基于MRAS的异步电机无速度传感器应用研究
2020-03-25包广清祁武刚
包广清,祁武刚
(兰州理工大学 电气工程与信息工程学院,兰州 730050)
0 引 言
在自动化装配领域中,工业机械臂是最常见的形式。异步电机无速度传感器矢量控制技术由于成本低、可靠性高的特点,被广泛应用于机器人的关节驱动控制系统中。目前,已经有多种方法实现了对异步电机的速度辨识,如扩展Kalman[1-2]、线性矩阵不等法[3]、滑模观测器[4]、全阶观测器[5]和模型参考自适应法[6]等。
模型参考自适应(以下简称MRAS)由于算法简单、稳态精度较高已被广泛应用于电机的控制,但仍存在一定的缺陷。
基于转子磁链模型的MRAS观测器,在低速时检测精度差,且存在积分误差和误差积累的问题[7];文献[8]将无功功率与MRAS相结合,收敛速度较快,鲁棒性也有所提高,但未考虑电机参数变化时的转速辨识问题;文献[9]利用反电动势的MRAS转速观测器,成功地避开了纯积分的问题,但是此方法在低速时估计值误差值较大;文献[10]将滑模控制策略作为MRAS结构中的自适应机制,但电压参考模型中依然存在纯积分的问题;文献[11]采用一种可以同时进行转速和定子电阻辨识的双参数的MRAS模型,此方法对电机的定子电阻辨识度较高,却增加了系统的复杂性;文献[13]提出以模糊逻辑作为MRAS结构中的PI自适应率,此方法改善了传统PI参数不能在线更新的问题,却忽略了电压参考模型中的积分问题。
本文在基于转子磁链模型的MRAS速度观测器的基础上,采用一阶惯性环节代替电压模型中的纯积分环节,以消除积分直流偏置的问题,同时设计了一种自适应线性(以下简称ADALINE)神经元PID控制器,ADALINE可以根据电机磁链、转速的变化情况对自身的参数进行在线权值修正,该控制器改善了传统的PI控制器不能根据电机的实际情况进行在线参数修正的问题,提高了速度观测的精度。仿真结果验证了该算法的可行性。
1 异步电机数学模型
三相异步电机在两相静止坐标系α,β下的电压方程:
(1)
式中:usα,usβ为定子绕组电压在α,β轴分量;urα,urβ为转子绕组电压在α,β轴分量;isα,isβ为定子绕组电流在α,β轴分量;irα,irβ为转子绕组电流在α,β轴分量;ψsα,ψsβ为定子绕组磁链在α,β轴分量;ψrα,ψrβ为转子绕组磁链在α,β轴分量;Rs,Rr为定、转子单相绕组电阻;ω为转子角速度。
磁链方程:
(2)
式中:Ls,Lr为α,β坐标系上定、转子绕组自感;Lm为α,β坐标系上同轴定、转子绕组间的互感。
转矩方程:
Te=pLm(isβirβ-isαirβ)
(3)
式中:Te为电磁转矩;p为异步电动机的极对数。
运动方程:
(4)
式中:J为机组的转动惯量;TL为包括摩擦阻转矩的负载转矩。
2 无速度传感器的速度观测模型
2.1 MRAS速度观测器的原理
转子磁链观测器有两种不同的模型:电压模型和电流模型。
电压模型:
(5)
电流模型:
(6)

