PMSM伺服系统位置环的PI-模糊混合控制器研究
2020-08-01范蟠果
王 嘉,范蟠果
(西北工业大学 自动化学院,西安 710072)
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)因具有高效率、高精度、高转矩密度、宽调速范围以及转矩脉动小等多种优点,广泛应用于交流伺服系统中[1],目前PMSM位置伺服系统位置环大多采用PI控制方法,但由于其采用固定的PI参数,对电机参数、转速和负载变化敏感[2],难以兼顾稳态精度和动态性能[3],而现代工业应用场合中,对伺服系统的动态响应和控制精度均提出了很高的要求。针对提高交流伺服系统鲁棒性的问题,许多学者进行了大量研究,目前应用较多的算法有神经网络算法、滑膜控制算法、模糊控制算法。
文献[2]将滑膜变结构控制器引入PMSM直接转矩控制(Direct Torque Control,DTC)中,将传统DTU中的2个滞环控制器替换为滑膜控制器,改善系统动态性能的同时具有良好的鲁棒性。文献[4]提出了采用神经网络实时整定PI控制器参数的方法,将其应用于PMSM伺服系统位置环,实现了无稳态静差的前提下对位置给定信号的快速跟踪[4]。模糊控制算法作为一种智能算法,模仿人类判断时的模糊概念,有很强的鲁棒性,但受限于模糊规则的数目,无法直接应用于高精度控制场合,常需要与其他算法配合使用,目前常用的模糊控制方法有模糊PI控制、自适应模糊控制、神经模糊控制等[5]。文献[6]将模糊PI控制引入PMSM伺服系统位置环,使用模糊算法对PI控制器的比例和积分参数进行实时调整,有效减少超调的同时抑制了振荡。但该模糊PI控制器本质上仍是PI控制器,只有PI控制一种控制模态,由于PI控制器的参数直接决定了控制性能,因此对模糊控制器的设计精度要求较高,未能充分发挥模糊算法的鲁棒性;并且该模糊控制器需要分别为比例系数和积分系数设计模糊规则,实现复杂度也较高。
本文将PI算法和模糊算法两种控制算法结合,设计了一种拥有三种控制模态的PI-模糊混合控制器,相较于文献[6]中的PI模糊控制器,本文提出的混合控制器使模糊算法和PI算法均直接参与控制过程,且仅需设计一套模糊规则,充分发挥模糊算法鲁棒性的同时降低了实现难度。将其应用于PMSM伺服系统的位置环,通过反馈误差判断调节过程,在调节初期使用模糊控制策略以快速响应给定信号,中期两种算法共同作用以做过渡,接近稳定时只使用PI控制保证稳态精度和避免超调。仿真结果表明:较使用PI控制器而言,该混合控制器在保证位置伺服系统稳态性能的前提下明显改善了系统的动态性能,充分发挥了模糊控制器的鲁棒性,避免了控制精度不足的问题。
1 PMSM数学模型
文中为了建模分析方便,忽略PMSM铁心的磁路饱和、磁滞损耗、涡流[7]等影响,PMSM在d-q坐标系下的电压方程为
(1)
磁链方程为
(2)
转矩方程和运动方程[3]为
(3)
Te=Jpnωr+Bωr+TL
(4)
式中,ud,uq为d轴和q轴的定子电压;id,iq为d轴和q轴的定子电流;Rs为定子电阻,Ψd,Ψq为d轴和q轴的定子磁链;Ψf为转子磁链,ωr为转子角速度;Ld,Lq为d轴和q轴电感;Te,TL为电磁转矩和负载转矩,pn为磁极对数;J和B分别为电机转动惯量和摩擦及阻尼系数。
PMSM三闭环位置伺服系统结构如图1所示。其中位置环控制器作为伺服系统最外环,作用是快 速响应给定的位置信号,决定着系统位置稳态误差精度及响应速度;位置环控制器通常采用PI算法,大多数情况下为了避免产生超调,采用纯比例控制[8](比例控制可看成积分系数为零的PI控制)。而PI算法由于其固有缺陷,越发难以满足现代工业控制的需要,对此,本文将PI控制与模糊算法相结合设计了一种三模态混合控制器应用于位置环,在避免超调的前提下大幅缩短了系统跟踪位置给定的调节时间。
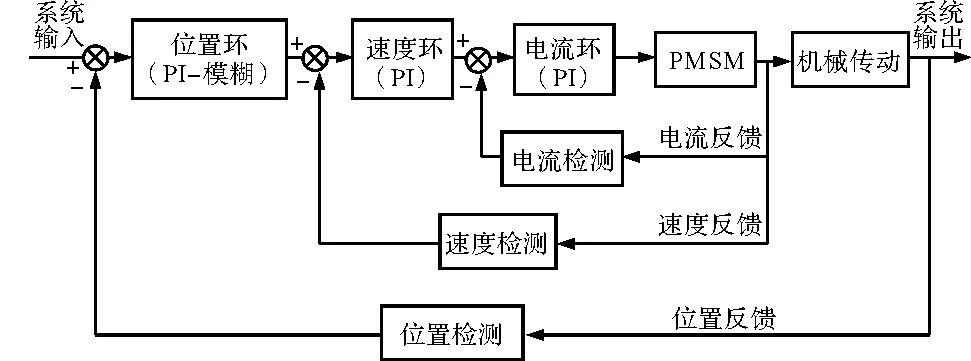
图1 PMSM位置伺服系统控制原理图
2 PI-模糊混合控制器
模糊控制是一种智能控制策略,从逻辑思维和经验常识角度出发挖掘控制规律。与传统控制算法相比,模糊控制无需对被控对象进行精确数学建模,且受被控对象参数变化的影响较小,因而非常适用于解决交流伺服系统中非线性、时变、耦合等因素的影响[9]。
引言中提到的PI-模糊混合控制器结构如图2所示。由图可见,该控制器包含了模糊控制和PI控制两种不同的控制策略,因此该控制器有多种控制模态,操作模式选择器负责对控制器输入进行判断,以选择合适的控制策略。

