骨科机器人辅助与传统手术治疗胸腰椎骨折的对比研究
2020-05-09周晓胡旭琪陆惠根陈宝戴加平龚遂良陈刚
周晓 胡旭琪 陆惠根 陈宝 戴加平 龚遂良 陈刚
受脊柱生理曲度影响,胸腰椎骨折是最常见的脊柱骨折,占50%~60%[1]。目前,后路椎弓根螺钉固定仍然是重建脊柱稳定性的主要手段。但传统后路切开复位内固定需要剥离椎旁肌,手术创伤较大,术后可能出现慢性腰背痛[2]。因此越来越多的学者采用经皮椎弓根螺钉固定技术或者经肌间隙入路置钉,避免对椎旁肌造成过多的损伤[3-5]。但受到患者个体解剖变异、术者操作规范以及术者临床经验等因素影响,椎弓根螺钉置入失败率可达37.5%[6]。椎弓根螺钉位置不良可能导致椎弓根螺钉强度下降,骨折复位不佳,脑脊液漏以及重要血管神经损伤。随着数字化导航技术的发展,骨科机器人的出现使经皮椎弓根螺钉固定变得安全简便。本研究通过回顾性分析比较运用骨科机器人辅助经皮置钉技术与运用肌间隙入路置钉技术治疗胸腰椎骨折的疗效。
资料与方法
一、资料
(1)病例纳入标准:单节段胸腰椎骨折;符合后路椎弓根螺钉内固定手术指征;受伤至手术时间不超过2周。(2)病例排除标准:多个椎体骨折;严重骨质疏松;椎管受压明显需前路减压;合并严重基础疾病无法耐受手术。本研究共纳入患者40例。将2019年1月至2019年6月本科运用机器人辅助治疗胸腰椎骨折患者列入机器人辅助组。将2018年1月至2018年6月期间同一主刀医师运用肌间隙入路置钉技术治疗胸腰椎骨折患者列入传统手术组。机器人辅助组22例,年龄(57.6±9.8)岁,其中男10例,女12例;传统手术组18例,年龄(54.1±6.2)岁,其中男5例,女13例。
二、方法
1.手术:(1)机器人辅助组:患者麻醉成功后取俯卧位;以软垫垫空胸腹部,背部手术区域常规消毒铺单。红外立体相机放置患者头端,无菌保护套膜将骨科机器人臂隔离。将患者示踪器固定于骨折节段邻近上位棘突上(图1),利用“C”型臂X 线机透视伤椎及标记点,确定≥5 枚标记点在透视视野内。使用西门子ARCADIS Orbic 3D系统扫描获取患者三维影像数据。完成三维影像数据与机械臂的自动配准。在操作电脑上完成椎弓根螺钉规划(图2),模拟机械臂运行无误后启动机械臂。机械臂自主运行至入钉位置后沿导管套筒方向做2 cm左右皮肤切口,置入工作套管至骨面,通过工作套管打入6枚导针。“C”型臂X线机透视再次确定位置无误(图3)。沿导针进行扩孔、丝攻加深,沿导针拧入规划好的椎弓根螺钉至相应深度。从螺钉长尾槽内进行植入预弯棒并撑开锁紧、螺钉长尾。“C”臂X 线机行正侧位透视(图4),确认螺钉位置无误,冲洗缝合伤口。(2)传统手术组: 患者麻醉成功后取俯卧位,以软垫垫空胸腹部,背部手术区域常规消毒铺单。以伤椎为中心做约8 cm切口,依次切开皮肤及皮下组织。沿棘突两侧切开腰背筋膜,经多裂肌与最长肌肌间隙显露伤椎及上下椎体两侧关节突关节。采用横突定位或人字棘定位法,置入合适长度及粗细椎弓根钉(根据术前CT测量)。“C”臂X 线机行正侧位透视,位置确认无误。安装连杆,撑开复位,锁紧尾帽。切口冲洗,放置负压引流管2枚后逐层缝合切口。
