安装液压互联悬架铰接车辆的稳定性研究
2020-03-02李洪雪李世武孙文财杨志发
李洪雪,李世武,孙文财,杨志发
(吉林大学 交通学院,吉林 长春130022)
相对于单体货物运输车辆而言,铰接式牵引-半挂车具有质心高、承载重量大及鞍座参数复杂的特点,使得其在高速变道工况下行驶极容易发生折叠、侧翻的车身失稳现象[1].近十年来用于提高车辆稳定性的液压互联悬架(HIS)先后在越野车上和乘用车上被国内外学者[2-4]深度研究.文献[5]中采用非线性有限元方法,实现了耦合的机械液压互联悬架系统的频域模型推导.文献[6]的研究表明,配备HIS系统的SUV操纵性能与原车相比有了显著提高,其系统提供的可变刚度和阻尼有利于为车辆提供侧翻阻力.周敏等[7]设计液压互联悬架取代传统横向稳定杆的越野样车.随之,郭耀华等[8]针对某客车开发了替代原车减振器和横向稳定杆的安装HIS样车,实车试验证明该系统不降低平顺性的同时,能显著提高操纵稳定性能.章杰等[9]对矿山车辆的板簧悬架进行HIS的样车装配,坑道制动测试表明HIS可有效改善矿山车辆的舒适性和抗俯仰能力.丁飞等[10-11]针对三轴直列卡车得出了HIS对提供的附加扭转刚度和阻尼受到液压元件参数约束的结论.此外,HIS对雷克萨斯470、200系列丰田陆地巡洋舰等[12]车型的市场反应良好.从上述成果看出,关于HIS研究内容目前主要集中在越野车、乘用车、客车和三轴重型车的侧倾、垂向、俯仰、扭转运动方面的性能,但基本未涉及在包含鞍座的铰接车辆领域的应用研究.
因此,本文针对当前HIS性能在铰接车辆方面研究较少的缺陷,考虑铰接车辆的复杂性和实际经费的要求,提出辅助铰接车辆半挂车体悬架的抗侧倾液压互联系统.通过传递矩阵方法建立了抗侧倾液压互联悬架的频域模型,并用侧倾位移传递函数验证所建模型的正确性,同时根据复模态振动理论获得频域方程的等效侧倾刚度和阻尼,并以此为基础,建立了包含鞍座参数和耦合HIS的三轴铰接车辆动力学模型,在典型高速双移线下仿真验证了HIS能够提高铰接车辆的操纵稳定性,并通过改变鞍座的侧倾、横摆刚度和距离半挂车质心的位置参数进一步优化HIS铰接车辆的车身稳定性,补充了HIS在铰接车辆领域的理论研究.
1 建立半挂车的半车侧倾模型
1.1 机械悬架系统建模
安装抗侧倾液压互联悬架的半挂车侧倾模型如图1所示,其中Om为悬架的侧倾中心,O2为半挂车的质心.
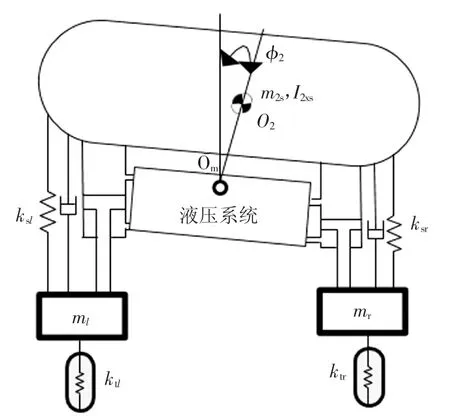
图1 半挂车抗侧倾液压互联悬架布置Fig.1 Anti-roll HIS arrangement of semitrailer
安装液压互联系统的悬架,在液压缸处形成机械与液压系统耦合的边界条件,建立半挂车侧倾模型:

式中:y(t)=[zwlzwrzbφ2]为状态向量,zwl、zwr分别为左、右簧下质量位移,zb为簧载质量位移,φ2为半挂车侧倾角;f(t)=D1Ap(t)为液压系统对悬架提供的支撑力,D1为液压系统动态特性的传递矩阵,面积矩阵A=diag(A1,A2,A3,A4),A1、A2、A3、A4分别为左右作动器上下腔的面积;同时,液压缸相对应的各个腔室产生的压力向量p(t)=(p1,p2,p3,p4)T;M,C,K,Fg(t)分别为车辆的质量、阻尼、刚度矩阵和系统外的道路激励.
