电流源驱动异步电机矢量控制方法研究
2021-04-15许宇豪肖海峰宁大龙乔社娟
许宇豪,肖海峰,宁大龙,乔社娟
(西安航空学院 电子工程学院,西安 710077)
0 引言
异步电动机具有坚固耐用、成本低廉,启动力矩大等优点,广泛应用在轨道交通、航空航天、石油化工等领域[1]。矢量控制是由德国科学家F.Blaschke提出的一种控制交流电机的方法,利用坐标变换和磁场定向可将异步电机等效为一台同步旋转的直流电机,解决了异步电动机控制中存在的模型非线性、多变量、强耦合的问题[2]。矢量控制一般指按转子磁链定向的矢量控制。它的优点是能实现磁链和转矩的彻底解耦,因此控制简单,便于系统设计。但是,控制转子磁链所需的转子电阻和电感参数易受温度和湿度的影响而发生变化,转子参数的改变会导致磁链估算产生误差,使原本解耦的系统又重新耦合起来,尤其在低速的情况下,该问题更加突出[3]。
为了克服转子参数变化给异步电机调速性能带来的影响,国内外学者们主要从两个方面提出了解决方法:一是通过估计转子参数,补偿转子参数变化对磁链的影响,常用的方法有:最小二乘法、模型参考自适应法、扩展卡尔曼滤波法等[4];二是避开敏感的转子参数,采用定子磁链定向或气隙磁链定向的矢量控制[5]。
在矢量控制中,磁链矢量可以选择转子、定子或气隙磁链进行控制;控制磁链和转矩可以采用逆变器的输出电压或电流。因此,按磁链定向的矢量控制技术共有六种控制方案。按定子磁链、气隙磁链定向的矢量控制是一种优于按转子磁链定向的矢量控制方法,主要表现在定子和气隙磁链的计算中不含敏感参数,保证磁场定向具有较高准确度。同时它们也具有各自的优势,按定子磁链定向时系统鲁棒性强;按气隙磁链定向时适合处理磁场饱和问题。
考虑到目前的研究主要将输出电压作为控制量,缺乏对电流的直接控制[6-7]等相关研究。因此,本文采用了输出电流控制磁链和转矩,研究了电流控制型按定子磁链和气隙磁链定向的矢量控制。首先,通过将磁链矢量定向在定子和气隙坐标系的d轴,推导出控制方程;然后,分析两种控制方案的参数敏感性和磁场定向的准确性,讨论了它们的性能差异和特点;最后,通过仿真验证了采用电流控制型定子和气隙磁链定向可以有效降低矢量控制对转子参数的依赖,提高了系统的鲁棒性。
1 按定子和气隙磁链定向的控制方程
采用电流输出控制型逆变器,异步电机的磁链和电磁转矩受控于输出电流。本节首先推导出按定子和气隙磁链定向时定子电流d轴分量isd与磁链的传递函数,以及定子电流q轴分量isq与电磁转矩Te之间的传递函数;然后,建立解耦控制方程,推导磁链和转矩的传递函数;最后,分析了两种磁场定向下参数敏感性。
1.1 异步电机在同步旋转坐标系下的数学模型
同步旋转d-q坐标系上的异步电机定子和转子磁链方程可以表示为:
ψsd=Lsisd+Lmird
