基于粒子群算法–反向传播神经网络自适应的氧调器控制系统
2020-05-12范俞超孙青林董方酉陈增强
范俞超,孙青林,董方酉,陈增强
(南开大学人工智能学院,天津 300350)
1 引言
氧气面罩是在低氧或者无氧条件下工作的特殊人群保障生命安全的重要设施[1].例如飞行员的工作环境为高空低氧,精神消耗大[2],安全良好的作业需要氧气面罩提供稳定舒适的呼吸环境[3].美国《防务周刊》报道曾披露,美国亚利桑那州卢克空军基地的56战斗机联队的F–35A战斗机在飞行训练中连续出现5 起飞行员缺氧事件,全球紧急停飞了55架F–35A战机,可见研发出一款性能高效稳定的氧气面罩对于战斗机飞行员安全作业的必要性和重要性.
为了满足飞行员的供氧需求,氧气调节器必须满足大流量、低吸气阻力、快速响应等特性.目前机械式氧气调节器技术相当成熟,但是不适用于环境更为严酷、安全要求更高的航空航天作业,且具有吸气阻力大、响应速度慢等不足之处.因此,电子式氧气调节器被提上了研究日程[4].法国幻影2000飞机上出现了采用电子调节的供氧调节器,该型号调节器通过计算机运算放大器调节信号来控制氧气喷射量,从而满足呼吸用氧和加压冲压要求.法国Air-Liquide公司最新研制出了电控式供氧抗荷调节系统装备并用于美国F–35战斗机的飞行员防护系统,同时针对客机研制出了电子氧调器[5].文献[6]提出了基于自抗扰控制的电子式氧气调节器设计方法.由于国内的相关研究较少,而控制策略是电子氧调器的关键部分,因此文章对电子氧调器的控制策略进行了研究.
传统常规的比例–积分–微分(proportion integral derivative,PID)控制方法只能实现对已有误差的被动处理,而无法主动进行误差补偿,抗扰能力有限[7].中科院的韩京清研究员提出了自抗扰控制方法,采用扩张状态观测器(extend state observer,ESO)估计系统扰动,并对扰动进行补偿,从而实现扰动抑制[8–9].以上两种控制方法控制参数都固定且依靠人工整定,当氧气面罩使用者的呼吸频率发生变化时就会出现当前控制参数不适用,需要重新进行人工整定的情况.而氧气面罩的使用环境往往为低氧或者无氧的高危环境,作业要求需要电子式氧气调节器具有快速响应,控制参数自整定的功能.因此,这里采用了反向传播(back propagation,BP)神经网络自适应控制方法,BP神经网络自适应控制方法在保持传统PID 控制器结构的基础上,采用BP神经网络在线整定PID参数,提高了PID控制器的综合性能,包括抗扰动能力和对复杂多变的环境适应能力[10].BP神经网络自适应控制算法的控制效果存在初值敏感的问题,选取合适的网络权值初值能提高输入数据的预处理能力和学习速度,从而提高神经网络的收敛速度[11].这里提出采用粒子群算法(particle swarm optimization,PSO)来进行BP神经网络自适应控制算法的初值筛选,即PSO–BP神经网络自适应控制算法,让计算机进行初步多次的初值选择,减少了人力消耗[12].
本文介绍了氧气调节器工作原理以及供氧系统的数学模型,介绍了粒子群算法、BP神经网络自适应算法和PSO–BP神经网络自适应算法,并对使用PSO–BP神经网络自适应控制方法的氧调器在不同呼吸频率条件下的性能进行仿真实验,并与PID控制方法和自抗扰(active disturbance rejection control,ADRC)控制方法的仿真效果进行比较,验证了PSO–BP神经网络自适应控制算法的高效性.此外,对使用PSO–BP神经网络自适应控制方法的氧调器控制系统进行了鲁棒性验证.
2 供氧系统
2.1 氧气调节器工作原理
如图1所示,电子式氧气调节器的工作原理如下:吸气时用压差传感器检测面罩内外压强差,并反馈给微控制器,微控制器根据反馈输出不同大小的电流给比例流量电磁阀,从而控制电磁阀的开合程度,进而控制富氧空气的进入量.其中,比例流量电磁阀由螺线管和铁芯阀门组成,其工作原理为输入电压时,螺线管产生相应比例的磁力,从而铁芯阀门被提起相应的高度.呼气时,由于内部压强大于基准压腔压强,弹簧呼气阀打开,排走多余气体,从而控制面罩内外压强差为人体可承受范围.