1.2 液压互联系统建模
图2为液压互联悬架示意图.其中,q1、q2、q3、q4分别为左右作动器上下腔室的流量;R1、R2、R3分别为连接作动器上腔、下腔和蓄能器的阻尼阀,因不同液压元件相邻节点的状态量相同,按照流体流动的方向(X1,X2所指方向)将管路分别离散化1~12段和1′~12′段,建立各液压元件的传递函数矩阵[13],各个传递函数矩阵相乘得到管路X1的通路矩阵为:
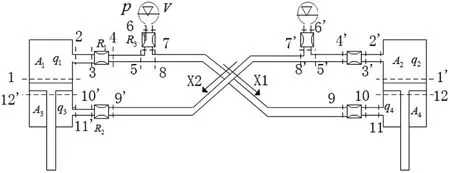
图2 液压互联悬架示意图Fig.2 Schematic of HIS

式中:Λ代表液压缸和液压油管的传递矩阵;Ω为阻尼阀的传递矩阵.将通路矩阵X1的管路左上端和右下端处的压力P和流量q关系写成矩阵形式:

同理,对于线路X2,其通路矩阵为:

频域中流量Q(s)和压力P(s)的线性传递关系由液压互联系统总阻抗矩阵Z(s)描述,结合公式(2)~(4)有:

其中,阻抗矩阵为:
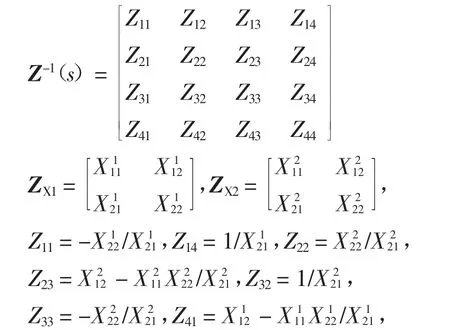

表1 HIS系统相关参数取值Tab.1 The values of HIS parameters
1.3 机械-液压耦合系统的边界条件
HIS主要工作过程为:车辆运动导致左右两侧悬架拉伸和压缩,悬架位移的变化引起作动器行程的变化,推动管路的油液流进和流出蓄能器,两侧蓄能器由此形成的压力差反作用于作动器,从而抵制车辆的侧倾趋势[14-15].左右作动器运动速度vl、vr用左右车轮位移ywl、ywr及悬架位移yv分别表示为:

活塞运动引起左右作动器上腔流量q1和q2,下腔流量q3和q4的变化,简化为:

将式(8)~(11)写成矩阵形式:

式中:D2为线性传递矩阵.将式(12)进行拉普拉斯变换,代入式(1)中,得到:

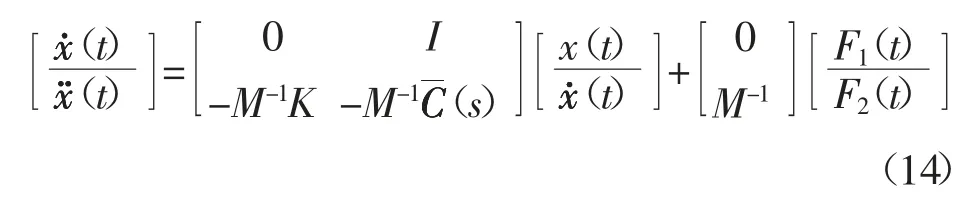
进一步将式(14)换成频域方程为[16]:

由式(15)看出,该频域方程代表的液压互联悬架系统具有典型的频域依赖特性[17],矩阵A(s)中的元素会随着激振频率的变化而变化,因此采用复模态振动理论求解系统的特征根,即在MATLAB下求解局部极小的拉普拉斯算子s=a±bi,再将找到的该值代入特征矩阵A(s)中进行对比,直到两个值相等即结束寻根过程.所获得的侧倾模态的特征根即为侧倾振动模态的固有频率,利用该频率获得HIS的等效刚度和等效阻尼,为整车耦合HIS动力学建模奠定基础.