由式(5)和式(6)可知,ω是待辨识的参数。如图1所示的速度辨识系统中,可调模型和参考模型分别为转子磁链的电流模型和电压模型。
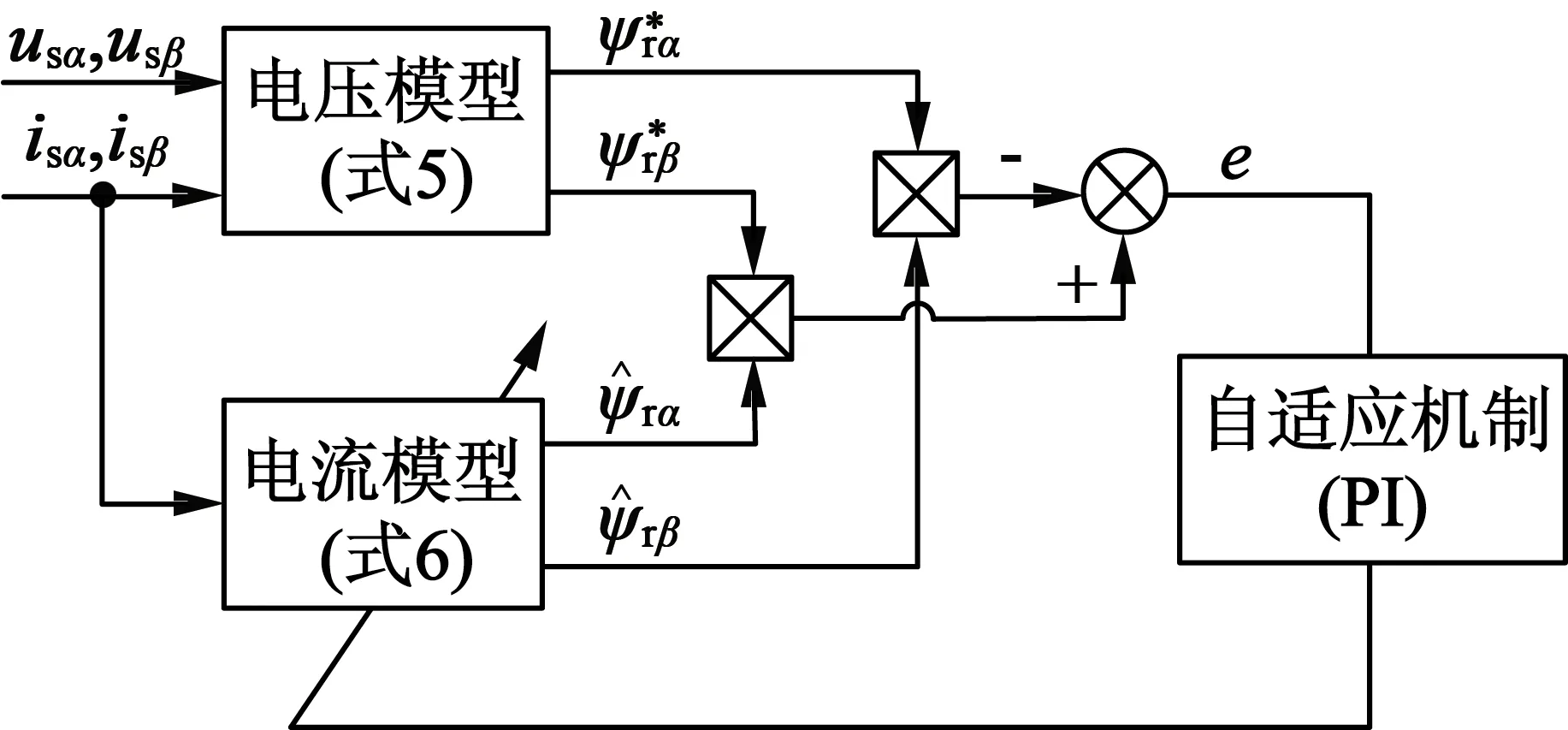
图1 MRAS速度辨识框图
根据Popov超稳性定律,该MRAS系统是渐进稳定的。在图1中取广义误差e作为MRAS自适应律的输入值,定义广义误差e:
(7)

以PI为MRAS自适应率,计算电动机转速ωr:
(8)
式中:KP为比例系数;KI为积分系数。
2.2 改进的MRAS转速估算方法

转子的反电动势:
(9)
转子磁链估计的动态方程:

(10)