图2 PI-模糊混合控制器原理图
该混合控制器的输入信号为位置误差量e(k),实际上,控制器模态的切换由误差量e(k)及其变化率Δe(k)共同决定,具体规则如:
(1)e(k)∈ZeandΔe(k)∈Zde
⟹S1=OFF,S2=ON
(2)e(k)∉Zeand Δe(k)∈Zde
⟹S1=ON,S2=ON
(3)e(k)∉Zeand Δe(k)∉Zde
⟹S1=ON,S2=OFF
(5)
式中,Ze和Zde分别是对位置误差e(k)及其变化率Δe(k)所规定的零模糊子集。
在刚收到控制信号时,e(k)值发生突变,Δe(k)非常大,此时只闭合开关S1,激活模糊算法以求快速响应输入量的变化;当e(k)已趋于稳定且值较小时断开S1闭合S2,此时仅有PI算法起作用,以保证稳态精度;在这两种控制状态切换的过渡期间两个控制器共同起作用,通过调整Ze和Zde的范围即可控制该混合控制器三种模态的切换时机,从而达到调节控制效果的目的。
由于有两种不同的控制算法在该混合控制器中协同发挥作用,控制器模态的切换需要重点考虑,为了避免两个控制算法的抖振问题,控制器从积分操作模式(有PI算法参与)转换到非积分操作模式(单独模糊算法)应遵循以下原则:前一模式的控制器输出值作为当前模式下控制器输出的初始值[10]。
模糊控制器采用工业上应用普遍的Takagi-Sugeno结构,以e(k)、Δe(k)作为输入量,输出离散的模糊单点。分别在其两个输入论域空间上定义NL、NM、NS、Z、PS、PM和PL 共7个模糊语言子集,出于降低控制器对参数变化灵敏度的考虑,在此对输入变量e(k)、Δe(k)标准子集采用梯形隶属函数[11],如图3所示(模糊语言子集经控制器最大输入值标准化)。