2 整车耦合HIS的动力学建模
针对某三轴铰接车辆,采取仅半挂车单轴悬架左右两作动器的互联方式,建立包含鞍座参数特性的耦合HIS的牵引-半挂车动力学模型如图3所示.
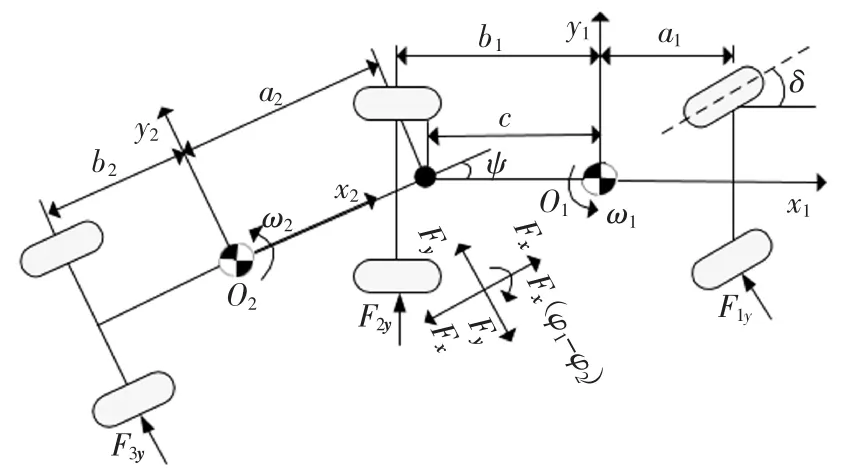
图3 铰接车辆简化模型Fig.3 Simplified model of articulated vehicle
为实现验证抗侧倾HIS对于铰接车辆车身稳定性影响的研究,模型忽略了整车的俯仰运动,即只考虑鞍座的纵向和横摆转动;假定牵引车和半挂车的侧倾轴线与各自的纵轴线重合,非悬挂的质心落在各自的侧倾轴线上;牵引车和半挂车纵向速度相等[18-19].模型参数符号见表2.
牵引车动力学方程[20]为:
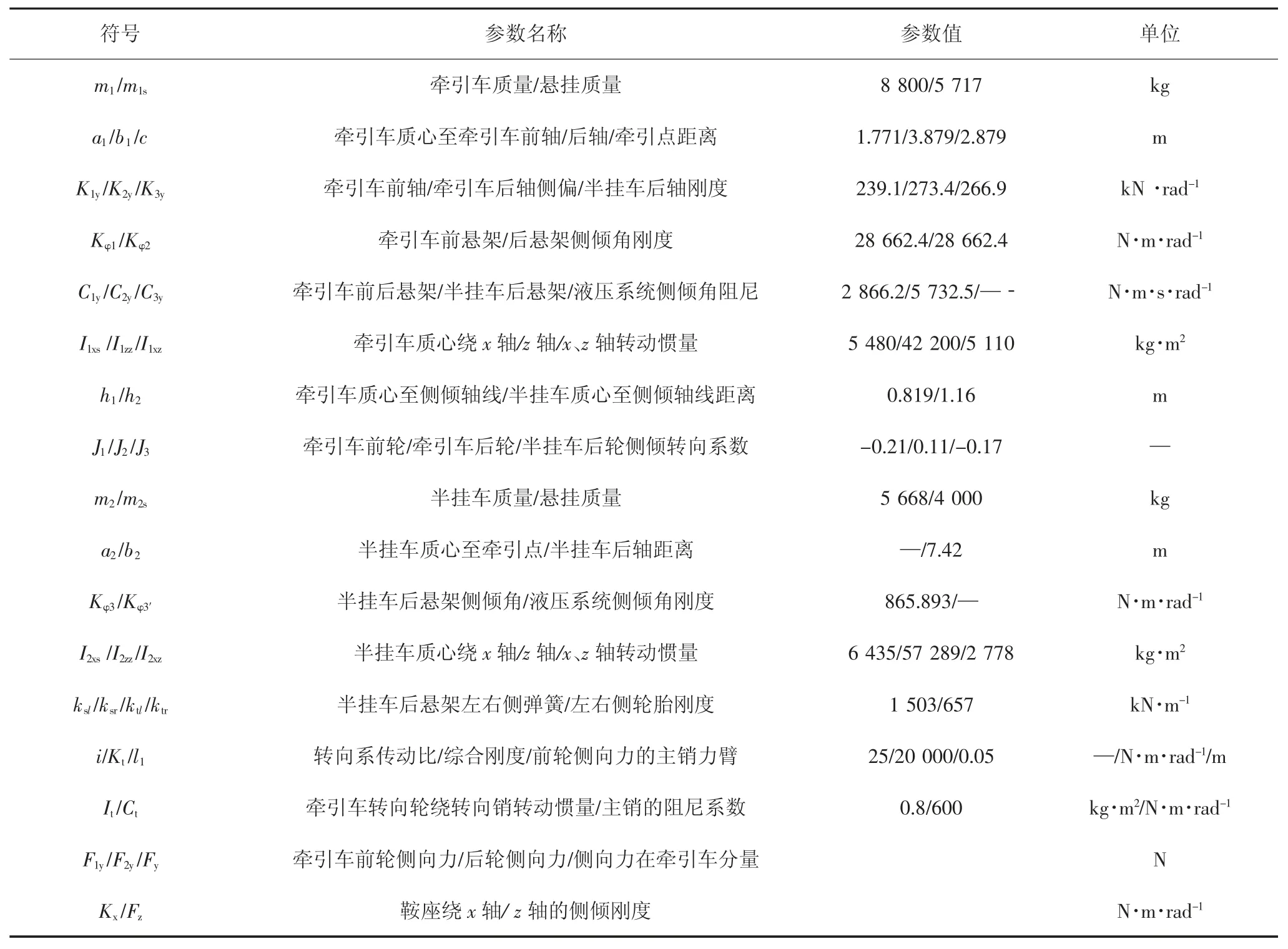
表2 铰接车辆物理参数取值Tab.2 Values for articulated vehicle parameters

加入牵引车转向系自由度,牵引车转向系统的方向盘转角δw和牵引车前轮转角δ可通过牵引车横向车速v1,牵引车纵向车速u1,牵引车横摆角ω1,牵引车侧倾角φ1进行表示,具体关系确定如下[21]:
根据牵引车和半挂车的连接条件,半挂车横摆角ω2,两车铰接角ψ关系可表示为:

牵引车纵向力在牵引车上的分量Fx由半挂车后轮侧向力F3y表示为:


3 操稳分析和鞍座参数优化
3.1 频域模型的验证
在MATLAB中根据式(15)得到左轮激励下液压悬架传递函数曲线,并与同等条件下传统悬架传递函数曲线对比,如图4所示.由图4中看出,由于附加液压作动器的主要作用,传统悬架和液压互联悬架曲线在侧倾响应中均有一个峰值,且峰值以后曲线呈下降趋势,具有很大相似性.
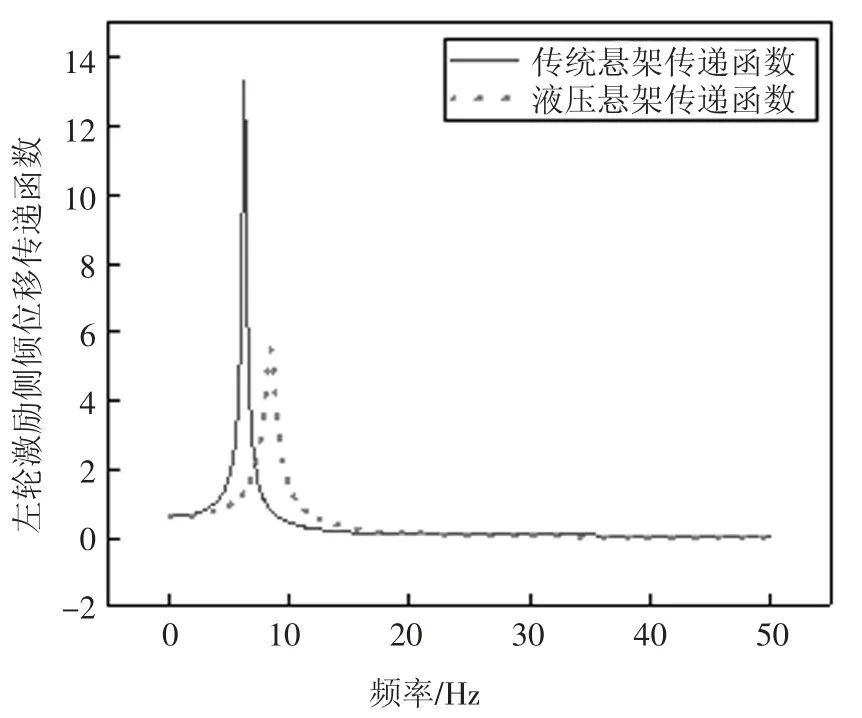
图4 侧倾位移传递函数Fig.4 Roll displacement transfer function
液压互联悬架的固有频率8.48 Hz较传统悬架6.28 Hz提升了26%,且液压互联悬架5.48的幅值与传统悬架13.35的幅值相比,降低了59%,充分证明了所建悬架模型能够提高固有频率,从而增大侧倾刚度和阻尼,提升悬架的抗侧倾能力.