图1 氧气调节器工作示意图Fig.1 Working sketch of oxygen regulator
2.2 氧气面罩供氧系统数学模型
氧气面罩供氧系统建模包含比例流量电磁阀的数学模型、人体呼吸的数学模型、面罩呼气阀数学模型和呼吸腔数学模型[13].
1)比例流量电磁阀模型.
比例流量电磁阀的工作原理满足输入电压信号越大阀门开度越大,比例流量电磁阀的数学模型为

式中:阀门模型参数参照的是德国Duray公司的DFCV33–05比例流量阀,G(t)是阀门出口质量流量,单位为kg/s;u(t)是控制信号,单位为v;Qmax为阀门最大流量,单位为L/min;Umax为可接受最大控制信号,单位为v;Pmax为入口处最大的压强,单位为kPa.
2)呼吸模型.
人体呼吸规律可以近似成正弦规律.因此采用的数学模型为

式中:Gr(t)是呼吸质量流量,单位为kg/s;Vi(t)是肺通气量,单位为L/cycle;n(t)是呼吸频率,单位为cycles/min.
3)呼气阀模型.
氧气面罩的出气阀门是弹簧呼气阀,呼气时面罩内压强会大于基准压强,从而弹簧压缩打开呼气阀,其数学模型为

式中:Ge表示质量流量,B表示亚临界流量常量,B∗表示超临界流量常量,µ表示流量系数,de表示出气阀的直径,Ke表示弹簧刚度,Le0表示弹簧预压缩量,Le表示阀门开度,P表示呼吸腔的压强,Pa表示基准压腔的压强,k0表示空气绝热指数,g表示重力加速度.吸气的时候,此时弹簧呼气阀处于关闭状态.
4)呼吸腔模型.
假设氧气面罩呼吸腔内满足理想空气状态方程

式中:P是氧气面罩呼吸腔空气的压强,是V氧气面罩呼吸腔的体积,M是氧气面罩呼吸腔内空气的质量,R0是空气常量,T是温度.
则氧气面罩呼吸腔内压强的动态方程可以描述如下:

式中G,Gr,Ge分别代表比例流量阀的质量流量、人体呼吸质量流量和呼气阀门的质量流量.
3 PSO–BP神经网络自适应算法
3.1 粒子群算法(PSO)
粒子群优化算法(PSO)是一种进化计算技术,由Kennedy博士和Eberthart博士提出,源于对鸟类捕食的行为研究[14].
该算法把每个寻优的问题解都当成粒子.所有粒子都在一个D维空间进行搜索,寻找最优的一个位置,由一个fitness-function确定适应值以判断目前的位置好坏,同时搜索的过程中每一个粒子都具有记住当前搜寻到的最优位置的功能.并且每一个粒子都有一个速度以决定飞行的距离和方向,这个速度根据它本身的飞行经验以及同伴的飞行经验进行动态调整[15–17].
设在D维空间中,有m个粒子.粒子i位置

粒子i速度

粒子i经历过的历史最好位置

群体内(或领域内)所有粒子所经历过的最好位置

粒子i的速度更新公式

粒子i的位置更新公式

式中:j=1,2,···,D,j表示粒子i的第j维;ω为惯性权因子,c1,c2均为加速常数,r1,r2均为在0~1之间均匀分布的随机数.此外,设置速度区间[vmin,vmax]和位置范围[xmin,xmax]对粒子飞行的速度和位置进行适当的限制.
3.2 BP神经网络自适应算法
BP神经网络结构示意图如图2所示.

图2 BP神经网络结构示意图Fig.2 Structural sketch of BP neural network
本文采用的是3层BP神经网络,包含4个输入节点、5个隐含节点、3个输出节点.如图2所示,j为输入层,i为隐含层,l为输出层;yr(k),y(k),e(k)为BP神经网络输入;kp,ki,kd为BP神经网络输出.BP神经网络自适应算法的控制结构和主体公式分别如图3和式(13)所示:


图3 BP神经网络自适应算法控制结构Fig.3 The control architecture of BP neural network adaptive algorithmic
对该算法中的BP神经网络展开如下:
1)输入层为

