可持续闭环供应链网络设计的多目标模糊规划问题
2020-05-12李伯棠
张 鑫,赵 刚,李伯棠
(上海海事大学交通运输学院,上海 201306)
1 引言
随着全球化和工业化进程的不断加快,环境污染、生态破坏和社会问题已受到世界各国的广泛关注[1–4].2015年联合国发展峰会通过了《2030年可持续发展议程》,该议程系统规划了到2030年可持续发展的17个全球性目标,涉及经济发展、社会进步和环境保护等诸多方面[5].中国政府在2017年对这些目标的落实情况进行总结分析,并明确了未来实现可持续发展的工作重心,即在经济、环境和社会领域平衡推进落实工作[6].供应链作为劳动密集型的网链结构,也是能源消耗和环境污染的重要来源之一.近年来,公众和政府十分重视供应链企业的可持续发展问题,要求企业在实际生产中降低环境污染,并承担相应的社会责任,使得传统供应链管理逐渐向可持续供应链管理的方向转变.
供应链网络设计(supply chain network design,SCND)是供应链管理中极为重要的战略层决策.近年来,学术界将SCND与可持续发展战略相结合,以期实现经济、环境和社会三者的均衡发展[7–8].P´erez-Fortes等[9]设计了考虑可持续3个主要目标的生物质能源系统多目标混合整数规划模型;Varsei等[10]提出了葡萄酒供应链网络设计的通用模型,并通过引入社会影响系数来探究可行方案的社会影响;Chaabane等[11]采用生命周期评估(life cycle assessment,LCA)原则整合供应链的各个环节,设计考虑经济和环境影响的多目标混合整数规划模型,分析了不同环境政策对供应链战略的影响;Sahebjamnia等[12]研究了考虑可持续性发展战略的轮胎闭环供应链网络设计问题,并开发多种混合元启发式算法进行求解分析;Allaou等[13]探究了农产品–食品可持续闭环供应链设计问题,并提出了一种基于两阶段的求解方法.
实际的供应链网络设计中,客户需求、运输费用以及设施的固定成本等参数都难以确定,影响了供应链决策的有效性以及运营的可靠性[14–15].为此,多数学者采用随机规划方法进行处理[16–17].但随着产业升级以及全球化生产的推进,难以获得足够的历史数据,从而无法构建准确的参数分布函数;同时随机规划的计算复杂性较高,在实际应用中具有一定的局限性[18].鉴于此,一些学者采用模糊规划方法解决参数的不确定性问题,并取得了较好的成效[19–20].但是考虑到传统的模糊测度无法准确反映决策者态度的变化,本文采用文献[21]提出的Me测度处理模糊参数.
闭环供应链网络设计问题是一个NP-hard问题,随着问题规模和系统复杂度的增加,传统的精确算法不再适用,需要采用启发式算法求解[22].遗传算法(genetic algorithm,GA)是一种通过模拟自然进化过程搜索最优解的方法,在求解网络设计问题中具有较好的效果[23],但传统的遗传算法存在调整参数多、易早熟、局部收敛等问题[24].鲸鱼算法(whale optimization algorithm,WOA)具有操作简单、调整参数少、跳出局部最优能力强等特点[25–26],已被成功应用于工业设计[27]、最优控制[28]、流水作业调度问题[29]等领域.鉴于GA的缺点,本文将WOA和GA结合,提出一种混合GA–WOA算法,以提高算法的求解效率.
另外,对于网络优化问题解的表示,多数研究文献普遍采用普通基于优先级的编码[30–32].由于类编码方式不能直接用于GA–WOA算法.因而本文在参考优先级编码的基础上提出一种基于[0,1]随机数的双层编码方式.
综上,现有文献主要从经济和环境两个角度进行供应链网络设计,较少考虑社会因素的影响.同时,已有文献运用模糊规划方法解决闭环供应链网络设计中的参数不确定性,但这仅处理了目标函数的模糊性,并且传统模糊测度的建模灵活性相对不足[20].鉴于此,本文将综合考虑可持续闭环供应链设计的3个目标,探究目标和约束均具有模糊参数的可持续闭环供应链网络设计问题.首先,构建带有模糊参数的多目标混合整数规划模型,然后采用Me测度处理模糊目标和参数,并运用增广Epsilon-约束方法解决多目标优化问题,最后,设计一种基于[0,1]随机数的双层编码GA–WOA混合算法,该算法能够加快搜索速度且具有较强的跳出局部最优解的能力.本文所得结果将为供应链企业实现可持续发展战略提供决策参考.
2 问题描述
图1为可持续性闭环供应链网络,该闭环供应链由正向物流和逆向物流组成.其中正向物流中采购的不同零件从供应商运送到工厂,生产的成品被运输到配送中心,配送中心根据接到的客户订单予以配送;逆向物流中配送中心回收客户使用后的可循环再利用的废旧产品,经过初步处理后运送到拆解中心予以拆解,对拆解后可再利用的零件运输到工厂进行再生产,不可再利用的零件运送到填埋地予以填埋.为节约成本,配送中心兼具产品回收功能;工厂综合处理产品的制造和再制造.

