BP神经网络补偿ADRC在PMSM控制中的研究
2020-04-18李寅生陈永军
李寅生,陈永军
(长江大学 电子信息学院,湖北 荆州 434023)
0 引 言
传统的PMSM矢量控制系统采用内环电流环外环速度环的双闭环控制策略,双环内的电流控制器和速度控制器均采用PI控制算法。然而传统PI控制存在着对参数变化敏感、抗干扰能力差和积分环节容易导致系统震荡不稳定等不利因素[1]。
鉴于传统PI控制存在的一系列问题,自抗扰控制(ADRC)作为一种改进于传统PI的非线性控制算法,利用扩张状态观测器(ESO)对系统未建模动态、参数变化和系统外扰所引起的综合扰动进行观测并进行补偿,可有效提高控制系统的鲁棒性和抗干扰能力,ADRC取消了反馈控制中的积分环节,通过补偿干扰量消除稳态误差,优化了控制的稳定性。出于ADRC的优异动稳态性能,其被广泛应用于PMSM矢量控制,文献[2]采用二阶ADRC整合PMSM矢量控制的位置环和速度环,并采用一阶ADRC作为电流控制器,有效改善系统的动稳态性能;文献[3]利用ADRC实现电机的解耦控制,并利用ESO直接电机位置角和转速,实现永磁同步电机无位置传感器控制;文献[4]采用简化的自抗扰控制器对永磁同步电机进行控制,取消了TD模块,简化了参数整定,优化了系统的实时性。然而以上三种方法均未考虑ADRC存在的局限性:ADRC的性能受到了干扰类型的制约,应对大幅度高速率变化的干扰,ADRC控制器显得捉襟见肘。
由于传统自抗扰控制器的扩张状态观测器(ESO)对干扰的观测精度受干扰量变化的影响[5],传统ESO要跟踪上变化速率和幅度较大的干扰必须设置较大的观测增益系数,然而过大的观测增益系数会引起系统的稳态抖震,造成不稳定,这样就存在稳定性与抗干扰的一个矛盾。为解决这个问题,文献[5]提出利用模型补偿降低ESO观测的干扰量,降低ESO的观测负担。文献[6]对电机的转动惯量和负载转矩进行辨识并补偿给ESO,减少了ESO的干扰观测量,但是该方法算法复杂,运算量较大,不利于控制的实时性。
本文提出了新的方法,速度环采用简化的一阶ADRC作为速度控制器,同时利用BP神经网络出色的非线性函数拟合能力[7]对永磁同步电机的干扰函数进行离线识别,然后再将训练好的神经网络运用于对ESO干扰量的补偿,降低ESO的观测负担,进而提高观测精度,优化控制器的抗干扰能力。另外为了对负载转矩进行实时辨识,设计了降阶伦伯格负载转矩状态观测器[8],实时对电机所受负载转矩进行观测,并将观测的负载转矩数据用于BP神经网络的离线训练输入和在线输入。
1 PMSM数学的模型
研究的是表贴式永磁同步电机,忽略PMSM的涡流和磁滞损耗,假设其磁路不饱和,可以建立在d-q坐标系下的PMSM的微分方程组:
(1)
式中,R和Ls分别表示电机的定子电阻和电感;φf是永磁体磁链;id、iq是定子电流的d-q轴分量;J和B分别是电机的转动惯量和阻尼系数;w,TL分别是机械角速度和负载转矩;pn是极对数。
采用id=0的电流控制策略,则式(1)转化为如下:
(2)
由式(2)可知,电机所受的主要未知干扰为TL,其直接作用于电机的转速微分方程。
2 自抗扰控制PMSM