式中:x1(k)=yr(k),x2(k)=y(k),x3(k)=e(k),x4(k)=1.
2)隐含层的输入为

3)隐含层的输出为

式中:wij为输入层到隐含层的加权系数;f(·)为隐含层激活函数,.
4)输出层的输入为

5)输出层的输出为

式中:wli为隐含层到输出层的加权系数;g(·)为输出层激活函数,;由此可得

6)利用梯度下降法反向在线调整权值


式中η为学习率和γ为惯性系数.
输出层权值更新


隐含层权值更新

式中

基于BP神经网络整定PID的控制算法设计步骤如下:
步骤1确定BP神经网络结构,即确定输入层、隐含层以及输出层的节点和数目,并给出各层权系数的初值,选定学习率η和惯性系数γ,此时k=1;
步骤2采样得到yr(k),y(k),计算该时刻误差e(k);
步骤3计算神经网络各层神经元的输入、输出,输出层的输出即为PID控制器的3个可调参数kp,ki,kd;
步骤4计算PID控制器的输出u(k);
步骤5进行神经网络学习,在线调整权值,实现PID控制参数的自适应调整;
步骤6置k=k+1,返回到步骤1.
3.3 PSO–BP神经网络自适应算法
PSO–BP神经网络自适应算法的控制结构如图4所示.由于基于BP神经网络整定PID控制方法存在初值敏感的问题,即隐含层和输出层的初始权值的选取对系统最后的运行结果影响很大.因此需要选取不同的初始值对网络进行训练,然后再选取精度最高的网络供实际使用.这种方法带有任意性,需要大量重复的实验试验,若只靠人工选取初值并进行试验筛选,操作过于繁重枯燥.这里通过使用粒子群算法(PSO)让系统对初始权值进行自行的多次初步选取,将结果记录下来后从中选取综合效果最好的初值.

图4 BP神经网络自适应控制结构Fig.4 The control architecture of BP neural network adaptive algorithmic
具体学习过程:
1)计算BP神经网络中连接权值的总数量,即为粒子群算法中粒子的维度数值;
2)随机生成粒子种群,设定进化次数,按照粒子群算法进行迭代学习;
3)用整个系统输出的均方误差函数作为适宜度函数,来评价生成个体的好坏,优胜劣汰利用粒子群算法强大的迭代搜索能力得到使系统输出的均方误差达到最小的时候的BP神经网络权值.
4 控制仿真结果
4.1 基于PSO–BP神经网络自适应控制的氧气面罩氧调器控制仿真效果
文章提出的采用PSO–BP神经网络自适应控制来控制氧气面罩氧调器的控制策略,控制参数如下:学习速率η=0.003,惯性系数γ=0.003,初始权值为随机,通过粒子群算法选取运行稳定效果最好的稳定权值,设为控制器最终的神经网络初始权值.网络隐含层的最终初始权值wi和网络输出层的最终初始权值wo分别如下所示.此外,模型参数取值如表1所示.网络隐含层的最终初始权值为
网络输出层的最终初始权值为


表1 模型参数取值Table 1 Model parameters
呼吸频率为5,10,15次/min时的系统控制仿真结果如图5–7所示.如图5–7所示,系统稳定后,呼吸频率为5次/min、10次/min以及15次/min时,面罩的吸气阻力峰值分别为0.017 kPa,0.041 kPa,0.096 kPa,面罩的呼气阻力峰值分别为0.097 kPa,0.136 kPa,0.170 kPa.

图5 呼吸频率为5次/min的结果Fig.5 The result of respiratory frequency is 5 times/min
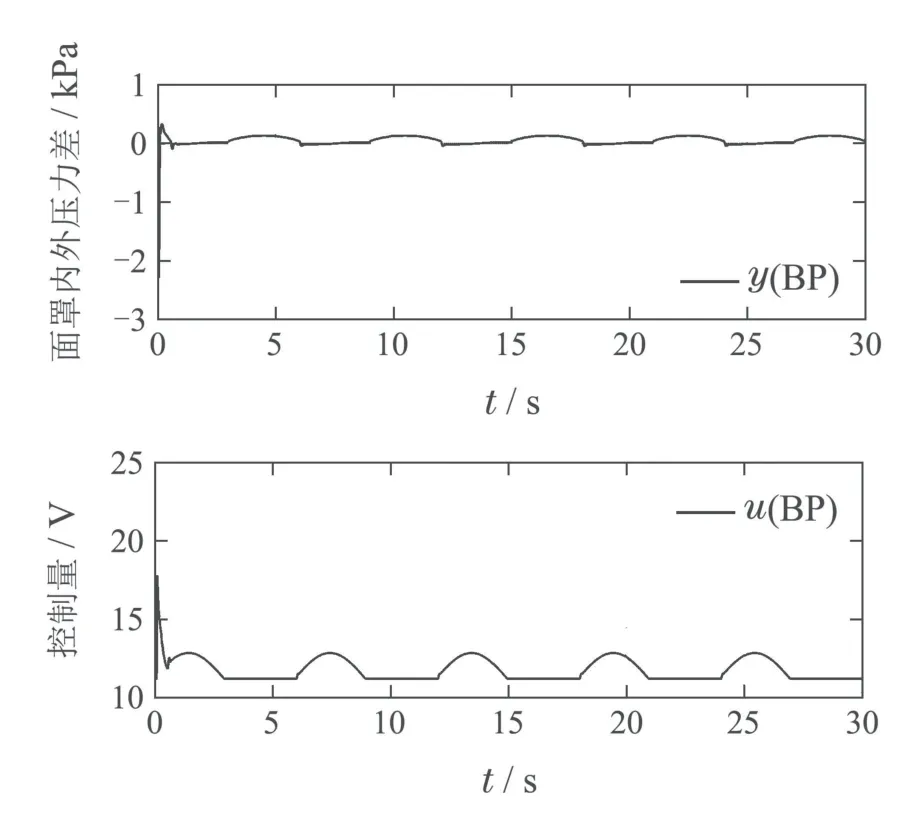
图6 呼吸频率为10次/min的结果Fig.6 The result of respiratory frequency is 10 times/min