图1 可持续闭环供应链网络结构Fig.1 Sustainable closed-loop supply chain network structure
为方便计算,将二氧化碳排放量作为供应链环境影响的衡量指标.系统的二氧化碳来源主要如下:各设施处理产品(零件)时的碳排放、产品(零件)在各设施间运输的碳排放和建设各设施的碳排放.采用建造各设施提供的工作机会和在运营过程中由于工作环境差异造成的工人的平均误工天数等参数来衡量供应链的社会影响[33].同时,运用LR模糊数对实际生产中客户需求、运营成本、设施处理能力等不确定参数进行处理.
在上述条件下,本文需要确定各类型设施的建造数量、位置和设施间的产品(零件)的流向、流量,并分析多个参数对所构建供应链网络的影响.
3 模型建立
3.1 模型假设与符号说明
为了研究方便,做如下假设:1)考虑具有多种零件某种产品,产品再制造后销售到同样的客户区;2)各设施的候选位置已知并且处理能力有限;3)产品的回收率和报废零件的填埋率已知;4)生产单位产品所需各零件的数目一定,并且拆解后能得到相同数目的各种零件.
为建立数学模型,定义如下符号:
1)集合:I为供应商的集合,i ∈I;J为工厂的集合,j ∈J;K为配送中心的集合,k ∈K;L为客户区的集合,l ∈L;M为拆解中心的集合,m ∈M;P为填埋点的集合,p ∈P;F为零件种类的集合,f ∈F.
3)决策变量:OJj为0~1 变量,若选择工厂j取1,否则取0;OKk为0~1变量,若选择配送中心k取1,否则取0;OMm为0~1变量,若选择拆解中心m取1,否则取0;OPp为0~1变量,若选择填埋点p取1,否则取0;xijp,yjk,zkl,okm,Rdmjf,Rzlk,Rtmpf分别为从供应商i到工厂j的f类零件运量,从工厂j到配送中心k、从配送中心k到客户区l、从配送中心k到拆解中心m的产品运量、从拆解中心m到工厂j的f类零件运量,从客户区l到配送中心k的产品运量和从拆解中心m到填埋点p的f类零件运量.
3.2 混合整数模糊规划模型
求解模糊规划问题通常要构建期望值模型、机会约束规划模型和相关机会规划模型[34].其中:期望值模型较为简单,并不增加模型的复杂度;机会约束模型能够根据决策者的态度来限定约束的置信水平,然后采用多种模糊测度处理;相关机会约束模型过于注重置信水平,求解结果较为保守.鉴于此,本文采用基于Me测度的期望值方法和机会约束方法分别处理目标函数和约束条件,构造对应的模糊规划模型,并用LR三角模糊数处理模糊参数.
根据以上描述,本文综合考虑可持续供应链的3个目标,构建如下具有期望目标和机会约束的多目标模糊规划模型M1.
目标1期望总成本最小.供应链网络设计问题的首要目标是降低运营总成本,根据问题描述,供应链期望总成本由生产成本、运输成本、固定运营成本和填埋成本构成,故模糊目标1如下:

目标2环境影响.本文用碳排量表示,主要包括在各设施间运输产品(零件)时、在各设施操作产品(零件)时以及建造各设施时的碳排量,故目标2如下:


目标3社会影响.考虑两个指标:1)创造就业机会的数量;2)因工作伤害而造成的平均损失工作天数.故目标3如下:

根据假设条件,模型的约束条件如下:


其中:∀i ∈I,∀F ∈F,∀j ∈J,∀k ∈K,∀m∈M,∀p∈P,∀l ∈L.式(4)–(9)表示各物流节点能力约束的Me测度置信水平不小于∈[0,1];式(10)–(14)表示各节点的流平衡约束;式15)表示对于每个配送中心,根据模糊回收率回收的产品量不超过客户区运到配送中心的产品量的Me测度置信水平不小于[0,1];式(16)表示各客户区需求完全被满足的Me测度置信水平不小于[0,1];式(17)–(18)分别表示对应的决策变量为0~1变量和非负整数.
4 模型的分析处理
为求解模型,首先采用基于Me测度的期望值算子和机会约束算子分别处理模糊目标和约束条件,将模糊目标和约束转化成对应的清晰对等式,然后运用加权增广Epsilon-约束方法将多目标模型转化为单目标模型.
4.1 清晰等价模型
当前文献中将模糊规划模型清晰化的模糊测度主要有可能性测度(Pos)、必要性测度(Nec)和可信性测度(Cr).可能性测度表示决策者态度极度乐观,认为存在模糊参数的不确定性事件发生的可能性最大;必要性测度表明决策者极为悲观,代表了不确定事件发生的最小可能性;可信性测度是两者的平均值,表示不确定事件发生的确定性程度[35–36].但在实践中,由于经验和判断不同,不同决策者的态度通常会在乐观-悲观两个极端之间波动.为解决此问题,Xu和Zhou[21]扩展了可信性测度,提出Me测度反映不同决策者在模糊环境下乐观–悲观态度的变化,实现模糊变量在乐观–悲观态度变化区间内的灵活取值,避免极端态度[37].Me测度定义如下:
设Θ为一非空集,P(Θ)为Θ的幂集,对任意集合A∈P(Θ),非负数Pos{A}为其可能性测度,(Θ,P(Θ),Pos)为一可能性空间,设ξ为此可能性空间中一模糊变量,那么可能性测度(Pos)的隶属函数为

集合A的必要性测度为

集合A的Me测度为

其中λ ∈(0,1)为表示决策者综合态度的乐观–悲观参数.
考虑一般多目标规划模型

其中ξ为由模糊变量组成的向量.
根据Me测度理论,分别采用期望值和机会约束算子处理式(22)的目标函数和约束条件,将式(22)转化为带有Me测度的表达式

其对应的等价下界估计模型(lower approximation model,LAM)和上界估计模型(upper approximation model,UAM)如下:

其 中:i=1,2,···,m,r=1,2,···,p,j=1,2,···,n.为一LR三角模糊变量[38–39],cij,分别为的名义值、左右扰动比率,同理定义和.
据此,模型M1的清晰等价模型M2如下:

目标函数同式(2)–(3).


其中:∀i∈I,∀f ∈F,∀j ∈J,∀k∈K,∀m ∈M,∀p∈P,∀l ∈L.
UAM:
Min E[W1]
目标函数同式(2)–(3).

其中:∀i∈I,∀f ∈F,∀j ∈J,∀k∈K,∀m ∈M,∀p∈P,∀l ∈L.
转化后清晰等价模型LAM和UAM的机会约束置信水平满足

4.2 多目标处理
本文采用加权增广Epsilon-约束方法[40–42]来处理模型的多目标问题.一般多目标规划问题的加权增广Epsilon-约束方法表达形式如下:

其中δ为一个很小的数,一般取值(10e−3,10e−6),θp为决策者所设定的目标权重且,γp为第p个目标函数的取值范围,slp为对应目标的松弛(或剩余)变量.
对于矢量εp的取值,首先先采用收益矩阵(payoff table)分别求解p −1个单目标规划问题,得到每个目标函数的最大值和最小值和,然后运用如下公式计算目标函数p和矢量εp的取值范围:

其中:∀p≠1,l=0,1,···,np,l为网格点数,γp为第p个目标函数取值范围,并被分成np个对等间隔.
根据以上描述,将目标1设为主目标,把多目标问题LAM和UAM转化为单目标问题:
式(26)(2)–(3)≡式(48)–(50)转换有

综上,通过采用Me测度和加权增广Epsilon-约束方法,将多目标模糊规划模型M1转化为两个相应的单目标等价模型:LAM以式(48)为目标,以式(2)–(3)(10)–(14)(17)–(18)(27)–(34)(49)–(50)和式(43)为约束条件;UAM以式(48)为目标,以式(2)–(3)(10)–(14)(17)–(18)(35)–(42)(49)–(50)和式(43)为约束条件.
5 求解方法
上文中混合整数规划模型的求解是个Np-hard问题,其中小规模的问题可以采用LINGO,GAMS和CPLEX等求解器解决,但是随着问题规模的扩大,求解器往往难以求解,需要采用元启发式算法解决.为此,本文运用GA–WOA混合算法进行求解,并将结果与CPLEX和GA求解结果进行比较分析.
5.1 鲸鱼优化算法
鲸鱼优化算法(WOA)是一种模仿座头鲸泡泡网觅食行为的随机群体智能算法,该算法的数学描述流程如下:
1)包围猎物.
设鲸鱼数为N,在d维空间搜索,第i个个体在搜索空间的位置为,i ∈(1,N),猎物所在的位置为对于问题的全局最优解.位置更新公式为

其中:t为当前迭代次数;为截止到当前的最优解的位置向量;为当前解的位置向量;“||”和“·”分别为绝对值和点乘符号;为系数向量,计算公式为


其中:t为当前迭代次数,T为最大迭代次数.收缩包围机制通过式(52)和式(54)随着收敛参数a的减小而实现.
2)螺旋气泡网攻击.