图2 改进后的电压模型原理图
2.3 基于ADALINE的并联双模型速度辨识
传统的基于转子磁链的MRAS转速辨识方法中,PI调节器不能根据电机磁链、转速的变化进行在线修正,因此其误差较大。本文将ADALINE作为MRAS的自适应机构,其权重参数在线修正,所以使得速度观测更加准确。
由式(7),采用PI调节器对磁链的广义误差进行处理,但PI参数的选取受制于异步电机的数学模型,事先选取适合的PI参数存在一定的困难。而ADALINE可根据外界的输入和期望响应,其权值进行动态的调整,因此采用ADALINE代替传统MRAS中的PI自适应率。ADALINE模型如图3所示。

图3 ADALINE结构模型
图3中:x1(k),x2(k)和x3(k)为输入信号;ω1(k),ω2(k),ω3(k)输入信号的权重。根据转子的广义误差e,定义状态变量:
(11)

(12)
为了保证系统的收敛性,采用最小均方误差算法(以下简称LMS)来修正ADALINE的加权系数。定义目标函数:
(13)
LMS算法是一种特殊的梯度估计算法,其权重系数采用反梯度向量进行反复迭代更新。根据梯度法,其权值系数的修正公式如下:
(14)
将式(12)和式(13)代入求偏导,可得:
(15)

(16)
结合式(11)、式(14)、式(15)、式(16),得到速度观测器中权值自学习的差分表达式:
(17)
根据每次转子磁链估计误差计算此时的状态变量,由式(17)进行权值更新,由式(11)得到电机的转速估计。
3 仿真与结果分析
改进后的MRAS速度观测器的控制系统如图4所示,并在MATLAB/Simulink环境下对此控制模型进行仿真分析。

图4 基于改进的MRAS速度观测器控制框图
电机的仿真参数如表1所示。

表1 电机的参数
电机给定转速为1 000 r/min,空载起动,0.08 s时转速上升至2 200 r/min,仿真结果如图5所示。图5(a)为电机定子间的线电压;图5(b)为转速辨识与电机实测转速的仿真图,从图5(b)中可知,辨识转速的波动较小,较好地跟随电机的实际转速;图5(c)为转速的误差图,由图5(c)可知,电机的在稳态时误差很小,响应速度快;图5(d)为电机的输出转矩;图5(e)为定子电流;图5(f)为转子磁链运行轨迹图。
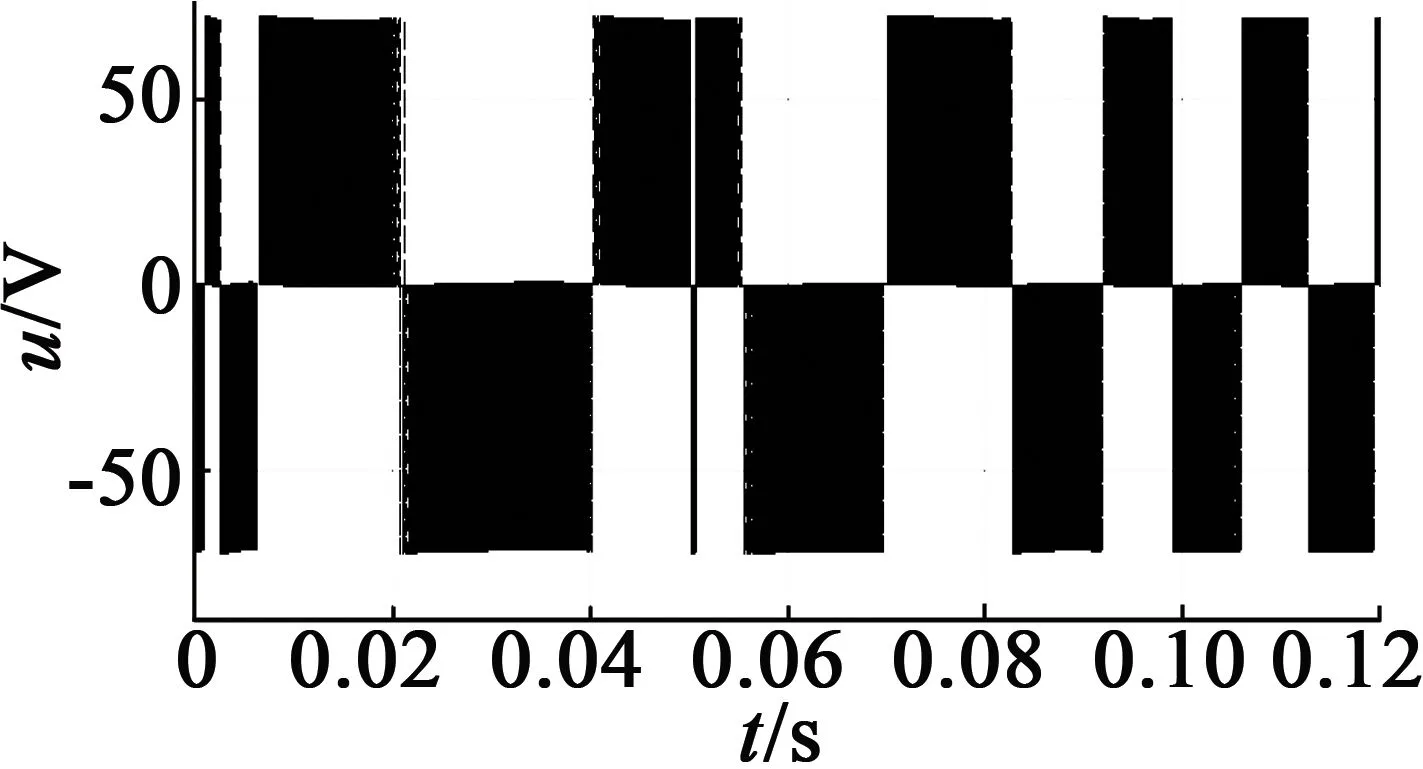
(a) 定子线电压

