路;转发节点至目的节点采用RF 链路。该系统通过优化UAV的轨迹最大化系统吞吐量。然而,该系统是两条不同链路分别采用了FSO 链路和RF 链路,并不是真正意义上的混合FSO/RF 链路。此外,文献[8]讨论了混合FSO/RF 链路的资源分配问题。
然而,上述研究工作并没有关注了MBS 的移动。为此,本文针对UAV-MBS 网络,提出移动感知的混合FSO/RF 下行链路方案(MAHB)。MAHB 方案先推导了MBS 处于移动和停止状态的概率;再考虑3 个场景:1)只采用RF 链路(RF-Only);2)只采用FSO 链路(FSO-Only);3)混合RF/FSO 链路(Hybrid)。并结合移动模型,推导这3 个场景下的误码率。仿真结果表明,相比于RF-Only 和FSO-Only,Hybrid 链路提升了BER 性能。
1 系统模型
考虑由一个中心基站(base station,BS)覆盖的蜂窝区域网络,其为该区域内的多个用户服务。为了提高对用户服务的质量,额外部署由无人机扮演一个移动式基站(MBS)。通过MBS 提高网络的总体性能。此外,MBS 配备RF 天线和单束激光。RF 传输天线用于接收/发射RF 信号;单束激光用于接收光信号。
UAV 采用系留无人机是多旋翼无人机的一种特殊形式,其通过系留线缆传输的地面电源作为动力来源,代替传统的锂电池。因此,相比于其他类型的无人机,系留无人机的续航时间长。

2 RF 和FSO 链路模型
MAHB 方案引用混合的FSO/RF 链路。当MBS停止时,就采用FSO。若MBS 是移动的,就启用RF链路。
2.1 FSO 链路
FSO 链路采用开/关键控调制数据。因此,光检测器端所接收的信号为:

式中,x表示已调信号;p表示传输的光功率;g表示FSO 链路的平均增益因子;η 表示光-电转换效率;w 表示加性高斯噪声,其均值为零、方差为σ;I表示湍流强度衰减因子:

式中,I表示归一化光照强度;I表示误差率。
依据文献[10],用式(10)计算I 的概率密度函数(probability density function,PDF):
式中,D 表示接收端的口径的半径;θ 表示传输波束的散度;α表示与天气相关的参数;L 表示传输距离。
2.2 RF 链路
RF 链路采用二值相移键控调制(binary phase shift keying,BPSK)。接收天线所接收的信号为:

式中,x表示已调信号;p表示传输信号功率;g表示路径损耗;z 表示高斯白噪声,且均值为零、方差为σ;h 表示信道衰落系数。信道服从Nakagami 衰落模型。h 的PDF 为:

式中,m 表示Nakagami 参数。
RF 链路引用mmWave 波段,其带宽为g。在波段上产生的平均路径衰耗,单位为:


3 下行链路的误码率
本节讨论了基于RF 下行链路、基于FSO 链路和混合RF/FSO 链路的误码率。
在MBS 停止阶段的误码率:
类似地,MBS 在飞行阶段的误码率为:
3.1 RF 下行链路的BER

3.2 FSO 下行链路的BER


3.3 混合RF/FSO 链路的BER
混合RF/FSO 链路的原则:当MBS 是静止的时,就启用FSO 链路;当MBS 是飞行状态,就启用RF 链路。因此,混合RF/FSO 链路的BER 就是基于RF 链路和FSO 链路的BER 融合。即在飞行阶段,启用RF 链路。在静止阶段,启用FSO 链路。

4 性能仿真
4.1 仿真环境
考虑如图1 所示的仿真场景,蜂窝半径为L。在该蜂窝边沿上部署N 个位置点。每个位置间的距离固定。每个MBS 从一个位置点移动至另一个位置点,或者呆在同一个位置的概率均为1/N。