3)随机搜寻猎物.
鲸鱼除了采用泡泡网捕食行为,还利用随机选择的方法更新位置.当的值小于1时,执行上节的收缩包围和螺旋更新;不小于1时,执行以下等式:

5.2 编码
网络优化问题的初始解是起点|A|(供应商等)到终点|B|(工厂、客户等)的|A|×|B|的运输矩阵,并对矩阵内各节点进行资源分配.为确定分配顺序,即优先分配给哪个终点以及优先由哪个起点运输,参考文献[30–32]的初始解表达方式,提出一种基于[0,1]随机数的双层编码方法对模型的决策变量进行编码.第1层对终点|B|编码,如表1所示.

表1 染色体第1层编码实例说明Table 1 The first layer of chromosome coding example
第2层对运输矩阵进行编码.其构造如表2所示,以zkl为例,构造一个|A|×|B|(2×3)的矩阵,在每个位置随机生成[0,1]的随机数,形成zkl的第2层基因,同理可知生成yjk,Rzlk,okm的第2层基因,对于Rdmjf,xijf,Rtmpf,生成f个同类型的矩阵保存到第2层基因.
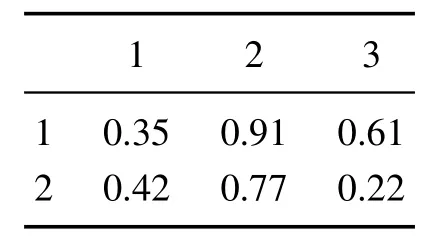
表2 染色体第2层编码实例说明Table 2 The second layer of chromosome coding example
5.3 解码
1)上节编码后的染色体无法直接求得目标函数值,需要对其解码得到相邻节点之间的运输矩阵,解码步骤如下:
参数输入:A为起点的集合;B为终点的集合;xa为起点a的能力,∀a∈A;yb为终点的需求量,∀b∈B;为终点的第1层优先级,∀b ∈B;为运输矩阵的第2层优先级,∀a ∈A,b ∈B.输出:zab为起点a到终点b的运量.

注1本节符号与模型符号相互独立,只为说明解码流程.对于含有零件f的决策变量,对每个f依次执行该步骤,构造运输矩阵.
以表1–2的编码为例,具体解码步骤如表3所示.

表3 解码过程跟踪表Table 3 Decoding process tracking table
5.4 适应度和精英保存
以目标函数值的倒数作为算法的适应度值,并将当代最优解与前次迭代得到的最优解进行比较得到截止到当前迭代代数的最优染色体和解进行保存.
5.5 WOA算法部分
将当前最优解作为“猎物”的位置,每个“鲸鱼”(染色体)向其靠近,首先产生随机数p,判断其值是否小于0.5,若大于0.5则按照式(55)–(56)更新位置;否则判断|A|的值是否小于1,若大于1则按式(57)更新位置,否则按照式(51)更新位置.并且对超出范围的个体进行修正,通过生成随机数修正其取值在[0,1]之间,具体步骤见算法流程图2.
5.6 GA算法部分
1)选择操作.
本文随机选取种群内的染色体进行后续交叉变异操作,采用经典的轮盘赌策略操作,保证GA交叉变异的随机性以避免陷入局部最优.
2)交叉操作.
采用分段交叉的方法,首先根据交叉概率随机选取染色体并两两分组,再对每组染色体生成2个[1,7]之间的随机整数并在所对应的小节执行交叉操作.例如选取第4小节和第6小节,变化过程见表4–5.
3)变异操作.
对第2层染色体进行变异操作,首先根据变异概率随机选择变异个体,然后随机选取个体中的两节,再随机在这两节各选择1列重新生成[0.1]随机数替代选中列.
综上,GA–WOA混合算法的求解流程如图2所示.