2.1 自抗扰控制
传统自抗扰控制器由三部分组成,微分跟踪器(TD)、扩张状态观测器(ESO)和状态反馈控制律。微分跟踪器(TD)合理安排给定输入的过渡并求取其各阶微分,避免阶跃输入引起的启动超调;扩张状态观测器(ESO)以系统内外综合扰动作为扩展状态量,对其进行估测;非线性状态误差反馈控制律(NLSEF)对TD与ESO的各阶误差进行非线性组合得到非线性反馈控制量,然后利用ESO估测的综合干扰量对反馈控制量进行补偿,得出最终控制量。
由于传统ADRC采用的非线性函数参数整定复杂,不利于工程实际应用,本文对ADRC进行简化:采用直接误差取代原非线性函数,将ESO和NLSEF线性化,保留非线性TD。
以一阶ADRC为例,假设某一阶被控对象的状态空间模型为:
(3)
其中,将f(x,t)+w(t)视为被控对象的内外综合扰动,u为控制量,x是系统状态量,b为控制增益,设计以下一阶简化ADRC:
(1)一阶非线性TD
(4)
(2)二阶线性化ESO
(5)
(3)线性化反馈控制律
(6)
其中,z11为给定输入,z21为x的跟踪值,z22为综合干扰的估测值,[β01,β02]为ESO状态反馈增益矩阵,其中β02决定了z22对真实扰动变化的响应速度,r是TD跟踪快慢因子,b0是估测的控制增益。fal(·)是非线性函数,表达式如下:
(7)
式中,α为非线性因子,δ线性区间宽度。
2.2 简化的一阶自抗扰速度控制器
由(2)可知,转速微分方程为一阶微分方程。在矢量控制系统中,大部分干扰发生于速度环以内,电流环以外。所以可以采用一阶ADRC控制器作为速度控制器以提高速度环的抗干扰能力,而电流环则沿用传统PI控制器作为电流控制器。
由式(2)可得PMSM矢量控制速度环被控对象状态方程如下:
(8)
(9)
式中,
(10)
根据(4)、(5)和(6)可得简化的一阶自抗扰速度控制器形式如下:
一阶TD:
(11)
线性化的二阶ESO:
(12)
比例误差反馈控制律:
(13)
简化的一阶ADRC速度控制原理如图1所示。
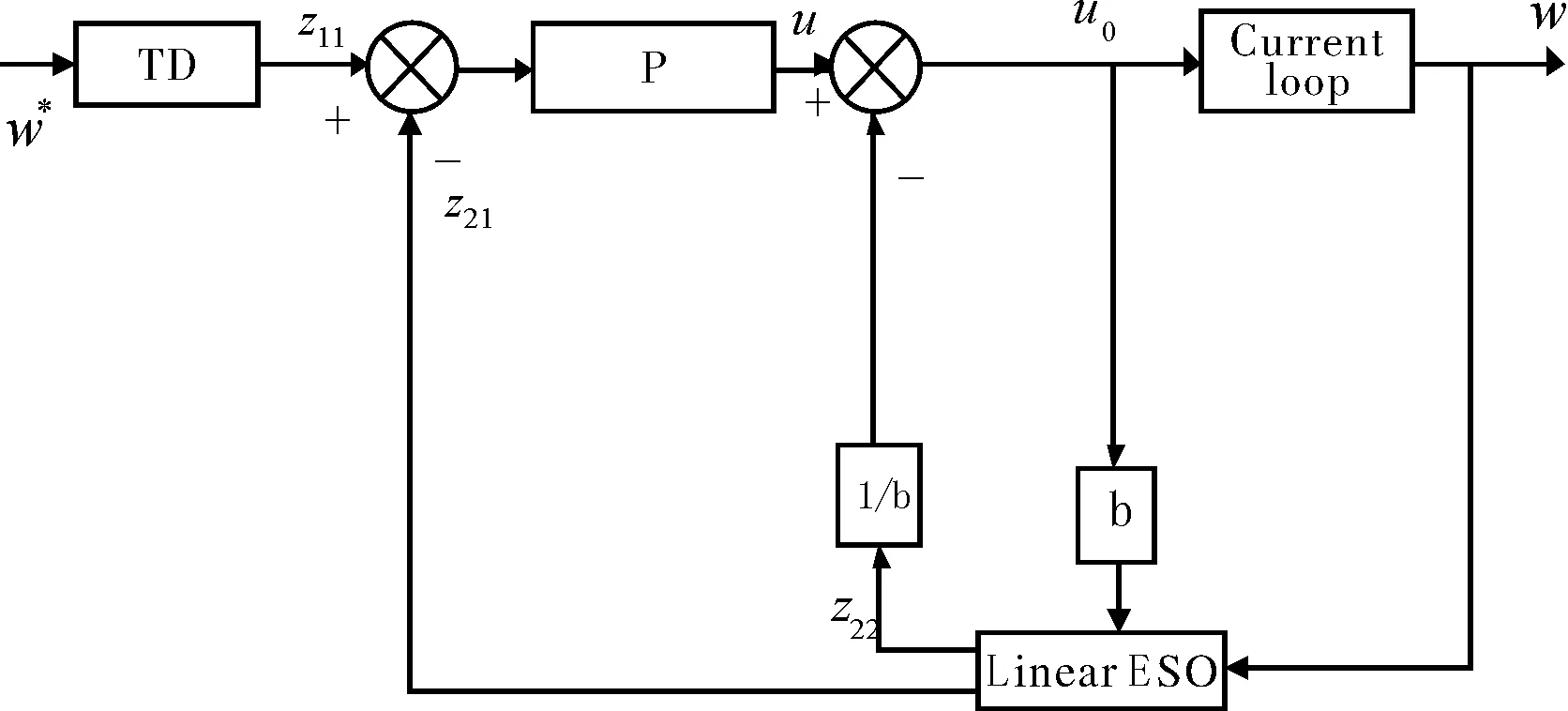
图1 一阶简化ADRC速度控制原理图
3 神经网络补偿ADRC
3.1 PMSM的ADRC补偿优化
由PMSM矢量控制速度环控制对象的状态方程(9)和一阶简化ADRC形式可知,在干扰量f(w,TL)完全不可知的情况下,ESO要观测的综合干扰量为
z22=f(w,TL)+(b-b0)u
(14)
当发生的干扰量变化过大,这时为了保证观测器的收敛速度,必须设置较大的观测增益系数β02,然而过大的β02会引起稳态观测值的抖震,造成就系统不稳定,过小的β02会削弱ESO对干扰的响应速度,弱化了ADRC的抗干扰能力,系统的鲁棒性下降。因此这就需要在系统稳定性和抗干扰能力之间做一个折中,这无疑大大限制了ADRC的性能。
为了保证ADRC稳定性的同时最大限度地提高系统的抗干扰能力,就要减少z22所要观测的干扰量幅度。由(14)可知,可将f(w,TL)分为两部分
(15)
