基于神经网络模糊控制的单目无人机视觉避障方法研究
2020-07-01张晓军
张晓军
(广东工业大学华立学院,广东 广州 511325)
0 引言
单目无人机巡视现场多是复杂场景,对无人机巡查工作的要求更为苛刻。无人机在控制自身飞行的同时需完成在线检查测验及躲避障碍物,由于操作内容过多,导致无人机在规避电线塔杆和冗余线路时存在避障问题,为检查改修带来困难。针对单目无人机感应器的类型、属性、规避障碍物数据等特征,结合神经网络和模糊控制原理对单目无人机视觉避障方法进行优化和改善[1]。对航行轨迹重新设计规划,得到实际的飞行检验,通过进一步实验测试说明该技术对单目无人机规避塔杆障碍物具有明显优势。
1 单目无人机视觉避障方法
1.1 单目无人机巡检路径及障碍物检测
无人机规避障碍物的后台系统主要分为2部分,即规避子系统和路径分析子系统。在无人机机身上的是规避子系统,在无人机计算处理器里的是路径分析子系统。2个系统通过信息输送交换有用信息,实现信息部分连接。其中,规避子系统被划分为信息通讯模块和规避判定模块。规避系统有2个方面要求:识别障碍和规避途径的选择识别[2]。采用多感应器结合技术巡查障碍物,通过嵌入式后台操控方案规划,须将系统软件和硬件相融合。设计算法前检查系统硬件的计算能力能否支撑平台要求。并检查信息传送的匹配度,在路径传送过程中,进行二次编程和解电码时,需检查芯片单位时间内获得的峰值帧数。对系统硬件规划时,要考虑信息搜集正确与否、技术的运行顺序、摄像机镜头的类型选择、停留位置,以及信息流的传输和丢失所耗费的时间成本[3]。基于此,根据无人机内部智能芯片性能判定规避路径,通过对无人机自身性能选择合适的障碍物规避方案。稳定飞行路径无人机规避障碍物方法的关键是路径分析系统,路径分析系统依赖无人机远程操作端口在计算机后台作业的平稳性。具体无人机规避功能模块结构设置如图1所示。