图1 仿真场景
RF/FSO 链路的仿真参数如表1 所示。
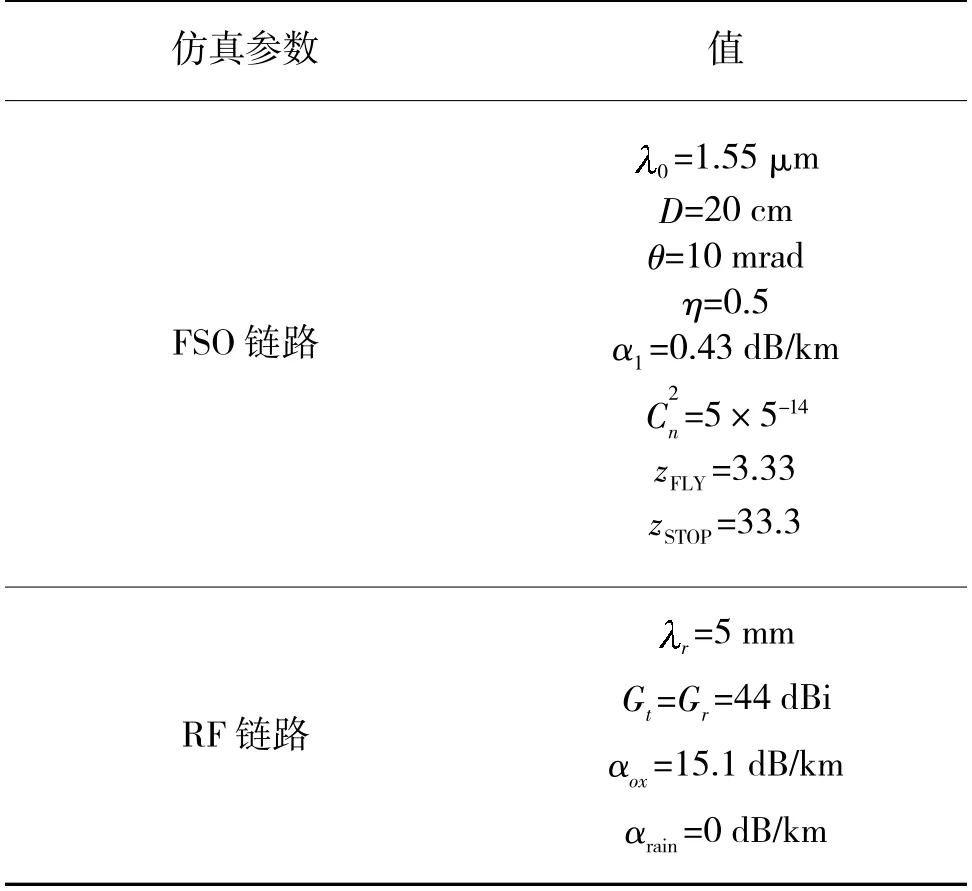
表1 仿真参数
4.2 误码率性能
为了更好地分析混合RF/FSO 链路的性能优势,选择仅用RF 链路和仅用FSO 链路作为参照,并同步分析它们的BER 性能。在以下仿真图中,用“Hybrid”表示混合RF/FSO 链路场景;用“RF-Only”表示仅FSO 链路场景;用“FSO-Only”表示仅FSO链路场景。此外,“RF-Only”。
从图2 可知,相比于RF 链路和FSO 链路,混合RF/FSO 链路的BER 得到有效降低。例如,当BER为10时,混合RF/FSO 链路的所需功率相比于RF链路和FSO 链路分别下降了仅3 dB 和13 dB。此外,图2 还给出了理论的BER 分析曲线。从图可知,理论曲线与仿真曲线走势相近,说明文中推导的BER 公式是正确的。

图2 BER 随Pt 的变化情况(L=1km,N=4)
从图3 可知,相比于RF-Only 和FSO-Only,混合RF/FSO 链路有效地控制了BER,提高了功率增益。例如,当BER=10,混合RF/FSO 链路下的所需功率比RF-Only 和FSO-Only 分别下降了近37 dB 和2 dB。此外,对比图2(L=1 km,N=4)和图4(L=2 km,N=6)曲线不难发现,图3 增加了误码率。这说明,蜂窝区域的扩大不利于降低误码率。
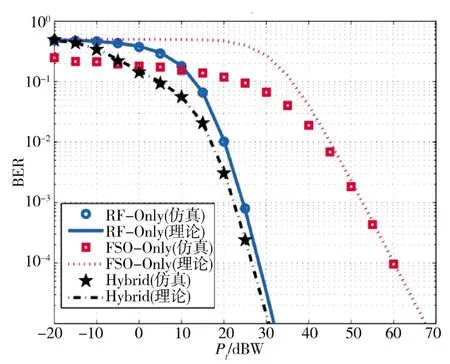
图3 BER 随Pt 的变化情况(L=2km,N=6)

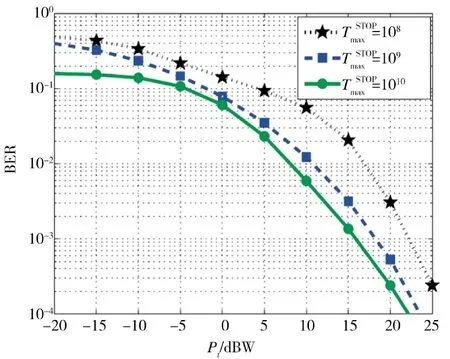
图4 混合RF/FSO 链路的BER
5 结论
针对UAV-MBS 的蜂窝网络,提出一个混合下行链路方案MAHB。MAHB 方案充分考虑了MBS 的移动性。在混合的RF/FSO 链路阶段,当MBS 静止在某固定位置时,就选择FSO 链路;当MBS 从一个位置移动至另一个位置时就切换至RF 链路。
仿真结果表明,相比于RF-Only 和FSO-Only链路,混合RF/FSO 链路降低了链路的误码率。例如,当BER=10,L=1 km 时,相比于RF-Only 和FSO-Only 链路,混合RF/FSO 下行链路所需的功率有效地降低。此外,本文只考虑了单UAV 场景,后期将考虑多个UAV 的协作场景,这将是下一步的研究工作。