ψsq=Lsisq+Lmirq
ψrd=Lrird+Lmisd
ψrq=Lrirq+Lmisq
(1)
同步旋转d-q坐标系上的定子和转子电压方程为:
usd=Rsisd+pψsd-ω1ψsq
usq=Rsisq+pψsq+ω1ψsd
urd=Rrird+pψrd-(ω1-ω)ψrq
urq=Rsirq+pψrq+(ω1-ω)ψrd
(2)
异步电机的状态方程式为:
电磁转矩表达式为:
Te=npLm(isqrrd-isdirq) (4)
其中:d和q表示同步旋转坐标的d轴和q轴;u、i、R、L、ψ分别表示电压、电流、电阻、电感、磁链;ω1、ω、ωs分别表示同步转速、转速、转差角频率;p是微分算子;np是极对数;下标r、s、m分别表示转子、定子、气隙。
1.2 按定子磁链定向
按定子磁链定向的矢量控制是将定子总磁链定向在同步旋转坐标系的d轴,而q轴无磁链分量。因此,取d轴沿着定子总磁链矢量ψsd的方向,q轴逆时针旋转90°,则有:
将式(5)带入式(1)的第一、二式,得到转子电流的d-q轴分量:
将式(5)和式(6)代入式(4),得到定子电流q轴分量isq与电磁转矩Te之间的关系式:
Te=npψsdisq(7)
由式(2)的第一个方程和式(6)联立求解出定子电压d轴分量:
usd=Rsisd+pψsd(8)
将式(8)带入到式(3)的第一式,得到定子电流d轴分量isd与磁链ψsd的关系式
联立式(7)和式(9)可得到控制方程
在式(10)中利用定子电流q轴分量isq直接控制转矩Te,但定子电流d轴分量isd控制磁链ψs受到isq的影响。这种电流控制的相互影响称之为耦合作用。为了独立线性地用isd控制ψs,定义去耦项:
式(11)中的去耦项isdc是与定子电流q轴分量isq相关的一个电流,它受到电机漏磁系数σ、转子电磁时间常数Tr、转差角频率ωs的影响。虽然isdc会使电磁转矩电流影响励磁电流,但是isdc可以附加在输出电流上,与电机中的真实耦合项抵消,从而实现解耦控制。由式(10)得到按定子磁链定向时去耦以后的线性传递函数:
将式(2)的前两个方程变换到静止坐标系上,得到磁链和转矩检测计算公式
有些地方对森林防火的重要性、特殊性、艰巨性和长期性没有给予高度的重视,责任意识不强。由于人们不按规定进行野外用火,森林防火意识淡薄,火源管理难度增大。
1.3 按气隙磁链定向
按气隙磁链定向的矢量控制是将定子总磁链定向在同步旋转坐标系的d轴,而q轴无磁链分量。因此,取d轴沿着气隙总磁链矢量ψmd的方向,q轴逆时针旋转90°,则有:
将式(14)带入式(1)的第一、二式,得到转子电流的d-q轴分量:
将式(14)和式(15)代入式(4)得到定子电流q轴分量isq与电磁转矩Te之间的关系式:
Te=npψmdisq(16)
将式(15)和式(1)代入式(2),经过简化后得到:
由式(17)的第一式可解得定子电流d轴分量isd与磁链ψmd的关系式:
联立式(16)和式(18),得到
与按定子磁链定向类似,按气隙磁链定向时定子电流d轴分量isd控制磁链ψm受到了isq的影响。为了独立线性地用isd控制ψm,定义去耦项:
由式(19)得到按气隙磁链定向时,去耦以后的线性传递函数:
将式(15)和式(1)带入到式(2)中,再变换到静止坐标系上,得到磁链和转矩检测计算公式:
在电机参数准确的情况下,磁场的定向是准确的,磁链和转矩能实现较好的解耦控制。但异步电机在实际的工作中,转子电阻和转子电感会随着温度变化而变化,将不可避免的对调速性能造成影响。闭环控制系统中与电机参数相关的环节包括了前向通道的被控对象、反馈通道的磁场定向角、磁链和转矩,其中,磁场定向角用于计算d-q轴电流和电压值,影响磁场定向准确度。不同磁场定向下系统各环节与转子参数的关系如表1所示。按转子磁链定向的矢量控制各个环节均含有转子参数。转子参数的变化使得磁场定向不准确,观测得到的磁链和转矩偏离真实值,影响系统的动态和静态特性,包括转矩脉动增大,转矩稳态误差增大,系统调节时间增长等。
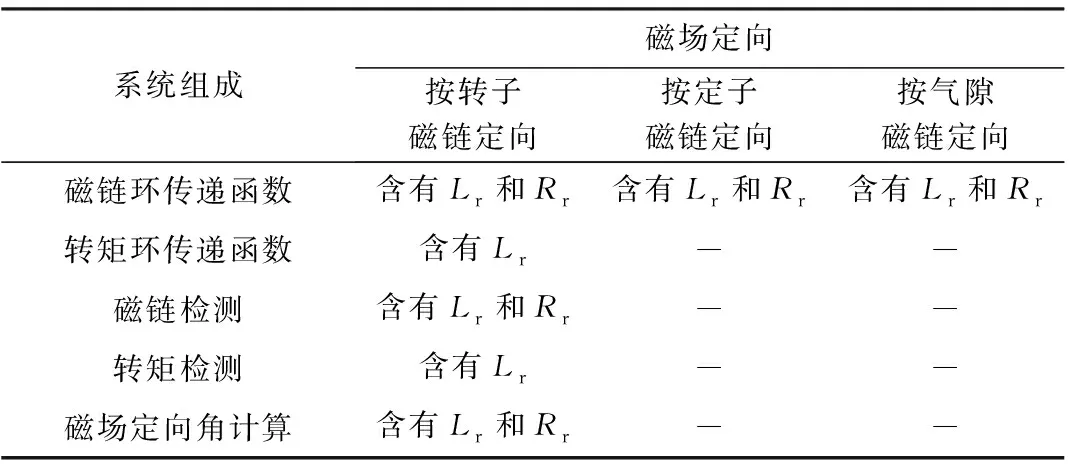
表1 不同磁场定向下系统各环节与转子参数的关系
按定子和气隙磁链定向的矢量控制仅磁链环被控对象传递函数含有转子参数,转矩环被控对象传递函数和反馈通道中均不含转子参数,这就保证系统具有较高的检测精度。虽然处于前向通道中的磁链环被控对象传递函数含有转子参数,但只要处于反馈通道中的磁链和转矩检测能保证具有较高精度,就可以有效抑制转子参数变化对系统控制性能的影响,提高系统的鲁棒性。
2 系统仿真
在Matlab/Simulink中分别搭建按转子、定子和气隙磁链定向的矢量控制系统仿真平台。仿真中,异步电机的额定电压为220 V,额定电流为6.4 A,额定功率为1.5 kW,额定频率为50 Hz,磁极对数为2,额定转速为1500 r/min;定子电阻Rs为1.72 Ω,转子电阻Rr为1.41 Ω,定转子互感Lm为0.109 H,转动惯量J=0.077 kg·m2。异步电机的控制系统包括电流环、磁链环、转矩环和转速环。它们的设计遵循两个基本原则:设计顺序上先内环后外环;系统的带宽从内环到外环逐步减小。
2.1 动态过程仿真研究