3.2 双移线工况仿真
本文选取典型的双移线作为铰接车辆操纵稳定性能的测试工况,设置车辆前进速度为80 km/h,轨迹的道路偏移量为3.5 m,在不同参数条件下,运用MATLAB程序进行仿真,输出结果分别如图5~图8所示(牵引车曲线结果和半挂车类似,故省略给出).其中,No HIS符号代表半挂车未安装液压互联悬架系统的铰接车辆,HIS符号代表半挂车安装液压互联悬架系统后的铰接车辆.
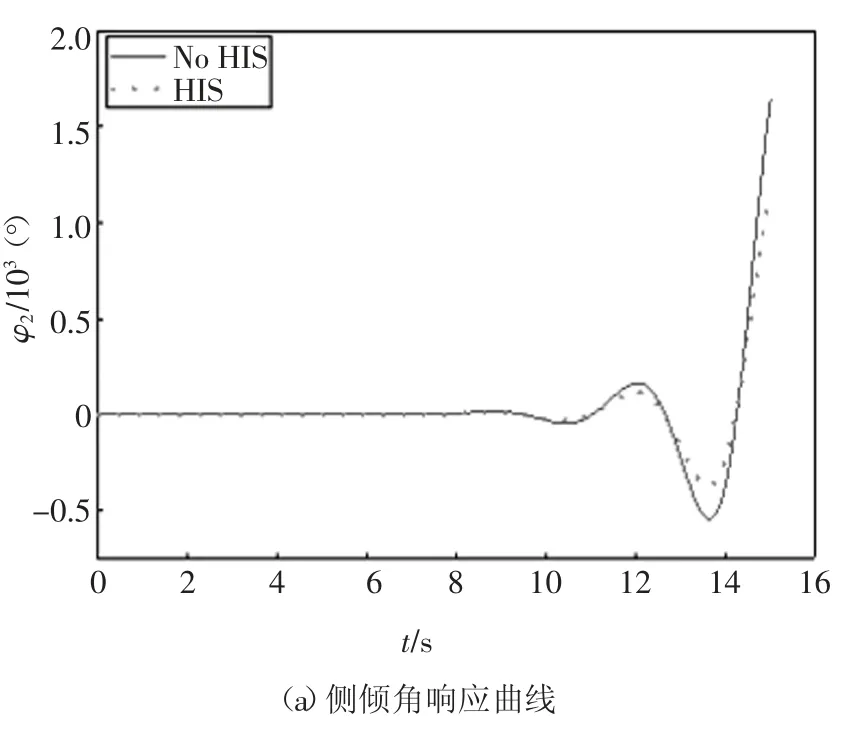
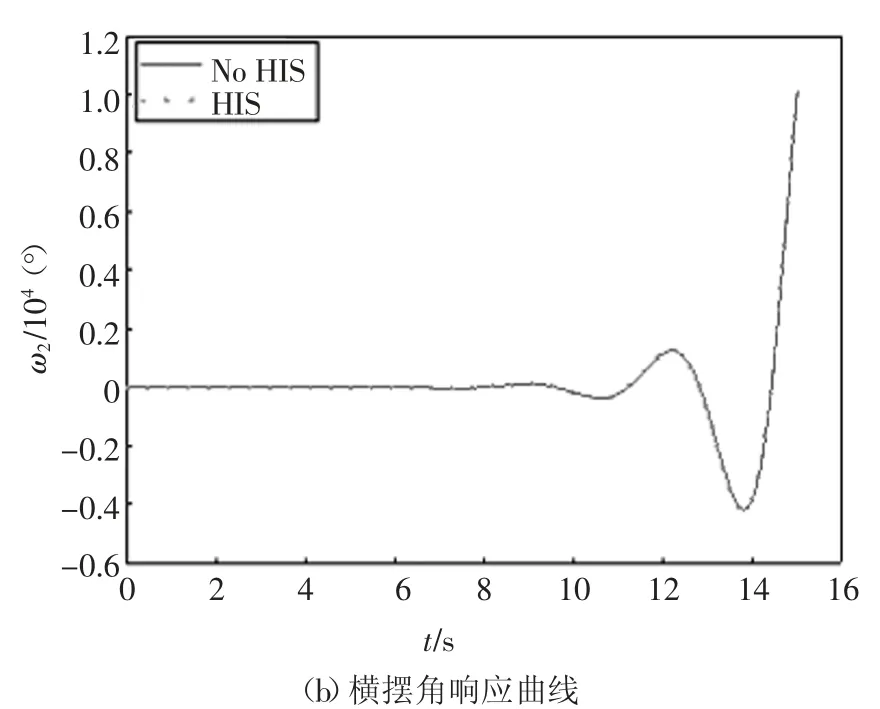
图5 侧倾和横摆刚度均为0时,半挂车车身响应曲线Fig.5 Semi-trailer body response when roll and yaw stiffness are 0
图5为鞍座侧倾刚度和横摆刚度同时等于0时,半挂车车身响应曲线.由图5(a)可以看出,仅安装HIS的半挂车侧倾角的最大值约减小了30%;图5(b)中半挂车横摆角无显著变化.因此,当不考虑鞍座侧倾横摆刚度时,HIS只能单一地提高半挂车的侧倾刚度保持车身姿态的平稳。