图3 模糊控制器隶属函数
此Takagi-Sugeno模糊控制器的输出论域由15个离散的模糊单点组成。对应的输入论域隶属函数是对称分布的,但并非完全线性化,因为在零点附近额外增加一个子集能保证控制器操作模式平滑切换[7]。由隶属函数可知,最多同时有两条相邻的模糊规则对输出有影响,为了简化设计过程,两个相邻的模糊集合的交点取μ=0.5,因而控制器输出值具有良好的插值特性。使用重心法(Center of Gravity,COG)解模糊并经适当调整后得到输出论域模糊单点的值为:-1、-0.667、-0.5、-0.333、-0.167、-0.0083、-0.0042、0、0.0042、0.0083、0.167、0.333、0.5、0.667和1(经控制器的最大输出值标准化)。模糊控制器的规则表如表1所示。

表1 模糊控制器规则表
模糊控制器的输入输出关系如图4所示(u表示控制器量化后的输出),由图可知,输入输出曲面较平滑,说明该模糊控制器的设计是合理的,仿真实验也证明了其在响应快速性方面良好的效果。

图4 模糊控制器输入-输出关系图
3 Simulink仿真
如图5所示,使用Matlab中的Simulink平台搭建PMSM位置伺服系统仿真模型,其中电流控制采用id=0的矢量控制方法。主要的设定参数如下:

图5 Simulink仿真模块图
定子电阻Rs=2.875Ω,定子d相电感Ld=0.015H,q相电感Lq=0.015H,磁链Ψf=0.275Wb,电极对数pn=4,转动惯量J=0.266kg·m2,阻尼系数B=0.008N·m·s,负载转矩为TL=5N。
图6~图9分别给出了大、小位置给定的速度和位置响应特性曲线(大位置给定角度为10rad,小位置给定角度为0.5rad;0s时加上负载,0.5s时给定位置信号)。

图6 10rad位置信号给定下系统的位置响应特性

图7 10rad位置信号给定下系统的转速响应特性

图8 0.5rad位置信号给定下系统的位置响应特性
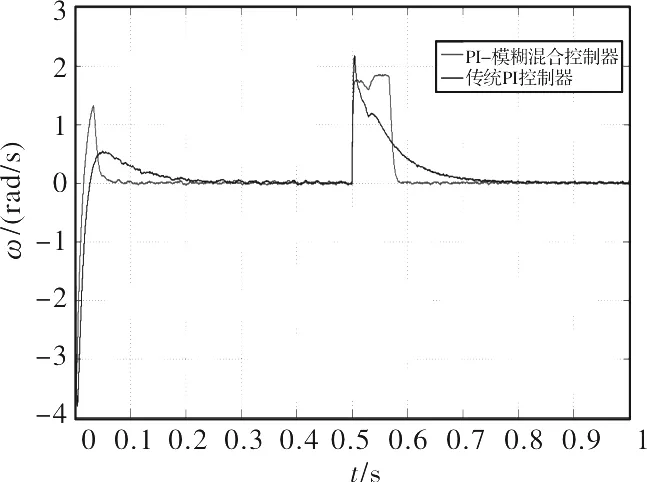
图9 0.5rad位置信号给定下系统的转速响应特性
仿真结果表明,采用PI-模糊混合控制器的PMSM位置伺服系统,在给定不同位置信号时,均可在无超调的情况下实现快速跟踪[12],相较于传统的单一PI控制,在拥有同样高稳态精度的基础上调节时间明显缩短。
4 结 论
包含有模糊控制算法与线性PI算法两种控制算法的混合控制器,具有PI控制器高稳态精度的同时,也具有模糊控制器的良好鲁棒性和快速性[13]。仿真结果表明,将这种控制器应用于PMSM伺服系统位置环效果显著,特别适用于对位置响应快速性提出严格要求的交流伺服系统。