按三种磁链定向时的仿真结果如图1所示。仿真时异步电机先空载启动,待磁链稳定建立后,在0.2 s加入60 rad/s的给定转速,然后,当异步电机进入稳态后,在0.85 s给定一个10 N·m的负载转矩。可以看出,最终异步电机输出的电磁转矩稳定在10 N·m左右,平衡了负载转矩。从系统的动态调节过程中看出,转矩变化时磁链稳定在给定值不变,说明系统实现了磁链和转矩的解耦。由于在三种磁场定向的系统设计中,磁链环、转矩环、转速环的截止频率和系统型别设定相同,所以超调、响应速度等系统性能指标在三种磁场定向下表现的基本一致。仿真结果证明了电流控制型按定子和气隙磁链定向方案的可行性和正确性。

(a)按转子磁链定向仿真结果 (b) 按定子磁链定向仿真结果 (c) 按气隙磁链定向仿真结果
2.2 转子参数变化的仿真研究
为了研究在三种磁场定向下转子参数变化对系统造成的影响,将转子电阻Rr和转子电感Lr增大50%后再次进行仿真,三种磁场定向下稳态转矩脉动数据比较如表2所示,改变电机转子参数后按三种磁链定向时的仿真结果如图2所示。在图2(a)中,按转子磁链定向的矢量控制磁链和转矩反馈值无法达到给定值,存在静差以及转速波动。在图2(b)和图2(c)中,按定子和气隙磁链定向的矢量控制反馈检测量中均不含转子参数,保证较高的检测精度,能有效抑制转子参数变化对系统控制性能的影响,提高系统的鲁棒性。对比图1和图2,转子参数发生变化的前后,按定子和气隙磁链定向的矢量控制反馈都能很好的跟随指令,系统性能几乎不受影响,验证了此方法的优越性。从表2的对比可知转子参数发生变化后,按转子磁链定向的矢量控制脉动率达到了5.7%,而按定子和气隙磁链定向的矢量控制脉动率仅为0.77%和1.36%。
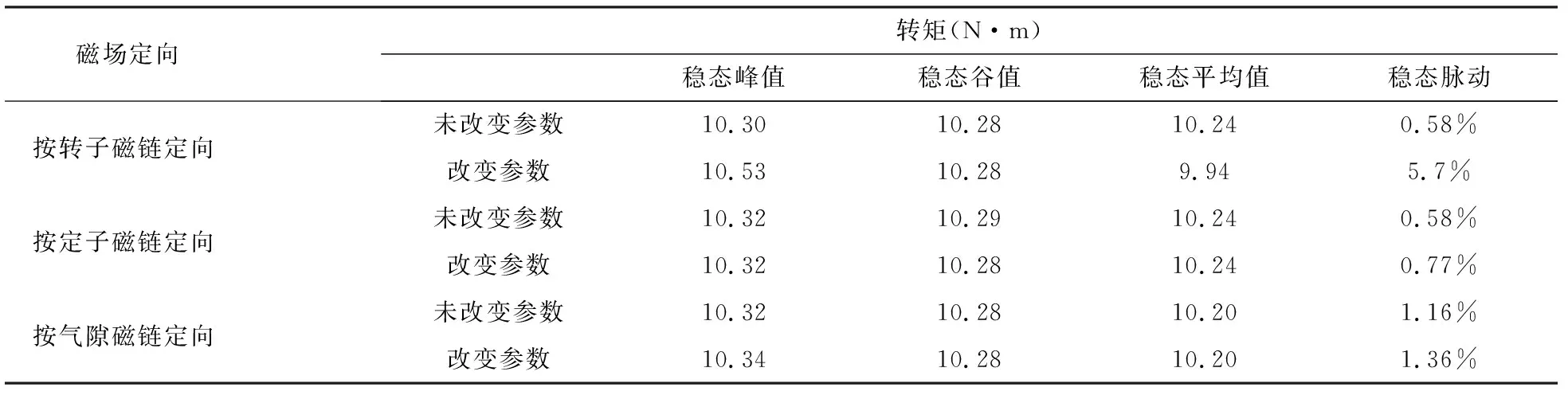
表2 三种磁场定向下稳态转矩脉动数据比较

(a) 按转子磁链定向仿真结果 (b) 按定子磁链定向仿真结果 (c) 按气隙磁链定向仿真结果
3 结论
本文使用电流输出控制型逆变器,分别对按转子、定子和气隙磁链定向时的矢量控制系统进行了理论推导、设计和仿真,比较三种磁场定向的矢量控制系统受转子参数影响的大小。得出以下结论:按定子和气隙磁链定向时,磁场定向角、磁链和转矩的计算不含转子参数,提高了磁场定向的准确度,保证磁链和转矩检测有较高的精度,闭环系统的鲁棒性强,解耦效果好;但是带来这个优点的同时,也引入了一个问题,即定子电流励磁分量控制磁链时,含有定子电流转矩分量这个去耦项,本文使用反馈去耦的方法重构去耦项,在定子电流磁链分量上附加去耦项,使之与电机内部耦合量相抵消,实现解耦控制,去耦以后的数学模型更加简单,便于系统设计和控制;研究结果表明异步电机调速系统采用定子电流控制定子和气隙磁链要比使用定子电流控制转子磁链具有更好的抗参数扰动的能力。因此,本文提出的定子电流控制方法充分地利用了异步电机按定子和气隙磁链定向矢量控制的强鲁棒性优势,同时解决了磁链和转矩耦合的问题。综上分析,按定子或气隙磁链定向的矢量控制比按转子磁链定向矢量控制在异步电机调速系统中具有更大的应用价值。