图2 GA–WOA混合算法流程图Fig.2 Flow chart of GA–WOA hybrid algorithm
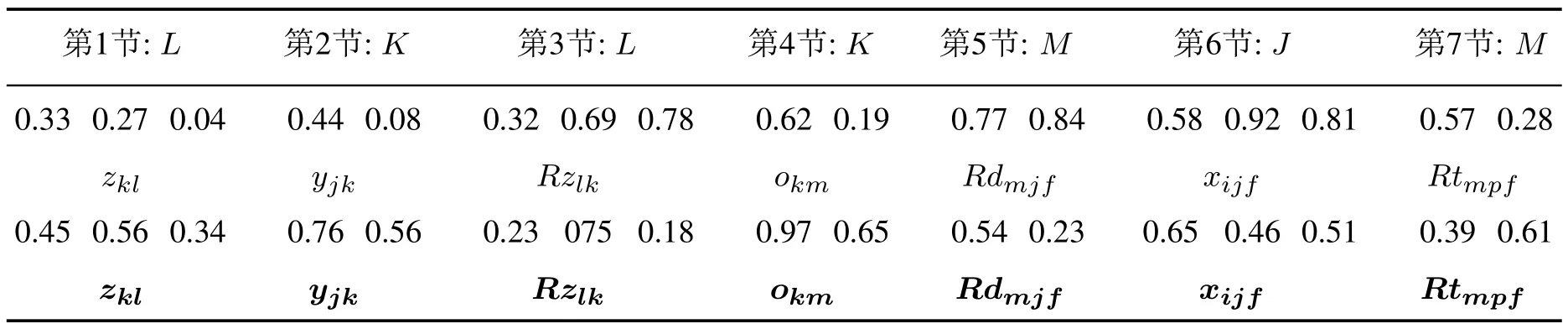
表4 交叉操作执行前的染色体Table 4 Chromosome before the crossover operation

表5 交叉操作执行后的染色体Table 5 Chromosome after the crossover operation
6 算例分析
6.1 算法比较与分析
为了验证模型和混合优化算法的有效性,设计如下算例.根据公司发展战略,为开拓一个地区的消费市场,某公司拟设计一个可持续闭环供应链,从而降低运营成本、回收再制造产品,并兼顾环境保护和社会发展的目标.根据企业的调研数据,利用均匀分布的方法随机生成各确定参数值,各LR模糊数根据首先在参数范围内根据均匀分布的方法随机生成其名义值,后左右扰动20%的规则生成.在此基础上生成6个不同规模的算例测试算法的有效性,具体赋值如表6–7.

表6 参数设置Table 6 Parameter settings
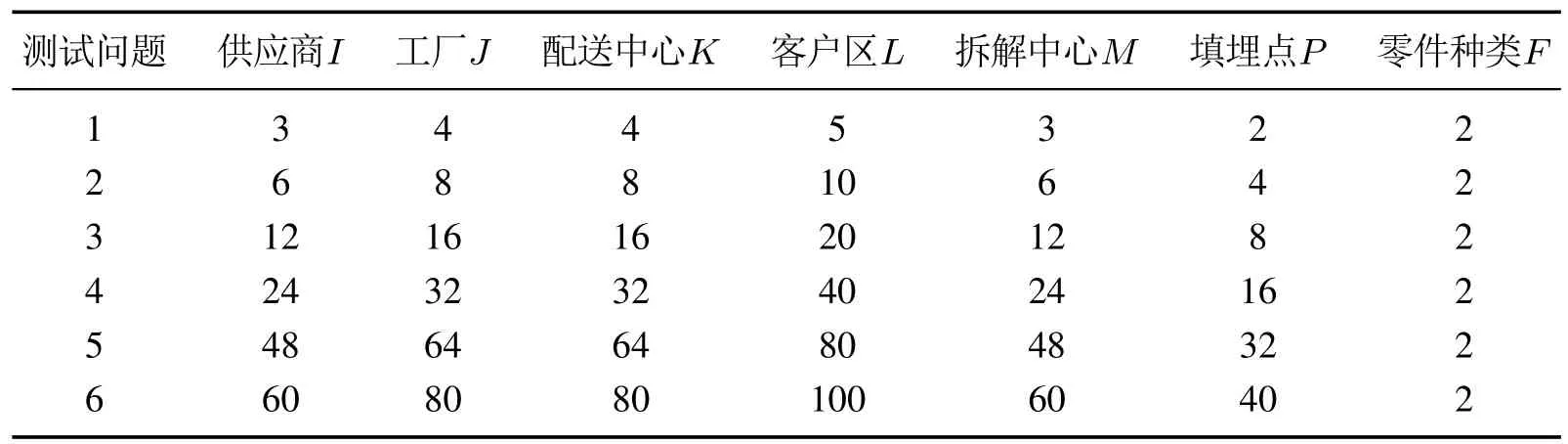
表7 测试问题的规模Table 7 The scale of the test problem
实验中,模型和算法分别利用CPLEX12.5.1和MATLAB R2017b进行求解,计算机配置为Intel(R)Core(TM)i7 2.8 GHz,4 GB内存,64位Windows10操作系统.为测试模型和算法的有效性,选择采用相似的编码方法求解网络设计问题,但并无WOA算法搜索过程的文献[43]的GA算法与GA–WOA混合算法进行比较.此外,两种算法选取相同的公共参数以保证测试的公平合理.其中:Me测度参数λ取0.5,增广Epsilon-约束中各目标函数权重值取[0.4,0.3,0.3],δ取1e−4,各约束的置信水平取90%,两算法交叉率取60~70%,变异率取10%~20%,γ2和γ3的取值由目标函数2和函数3的上、下界计算得出,ε2和ε3分别取目标函数2和函数3上、下界的中间值.根据以上参数分别求解UAM和LAM,结果如表8所示.