图1 无人机规避功能模块
根据图1设计的模块,控制单目无人机视觉避障系统稳定的运行轨迹,判断轨迹运行属性及障碍点的所在位置。选择障碍点本质属性点的稳定程度,一定条件下影响了单目无人机视觉避障的稳定性和准确性,尤其是视觉避障的正确度[4]。为提高视觉避障准确度,选择SIFT(scale-invariant feature transform)算法作为优化路径避障方法,采集和分析路径特征。标记并选择无人机巡检路径,将无人机巡检路径上等待搜集的障碍物特征样本点和初始巡检路径的参考点进行对比。比较巡检路径上尺寸不同的28个节点,当被检查点不小于28个相邻节点时,即开始关于无人机航行路径障碍特征点的认定和判断,具体如图2所示。
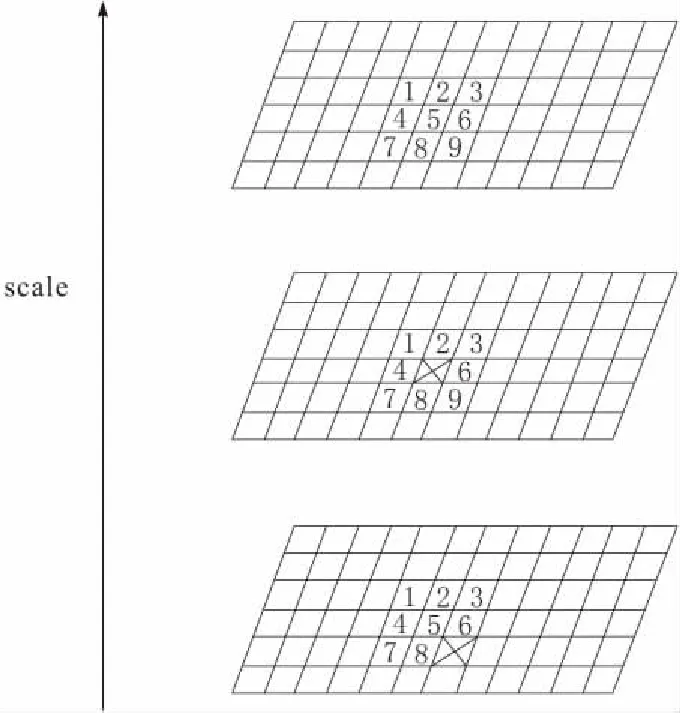
图2 无人机航行路径障碍特征识别原理
基于障碍特征识别原理,可有效对无人机巡检路线中存在的障碍物坐标点进行精准检测和定位。定位无人机航行路径障碍坐标点,并设计该障碍的合理规避方案,确定特征点的大致方向。利用SIFT算法,平均划分障碍物位置特征点及大致方向的周围区域,并对划分的72个防控图形进行有效规避路线的数据选择。统计72个防控图形的梯度以及路线选取的频率直方数值,选择效果最佳的路线方向作为规避路线。若规避路线的方向超过最大梯度80%,则记为规避辅助方向[5]。与此同时,利用SURF(speeded up robust features)算法,判断无人机巡检的规避角度。若其角度为大于60%的扇形角度,则易出现较大的路线偏移现象,需对峰值角度和路线方向进行二次选择[6]。如果目标避障的扇形角度在60%以内,则无人机的航行距离小于安全距离,就会因规避效果不佳而发生碰撞。因此,需要进一步对无人机巡检路径障碍规避方案进行合理选择。
1.2 无人机巡检路径障碍规避方案
依据单目无人机巡检路径的选择和障碍物检测的结果,进一步对无人机巡检路径障碍规避方案进行筛选。为了有效避免无人机的碰撞及路线偏移,对无人机巡检路线的避障目标点和安全避障距离进行设计和规范。通过控制目标距离,操控无人机飞行序列,将避免障碍物避障方法进行细分,具体方法如下所述。
a.合作型避免型。在无人机内部路径管理模块中,输入和输出路径对障碍规避变量进行模糊描述。根据采集到的路线障碍物坐标变量特征,将无人机航行路径特征数据分成不同等级。如果无人机巡检路线的数据变量特征数值较小,那么无人机航行过程中潜在的障碍避让变量相对较少,导致输入输出变量的描述也相对粗糙[7]。在进行规避设置过程中,若检测到的无人机路径障碍物数量较多,那么路线变量数值就会相对较多,对于路径中障碍变量的描述极为复杂[8]。因此,应适当选择无人机避让数据进行描述,即对无人机规避路线的输入变量描述为:远(FAR),中(MIDDLE),近(NEAR)。
b.自主型避让型。对较大角度的无人机避让路径进行规划,将2个目标的某个单方面作为控制对象,对无人机机身的飞行路径或轨迹序列进行操控,使得目标的最小距离大于安全距离。基于此,进一步对输出变量进行描述,具体为:大(LARGE),中(MEDIUN),小(SMALL)。
展示两无人机到碰撞点位置变化原理以及障碍主体,通过摄像机搜集10个路径图像,完成对巡检路径的正向标记[9]。由于避障过程中单个路径障碍的位置计算与外界路线的实际参数存在区别,因此需要罗列出外界路径避让参数,具体参数标定数值如表1所示。

表1 参数标定数值
根据参数标定的数值设计规范及单目无人机视觉避障高斯函数的尺度区间算法,计算避让尺度区间,具体为
L(x,y,z)=G(x,y,z)×I(x,y)
(1)
G(x,y,z)为单目无人机巡检路线的高斯曲线坐标;I(x,y)为对应的障碍物坐标区域[10]。对无人机到碰撞点位置变化数值进行采集和规范,具体如图3所示。
通过图3可知,考虑目标四周安全区域的多种情况,在上述无人机航行的空间区域范围内,将潜在碰撞路径用实线表示[11]。当无人机和目标路线之间的距离越来越近时,则无人机检测路线距离障碍区域达到临界值,使得无人机路径转换过程中,其机身行动会发生变化。因此,进一步对目标路径内的最小距离进行计算,采用图3两无人机到碰撞点位置变化原理,标记障碍物,并规范障碍物碰撞避让路线,以实现对无人机巡检路径自主规避障碍的平稳操作[12]。基于上述算法,可有效实现对无人机巡检路径障碍规避方案的合理规划。