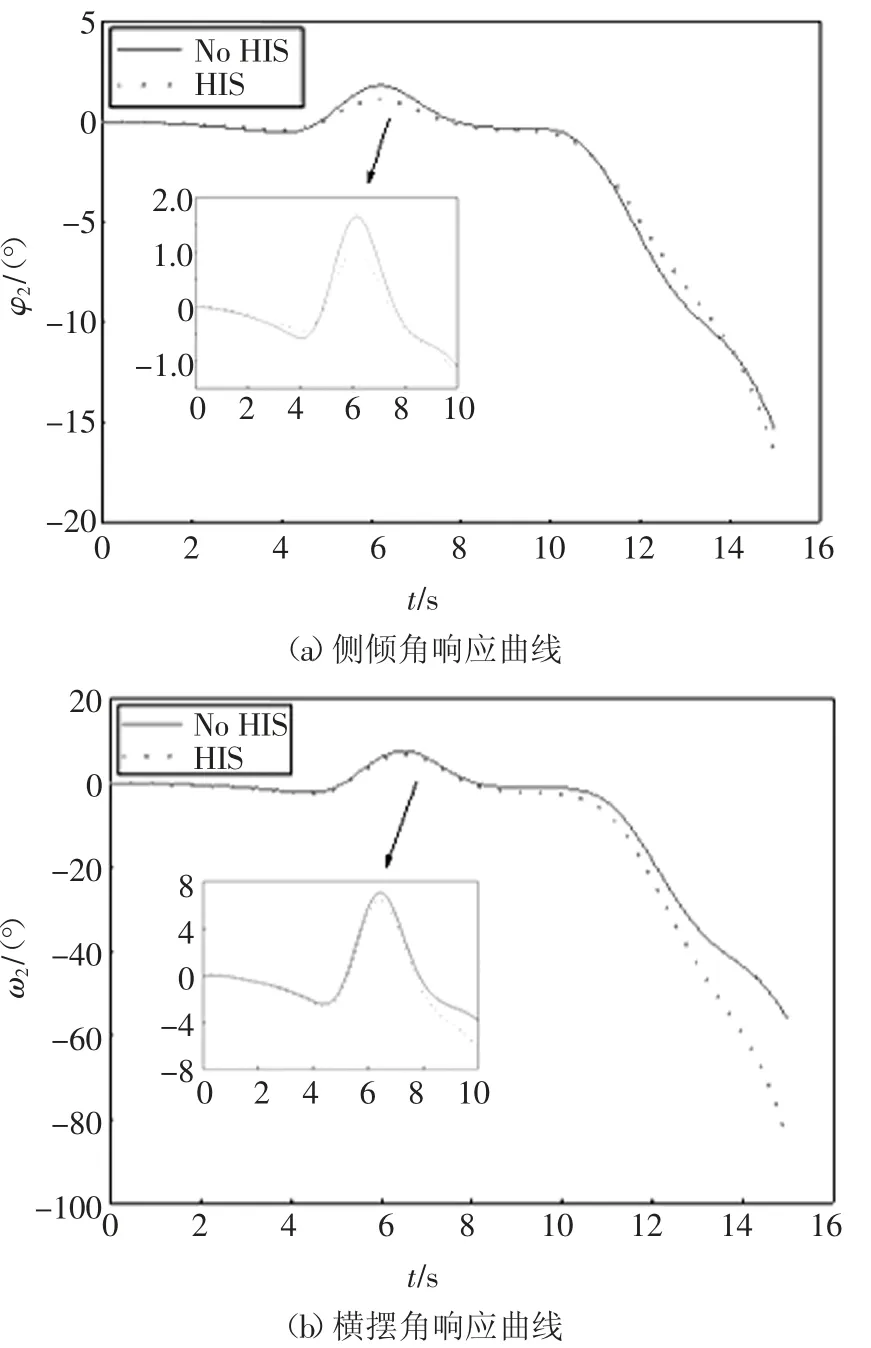
图6 侧倾刚度不等于0,横摆刚度等于0时,半挂车车身响应曲线Fig.6 Semi-trailer body response when roll stiffness is not 0 and yaw stiffness is 0
选取原车鞍座的侧倾刚度参数等于2 484 057 N·m/rad时,设置鞍座横摆刚度为0,验证HIS铰接车辆和原车输出响应如图6所示.从图6(a)可以看出,考虑鞍座侧倾刚度时,HIS车辆的半挂车的最大侧倾角由1.65°降到1.03°左右,减小了约38%;从图6(b)中可以看出,半挂车最大横摆角从7.08°左右降到6.39°左右,大约减小了10%;由此说明装有HIS和仅配置鞍座侧倾刚度参数车辆的侧倾运动和横摆运动能够有效地被抑制.
图7 侧倾刚度不等于0,横摆刚度变化时,半挂车车身响应曲线Fig.7 Semi-trailer body response when roll stiffness is not 0 and yaw stiffness varies