表8 CPLEX和算法计算结果比较Table 8 Comparisons of CPLEX and algorithm results
从表8中可见:算例1通过GA–WOA得出的目标函数值与CPLEX的求解结果一致,这说明本文提出的GA–WOA混合算法适用于网络设计问题的求解;随着问题规模的不断增大,对于算例2–3,GA–WOA混合算法求得的目标值较CPLEX所求得的目标值较大,但误差率小于1%,这说明随着问题规模递增,GA–WOA混合算法的求解的结果与最优值有误差,但是误差率较小;对于大规模的算例4–6,CPLEX无法求出最优解,且会超出运行内存无法继续求解,GA–WOA混合算法的求解结果会接近CPLEX的求解结果,且用时较CPLEX求解时间更少且对于更大规模算例6,GA–WOA仍旧能得到可行解.在对小规模算例1–3进行求解时,CPLEX求解效率远高于GA–WOA混合算法,且能够得到比GA–WOA混合算法更优的目标值,具有更好的适用性;对大规模的算例4–6求解时,采用GA–WOA混合算法的求解效率和效果更优.以上分析表明CPLEX优化软件在小规模问题的求解中优势明显,GA–WOA混合算法问题规模越大越适用.
此外,GA–WOA算法与GA算法相比,对于算例1,都能求得最优解,说明两种算法都适用于该问题的求解;对于算例2–6,GA–WOA 的解比GA 小,但运行时间长,且问题规模越大,运行时间差值越大,这是因为GA–WOA的全局搜索能力较强,能够找到质量更高的解,但是执行WOA的搜索过程需要花费较多时间来求得更好的解.
为比较GA和GA–WOA的收敛速度和求解精度,选取中等规模测试问题3,其他参数设置与表6相同值,分别求解UAM和LAM模型,所得收敛曲线如图3–4所示;UAM和LAM目标值随时间变化的曲线如图5–6所示.
根据图3–4可以看出,在种群规模、迭代次数以及其他各个参数相同的情况下,GA–WOA算法较GA算法在逃脱局部最优以及寻优精度上都表现出了优越性.根据图5–6可以看出,在相同的迭代次数下GA–WOA算法比GA算法花费时间长,但是前者的收敛速度更快,并在更短时间内找到精度更高的可行解,这也证明了上述混合算法的优越性.