(b) 转速响应
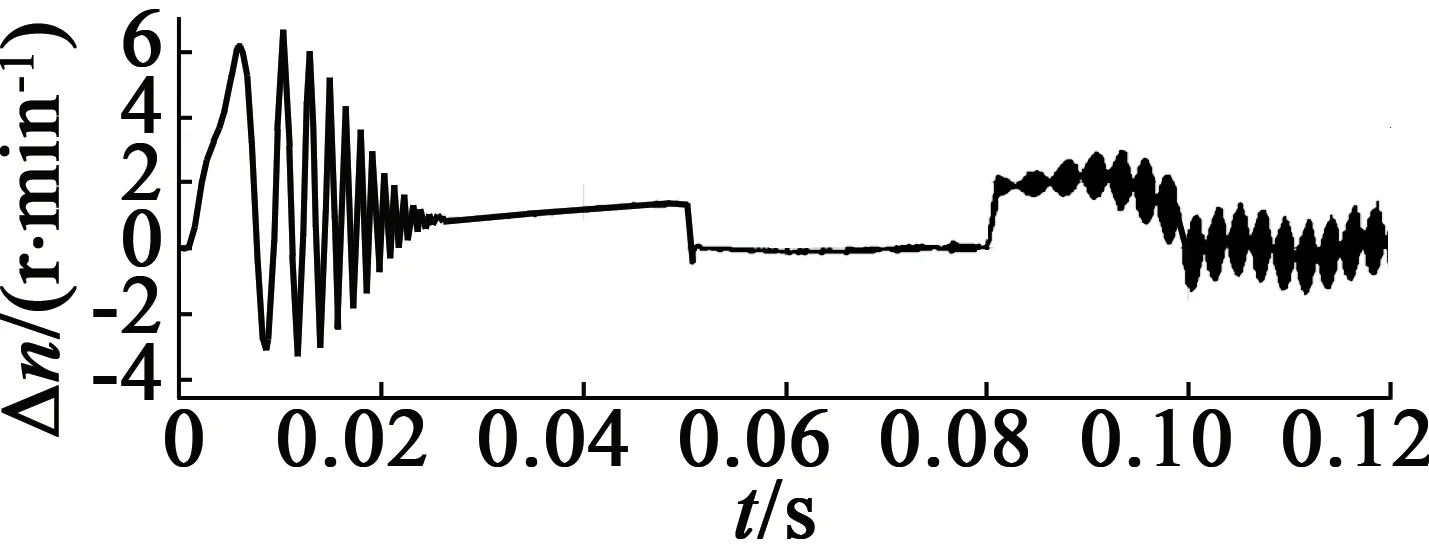
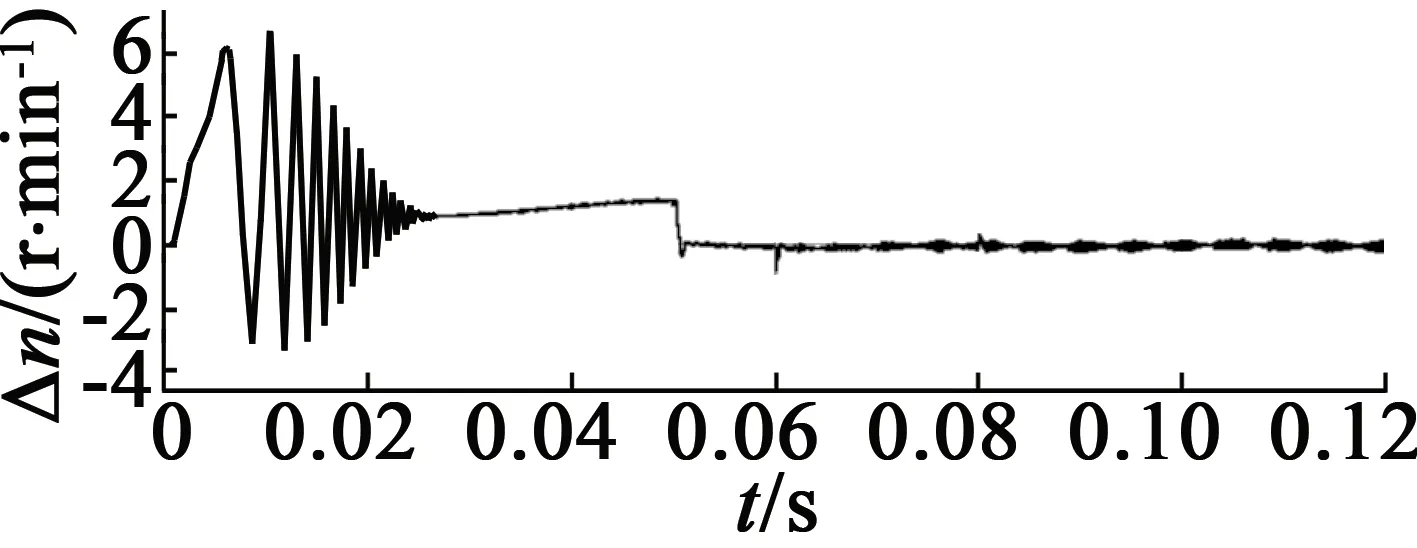
(c) 转速误差