f0为系统的可辨识干扰,f1为系统的未知干扰,如果将f0补偿给ESO,则z22只需要观测剩下的f1+(b-b0)u。这样就能降低ESO的估测负担,使其在较小的β02下也能快速跟踪上余下的干扰量,提高了ESO对干扰量的观测精度,优化ADRC的抗干扰能力。
3.2 BP神经网络辨识补偿ADRC
由以上分析可知,实现ADRC补偿优化的关键是辨识出系统的f0。只要辨识的f0越接近f(w,TL),最终ESO所要观测的z22就会越小,观测精度就会越高。由于f(w,TL)里边的J和B是未知的,要对f(w,TL)进行辨识,就必须先辨识出J和B是未知的,这无疑会带来较大的运算量,不利于控制的实时性。
为了更加快捷地实时辨识出f(w,TL),本文提出了一种新的方法:利用BP神经网络出色的非线性函数拟合能力对f(w,TL)进行辨识并将辨识好的f(w,TL)补偿给ESO。
BP神经网络具有出色的自学习能力,通过对样本的训练和学习修正网络内部的权值,能有效拟合各种未知函数。假设f(w,TL)就是这样一个未知函数,利用BP神经网络辨识表达f(w,TL)。
具体实现方法:
(1)确定BP神经网络的拓扑结构,由式子(15)可知,应设定神经网络输入为w、TL,目标输出为z22。因此输入层节点数是2,输出层节点数是1,经过多次仿真修正隐含层节点数,当隐含层节点数为5时,神经网络拟合效果最好。
(2)设置好一组控制器参数,使ADRC平滑稳定控制好永磁同步电机,采集系统稳态数据作为训练样本。
(3)利用已收集的训练样本对神经网络进行离线训练,离线拟合系统干扰函数。
(4)把训练好的神经网络fNN嵌入到永磁同步电机一阶ADRC速度控制器中,用以补偿ESO。
基于BP神经网络补偿ADRC的形式如下:
(1)BP神经网络补偿的二阶线性ESO:
(16)
(2)BP神经网络补偿的比例误差反馈控制律:
(17)
基于BP神经网络补偿优化的ADRC转速控制原理图如图2所示。
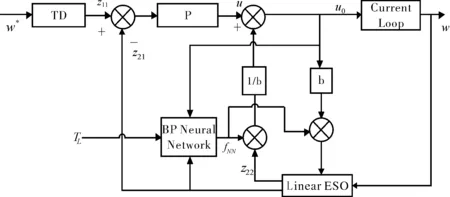
图2 神经网络补偿ADRC速度控制原理图
4 负载转矩状态观测器
神经网络的输入参数包含负载转矩,由于负载转矩是一种难以利用传感器测量的物理量,本文采用了降阶的伦伯格状态观测器对负载转矩进行实时检测。
假设负载转矩在单个控制周期内保持不变。

(18)
以TL作为系统的扩展状态量由方程(8)可得系统的状态空间模型:
(19)
根据(19)可得降阶的伦伯格负载转矩观测器形式如下:
(20)
K=[k1k2]T是状态反馈增益阵。
设状态观测器的期望极点为α,则可得状态误差特征方程
|SI-(A-KC)|=(S-α)2
(21)
忽略阻尼系数,可得
(22)
当α处于负平面时,观测误差渐进收敛于0。
将伦伯格状态观测器实时估测的负载转矩与z21一道直接输入到离线训练好的神经网络中,得出干扰补偿量fNN。
5 PMSM矢量控制仿真与分析
在Matlab/Simulink上利用S函数设计出一阶简化ADRC和负载转矩观测器。仿真所用PMSM模型参数如表1所示。
仿真验证主要分为以下两部分:
(1)验证ESO增益系数β02对系统稳态稳定性及抗干扰能力的影响。
(2)验证神经网络补偿ADRC的优化效果。