图3 迭代次数和UAM最优值曲线Fig.3 The curve of iteration number and UAM optimal value

图4 迭代次数和LAM最优值曲线Fig.4 The curve of iteration number and LAM optimal value
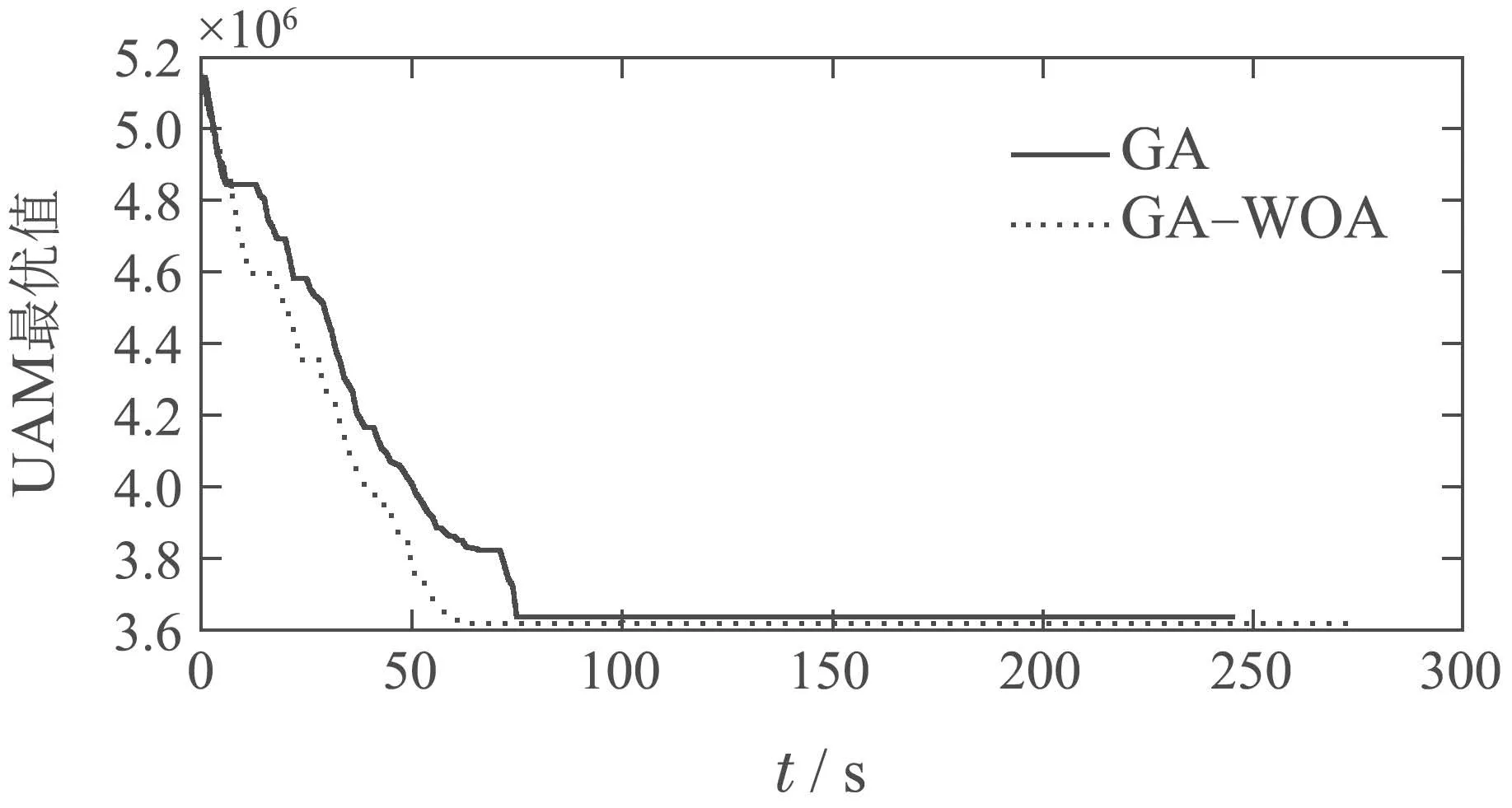
图5 求解时间和UAM最优值曲线Fig.5 The curve of solving time and UAM optimal values

图6 求解时间和LAM最优值曲线Fig.6 The curve of solving time and LAM optimal values
6.2 模型分析
为了研究各约束满足的置信水平(ω)以及各个模糊参数分别对UAM和LAM的影响,选取CPLEX和GA–WOA混合算法能同时求出最优解的算例1进行分析.
首先分析了确定性模型各目标之间的关系,分别以3个目标作为目标函数对确定性模型进行求解,计算出最优解和其他两个目标的值,结果如表9所示.
通过表9的计算结果可以看出,分别求解各目标函数时各层级设施的选址不同,且3个优化目标相互冲突,满足目标1最小成本时,会尽量减少固定投资较大的设施的建设,此时企业的碳排量增多,社会效益较小;满足目标2碳排量最小时,会优先考虑碳排量较小的设施和运输路径,此时成本较高,社会效益较小;满足目标3社会效益最大时,需要选取尽量多的设施以增加工作机会,此时成本和碳排量更大.对于决策者来说,需要权衡3个目标,并根据实际情况和企业的目标选择满足企业战略需要的最优均衡方案.

表9 各目标的最优化结果Table 9 Optimization results of each objective
对于模糊规划模型,首先分析不同置信水平(ω)对UAM和LAM的影响,取λ=0.5,θ1=0.4,θ2=0.3,θ3=0.3,ε2和ε3为目标函数2和目标函数3上、下界的中间值,各LR模糊数的左右扰动比率为20%,各ω取值相同,计算结果如图7–10所示.
从图7–10可见,对于加权目标QW和3个单目标而言,随着置信度的不断增大,目标函数的的解会增大.

图7 加权目标QW随置信水平ω变化图Fig.7 The change chart of weighted objective QW with confidence level ω