2.评价指标:观察记录两组患者手术时间、术中出血量。术后1 d记录VAS评分;术后3 d内行腰椎正侧位X线评估伤椎前后缘高度比;查CT薄层扫描,依据文献[7]标准评估椎弓根螺钉位置准确性。其中,0 级:未穿出椎弓皮质;1 级:穿出椎弓皮质<2 mm; 2 级:穿出椎弓皮质2~4 mm;3 级:穿出椎弓皮质>4 mm 或者椎弓根螺钉完全穿出椎弓根。术后3个月电话随访记录患者功能残障指数(Oswestry disability index, ODI)及疼痛视觉模拟评分(visual analogue scal, VAS)。

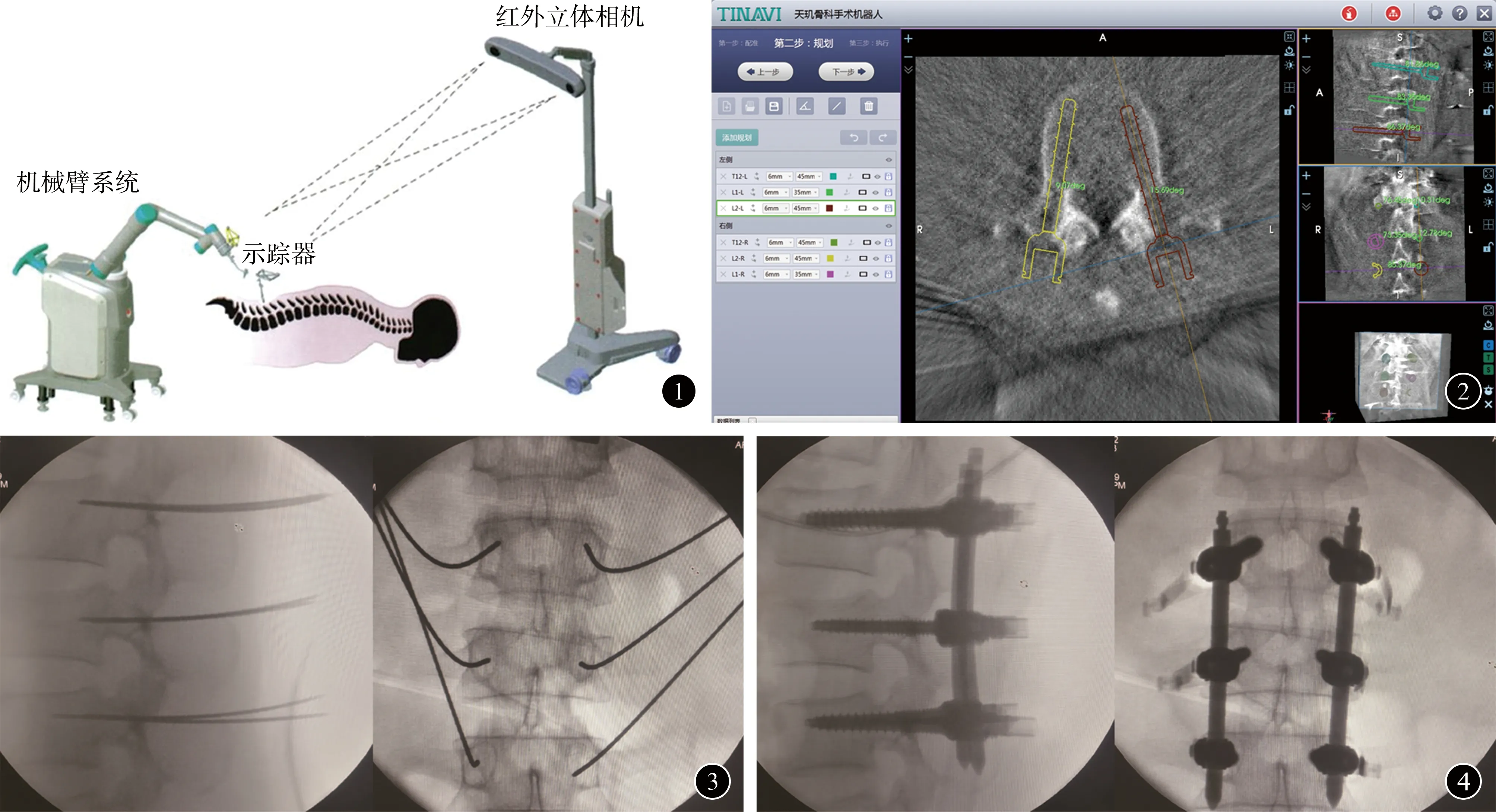
图1 骨科机器人术中示意图 图2 计算机规划椎弓根螺钉路径 图3 机器人辅助导针植入情况 图4 术中透视椎弓根螺钉位置及骨折复位情况
结 果
一、一般资料
比较两组患者年龄、性别、术前伤椎前后缘高度比、术前ODI,差异均无统计学意义(均P>0.05)(表1)。
二、手术情况
机器人辅助组出血量为(50.5±23.8)ml,传统手术组为(78.9±24.9)ml,差异有统计学意义(P<0.05)。机器人辅助组手术时间为(139.6±35.2)min,传统手术组为(103.2±15.8)min,差异有统计学意义(P<0.05)。
三、伤椎复位评估
术前机器人辅助组伤椎前后缘高度比为67.2%±8.9%,术前传统手术组伤椎前后缘高度比为68.8%±10.7%,两组差异无统计学意义(P>0.05)。术后3 d机器人辅助组伤椎前后缘高度比为83.0%±10.4%,传统手术组伤椎前后缘高度比为80.5%±8.9%。两组患者术后伤椎前后缘高度比均显著高于术前伤椎前后缘高度比(P<0.05)。术后机器人辅助组与传统手术组相比,伤椎前后缘高度比差异无统计学意义(P>0.05)。
四、螺钉准确性评估
依据文献[7]标准,两组椎弓根螺钉准确性评估结果见表2。两组患者共置入240枚椎弓根螺钉。其中机器人辅助组132枚;其中0级125枚,1级5枚,2级2枚,3级0枚,准确率为94.7%。传统手术组108枚;其中0级88枚,1级14枚,2级5枚,3级1枚,准确率为81.5%。两组间椎弓根螺钉准确率差异有统计学意义(P<0.05)。
五、ODI指数、VAS评分及术后并发症
术前两组患者ODI指数差异无统计学意义。术后3个月电话随访示机器人辅助组ODI指数17.3%±2.2%;传统手术组ODI指数20.0%±3.5%。两组差异无统计学意义(P>0.05)。术前两组患者VAS评分差异无统计学意义。术后1 d机器人辅助组VAS评分为(5.4±1.3)分,传统手术组(6.4±1.3)分,两组差异有统计学意义(P<0.05)。术后3个月机器人辅助组VAS评分为(2.9±0.9)分,传统手术组为(2.8±0.8)分,两组差异无统计学意义(P>0.05)。术后两组患者均未出现因椎弓根螺钉导致神经损伤。传统手术组患者出现1例尿路感染,1例右下肢深静脉血栓(表3)。
讨 论