铰接车辆在安装HIS的基础上,考虑上述侧倾刚度参数不变,设置横摆刚度分别为0、500、10 000 N·m/rad时,半挂车车身响应曲线如图7所示.由图7(a)可以看出,半挂车侧倾角的最大峰值可在鞍座横摆刚度最大值为10 000 N·m/rad时,由1.03°降低为0.83°左右,减小了19%;图7(b)中的半挂车横摆角的最大峰值6.39°降低为5.26°,减小了18%;从图7(c)可以看出半挂车的最大铰接角减小16%左右.结果表明装有HIS和配置鞍座侧倾刚度参数的车辆,增大横摆刚度能使整车的稳定性得到进一步提升.
图8所示为半挂车质心至牵引点的距离等于0.8 m时,装有HIS车辆与在此HIS车辆基础上改变距离参数分别为0.5 m,1.1 m的对比图.由图8(a)可以看出,当半挂车质心至牵引点距离等于0.5 m时,相比原HIS车辆,HIS车辆的半挂车最大侧倾角略有降低;当半挂车质心至牵引点距离等于1.1 m时,相比原HIS车辆,最大侧倾角略有升高.图8(b)的横摆角和图8(c)的铰接角曲线得到类似结果,这里不再赘述.由此结果表明装有HIS和减小半挂车质心至牵引点的距离的车辆,可进一步提高车辆的稳定性和协调性.