(d) 电磁转矩

(e) 定子电流
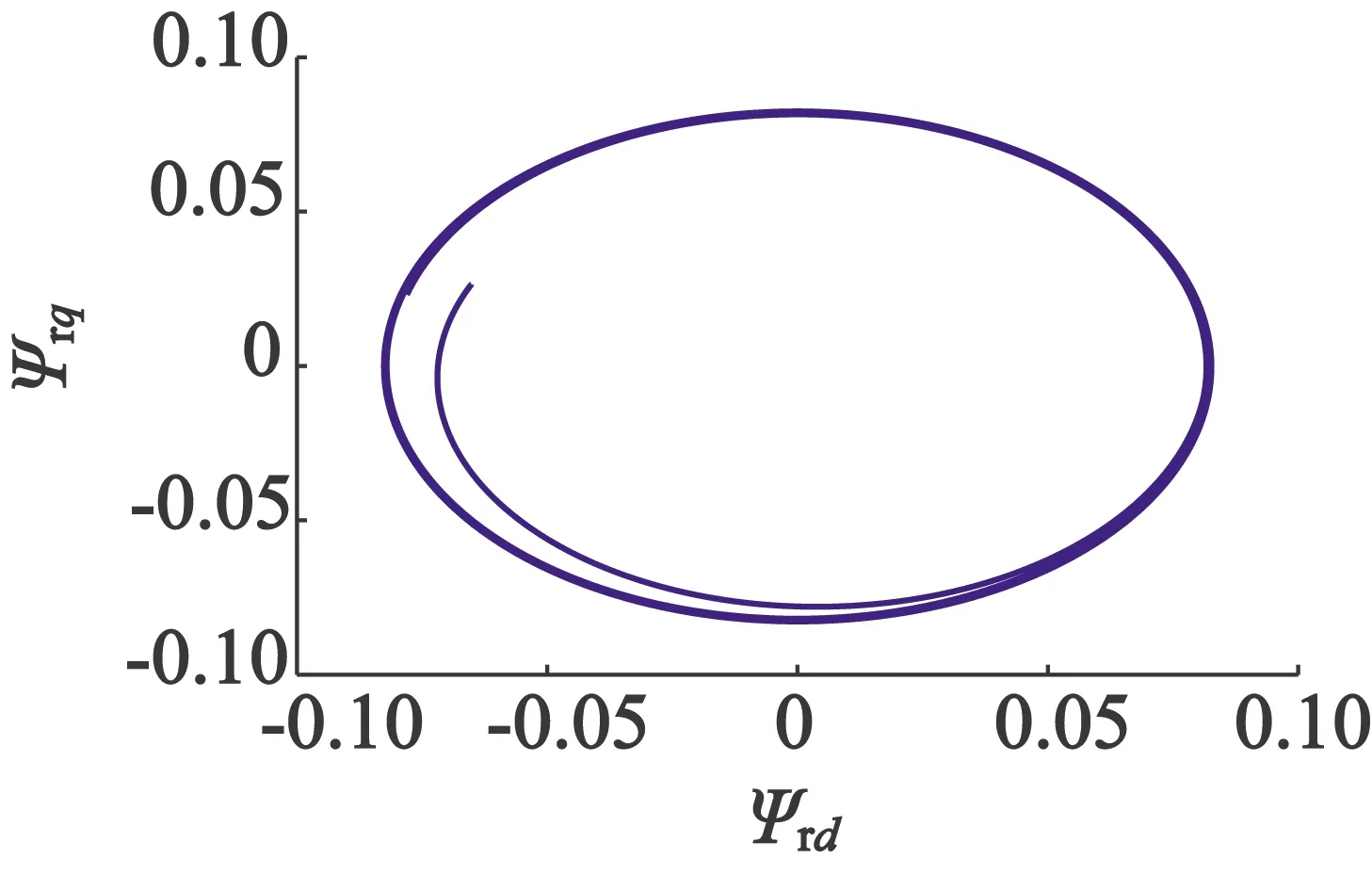
(f) 转子磁链
图6给定电机转速为1 000 r/min,在0.06 s突加负载20 N·m,0.08 s时负载减至10 N·m的仿真结果。从图6中可知,突加负载后转速略有下降,但立即恢复。

(a) 定子线电压

(b) 转速响应
(c) 转速误差

(d) 电磁转矩

(e) 定子电流
4 结 语
本文以转子磁链的电压模型和电流模型作为MRAS速度观测器的参考模型和可调模型,采用了一阶惯性滤波环节消除电压模型中的纯积分问题,利用ADALINE在线权值修正的特点,设计了一种自适应神经元PID控制器,并将此控制器作为MRAS结构中的自适应机制。最后在转速为1 000 r/min和2 200 r/min的情况下进行了仿真验证,其结果表明,电机速度辨识精度较高,动态性能也得到了改善。