目前,后路椎弓根螺钉固定仍然是治疗胸腰椎骨折的主要手段。但传统后路手术需沿棘突椎板广泛剥离椎旁肌直至显露关节突,手术创伤大,术后容易导致慢性腰背痛。经肌间隙入路椎弓根螺钉固定与经皮椎弓根螺钉固定符合脊柱微创理念,尽可能避免对多裂肌的剥离、牵拉损伤,减少多裂肌失神经支配,是胸腰椎骨折微创治疗的两种主要方式[8]。经肌间隙入路置钉技术与传统后路正中入路置钉技术差别不大,较易掌握。与之相比,经皮椎弓根螺钉固定技术对术者要求更高,且射线量更大[9]。但据统计即使是开放置钉仍有10%左右的调钉率,螺钉的调整也会导致螺钉把持力大大下降[10]。而且传统手术术中螺钉的粗细、长度主要依靠术中透视图像的粗略估计,无法达到最大优化。

表1 两组患者年龄、性别、术前伤椎前后缘高度比、VAS评分、ODI指数的比较
注:VAS为疼痛视觉模拟评分;ODI为术前功能残障指数

表2 两组患者椎弓根螺钉置入准确率的比较

表3 两组患者术后ODI指数、VAS评分的比较
注:VAS为疼痛视觉模拟评分;ODI为术前功能残障指数
近年来,随着数字化导航技术的发展,骨科机器人技术已成功运用于临床。天玑骨科机器人根据术中患者CT扫描重建三维影像并预先规划螺钉钉道、粗细及长短,真正实现个体化螺钉设计,理论上置钉误差可降至亚毫米级。有学者认为通过机器人辅助置钉理论上可以使得螺钉位置最佳即螺钉位置安全、长度达到最长、螺纹最粗、把持力最强,这必然有利于骨折椎体复位及复位后椎体高度维持[11]。本研究发现机器人辅助与传统手术均可使胸腰椎骨折有效复位,手术出血量机器人组明显少于传统手术组,术后两组患者伤椎前后缘高度比均显著高于术前伤椎前后缘高度比,术后3个月ODI指数两组无显著差异。这与以往研究报道相符[12-14]。术后第1天机器人组VAS评分显著低于传统手术组,因此机器人组患者可以更好地配合早期功能锻炼,有利于减少术后尿路感染、下肢静脉血栓等并发症。由于引进天玑骨科机器人时间短,尚缺乏对机器人辅助置钉伤椎高度维持情况的长期随访。
研究表明,经不同机器人系统辅助下椎弓根螺钉准确性远高于传统徒手置钉,避免了术中螺钉调整导致螺钉松动或者术后内固定相关并发症[15-16]。在本研究中,机器人辅助组椎弓根螺钉准确率达94.70%,传统手术组椎弓根螺钉准确率为81.5%,与前期报道相符。当然机器人辅助椎弓根螺钉置钉也存在一定失败率,主要与以下几个因素相关:(1)椎弓根变异导致椎弓根本身较细,此时建议规划时选择合适粗细螺钉;(2)患者俯卧位全麻后呼吸运动导致椎体移动增加机器人定位及操作误差,因此需提醒麻醉医师控制潮气量;(3)置钉前不合理规划,克氏针进针点位于骨性突起尖部,电钻启动时克氏针易打滑移位,规划时应尽量避免。
本次研究还发现机器人辅助组手术时间显著长于传统手术组,这与部分文献报道不符[14]。根据朱金文等[17]的经验,机器人辅助下治疗胸腰椎骨折一般需要10例左右患者方可完成学习曲线。鉴于术者操作经验及熟练度等因素影响导致前期患者手术时间相对较长。
总之,利用骨科机器人辅助治疗胸腰椎骨折可取得良好的骨折复位效果。与传统手术相比,骨科手术机器人具有创伤小、精度高、可重复性好和耐疲劳等优点[18]。随着经验的不断积累,硬件设备及辅助软件的不断更新,骨科手术机器人必将广泛深入运用于临床。