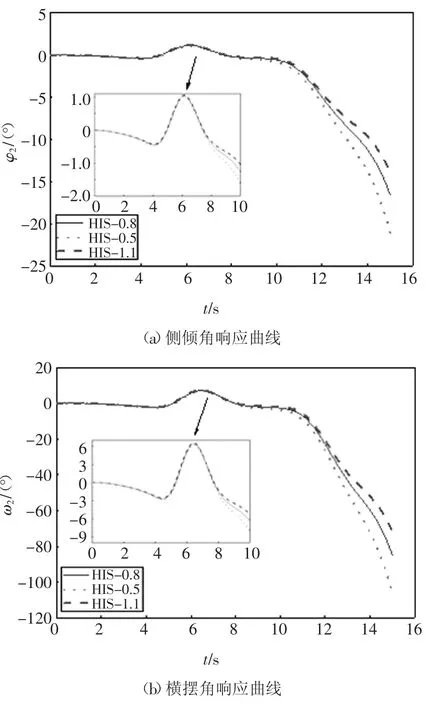
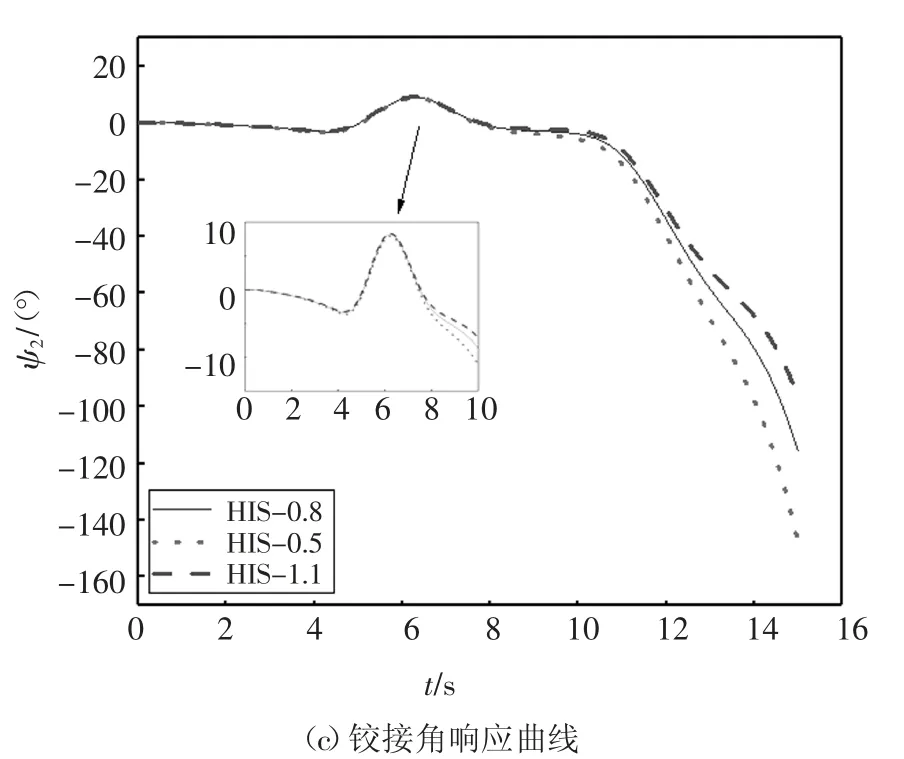
图8 半挂车质心至牵引点的距离变化时,半挂车车身响应曲线Fig.8 Semi-trailer body response when distance between semitrailer mass center and saddle point changes
4 结论
本文以三轴铰接车辆的半挂车单体悬架为基础,通过流体系统传递阻抗法获得与液压互联系统耦合的半车频域模型,运用模态理论法求解该微分方程侧倾模态的固有频率;进一步将固有频率转化为悬架的等效侧倾刚度和阻尼,运用拉格朗日方程推导出三轴耦合HIS系统的牵引-半挂车动力学模型,在MATLAB程序中仿真双移线工况获得车辆侧倾角、横摆角和铰接角的响应.
1)当鞍座的侧倾刚度和横摆刚度均为0时,抗侧倾液压互联悬架只能单一地提高半挂车的侧倾稳定性;
2)当鞍座的侧倾刚度不为0时,抗侧倾液压互联悬架能同时提高牵引车和半挂车的侧倾和横摆稳定性,并同时显著提高整车的协调稳定性.
3)传统铰接车辆在鞍座侧倾刚度不为0和配置HIS系统后,变大鞍座横摆刚度和减小鞍座牵引点至半挂车质心距离能进一步提升装配HIS之后的整车操纵稳定性.