图7 呼吸频率为15次/min的结果Fig.7 The result of respiratory frequency is 15 times/min
综上所述,采用PSO–BP自适应控制方法控制氧调器时,面罩内外压力差很小且变化平缓,响应速度快,能够快速稳定且呼吸的阻力峰值都符合航空理想呼吸阻力界限的要求,如:呼吸频率为10次/min时,符合理想呼气阻力峰值不大于0.18 kPa,吸气阻力峰值不大于0.37 kPa的界限要求.
4.2 控制仿真效果对比
为了更客观、科学评价PSO–BP神经网络自适应控制方法效果,如图8–10所示,分别展示了呼吸频率为5次/min、10次/min和15次/min时PSO–BP神经网络自适应控制方法、ADRC控制方法和PID控制方法的效果,形成对比.此外,还对变呼吸频率的情况进行了上述3种控制方法的效果对比,如图11所示.ADRC控制器和PID控制器的控制参数取值如表2所示.以上3种算法的总体对比数据如表3所示.

图8 呼吸频率为5次/min的结果Fig.8 The result of respiratory frequency is 5 times/min
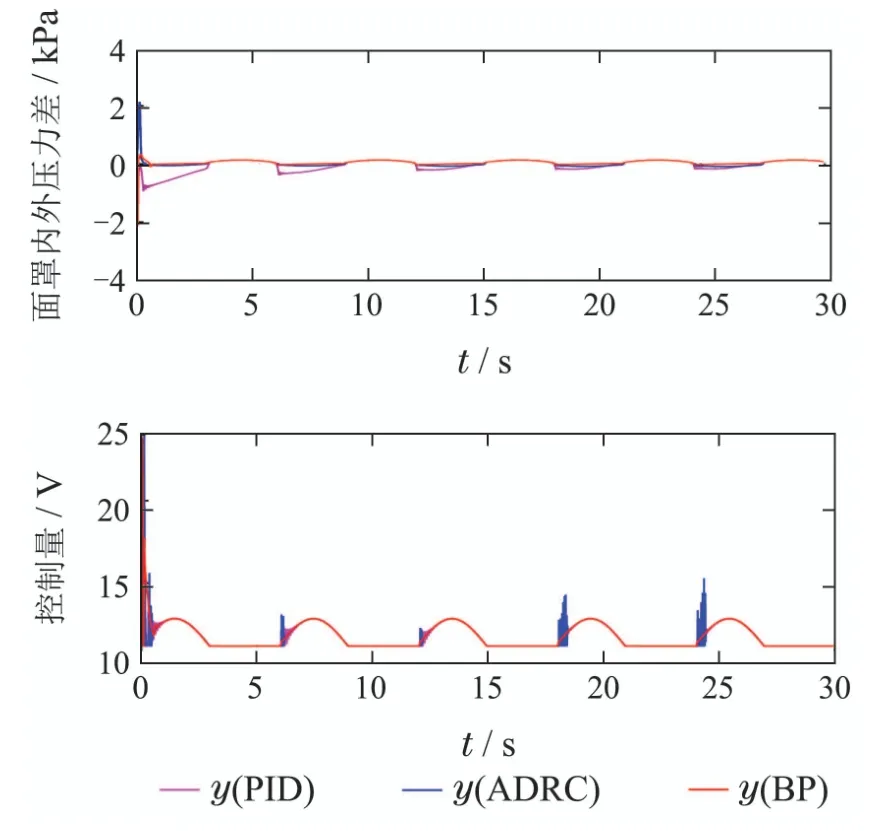
图9 呼吸频率为10次/min的结果Fig.9 The result of respiratory frequency is 10 times/min
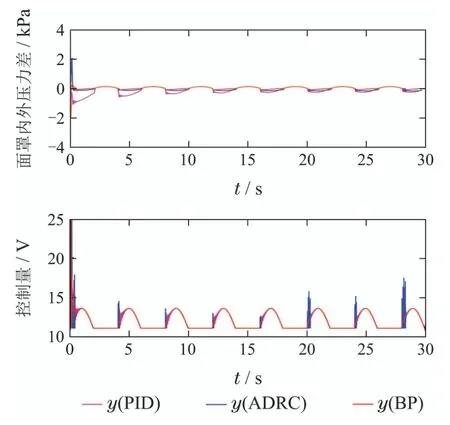
图10 呼吸频率为15次/min的结果Fig.10 The result of respiratory frequency is 15 times/min