图8 目标W1随置信水平ω变化图Fig.8 The change chart of objective W1 with confidence level ω

图9 目标W2随置信水平ω变化图Fig.9 The change chart of objective W2 with confidence level ω

图10 目标W3随置信水平ω变化图Fig.10 The change chart of objective W3 with confidence level ω
这是因为较高的置信水平会使各模糊约束的严密性增加,模型的可行解区域缩小,趋向于确定性模型,从而提高系统的稳定性.置信水平增大时,UAM的值随着客户需求增加而逐渐变大,置信水平在0.5~0.7范围内变化时,由于需要增加设施以满足需求因此成本目标W1增加较快;LAM随着客户需求减少而逐渐减小,两者的差值随着置信度增大,客户需求的接近而逐渐减小.本文中社会影响仅与选址有关,置信水平的变化会影响设施选址进而影响社会目标的值.同时,对于成本最小化目标来说,决策者在UAM中考虑的是乐观态度(值更小),UAM的可行域比LAM的更大,UAM能给出更优的解,这也证实了Xu和Zhou(2013)[26]所观察到的LAM大于UAM的现象.
取置信水平ω=0.9,···,θ2=0.3,θ3=0.3,ε2和ε3为目标函数2–3上、下界的中间值,各LR模糊数的左右扰动比率为20%,分析乐观–悲观参数λ的变化对目标值的影响,计算结果如下图11–12所示.

图11 加权目标QW随乐–悲观参数λ变化图Fig.11 The change chart of weighted objective QW with optimistic-pessimistic parameter λ

图12 目标W1随乐–悲观参数λ变化图Fig.12 The change chart of objective W1 with optimisticpessimistic parameter λ
从图11–12可见,随着乐观–悲观参数λ值的增加,加权目标QW和模糊总成本目标的值呈上升趋势.本文的模糊总成本目标函数与λ取值有关,对于成本最小化目标而言,参数λ是一个“悲观”参数,在机会约束取相同的置信水平条件下,当“悲观”参数λ取值增加时,表明决策者对于未来市场更加悲观,即决策者需要更大的成本投入以应对未来的不确定性,由于确定性目标函数2–3与λ无关,因此λ值的变化不会改变目标函数2–3的计算.基于此,决策者能够根据其自身对于未来市场的预测,得到满足他们不同态度的不同决策方案,更好的应对未来市场的变化,使整个供应链具有较强的市场竞争力.
取置信水平ω=0.9,λ=0.5,θ1=0.4,θ2=0.3,θ3=0.3,ε2和ε3为目标函数2–3上、下界的中间值,分析各LR模糊数扰动比率的变化对目标值的影响,计算结果如图13–16所示.
从图13–16的变化趋势可知:与确定性模型结果表7相比,随着各LR模糊数扰动比率的增加,加权目标QW和各目标值呈逐渐增大的趋势,表明不确定性较大的模型会带来成本和碳排量的增加,并且难以得到最大社会效益,供应链中设施建设各项成本、运输费用、客户需求以及各设施能力等参数的不确定性增大时,需要增加更多的预算,构造更加复杂的运输线路,这必然会导致成本上升以及碳排量的增加,同时社会效益增大.

图13 加权目标QW随扰动比率变化图Fig.13 The change chart of weighted objective QW with disturbance ratio

图14 目标W1随扰动比率变化图Fig.14 The change chart of objective W1 with disturbance ratio

图15 目标W2随扰动比率变化图Fig.15 The change chart of objective W2 with disturbance ratio

图16 目标W3随扰动比率变化图Fig.16 The change chart of objective W3 with distur bance ratio
对于增广Epsilon-约束的相关参数,由于松弛(剩余)变量的存在,改变目标权重对加权目标求解后3个目标各自的值影响不明显.这可以基于目标的规范化来避免缩放问题,由于目标权重是在1和0之间进行缩放,改变权重只会轻微地影响目标值.因此决策者可以根据实际情况更加灵活的选择合适的权重.
综上分析,改变置信水平(ω)以及各模糊参数的值对模型的影响是显著的,通过将乐观–悲观态度和置信水平的程度纳入决策模型,可以得到区间解,为决策者提供最优决策的上限和下限.此外,决策者可以灵活的根据市场调研和前景分析确定各模糊参数的取值范围,得到更加符合实际的解决方案.
7 结论
研究可持续闭环供应链网络设计问题能够为实现经济、环境和社会三者协调发展提供理论指导和决策支持.本文针对模糊环境下多零件、多层级、多目标的多级闭环供应链网络设计问题,建立了可持续闭环供应链的多目标模糊规划模型.该模型不仅考虑了供应链网络设计中的经济目标,而且还兼顾了可持续供应链中环境和社会两方面的因素.对于模糊参数,本文采用基于Me测度的模糊规划方法,分别利用期望值规划和机会约束规划方法处理模糊目标和模糊约束,同时,该模型还利用增广Epsilon-约束方法处理多目标问题.另外,本文提出一种基于[0,1]随机数的双层编码GA–WOA混合算法求解模型,并通过算例验证了算法和模型的可行性和实用性.
进一步的研究可以系统考虑企业多产品、多阶段、多种生产方式的决策问题,分析不同算法求解该问题的效率,并细化对社会影响指标的选取和评价工作.