图3 无人机到碰撞点位置变化
1.3 单目无人机视觉避障的实现
结合模糊控制原理规划单目无人机视觉避障方法。针对坐标系尺寸空间数值筛选无人机巡检路径方案样本,以组为单位,对无人机航行的不同高度和角度进行最优路线的检测和判断。计算临近2个不同角度的转移路径的差异数值,根据计算结果采集不同路径方案中产生的不同尺寸空间和绕行数据,选择耗时最低、绕行最少的路径数据。由于路径的坐标体系是以路径为基础建立的,因此以路径像素为单位存储的数组越大,路径分辨能力越好。坐标原点处数组用初始点[0,0]表示,其第1行为坐标体系横轴,第1列为坐标体系纵轴,如图4所示。

图4 无人机巡检路径自主规避坐标
根据坐标数值原理,缓慢平移无人机巡检路径坐标体系的初始点,获取相应的无人机巡检路径坐标位置。将巡检单位定为毫米,对路径中待规避的物理点障碍点与路径之间的对应关系进行规范计算,具体为
(2)
X为坐标系横轴方向上障碍物分布距离;Y为坐标系纵轴方向上障碍物分布距离;D为巡检过程中待转变数值。
设无人机的飞行运行速度为z。对路径中的实际障碍物避让路径进行预测和操控处理,若在避让过程中产生的避让速度为k0,在T时刻的运行速度为k1,则进一步根据检测到的路线方案进行模拟预测,计算无人机运行速度的改变数值,具体算法为
(3)
基于式(3),进一步对待检测路径进行预测,随机采集S时刻的无人机规避约值,记为h,计算无人机避让减速数值,具体算法为

(4)
依据式(4),结合一阶和二阶增量预测原理进行最佳路径的选取,在转速随时间近似线性变化的情况下,最大程度上减少无人机航行路线的障碍物避让误差数值。并记录路径中非线性转速变化数值随时间变化的情况,获得被测无人机在特定时间段T内的周期个数为n时的控制数值K,如图5所示。

图5 无人机巡检路径转速控制数值
根据无人机巡检路径转速控制数值,可有效实现对路径误差的控制和管理。为保障无人机视觉避让效果,进一步对单目无人机视觉避障步骤进行优化,其流程如图6所示。
基于图6步骤,可有效实现单目无人机航行路线中,对潜在障碍物进行快速有效的避让处理,选取无人机的最优航行路线,提高无人机视觉避障的安全性和有效性。
2 实验结果与分析
为验证基于神经网络模糊控制的单目无人机视觉避障方法的有效性,进行对比检测,为保障检测结果的可靠性,对实验环境进行统一规范设置。
2.1 实验环境
在实验开始前设置标记模板,标记模板均使用大小统一的黑白模块,模块尺寸为18 mm×18 mm,以模块为单位,标记模块的尺寸为8×8。采用分辨率为680×480像素的摄像机,从不同的飞行角度搜集10个路径作为基础算法路径。安置飞控在运行后台上,将电池蓄电后等待无人机安检。编写无人机航行轨迹方案,其中2个航行轨迹节点1和节点2分别设置到塔杆的2个侧边。操控无人机到塔杆周围,对无人机慢速运行的阈值距离设为14 m,规避障碍的阈值距离为8 m。当毫米电波雷达应用视觉感应模块检查障碍物时会自动执行规避计划,重复以上操作6次并记录数据。
2.2 无人机避障有效率对比
基于上述实验环境,对比基于迭代重组和人工势场相结合的避障方法与基于神经网络模糊控制的单目无人机视觉避障方法的避障有效性,记录相应的检测结果,如图7所示。
分析实验结果可知,基于神经网络模糊控制的单目无人机视觉避障方法相对于传统方法而言,有更高的适用性,在无人机已知障碍物位置和目标地点的情况下,可以准确地规避障碍物并且分析规避路径。同时该算法可以在复杂的作业条件下,仍可以完成规避和路径识别任务。提高了无人机避障的准确度,保障无人机航行安全,因此该算法可以被广泛用于无人机的规避障碍物研究中。
3 结束语
为改善单目视觉无人机的航行安全性能,提出基于神经网络模糊控制的单目无人机视觉避障方法。运用SURF算法判断无人机巡检的规避角度,优化无人机规避功能模块的功能。结合模糊控制原理规划单目无人机视觉避障路径,计算避让路线数值,选择最优避障路线,提高无人机视觉避障的安全性和有效性。比较实验表明,本文所研究方法的避让时间比传统方法的短,避让有效性最高可达90%,改进了单目无人机视觉避障的准确性。