仿真设定的ADRC参数为:r=1000,α0=0.5,δ0=0.01,β1=3,b0=256.73,β01=4800,β02为仿真变量。
为了验证β02对系统稳态稳定性和抗干扰能力的影响,将其设置成不同的数值,对不同β02下的干扰补偿量z2和抗负载能力进行分析。
速度环采用一阶简化ADRC,根据图1搭建仿真模型,空载工况下,设置转速在0 s由0阶跃到,在0.25 s时突加大小为20 Nm的阶跃负载。当增益系数β02分别取值1760 000、3760 000、5760 000时,ESO观测所得综合干扰z2分别如图3的a、b和c所示。
当增益系数β02分别取值1760 000、3760 000、5760 000时,突加负载部分的转速响应曲线如图4的a、b和c所示。

由图3突加负载部分可知,随着β02的增大,ESO对阶跃负载的响应速度越快,抗干扰能力越强。
由图4可知,随着β02的增大,电机在突加负载下的转速降越小,转速恢复时间越短,这也直接印证了,β02越大,ADRC速度控制器的抗干扰抗负载能力越强。
以上仿真得出一个结论:β02越大,系统稳态稳定性越差,抗干扰能力越强。综合对系统稳定性和抗干扰能力的要求,β02的取值必须做一个折中。
为了最大限度地实现ADRC速度控制器稳定性和抗干扰能力双优化,采用BP神经网络补偿ADRC方案,利用Matlab的神经网络工具包搭建离线BP神经网络,并通过仿真收集的稳态数据对神经网络进行离线训练。最后把训练好的BP神经网络嵌入ADRC中,根据图3搭建出基于BP神经网络补偿ADRC永磁同步电机矢量控制系统。为了保证模型具有良好的稳态稳定性,取β02=1760 000。


图5 转速响应曲线局部放大

图6 ESO的干扰观测值

图波形
由图5可知,突加20 Nm负载后,采用BP神经补偿ADRC速度控制器的电机出现的最大转速降为41.5 r/min,再次恢复到稳态所用时间约为0.0055 s;采用不带补偿的ADRC速度控制器的电机则出现47 r/min的最大转速降,恢复到稳态的时间用了0.0131 s。显然,采用BP神经补偿ADRC有效提高PMSM矢量控制系统的抗负载抗干扰能力。
由图6可知,采用BP神经网络补偿后ADRC的ESO在启动阶段和突加负载阶段的观测干扰值波动幅度较无补偿的要小。尤其在突加负载阶段,由于添加了BP神经网络对干扰量的补偿,ESO观测干扰的波动幅度远小于无补偿ADRC,这无疑大大降低了ESO的观测负担,提高了ESO对干扰量观测精度,降低了对ESO响应速度的要求,使其在较小的反馈增益系数β02下也能保持较优的抗干扰抗负载能力,这也是BP神经网络补偿ADRC实现稳态稳定性和抗干扰能力双优化的机理。
6 结 论
采用一阶简化ADRC作为永磁同步电机矢量控制系统的速度调节器,可有效提高系统的动稳态特性,优化系统的抗干扰能力与鲁棒性。
针对ESO存在抗干扰能力和稳态稳定性必须折中处理的问题,提出了BP神经网络补偿ADRC的方法。利用BP神经网络去识别干扰函数,并将其补偿给ESO,有效减少ESO观测的干扰量幅值,使其在较小的反馈增益系数β02下也能维持较好的抗干扰能力,实现了ADRC稳态稳定性和抗干扰能力的双优化。