图11 变频率时的结果Fig.11 The result of variable frequency

表2 控制器参数取值Table 2 Controller parameters

表3 算法对比数据Table 3 Algorithm comparison data
从表3以及图8–11中可以看出,显然,无论在呼吸频率固定还是变化的情况下,系统稳定时,采用PSO–BP神经网络自适应控制方法的氧气调节器比采用PID控制方法和ADRC 控制方法的氧气调节器响应更快,吸气阻力更小,控制更精密.且在呼吸频率改变时,PID控制方法和ADRC控制方法的控制参数都要进行人工微调,而采用PSO–BP神经网络自适应控制方法的控制系统则可以实现在呼吸频率变化时参数自动在线整定.
4.3 鲁棒性验证
在氧调器控制系统中,不确定性主要是由是模型参数变化所导致的,比如呼吸模型中的呼吸频率与肺通气量会随着使用者的呼吸状态和时间变化.为验证系统的鲁棒性,对比例流量阀参数a和Tv、呼吸频率n、肺通气量vi、外界气压Pa分别选取区间模型

这些参数在给定范围内作均匀分布,取200组这些参数的随机组合进行仿真,仿真结果如图12所示.此外,对上述参数取上限时,系统处于苛刻条件时的状态.模型参数苛刻时的仿真结果如图13所示.
因此,从图12–13可得,模型参数无论是随机组合还是苛刻组合,基于PSO–BP神经网络自适应控制策略的系统都具有鲁棒性.

图12 模型参数随机时的仿真结果Fig.12 Simulation results of stochastic model parameters
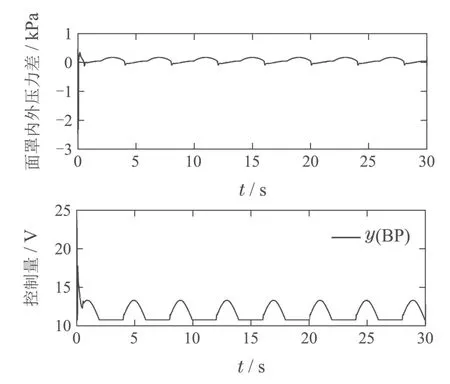
图13 模型参数严苛时的仿真结果Fig.13 Simulation results of severe model parameters
5 结论
为了满足氧气面罩中氧气调节器大流量、低吸气阻力、快速响应的特性要求,以及解决常规PID控制方法和自抗扰控制方法的控制参数在随着呼吸频率等系统条件改变时出现不符合实际最优要求进而导致需要重新人工整定参数的问题,介绍了氧气调节器工作原理以及供氧系统的数学模型,采用了BP神经网络自适应控制算法,并用粒子群算法对BP神经网络自适应控制算法的初值进行筛选.最终通过仿真实验测试算法性能,并同时与采用PID控制算法以及采用ADRC算法的仿真结果进行对比.仿真结果表明,PSO–BP神经网络自适应算法对系统的响应速度更快,控制精度更高,同时仿真控制结果均符合实际要求.此外,通过仿真验证了使用PSO–BP神经网络自适应控制策略的氧调器系统的鲁棒性.未来的工作是通过实际实验验证PSO–BP神经网络自适应算法是否满足实际工程要求.